Спосіб контролю співвісності валів
Номер патенту: 62873
Опубліковано: 15.12.2005
Автори: Грядущий Борис Абрамович, Чехлатий Микола Олександрович, Мялковський Валентин Йосипович, Логвиненко Володимир Іванович
Формула / Реферат
Спосіб одержання металевого порошку включає підготовку шихти на основі стружкових відходів чавуну, її термічну обробку, подрібнення спеку та розсів отриманого порошку. В процесі підготовки шихти стружкові відходи чавуну змішують з порошком або стружкою титану. Термічна обробка шихти включає відпал в середовищі нейтральних газів, водню або в вакуумі.
Текст
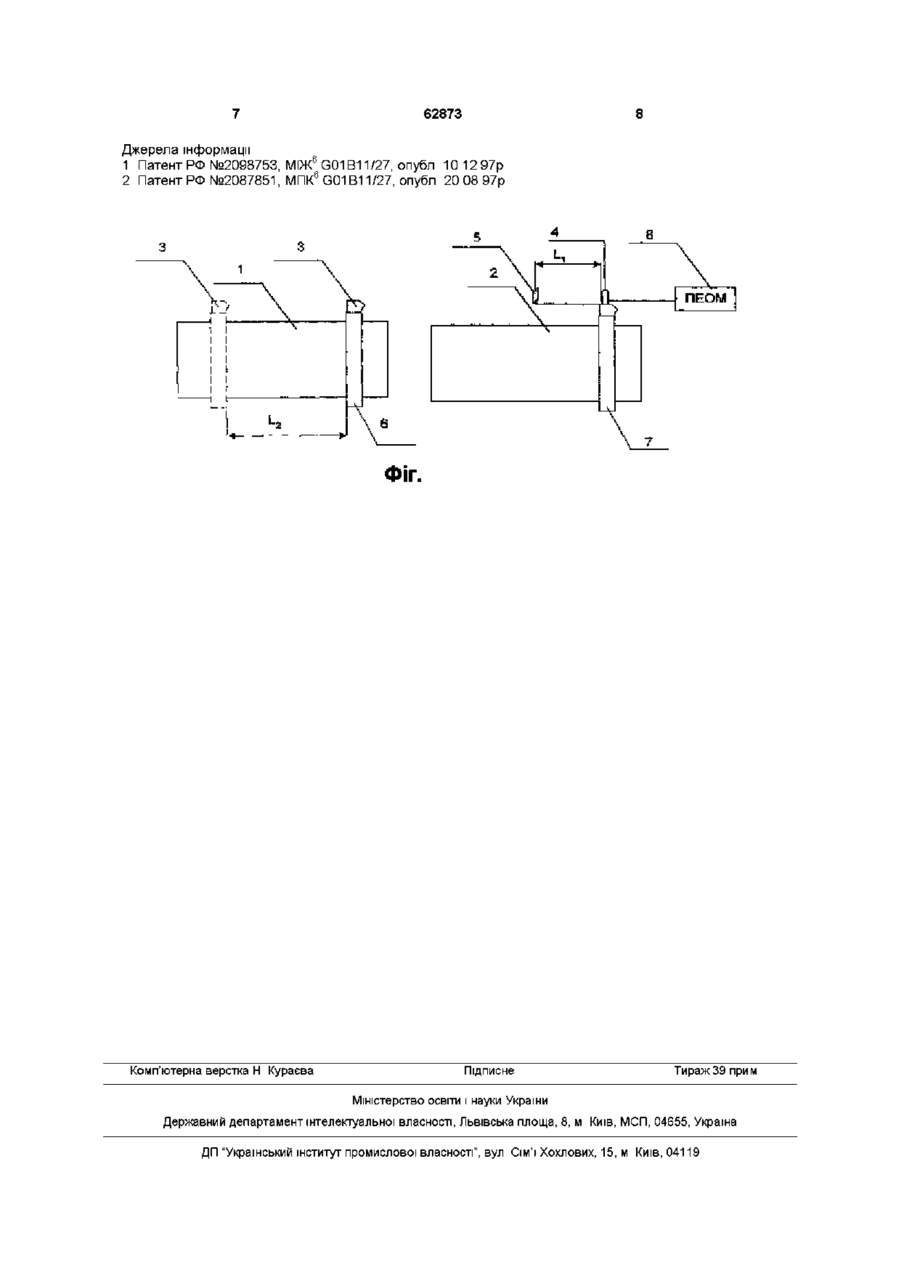
Спосіб контролю СПІВВІСНОСТІ валів, ВІДПОВІДНО до якого на бічній поверхні першого вала встановлюють механізм закріплення з джерелом лазерного випромінювання, а на бічній поверхні другого вала механізм закріплення з телевізійною камерою, джерело лазерного випромінювання розташовують у горизонтальній площині, а телевізійну камеру розташовують паралельно до геометричної осі другого вала, який відрізняється тим, що між механізмами закріплення джерела лазерного випромінювання і телевізійною камерою на відстані І_і від останньої встановлюють екран, направляють на екран промінь від джерела лазерного випромінювання таким чином, щоб відображення світлової плями на екрані монітора персональної ЕОМ знаходилося в його геометричному центрі, визначають координати центра світлової плями, після цього повертають обидва вали в одному напрямку на 90°, 180°, 270° і щораз фіксують координати, порівнюють отримані результати контролю, виконують попереднє юстирування першого і другого валів, потім встановлюють екран поруч з Винахід відноситься до області вимірів і може бути використаний для контролю СПІВВІСНОСТІ валів обертових механізмів, зокрема, великих стаціонарних установок Спосіб контролю СПІВВІСНОСТІ валів обертових агрегатів [1] — це спосіб, ВІДПОВІДНО ДО ЯКОГО на одному з валів закріплюють магнітом паралельно геометричної осі консолі Розглядають консоль як продовження бічної поверхні вала, а торець консолі — як частину бічної поверхні другого вала На бічній поверхні другого вала закріплюють телеві об'єктивом телевізійної камери, проводять новий цикл контролю неспіввісності валів, при якому за вихідне положення приймають верхнє розташування джерела лазерного випромінювання, телевізійної камери й екрана, визначають за допомогою персональної ЕОМ ВИХІДНІ координати центра світлової плями, повертають на 90°, 180°, 270° і щораз визначають координати центра світлової плями, порівнюють отримані результати контролю і по них судять про горизонтальний і вертикальний зсуви валів, переміщають джерело лазерного випромінювання на відстань І 2 у вертикальній пло_ щині паралельно до геометричної осі першого вала, визначають координати центра світлової плями і порівнюють з ВІДПОВІДНИМ попереднім виміром, визначають зсув центра світлової плями щодо вихідного (0°) положення по вертикалі (Ду-і), повертають на 90° і знову визначають координати центра світлової плями і його відхилення по горизонталі Ах-і щодо ВІДПОВІДНОГО попереднього виміру, знову повертають обидва вали на 90° і аналогічно визначають А у 2 , а потім ще раз повертають на 90° і визначають Ах 2 і кутові зсуви осей валів у вертикальній a = arctg = arctg АУ!