Регульований шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 87316
Опубліковано: 10.02.2014
Автори: Арабаджи Олена Дмитрівна, Амбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович

Формула / Реферат
Шестиланковий важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзунного механізму, повзун, додатковий шатун, циліндричні пальці, який відрізняється тим, що на циліндричному пальці шарнірного з'єднання шатуна кривошипно-повзунного механізму і повзуна рухливо і співісно з пальцем встановлено черв'ячне колесо, зачеплене з черв'яком, рухливо встановленим на підставі, жорстко закріпленій з шатуном кривошипно-повзунного механізму, і співісно сполученим з валом регулюючого електродвигуна, на черв'ячному колесі, на відстані, рівній довжині додаткового шатуна, нерухомо встановлений співісно з черв'ячним колесом циліндричний палець, з яким шарнірно сполучений об'єкт.
Текст
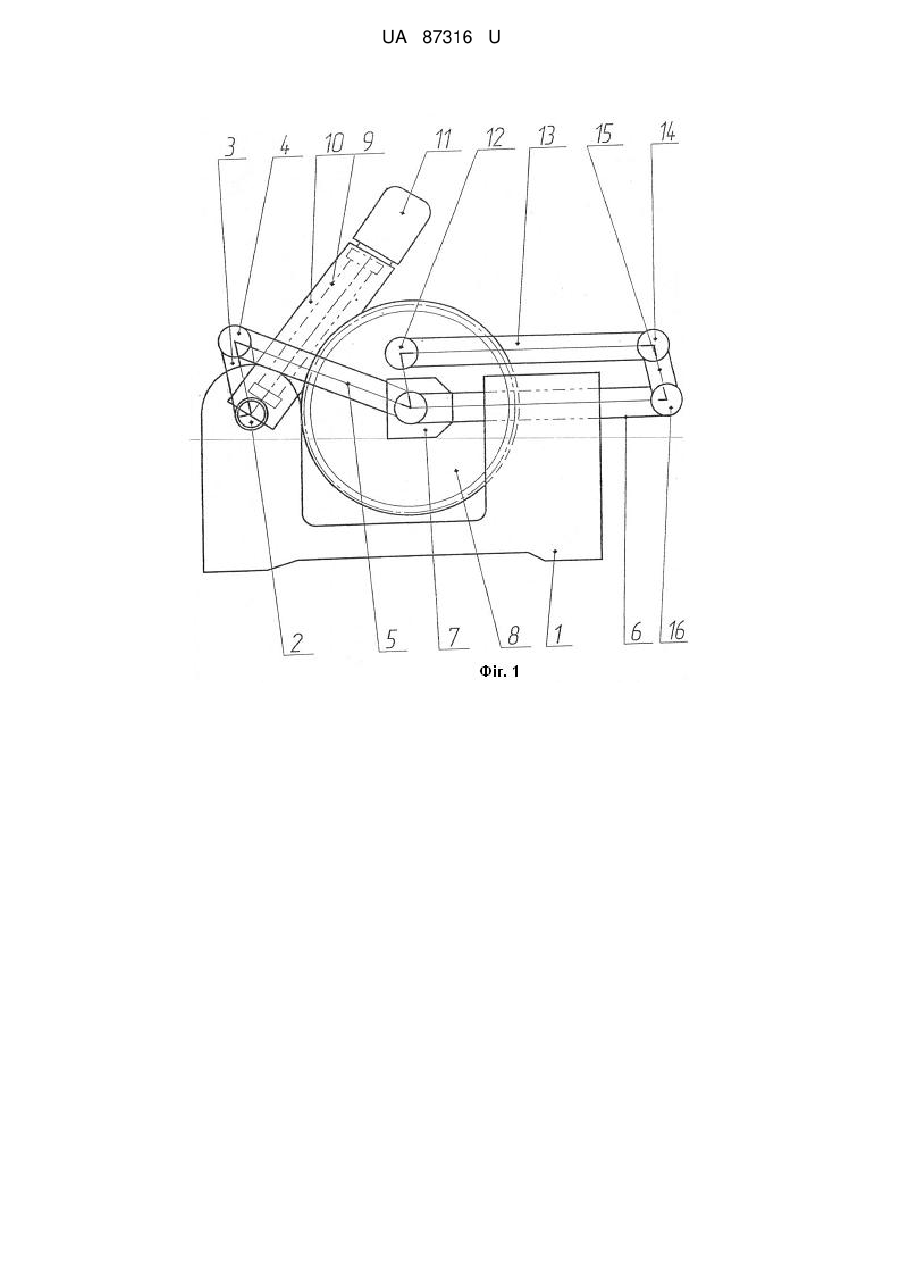
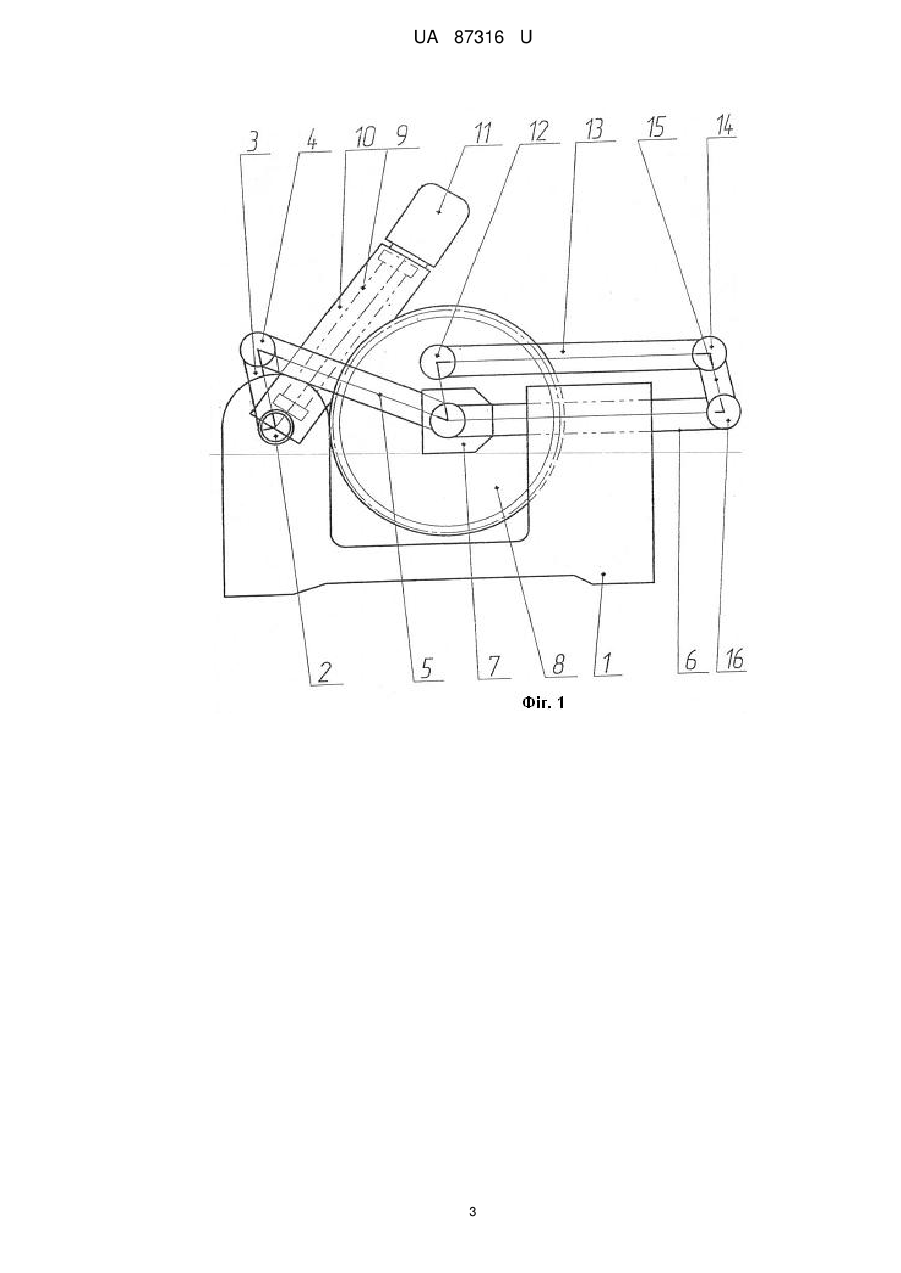
Реферат: UA 87316 U UA 87316 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме до механізмів для поступального переміщення об'єкта по шатуновим кривим, які використовуються в крокуючих механізмах, в захватних пристроях роботів і маніпуляторів, в пристосуваннях для металоріжучих верстатів, машин ливарного виробництва, в машинах-автоматах харчової, легкої промисловості та ін. Відомі важільні і зубчасто-важільні механізми, в яких об'єкт, жорстко сполучений з одним із шатунів механізму, відтворює задане поступальне переміщення по складній траєкторії (див., наприклад, Р.В. Амбарцумянц. Зубчато-рычажный механизм для воспроизведения плоскопараллельного движения объекта. Сб. Теория механизмов и машин. – Харьков, 1979. №26). Проте, в цих механізмах поступальне переміщення об'єкта здійснюється лише на деякій ділянці кута повороту вхідної ланки. В них переміщати об'єкт поступально по шатунній кривій абсолютно точно за повний зворот вхідної ланки неможливо. Відомо конструкція шестиланкового важільного механізму (див. Ю.Л. Саркисян. О воспроизведении поступательного движения звена по траекториям исходных четырехзвенником. // Машиноведение. - М., 1965. - Вып. 5. - С. 33, рис. 2а), в якому шатун утворює одну поступальну і дві обертальні (шарнірні) пари з іншими ланками механізму, здійснює поступальне переміщення по шатунній кривій, описуваною точкою М шарнірного чотириланковика (див. там же мал. 1а, с. 32). Проте, як і в першому прикладі, так і в другому об'єкт переміщується лише по одній заданій траєкторії, хоча дуже часто в промисловості потрібно швидко змінювати цю траєкторію, особливо в крокуючих машинах залежно від характеру місцевості. Найбільш близьким технічним рішенням є шестиланковий важільний механізм (див. Р.