Лазерна вимірювальна система з додатковими можливостями
Номер патенту: 64208
Опубліковано: 25.10.2011
Автори: Сачук Ігор Іванович, Хударковський Костянтин Ігорович, Альошин Геннадій Васильович, Рубан Ігор Вікторович, Осієвський Сергій Валерійович, Шостак Анатолій Васильович, Воробйов Руслан Володимирович, Костянець Олександр Васильович, Васильєв Дмитро Геннадійович, Коломійцев Олексій Володимирович
Формула / Реферат
Лазерна вимірювальна система з додатковими можливостями, яка містить приймач-передавач (ПРМ-ПРД), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності ![]() , радіальної швидкості
, радіальної швидкості ![]() , кутів азимута
, кутів азимута ![]() і місця
і місця ![]() , кутових швидкостей
, кутових швидкостей ![]() і
і ![]() , яка відрізняється тим, що після ПРМ-ПРД замість інформаційного блока введено блок з розширеними можливостями.
, яка відрізняється тим, що після ПРМ-ПРД замість інформаційного блока введено блок з розширеними можливостями.
Текст
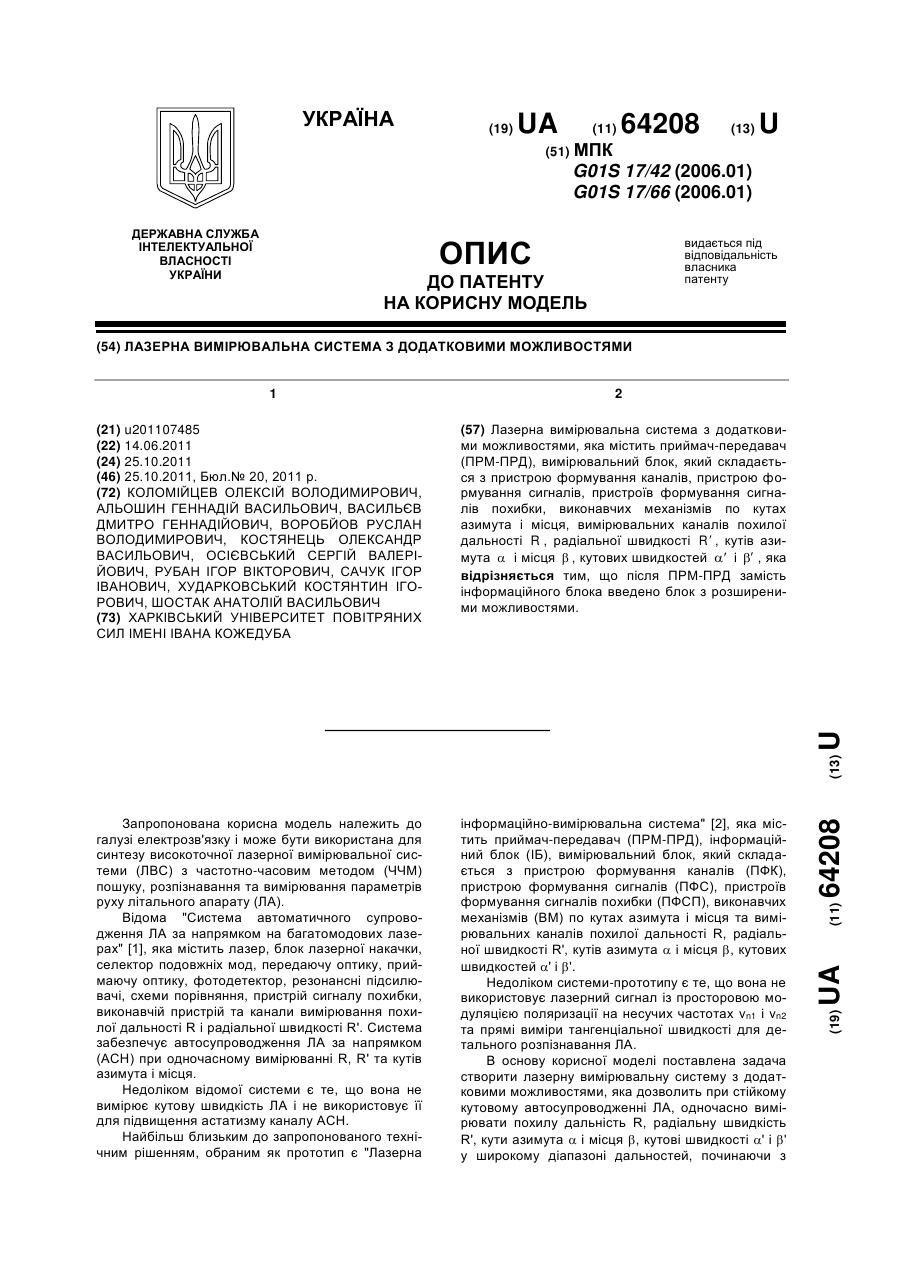
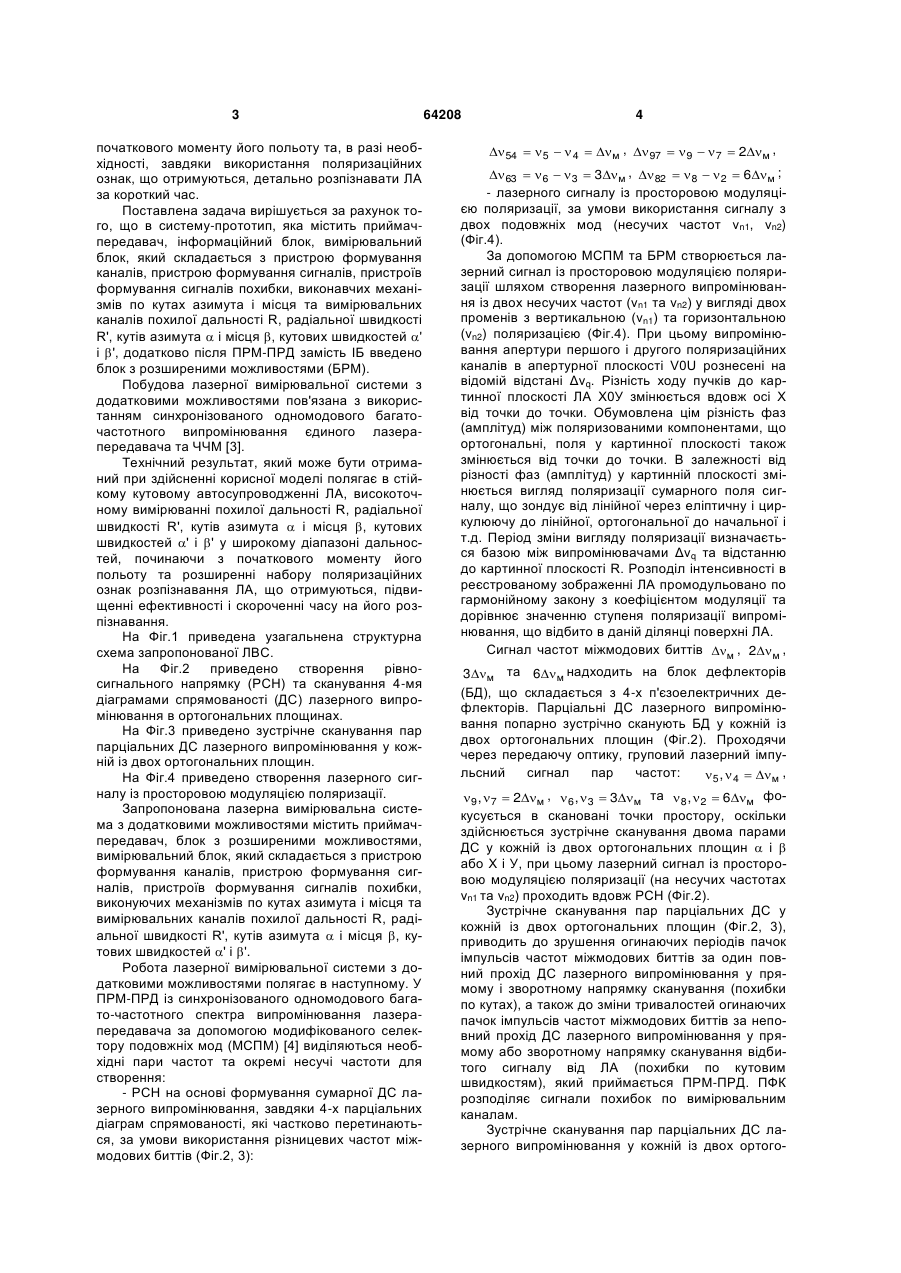
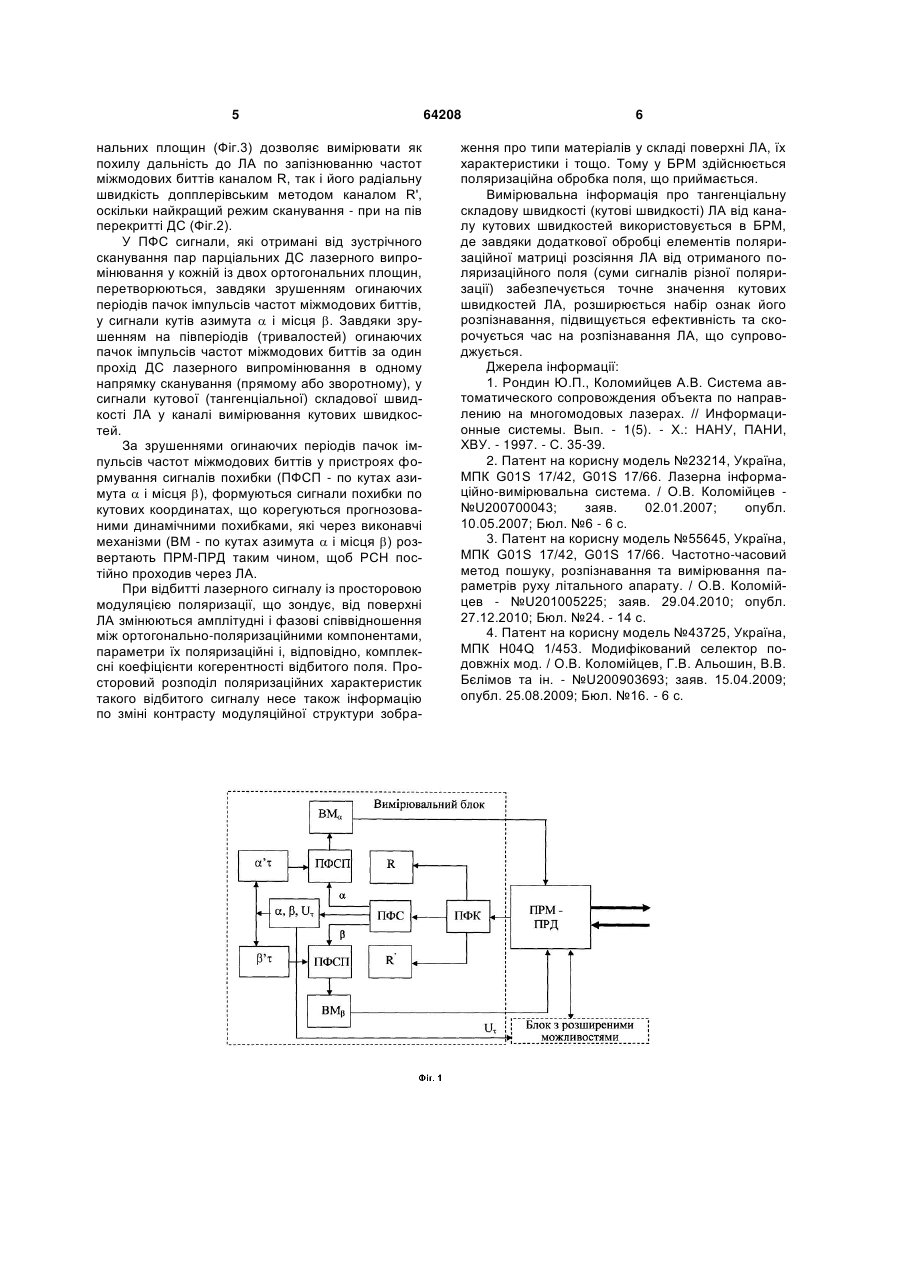
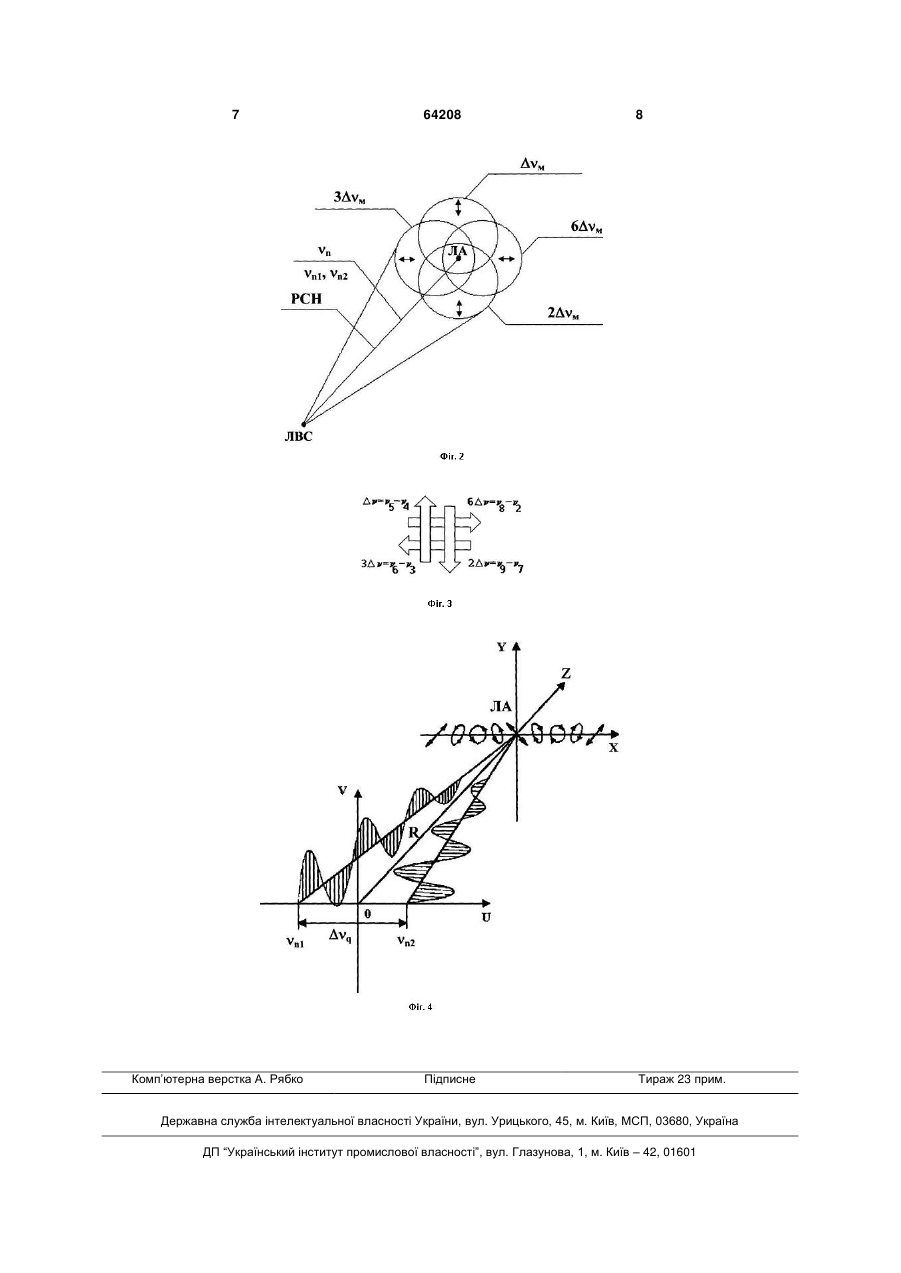
Лазерна вимірювальна система з додатковими можливостями, яка містить приймач-передавач (ПРМ-ПРД), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R , радіальної швидкості R , кутів азимута і місця , кутових швидкостей і , яка відрізняється тим, що після ПРМ-ПРД замість інформаційного блока введено блок з розширеними можливостями. Запропонована корисна модель належить до галузі електрозв'язку і може бути використана для синтезу високоточної лазерної вимірювальної системи (ЛВС) з частотно-часовим методом (ЧЧМ) пошуку, розпізнавання та вимірювання параметрів руху літального апарату (ЛА). Відома "Система автоматичного супроводження ЛА за напрямком на багатомодових лазерах" [1], яка містить лазер, блок лазерної накачки, селектор подовжніх мод, передаючу оптику, приймаючу оптику, фотодетектор, резонансні