+ДУ 2 2L 2 Дх1+Дх2 2L2 і горизонтальній площинах зійну камеру, розташовуючи в полі зору телеоб'єктива вільний кінець консолі Синхронно повертають обидва вали в одну сторону і фіксують телевізійною камерою розташування консолі Наявність вертикального і горизонтального зсуву кінця консолі свідчить про не СПІВВІСНІСТЬ валів Однак використання даного способу при контролі не СПІВВІСНОСТІ вилучених валів великих стаціонарних установок не дало бажаного результату через значну деформацію консолі і зв'язаної з цим погрішності у визначенні неспіввісності ГО 00 (О Відомий також обраний як прототип оптичний пристрій контролю положення об'єктів [2] , ВІДПОВІДНО до якого на бічній поверхні першого вала встановлюють механізм закріплення з джерелом лазерного випромінювання , а на бічній поверхні другого вала механізм закріплення з телевізійною камерою Відомий пристрій передбачає після фіксації вихідних координат світлового променя поворот обох валів в одному напрямку, визначення в блоці обробки інформації точності центрування валів Оскільки спосіб вимагає фіксування телевізійною камерою просторового розташування променя після повороту вала, то при значних відхиленнях валів і наявності кутової складової не СПІВВІСНОСТІ, промінь від джерела лазерного випромінювання не попадає в поле зору фотоприймального вікна телевізійної камери, що не дозволяє з високою точністю контролювати СПІВВІСНІСТЬ валів Крім того, до недоліку відомого пристрою варто віднести зниження вірогідності контролю СПІВВІСНОСТІ валів через значний вплив величини фотоприймального вікна телевізійної камери на результати виміру Пропонований винахід вирішує задачу створення способу контролю СПІВВІСНОСТІ валів, який при його здійсненні забезпечує досягнення технічного результату, що полягає в розширенні області застосування й у підвищенні точності контролю СПІВВІСНОСТІ валів Поставлена задача вирішується так, що при реалізації способу контролю СПІВВІСНОСТІ валів на бічній поверхні першого вала встановлюють механізм закріплення з джерелом лазерного випромінювання, а на бічній поверхні другого вала механізм закріплення з телевізійною камерою, джерело лазерного випромінювання розташовують у горизонтальній площині, а телевізійну камеру розташовують паралельно до геометричної осі другого вала ВІДПОВІДНО ДО винаходу між механізмами закріплення джерела лазерного випромінювання і телевізійною камерою на відстані І_і від останньої встановлюють екран, направляють на екран промінь від джерела лазерного випромінювання таким чином, щоб відображення світлової плями на екрані монітора персональної ЕОМ знаходилося в його геометричному центрі, визначають координати центра світлової плями, після цього повертають обидва вали в одному напрямку на 90°, 180°, 270° і щораз фіксують координати, порівнюють отримані результати контролю, виконують попередню юстировку першого і другого валів, а потім встановлюють екран поруч з об'єктивом телевізійної камери, проводять новий цикл контролю не СПІВВІСНОСТІ валів, при якому за вихідне положення приймають верхнє розташування джерела лазерного випромінювання, телевізійної камери й екрана, визначають за допомогою персональної ЕОМ ВИХІДНІ координати центра світлової плями, повертають на 90°, 180°, 270° і щораз визначають координати центра світлової плями, порівнюють отримані результати контролю і по них судять про горизонтальний і вертикальний зсуви валів, переміщають джерело лазерного випромінювання