В. Амбарцумянц, К.Р. Амбарцумянц. Шістиланковій шарнірно-важільній механізм поступального переміщення об'єкта. Патент Україні на корісну модель №32393 Бюл. № 9, 2008р.). У механізмі об'єкт, траєкторія якого відтворюється, одним кінцем шарнірно сполучений з шатуном кривошипно-повзунного механізму, який у свою чергу шарнірно сполучений з повзуном, а іншим кінцем об'єкт шарнірно сполучений з додатковим шатуном, утворюючим шарнірне з'єднання з повзуном кривошипно-повзунного механізму. Контур, утворений частиною шатуна кривошипно-повзунного механізму, об'єкт, додатковий шатун і повзун кривошипноповзунного механізму утворюють шарнірний паралелограм. Прототип і корисна модель, що пропонується, мають наступні загальні ознаки: корпус, ведучий вал, кривошип, шатун кривошипно-повзунного механізму, повзун, циліндричні пальці, додатковий шатун Головний недолік шестиланкового важільного механізму поступального переміщення об'єкту є неможливість змінити траєкторію руху об'єкта як в статичному стані, так і в динамічному. У основу корисної моделі поставлено задачу розробити конструкції механізму, в якому за рахунок зміни елементів конструкції досягають розширення його функціональних можливостей, а саме змінювати траєкторію рухомого об'єкту як при русі механізму, так і в його статичному стані. Поставлена задача вирішена в конструкції шестиланкового важільного механізму поступального переміщення об'єкта, який містить корпус, ведучий вал, шатун кривошипношатунового механізму, повзун, об'єкт, додатковий шатун, циліндрові пальці тим, що на циліндричному пальці шарнірного з'єднання шатуна кривошипно-повзунного механізму і повзуна рухливо і співісно з пальцем встановлено черв'ячне колесо, зачеплене з черв'яком, рухливо встановленим на підставі, жорстко закріпленій з шатуном кривошипно-повзунного механізму, і сполученим співвісно з валом регулюючого електродвигуна, на черв'ячному колесі, на відстані, рівній довжині додаткового шатуна, нерухомо встановлений співвісно з черв'ячним колесом циліндричний палець, з яким шарнірно сполучений об'єкт. Такого виконання конструкції шестиланкового важільного механізму дозволяє розширити його функціональні можливості, а саме, змінити траєкторію поступального переміщення об'єкта