підсилювачі, схеми порівняння, пристрій сигналу похибки, виконавчій пристрій та канали вимірювання похилої дальності R і радіальної швидкості R'. Система забезпечує автосупроводження ЛА за напрямком (АСН) при одночасному вимірюванні R, R' та кутів азимута і місця. Недоліком відомої системи є те, що вона не вимірює кутову швидкість ЛА і не використовує її для підвищення астатизму каналу АСН. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є "Лазерна інформаційно-вимірювальна система" [2], яка містить приймач-передавач (ПРМ-ПРД), інформаційний блок (ІБ), вимірювальний блок, який складається з пристрою формування каналів (ПФК), пристрою формування сигналів (ПФС), пристроїв формування сигналів похибки (ПФСП), виконавчих механізмів (ВМ) по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута і місця , кутових швидкостей ' і '. Недоліком системи-прототипу є те, що вона не використовує лазерний сигнал із просторовою модуляцією поляризації на несучих частотах νn1 і νn2 та прямі виміри тангенціальної швидкості для детального розпізнавання ЛА. В основу корисної моделі поставлена задача створити лазерну вимірювальну систему з додатковими можливостями, яка дозволить при стійкому кутовому автосупроводженні ЛА, одночасно вимірювати похилу дальність R, радіальну швидкість R', кути азимута і місця , кутові швидкості ' і ' у широкому діапазоні дальностей, починаючи з (19) UA (11) 64208 (13) U (21) u201107485 (22) 14.06.2011 (24) 25.10.2011 (46) 25.10.2011, Бюл.№ 20, 2011 р. (72) КОЛОМІЙЦЕВ ОЛЕКСІЙ ВОЛОДИМИРОВИЧ, АЛЬОШИН ГЕННАДІЙ ВАСИЛЬОВИЧ, ВАСИЛЬЄВ ДМИТРО ГЕННАДІЙОВИЧ, ВОРОБЙОВ РУСЛАН ВОЛОДИМИРОВИЧ, КОСТЯНЕЦЬ ОЛЕКСАНДР ВАСИЛЬОВИЧ, ОСІЄВСЬКИЙ СЕРГІЙ ВАЛЕРІЙОВИЧ, РУБАН ІГОР ВІКТОРОВИЧ, САЧУК ІГОР ІВАНОВИЧ, ХУДАРКОВСЬКИЙ КОСТЯНТИН ІГОРОВИЧ, ШОСТАК АНАТОЛІЙ ВАСИЛЬОВИЧ (73) ХАРКІВСЬКИЙ УНІВЕРСИТЕТ ПОВІТРЯНИХ СИЛ ІМЕНІ ІВАНА КОЖЕДУБА 3 початкового моменту його польоту та, в разі необхідності, завдяки використання поляризаційних ознак, що