Вимірювач повітряного тиску
Номер патенту: 65816
Опубліковано: 12.12.2011
Автори: Давиденко Сергій Олександрович, Ганін Евген Сергійович, Постніков Володимир Миколайович, Пак Лідія Олександрівна

Формула / Реферат
Вимірювач повітряного тиску, що містить закріплений на корпусі літального апарата приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, який відрізняється тим, що в нього введені двовісний гіроскопічний стабілізатор, двовісний кардановий підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на внутрішній рамі двовісного карданового підвісу закріплений приймач повітряного тиску, на кожній осі двовісного карданового підвісу розміщені по два датчики кута, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні сигнали на осях підвісу флюгерних датчиків, компаратор та перетворювач-підсилювач каналу кута атаки, компаратор та перетворювач-підсилювач каналу кута ковзання, блок формування вихідних електричних сигналів для кута атаки та кута ковзання, причому скоба платформи і рама двовісного гіроскопічного стабілізатора механічно зв'язані за допомогою восьми шарнірів та чотирьох жорстких тяг зі скобою внутрішньої рами та зовнішньою рамою відповідно двовісного карданового підвісу, виходи перетворювача кута атаки в електричний сигнал та першого датчика кута на осі підвісу зовнішньої рами з'єднані з входом компаратора каналу кута атаки, вихід якого з'єднаний з входом перетворювача-підсилювача каналу кута атаки, вихід якого з'єднаний з входом датчика моменту другого двоступеневого гіроскопа гіроскопічного стабілізатора, виходи перетворювача кута ковзання в електричний сигнал та першого датчика кута на осі підвісу скоби внутрішньої рами карданового підвісу приймача повітряного тиску з'єднані з входом компаратора каналу кута ковзання, вихід якого з'єднаний з входом перетворювача-підсилювача каналу кута ковзання, вихід якого з'єднаний з входом датчика моменту першого двоступеневого гіроскопа гіроскопічного стабілізатора, виходи гіроскопа гіроскопічного стабілізатора, виходи другого датчика кута на осі підвісу внутрішньої рами та другого датчика кута на осі підвісу зовнішньої рами карданового підвісу вимірювача повітряного тиску з'єднані з входами блока формування вихідних електричних сигналів для кута атаки та кута ковзання.
Текст
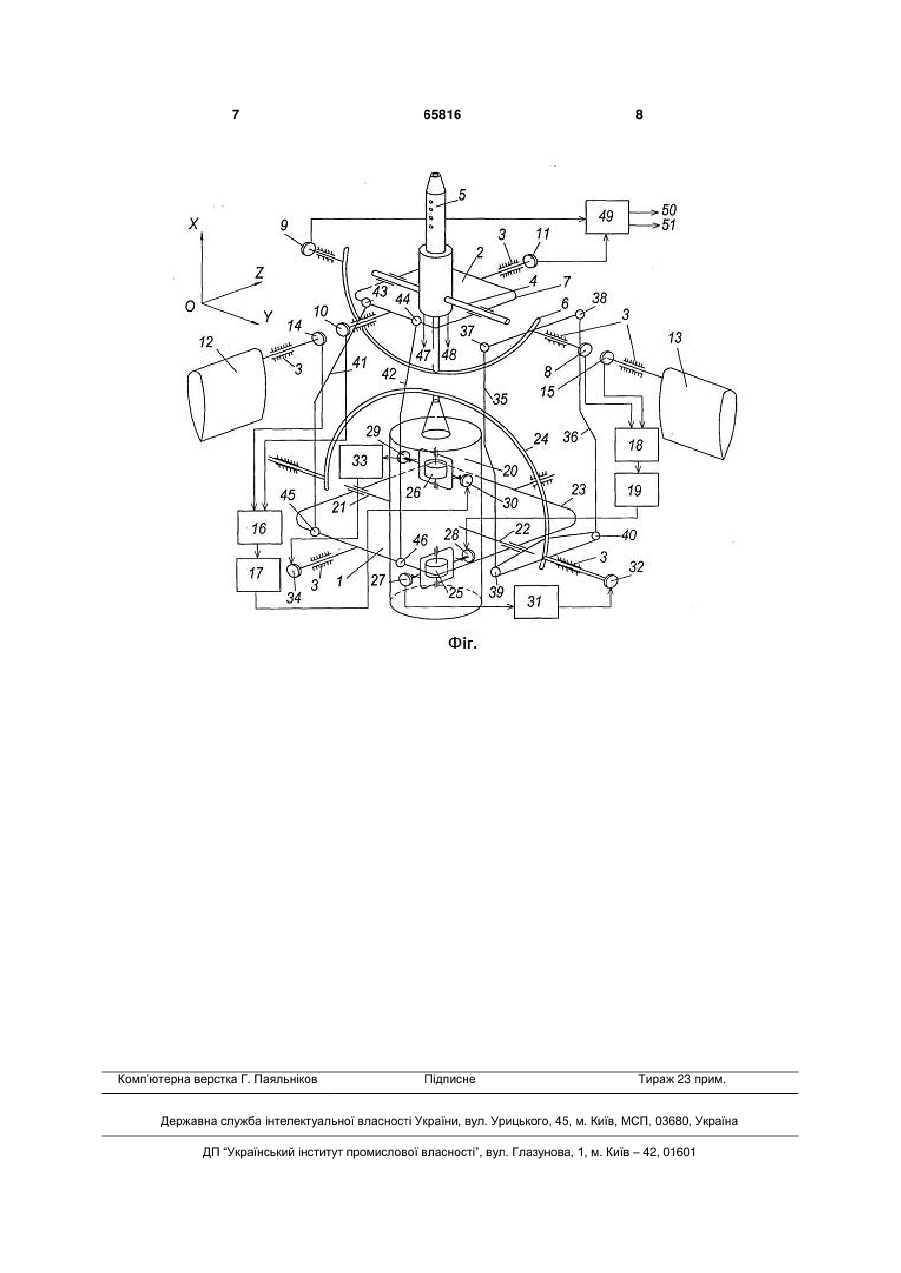
Вимірювач повітряного тиску, що містить закріплений на корпусі літального апарата приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, який відрізняється тим, що в нього введені двовісний гіроскопічний стабілізатор, двовісний кардановий підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на внутрішній рамі двовісного карданового підвісу закріплений приймач повітряного тиску, на кожній осі двовісного карданового підвісу розміщені по два датчики кута, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні сигнали на осях підвісу флюгерних датчиків, компаратор та перетворювач-підсилювач каналу кута атаки, компаратор та перетворювач-підсилювач каналу кута