на відстань І_2 у вертикальній площині паралельно до 62873 геометричної осі першого вала, визначають координати центра світлової плями і порівнюють з ВІДПОВІДНИМ попереднім виміром, визначають зсув центра світлової плями щодо вихідного (0°) положення по вертикалі (Луї), повертають на 90° і знову визначають координати центра світлової плями і його відхилення по горизонталі Дхі щодо ВІДПОВІДНОГО попереднього виміру, знову повертають обидва вали на 90° і аналогічно визначають Дуг, а потім ще раз повертають на 90° і визначають Дхг і кутові зсуви осей валів у вертикальній АУі+Ау2 а = arctg горизонтальніи 2L Дх-і + Дх-> Р = arctg— ! площинах 2І_2 Спосіб, що заявляється, реалізується наступним чином На бічній поверхні першого вала встановлюють механізм закріплення з джерелом лазерного випромінювання, а на бічній поверхні другого вала встановлюють механізм закріплення з телевізійною камерою, джерело лазерного випромінювання розташовують у горизонтальній площині, а телевізійну камеру розташовують паралельно геометричної осі другого вала На відстані І_і від телевізійної камери встановлюють екран Необхідну відстань І_і вибирають за умовою, забезпечення при не СПІВВІСНОСТІ валів оптичного зв'язку джерела лазерного випромінювання і фотоприймача, тобто щоб світлова пляма, яка відображена на екрані, попадала в поле зору фотоприйомального вікна телевізійної камери Якщо не СПІВВІСНІСТЬ валів знаходиться в межах улучення променя у фотоприймальне вікно телевізійної камери, то І_і = 0, і в цьому випадку екран виконує функцію світлофільтра, захищаючи телевізійну камеру від зайвого світла Якщо відхилення променя світла перевищують розміри фотоприймального вікна, то встановлюють екран так, щоб кут зору об'єктива охоплював максимальне відхилення променя світла по горизонталі і по вертикалі При визначенні не СПІВВІСНОСТІ за вихідне положення приймають верхнє розташування джерела лазерного випромінювання, екрана і телевізійної камери За допомогою телевізійної камери фіксують первісне положення світлової плями, розташованої на екрані монітора персональної ЕОМ, і визначають координати и центра Повертають обидва вали в одному напрямку на кут 90°, фіксують нове положення світлової плями і знову визначають координати центра Далі заданий дискретний кут повороту валів змінюють до 360° і щораз, порівнюючи отримані результати контролю, судять про СПІВВІСНІСТЬ валів по горизонталі і вертикалі Підвищують точність контролю не СПІВВІСНОСТІ валів шляхом усунення виявленої не СПІВВІСНОСТІ й установки екрана поруч з об'єктивом телевізійної камери Фіксують ВИХІДНІ координати світлової плями від джерела лазерного випромінювання за допомогою телевізійної камери, після цього повертають синхронно обидва вали в одному напрямку на 90°, 180°, 270° і щораз визначають координати центра світлової плями Переміщують джерело лазерного випромінювання на відстань І_2 у вертикальній площині паралельно до геометричної осі першого вала Фіксують координати світло 62873 ТІ екран 5 установлюють поруч з об'єктивом телевоі плями за допомогою телевізійної камери і порівізійної камери 4, тобто І_і =0 У цьому випадку внюють з попереднім виміром При наявності зсуву екран 5 виконує функцію світлофільтра, захищаюцентра світлової плями щодо вихідного (0°) полочи приймач телевізійної камери 4 від зайвого світження визначають величину його зсуву