отримуються, детально розпізнавати ЛА за короткий час. Поставлена задача вирішується за рахунок того, що в систему-прототип, яка містить приймачпередавач, інформаційний блок, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута і місця , кутових швидкостей ' і ', додатково після ПРМ-ПРД замість ІБ введено блок з розширеними можливостями (БРМ). Побудова лазерної вимірювальної системи з додатковими можливостями пов'язана з використанням синхронізованого одномодового багаточастотного випромінювання єдиного лазерапередавача та ЧЧМ [3]. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає в стійкому кутовому автосупроводженні ЛА, високоточному вимірюванні похилої дальності R, радіальної швидкості R', кутів азимута і місця , кутових швидкостей ' і ' у широкому діапазоні дальностей, починаючи з початкового моменту його польоту та розширенні набору поляризаційних ознак розпізнавання ЛА, що отримуються, підвищенні ефективності і скороченні часу на його розпізнавання. На Фіг.1 приведена узагальнена структурна схема запропонованої ЛВС. На Фіг.2 приведено створення рівносигнального напрямку (РСН) та сканування 4-мя діаграмами спрямованості (ДС) лазерного випромінювання в ортогональних площинах. На Фіг.3 приведено зустрічне сканування пар парціальних ДС лазерного випромінювання у кожній із двох ортогональних площин. На Фіг.4 приведено створення лазерного сигналу із просторовою модуляцією поляризації. Запропонована лазерна вимірювальна система з додатковими можливостями містить приймачпередавач, блок з розширеними можливостями, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконуючих механізмів по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута і місця , кутових швидкостей ' і '. Робота лазерної вимірювальної системи з додатковими можливостями полягає в наступному. У ПРМ-ПРД із синхронізованого одномодового багато-частотного спектра випромінювання лазерапередавача за допомогою модифікованого селектору подовжніх мод (МСПМ) [4] виділяються необхідні пари частот та окремі несучі частоти для створення: - РСН на основі формування сумарної ДС лазерного випромінювання, завдяки 4-х парціальних діаграм спрямованості, які частково перетинаються, за умови використання різницевих частот міжмодових биттів (Фіг.2, 3): 64208 4 54 5 4 м , 97 9 7 2м , 63 6 3 3м , 82 8 2 6м ; - лазерного сигналу із просторовою модуляцією поляризації, за умови використання сигналу з двох подовжніх мод (несучих частот νn1, νn2) (Фіг.4). За допомогою МСПМ та БРМ створюється лазерний сигнал із просторовою модуляцією поляризації шляхом створення лазерного випромінювання із двох несучих частот (νn1 та νn2) у вигляді двох променів з вертикальною (νn1) та горизонтальною (νn2) поляризацією (Фіг.4). При цьому випромінювання апертури першого і другого поляризаційних каналів в апертурної плоскості V0U рознесені на відомій відстані Δνq. Різність ходу пучків до картинної плоскості ЛА Х0У змінюється вдовж осі X від точки до точки. Обумовлена цім різність фаз (амплітуд) між поляризованими компонентами, що ортогональні, поля у картинної плоскості також змінюється від точки до точки. В залежності від різності фаз (амплітуд) у картинній плоскості змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної до начальної і т.д. Період зміни вигляду поляризації визначається базою між випромінювачами Δνq та відстанню до картинної плоскості R. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції та дорівнює значенню ступеня поляризації випромінювання, що відбито в даній ділянці поверхні ЛА. Сигнал частот міжмодових биттів м , 2м , 3м та 6м надходить на блок дефлекторів (БД), що складається з 4-х п'єзоелектричних дефлекторів. Парціальні ДС лазерного випромінювання попарно зустрічно сканують БД у кожній із двох ортогональних площин (Фіг.2). Проходячи через передаючу оптику, груповий лазерний імпульсний сигнал пар частот: 5 , 4 м , 9 , 7 2м , 6 , 3 3м та 8 , 2 6м фокусується в скановані точки простору, оскільки здійснюється зустрічне сканування двома парами ДС у кожній із двох ортогональних площин і або X і У, при цьому лазерний сигнал із просторовою модуляцією поляризації (на несучих частотах νn1 та νn2) проходить вдовж РСН (Фіг.2). Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин (Фіг.2, 3), приводить до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС лазерного випромінювання у прямому і зворотному напрямку сканування (похибки по кутах), а також до зміни тривалостей огинаючих пачок імпульсів частот міжмодових биттів за неповний прохід ДС лазерного випромінювання у прямому або зворотному напрямку сканування відбитого сигналу від ЛА (похибки по кутовим швидкостям), який приймається ПРМ-ПРД. ПФК розподіляє сигнали похибок по вимірювальним каналам. Зустрічне сканування пар парціальних ДС лазерного випромінювання у кожній із двох ортого 5 нальних площин (Фіг.3) дозволяє вимірювати як похилу дальність до ЛА по запізнюванню частот міжмодових биттів каналом R, так і його радіальну швидкість допплерівським методом каналом R', оскільки найкращий режим сканування - при на пів перекритті ДС (Фіг.2). У ПФС сигнали, які отримані від зустрічного сканування пар парціальних ДС лазерного випромінювання у кожній із двох ортогональних площин, перетворюються, завдяки зрушенням огинаючих періодів пачок імпульсів частот міжмодових биттів, у сигнали кутів азимута і місця . Завдяки зрушенням на півперіодів (тривалостей) огинаючих пачок імпульсів частот міжмодових биттів за один прохід ДС лазерного випромінювання в одному напрямку сканування (прямому або зворотному), у сигнали кутової (тангенціальної) складової швидкості ЛА у каналі вимірювання кутових швидкостей. За зрушеннями огинаючих періодів пачок імпульсів частот міжмодових биттів у пристроях формування сигналів похибки (ПФСП - по кутах азимута і місця ), формуються сигнали похибки по кутових координатах, що корегуються прогнозованими динамічними похибками, які через