ковзання, блок формування вихідних електричних U 2 65816 1 3 го тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, згідно з корисною моделлю введені двовісний гіроскопічний стабілізатор, двовісний підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами та зовнішню раму, а на внутрішній рамі двовісного карданового підвісу закріплений вимірювач повітряного тиску, на кожній осі двовісного карданового підвісу розміщені по два датчики кута, флюгерні датчики кута атаки та кута ковзання з перетворювачами кутів атаки та ковзання в електричні сигнали на осях підвісу флюгерних датчиків, компаратор та перетворювач-підсилювач каналу кута атаки, компаратор та перетворювачпідсилювач каналу кута ковзання, блок формування вихідних електричних сигналів для кута атаки та кута ковзання, причому скоба платформи і рама двовісного гіроскопічного стабілізатора механічно зв'язані за допомогою восьми шарнірів та чотирьох жорстких тяг зі скобою внутрішньої рами та зовнішньою рамою відповідно двовісного карданового підвісу вимірювача повітряного тиску, виходи перетворювача кута атаки в електричний сигнал та першого датчика кута на осі підвісу зовнішньої рами з'єднані з входом компаратора каналу кута атаки, вихід якого з'єднаний з входом перетворювача-підсилювача каналу кута атаки, вихід якого з'єднаний з входом датчика моменту другого двоступеневого гіроскопа гіроскопічного стабілізатора, виходи перетворювача кута ковзання в електричний сигнал та першого датчика кута на осі підвісу скоби внутрішньої рами карданового підвісу вимірювача повітряного тиску з'єднані з входом компаратора каналу кута ковзання, вихід якого з'єднаний з входом перетворювача-підсилювача каналу кута ковзання, вихід якого з'єднаний з входом датчика моменту першого двоступеневого гіроскопа гіроскопічного стабілізатора, виходи другого датчика кута на осі підвісу внутрішньої рами та другого датчика кута на осі підвісу зовнішньої рами карданового підвісу вимірювача повітряного тиску з'єднані з входами блока формування вихідних електричних сигналів для кута атаки та кута ковзання. На фіг. наведена структурно-кінематична схема системи орієнтування приймача повітряного тиску. Вимірювач повітряного тиску містить двовісний гіроскопічний стабілізатор 1 та двовісний кардановий підвіс 2, елементи яких за допомогою опор закріплені на корпусі 3. Двовісний кардановий підвіс 2 містить внутрішню раму 4, на якій закріплений приймач повітряного тиску 5, скобу 6 внутрішньої рами 4 та зовнішню раму 7. На осі підвісу внутрішньої рами 4 двовісного карданового підвісу 2 розміщені перший датчик кута 8 та другий датчик кута 9, на осі підвісу зовнішньої рами 7 двовісного карданового підвісу 2 розміщені третій датчик кута 10 та четвертий датчик кута 11. На корпусі 3 за допомогою опор розміщені флюгерний датчик 12 кута атаки та флюгерний датчик 1.3 кута ковзання, а на осях підвісу цих датчиків розміщені відповідно перетворювач 14 кута атаки в електричний сигнал та перетворювач 15 кута ковзання в