по вертила Процес попереднього контролю та усунення не калі (Луї), потім обидва вали повертають в одному СПІВВІСНОСТІ валів 1,2 закінчений, і для підвищення напрямку на кут 90° і визначають величину зсуву точності в пропонованому способі проводяться по горизонталі (Дх-і) щодо ВІДПОВІДНОГО поперевиміри в нових умовах За вихідне положення приднього виміру Після наступного повороту валів на ймають верхнє розташування джерела лазерного 90° визначають величину зсуву по вертикалі (Дуг), випромінювання 3, екрана 5 і телевізійної камери 4 а після повороту ще на 90° визначають відхилення Фіксують ВИХІДНІ координати світлового променя по горизонталі (Дхг) За отриманими результатами телевізійною камерою 4 і визначають за допомообчислюють кутові зсуви осей зцентрованих магою персональної ЕОМ 8 координати центра мітки . Ду-, + Д у Повертають синхронно обидва вали в одному на! шин у вертикальній а = a r c t g — і горизонпрямку на 90°, 180°, 270° і щораз визначають ко2І ординати центра, порівнюють отримані результа+ Дхтальніи р = arctg ти, по яким судять про горизонтальний і -площинах 2І_ вертикальний зсуви валів 1,2 Процес контролю СПІВВІСНОСТІ валів різних меПереміщають джерело лазерного випромінюханізмів закінчується після визначення кутових і вання 3 на відстань І_2 у вертикальній площині парадіальних зсувів валів ралельно геометричної осі вала 1 Фіксують коорНа фіг 1 приведена схема пристрою, за доподинати світлового променя за допомогою могою якого реалізується спосіб контролю СПІВВІСтелевізійної камери 4 і порівнюють з попереднім НОСТІ валів виміром При наявності зсуву центра мітки на екПристрій містить вали 1 і 2, джерело лазернорані монітора щодо вихідного (0°) положення виго випромінювання 3, телевізійну камеру 4, екран значають її зсув по вертикалі (Дуі) Після цього 5, механізми закріплення 6 і 7, персональну ЕОМ обидва вали синхронно повертають на 90°, і опе8 ратор знову фіксує положення мітки на екрані моПристрій, що реалізує даний спосіб, працює нітора і її координати Визначають зміни координатаким чином ти по горизонталі Дхі щодо ВІДПОВІДНОГО Для контролю СПІВВІСНОСТІ валів 1 і 2 установпопереднього виміру Повертають обидва вали на люють на бічній поверхні вала 1 механізм закріп90° і аналогічно визначають Дуг, а потім поверталення 6, а на бічній поверхні вала 2 механізм зають ще на 90° і визначають Дхг кріплення 7, джерело лазерного випромінювання Розраховують кутовий зсув осей зцентрованих розташовують у горизонтальній площині, а телеві. Ду-, + Д у зійну камеру розташовують паралельно до геомемашин у вертикальній а = a r c t g — ! і горитричної осі другого вала На відстані І_і від телеві2І зійної камери 4 встановлюють екран 5 При + Дхвключенні джерела лазерного випромінювання З зонтальнш р = arctg площинах направляють світловий промінь на екран 5, що відображається на ньому у вигляді світлової пляУ реалізованому пристрої контролю СПІВВІСНОми За допомогою телевізійної камери 4 зобраСТІ валів різних механізмів як телекамера 4 застоження передається до персональну ЕОМ 8, де совується WEB - камера, у якій вікно фотоприймаобробляється за спеціальною програмою і переча має розміри 6х5мм Тому безпосередній дається на екран монітора у вигляді мітки від світконтроль за відхиленням світлового променя облової плями і даних про не СПІВВІСНІСТЬ валів 1,2 по межений розмірами вікна