виконавчі механізми (ВМ - по кутах азимута і місця ) розвертають ПРМ-ПРД таким чином, щоб РСН постійно проходив через ЛА. При відбитті лазерного сигналу із просторовою модуляцією поляризації, що зондує, від поверхні ЛА змінюються амплітудні і фазові співвідношення між ортогонально-поляризаційними компонентами, параметри їх поляризаційні і, відповідно, комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу несе також інформацію по зміні контрасту модуляційної структури зобра 64208 6 ження про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо. Тому у БРМ здійснюється поляризаційна обробка поля, що приймається. Вимірювальна інформація про тангенціальну складову швидкості (кутові швидкості) ЛА від каналу кутових швидкостей використовується в БРМ, де завдяки додаткової обробці елементів поляризаційної матриці розсіяння ЛА від отриманого поляризаційного поля (суми сигналів різної поляризації) забезпечується точне значення кутових швидкостей ЛА, розширюється набір ознак його розпізнавання, підвищується ефективність та скорочується час на розпізнавання ЛА, що супроводжується. Джерела інформації: 1. Рондин Ю.П., Коломийцев А.В. Система автоматического сопровождения объекта по направлению на многомодовых лазерах. // Информационные системы. Вып. - 1(5). - X.: НАНУ, ПАНИ, ХВУ. - 1997. - С. 35-39. 2. Патент на корисну модель №23214, Україна, МПК G01S 17/42, G01S 17/66. Лазерна інформаційно-вимірювальна система. / О.В. Коломійцев №U200700043; заяв. 02.01.2007; опубл. 10.05.2007; Бюл. №6 - 6 с. 3. Патент на корисну модель №55645, Україна, МПК G01S 17/42, G01S 17/66. Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарату. / О.В. Коломійцев - №U201005225; заяв. 29.04.2010; опубл. 27.12.2010; Бюл. №24. - 14 с. 4. Патент на корисну модель №43725, Україна, МПК Н04Q 1/453. Модифікований селектор подовжніх мод. / О.В. Коломійцев, Г.В. Альошин, В.В. Бєлімов та ін. - №U200903693; заяв. 15.04.2009; опубл. 25.08.2009; Бюл. №16. - 6 с. 7 Комп’ютерна верстка А. Рябко 64208 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLaser measuring system with additional capabilities