по різних шатунових кривих як в русі механізму, так і в його статичному стані. Конструкція механізму представлена на кресленні де: Фіг. 1 - фронтальний вид. Фіг. 2 переріз А-А по фіг.1. Регульований шестиланковий шарнірно важільний механізм складається з корпусу 1. У корпусі 1 встановлений провідний вал 2. На валу 2 за допомогою шпонки встановлений 1 UA 87316 U 5 10 15 20 25 кривошип 3. Кривошип 3 шарнірно сполучений з шатуном 5 за допомогою пальця 4. Шатун 5 у свою чергу з'єднаний з повзуном 6 за допомогою пальця 7. На пальці 7 рухливо встановлено черв'ячне колесо 8. Черв'ячне колесо 8 зачеплено з черв'яком 9. Черв'як 9 рухливо встановлений на підставі 10, жорстко закріпленій з шатуном 5. Черв'як 9 сполучений співвісно з валом ротора регулюючого електродвигуна 11. На черв'ячному колесі 8 нерухомо встановлений палець 12 з подовжньою віссю, паралельній осі обертання черв'ячного колеса 8. Палець 12 одним кінцем шарнірно сполучений з об'єктом 13. Іншим кінцем об'єкт 13, за допомогою пальця 14, шарнірно сполучений з додатковим шатуном 15. Додатковий шатун 15, шарнірно сполучений з пальцем 16, нерухомо встановлений в повзун 6. Відстань між подовжніми осями пальців 7-12 і 14-16 строго однакові. Строго однакові також відстань між подовжніми осями пальців 12-14 і 716. Шестиланковий шарнірно-важільний механізм працює в двох режимах: режим роботи, режим регулювання. 1. Режим роботи. Обертання від зовнішнього джерела (не показаний на фіг.) передається ведучому валу 2. Від ведучого вала 2 через шпонку обертання передається кривошипу 3. Від кривошипа 3 рух через шатун 5 передається повзуну 6. Черв'ячне колесо 8, черв'як 9 і шатун 5 не мають відносного руху і здійснюють складний плоско-паралельний рух, внаслідок чого центральна вісь пальця 12 переміщується по поверхні, профіль, якої описується шатунною кривою. Центральна вісь пальця 14 рухається по такій же кривій, що і подовжня вісь пальця 12, оскільки прямі лінії, з'єднуючі геометричні центри циліндрових пальців 7, 12, 14, 16 утворюють контур шарнірного паралелограма, отже всі точки об'єкта 13 рухаються по траєкторії, ідентичній траєкторії центрів циліндрових пальців 12 і 14, отже, об'єкт в цілому. 