фотоприймача При знагоризонталі X и вертикалі У Оператор наводить чних осьових і радіальних зсувах валів 1,2 відхиджерело лазерного випромінювання 3 на екран 5 лення світлового променя від джерела лазерного таким чином, щоб мітка від джерела лазерного випромінювання 3 не дозволяє здійснити безпосевипромінювання знаходилася в геометричному редній прийом зображення телевізійною камерою центрі екрана монітора, через який проведені осі 4 координат Далі обидва вали синхронно повертаУстановка екрана 5 на відстані І_і від телевіють в одну сторону на кут 90°, і після повної зупинзійної камери 4 дозволяє розширити діапазон конки валів оператор фіксує на екрані монітора пертролю не співвісностей валів 1,2 сональної ЕОМ 8 координати мітки При наявності Пропонований спосіб дозволяє визначити не зсувів зображення щодо первісного положення тільки кутові параметри не СПІВВІСНОСТІ, але й радівизначають величину зсуву мітки по вертикалі і по альні зсуви, чим досягається більш точне позиціогоризонталі Далі заданий дискретний кут повороту нування механізмів і знижується трудомісткість валів 1,2 змінюють до 360° і за результатами контробіт з контролю не СПІВВІСНОСТІ валів різних мехаролю судять про СПІВВІСНІСТЬ валів по горизонталі і нізмів вертикалі Якщо відхилення променя світла переВ даний час в інституті розроблена конструквищують розміри фотоприимального вікна телевіторська документація, виготовлений і випробувазійної камери 4, то екран 5 установлюють на відний пристрій, що реалізує спосіб контролю СПІВВІСстані І_і від телевізійної камери 4, при якому кут НОСТІ валів По результатах ІСПИТІВ прийняте зору фотоприимального вікна охоплює максимарішення про виготовлення дослідної партії прильне відхилення променя світла по горизонталі і строю вертикалі Після усунення виявленої не СПІВВІСНОС2 2 7 62873 Джерела інформації 1 Патент РФ №2098753, МІЖ6 G01B11/27, опубл 10 12 97р 2 Патент РФ №2087851, МПК6 G01B11/27, опубл 20 08 97р ФІГ. Комп'ютерна верстка Н Кураєва Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for checking alignment of shafts
Автори англійськоюHriaduschyi Borys Abramovych, Chekhlatyi Mykola Oleksandrovych, Mialkovskyi Valentyn Yosypovych
Назва патенту російськоюСпособ контроля соосности валов
Автори російськоюГрядущий Борис Абрамович, Чехлатый Николай Александрович, Мялковский Валентин Иосифович
МПК / Мітки
МПК: G01B 11/27, G01B 5/24
Мітки: спосіб, співвісності, контролю, валів
Код посилання
<a href="https://ua.patents.su/4-62873-sposib-kontrolyu-spivvisnosti-valiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю співвісності валів</a>
Пристрій для контролю співвісності щитів статорного блока великих електричних машин
Номер патенту: 57443
Опубліковано: 16.06.2003
Автори: Бражник Олександр Михайлович, Завальнюк Інна Петрівна
МПК: G01B 11/27
Мітки: контролю, електричних, пристрій, статорного, блока, щитів, співвісності, великих, машин
Формула / Реферат:
Пристрій для контролю співвісності щитів статорного блока великих електричних машин, що має корпус для розміщення на контрольному об'єкті, джерело випромінювання і вимірювальні блоки, що складаються з плоских дзеркал і позиційно-чутливих фотоприймачів, який відрізняється тим, що пристрій має два джерела випромінювання і два вимірювальних блоки, розташованих співвісно напроти один одного, при цьому як кожне джерело випромінювання...