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Alioshyn Hennadii Vasyliovych, Vasyliev Dmytro Hennadiiovych, Vorobiov Ruslan Volodymyrovych, Kostianets Oleksandr Vasyliovych, Osievskyi Serhii Valeriiovych, Ruban Ihor Viktorovych, Sachuk Ihor Ivanovych, Khudarkovskyi Kostiantyn Ihorovych, Shostak Anatolii Vasyliovych
Назва патенту російськоюЛазерная измерительная система с дополнительными возможностями
Автори російськоюКоломийцев Алексей Владимирович, Алешин Геннадий Васильевич, Васильев Дмитрий Геннадьевич, Воробьев Руслан Владимирович, Костянец Александр Васильевич, Осиевский Сергей Валериевич, Рубан Игорь Викторович, Сачук Игорь Иванович, Хударковский Константин Игоревич, Шостак Анатолий Васильевич
МПК / Мітки
МПК: G01S 17/66, G01S 17/42
Мітки: система, вимірювальна, додатковими, лазерна, можливостями
Код посилання
<a href="https://ua.patents.su/4-64208-lazerna-vimiryuvalna-sistema-z-dodatkovimi-mozhlivostyami.html" target="_blank" rel="follow" title="База патентів України">Лазерна вимірювальна система з додатковими можливостями</a>
Лазерна інформаційно-вимірювальна система з додатковими можливостями
Номер патенту: 62833
Опубліковано: 12.09.2011
Автори: Хударковський Костянтин Ігорович, Рубан Ігор Вікторович, Луковський Олег Ярославович, Васильєв Дмитро Геннадійович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Красношапка Ігор Валерійович, Осієвський Сергій Валерійович, Сачук Ігор Іванович, Дзігора Олександр Михайлович
МПК: G01S 17/66, G01S 17/42
Мітки: лазерна, інформаційно-вимірювальна, можливостями, система, додатковими
Формула / Реферат:
Лазерна інформаційно-вимірювальна система з додатковими можливостями, яка містить приймач-передавач (ПРМ-ПРД), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута a і місця b та кутових швидкостей a' і b', яка відрізняється тим,...