2. Режим регулювання. Імпульс регулювання передається до регулюючого електродвигуна 11. Обертання електродвигуна передається до черв'яка 9. Від черв'яка 9 обертання передається до черв'ячного колеса 8 і воно обертається в одну або в іншу сторону залежно від напряму обертання черв'яка 9. Обертання черв'ячного колеса 8 змінює положення подовжньої осі пальця 12 відносно подовжньої осі пальця 7, що приводить до зміни вигляду траєкторії подовжньої осі пальця 12, отже, траєкторії поступального переміщення об'єкта 13. Регулювання здійснюється як при русі механізму, так і при його статичному стані. 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Шестиланковий важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзунного механізму, повзун, додатковий шатун, циліндричні пальці, який відрізняється тим, що на циліндричному пальці шарнірного з'єднання шатуна кривошипно-повзунного механізму і повзуна рухливо і співісно з пальцем встановлено черв'ячне колесо, зачеплене з черв'яком, рухливо встановленим на підставі, жорстко закріпленій з шатуном кривошипно-повзунного механізму, і співісно сполученим з валом регулюючого електродвигуна, на черв'ячному колесі, на відстані, рівній довжині додаткового шатуна, нерухомо встановлений співісно з черв'ячним колесом циліндричний палець, з яким шарнірно сполучений об'єкт. 2 UA 87316 U 3 UA 87316 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюAmbartsumiants Robert Vachahanovych, Ambartsumiants Karen Robertovych
Автори російськоюАмбарцумянц Роберт Вачаганович, Амбарцумянц Карен Робертович
МПК / Мітки
МПК: F16H 21/00
Мітки: поступального, переміщення, регульованій, механізм, об'єкта, шарнірно-важільний, шестиланковий
Код посилання
<a href="https://ua.patents.su/6-87316-regulovanijj-shestilankovijj-sharnirno-vazhilnijj-mekhanizm-postupalnogo-peremishhennya-obehkta.html" target="_blank" rel="follow" title="База патентів України">Регульований шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта</a>
Шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 32393
Опубліковано: 12.05.2008
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: шестиланковий, шарнірно-важільний, переміщення, об'єкта, поступального, механізм
Формула / Реферат:
Шестиланковий шарнірно-важільний механізм поступального переміщення об'єкта, що містить кривошип, шатуни, повзуни, об'єкт, що утворює шарнірні з'єднання з шатунами і поступальною парою з повзуном, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний з шатуном кривошипно-повзунного механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з повзуном, а лінії, що з'єднують центри шарнірів об'єкта...
Зубчасто-важільний механізм поступального переміщення об’єкта

Номер патенту: 38996
Опубліковано: 26.01.2009