Спосіб контролю співвісності отворів в решітках ємкості та пристрій для його здіснення
Номер патенту: 73764
Опубліковано: 15.09.2005
Автори: Галенко Василь Петрович, Рябець Микола Пантелеймонович, Лісовенко Іван Степанович, Распутько Олексій Степанович, Пирогов Олександр Дмитрович, Левун Микола Олександрович
Мітки: контролю, отворів, співвісності, спосіб, здіснення, пристрій, ємкості, решітках
Формула / Реферат:
1. Спосіб контролю співвісності отворів в решітках ємкості, який включає переміщення маніпулятора з підвищеним калібром в зону контролю отворів, установлення ємкості на поворотний стіл і опускання калібра в отвори решіток з наступним підніманням його з отворів, який відрізняється тим, що підвішений калібр оснащують датчиком контролю зусилля і виставляють по базовій осі, а ємкість установлюють з корекцією базового отвору по калібру так, щоб...
Пристрій для контролю співвісності фланця й труби та перпендикулярності ущільнювальної поверхні фланця повздовжній осі труби
Номер патенту: 34222
Опубліковано: 15.02.2001
Автор: Мікульонок Ігор Олегович
МПК: B25B 27/14, F16L 23/00
Мітки: ущільнювальної, фланця, осі, перпендикулярності, повздовжній, поверхні, контролю, співвісності, трубі, пристрій
Текст:
...1, закріплений на ньому стержень 2 з повзуном 3, який може пересуватися вздовж стержня 2 і фіксуватися на ньому в необхідному положенні за допомогою гвинта 4. До повзуна 3 жорстко закріплено тримач 5, на другому кінці якого змонтовано контрольну хрестовин у 6 (фіг. 1, 2). На обох планках контрольної хрестовини 6 рівномірно від її центра нанесені, наприклад, міліметрові поділки (тобто контрольна хрестовина являє собою сукупність чотирьох...
Прилад для контролю макрогеометрії валів
Номер патенту: 59723
Опубліковано: 15.09.2003
Автори: Колот Лідія Петрівна, Павленко Олександр Володимирович
МПК: B23Q 15/007
Мітки: валів, макрогеометрії, контролю, прилад
Формула / Реферат:
Прилад для контролю макрогеометрії валів, що містить пневматичну скалку з центруючими поясками, сопла для підведення повітря та пристрій для реєстрації показників, який відрізняється тим, що містить три вимірювальні елементи, які не мають безпосереднього контакту з вимірюваною поверхнею, а встановлені відносно неї з регламентованим зазором.