Лазерна вимірювальна система з розширеними можливостями
Номер патенту: 62843
Опубліковано: 12.09.2011
Автори: Таршин Володимир Анатолійович, Васильєв Дмитро Геннадійович, Рубан Ігор Вікторович, Хударковський Костянтин Ігорович, Коломійцев Олексій Володимирович, Сачук Ігор Іванович, Воробйов Руслан Володимирович, Альошин Геннадій Васильович, Ковальчук Андрій Олексійович, Осієвський Сергій Валерійович
МПК: G01S 17/42, G01S 17/66
Мітки: розширеними, вимірювальна, система, можливостями, лазерна
Формула / Реферат:
Лазерна вимірювальна система з розширеними можливостями, яка містить вимірювальний блок (ВБ), який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', яка відрізняється тим, що перед ВБ...
Лазерна інформаційно-вимірювальна система з розширеними можливостями
Номер патенту: 62832
Опубліковано: 12.09.2011
Автори: Борисенко Олександр Васильович, Коломійцев Олексій Володимирович, Хударковський Костянтин Ігорович, Очкуренко Олександр Вікторович, Альошин Геннадій Васильович, Рубан Ігор Вікторович, Максюта Дмитро Вікторович, Сачук Ігор Іванович, Васильєв Дмитро Геннадійович, Осієвський Сергій Валерійович
МПК: G01S 17/42, G01S 17/66
Мітки: лазерна, система, інформаційно-вимірювальна, розширеними, можливостями
Формула / Реферат:
Лазерна інформаційно-вимірювальна система з розширеними можливостями, яка містить приймально-передавальну апаратуру (ПРМ-ПРД А), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β, кутових швидкостей α'...
Лазерна вимірювальна система з можливістю пошуку та розпізнавання ла
Номер патенту: 60306
Опубліковано: 10.06.2011
Автори: Приходько Володимир Мусійович, Закіров Сергій Вікторович, Сачук Ігор Іванович, Альошин Геннадій Васильович, Жилін Євген Ігорович, Коломійцев Олексій Володимирович, Бєлімов Володимир Васильович, Васильєв Дмитро Геннадійович, Хударковський Костянтин Ігорович, Стаднік Володимир Василійович
МПК: G01S 17/42, G01S 17/66
Мітки: вимірювальна, система, можливістю, розпізнавання, лазерна, пошуку
Формула / Реферат:
Лазерна вимірювальна система з можливістю пошуку та розпізнавання ЛА, що містить вимірювальний блок (ВМ), який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута і місця
Лазерна вимірювальна система з можливістю розпізнавання літального апарата (ла)
Номер патенту: 55882
Опубліковано: 27.12.2010
Автори: Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Ольховіков Станіслав Валерійович, Злотніков Андрій Львович, Сачук Ігор Іванович, Воробйов Руслан Володимирович, Приходько Дмитро Петрович, Кужель Ігор Євгенійович, Клівець Сергій Іванович, Васильєв Дмитро Геннадійович
МПК: G01S 17/66
Мітки: ла, літального, апарата, система, розпізнавання, лазерна, можливістю, вимірювальна
Формула / Реферат:
Лазерна вимірювальна система з можливістю розпізнавання літального апарата (ЛА), що містить приймач-передавач (ПРМ-ПРД), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута a і місця β, кутових швидкостей a' і β', яка...
Попередній патент: Спосіб вибухової обробки матеріалів
Наступний патент: Пристрій для захисту дизелів армійських машин від розморожування
Випадковий патент: Регульований шестиланковий шарнірно-важільний механізм поступального переміщення об'єкта