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: переміщення, об'єкта, поступального, механізм, зубчасто-важільний
Формула / Реферат:
Зубчасто-важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатуни, об'єкт, що утворює шарнірні з'єднання із шатунами, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний із шатуном кривошипно-коромислового механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з важелем, жорстко закріпленим з зубчастим колесом, встановленим на вал шарнірного...
Регульований двоколісний зубчасто-важільний механізм
Номер патенту: 28676
Опубліковано: 25.12.2007
Автори: Амбарцумянц Роберт Вачаганович, Тутаєв Сергій Валерійович
МПК: F16H 29/00
Мітки: регульованій, зубчасто-важільний, двоколісний, механізм
Формула / Реферат:
Двоколісний зубчасто-важільний механізм, що містить ведучий та вихідний вали, сателіт, центральне колесо, водило, шатун, коромисло, який відрізняється тим, що на сателіті встановлена вилка, в якій рухливо встановлений гвинт із роликом на кінці, на гвинті встановлений повзун, що утворює із гвинтом гвинтову пару, і водночас рухливо з’єднаний з шатуном, повзун разом з вилкою перебуває усередині У-подібного корпусу, який встановлено на штоці,...
Регульований механізм поступального переміщення
Номер патенту: 32190
Опубліковано: 12.05.2008
Автори: Амбарцумянц Роберт Вачаганович, Амбарцумянц Рубен Робертович, Олісеєнко Юрій Володимирович
МПК: F16H 29/00
Мітки: регульованій, механізм, поступального, переміщення
Формула / Реферат:
Регульований механізм поступального руху, що містить нерухоме центральне колесо, сателіт, вал з водилом, шток та повзун, який відрізняється тим, що центральне колесо виконане у вигляді черв'ячного колеса, яке встановлене у корпусі механізму з можливістю руху, також конструкція додатково містить зчеплений з черв'ячним колесом самогальмуючий черв'як, який одним кінцем встановлений з можливістю руху в корпусі, а іншим кінцем у кронштейні,...
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки
Номер патенту: 53876
Опубліковано: 17.02.2003
Автори: Харжевський В'ячеслав Олександрович, Кіницький Ярослав Тимофійович, Свєтловський Олександр Борисович
МПК: F16H 21/00
Мітки: регульованою, механізм, вихідної, тривалістю, ланки, зупинки, шарнірно-важільний
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідної ланки, що має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з шатуном, який шарнірно зв'язаний з повзуном, який відрізняється тим, що відстань між осями шарнірів і довжина кривошипа регульовані.