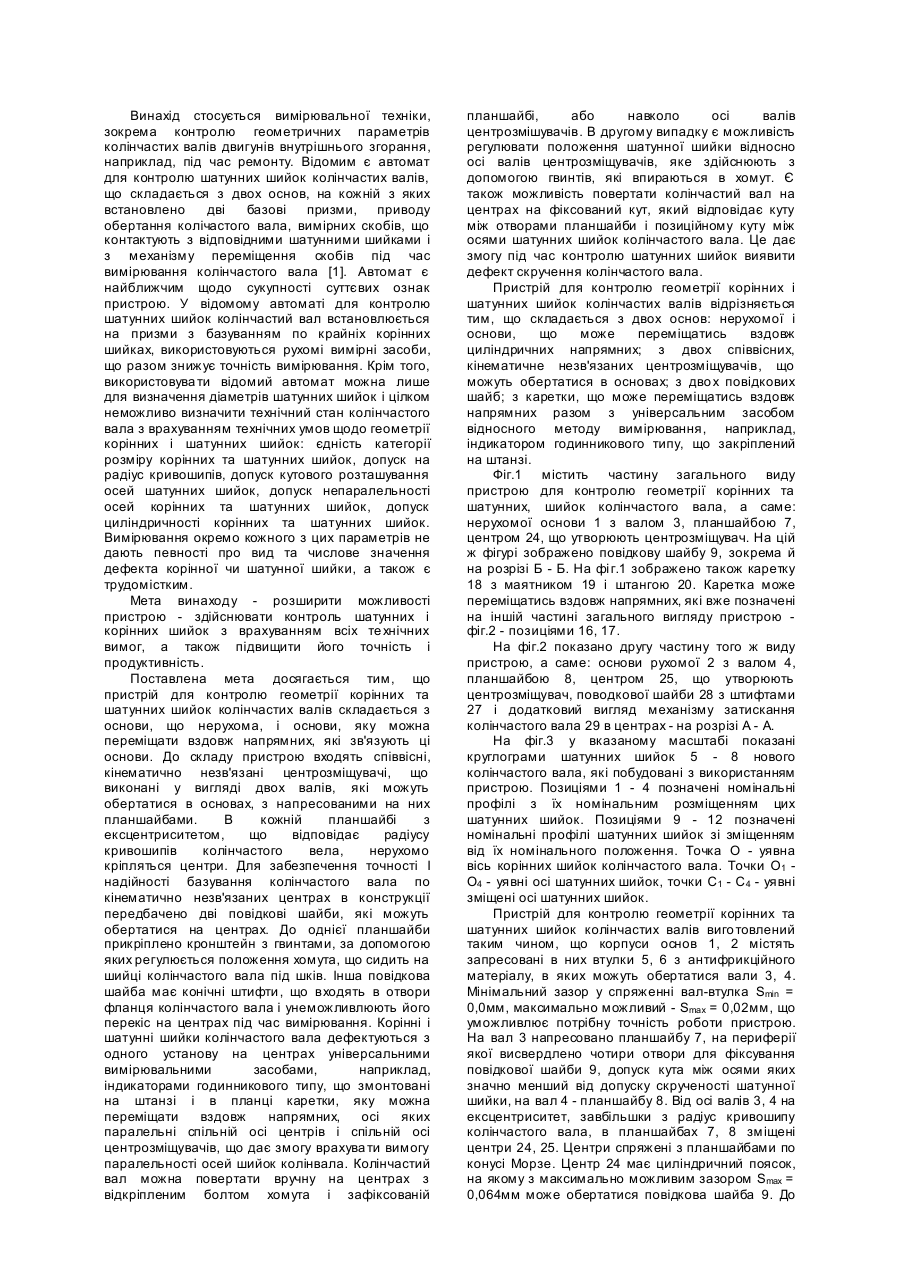
Пристрій для контролю геометрії корінних та шатунних шийок колінчастих валів
Номер патенту: 24232
Опубліковано: 07.07.1998
Автори: Сенчук Степан Романович, Семкович Олександр Дмитрович, Оліскевич Мирослав Степанович
МПК: G01B 5/08
Мітки: корінних, контролю, валів, геометрії, колінчастих, пристрій, шийок, шатунних
Формула / Реферат:
Пристрій для контролю геометрії корінних та шатунних шийок колінчастих валів, що складається з двох основ, вимірювального засобу і механізму його переміщення відносно відповідної шатунної шийки, який відрізняється тим, що пристрій складається з двох співвісних, кінематично незв'язаних центрозмішувачів, кожен з яких виконаний у вигляді вала з нерухомою на ньому планшайбою і нерухомим у ній центром; з двох поводкових шайб, які можуть обертатися...
Попередній патент: Спосіб пластики пупкової грижі
Наступний патент: Спосіб багатозондового нейтронного каротажу для визначення пористості і характеру насичення порід-колекторів та пристрій для його здійснення
Випадковий патент: Судно