електричний сигнал. Для обробки 65816 4 інформації з третього датчика кута 10 та перетворювача кута атаки в електричний сигнал 14 використані компаратор 16 та перетворювачпідсилювач 17 каналу кута атаки, а з третього датчика кута 8 та перетворювача кута ковзання в електричний сигнал 15 - компаратор 18 та перетворювач-підсилювач 19 каналу кута ковзання. Двовісний гіроскопічний стабілізатор 1 містить платформу 20, розміщену за допомогою осей 21 і 22 в рамі 23, яка в свою чергу підвішена в корпусі 3. Платформа 20 кінематично зв'язана зі скобою 24 платформи, шарнірно закріпленою в корпусі 3. У середині платформи 20 розміщені перший двоступеневий гіроскоп 25 та другий двоступеневий гіроскоп 26 із взаємно ортогональними осями чутливості. Вісь чутливості першого двоступеневого гіроскопа 26 паралельна осі підвісу рами 23. На осі підвісу першого двоступеневого гіроскопа 25 розміщені датчик кута 27 та датчик моменту 28; на осі підвісу другого двоступеневого гіроскопа 26 розміщені датчик кута 29 та датчик моменту ЗО. Двовісний гіроскопічний стабілізатор 1 містить дві системи силової гіроскопічної стабілізації. Перша з них складається з першого двоступеневого гіроскопа 25, датчика кута 27, підсилювачаперетворювача 31 і датчика моменту 32 на осі підвісу скоби 24 платформи 20. Друга система силової гіроскопічної стабілізації складається з другого двоступеневого гіроскопа 26, датчика кута 29, підсилювача-перетворювача 33 і датчика моменту 34 на осі підвісу рами 23. В кожній системі силової гіроскопічної стабілізації виходи датчиків кута 27, 29 з'єднані з входами підсилювачівперетворювачів 31, 33, виходи яких з'єднані з відповідними датчиками моментів: 32 в системі стабілізації платформи 20 та 34 в системі стабілізації рами 23. Скоба 6 внутрішньої рами 4 двовісного карданового підвісу 2 механічно зв'язана зі скобою 24 платформи 20 двовісного гіроскопічного стабілізатора 1 за допомогою двох жорстких тяг 35, 36 та чотирьох шарнірів 37, 38, 39, 40. Зовнішня рама 7 двовісного карданового підвісу 2 механічно зв'язана з рамою 23 двовісного гіроскопічного стабілізатора 1 за допомогою двох жорстких тяг 41, 42 та чотирьох шарнірів 43, 44, 45, 46. Виходи датчика кута 10 та перетворювача 14 кута атаки в електричний сигнал подані на вхід компаратора 16, вихід якого з'єднаний з входом перетворювача-підсилювача 17, а вихідний сигнал цього блока подається на датчик моменту 30 другого двоступеневого гіроскопа 26. Виходи першого датчика кута 8 та перетворювача 15 кута ковзання в електричний сигнал подаються на вхід компаратора 18, вихід якого з'єднаний з. входом перетворювача-підсилювача 19, а вихідний сигнал цього блока подається на датчик моменту 28 першого двоступеневого гіроскопа 25. Приймач повітряного тиску 5 має пневматичні виходи 47 і 48 повного і статичного тиску відповідно. Для формування вихідних сигналів, пропорційних кутам атаки і ковзання, служить блок 49, на входи якого подаються вихідні сигнали з датчиків кутів 9 і 11 двовісного карданового підвісу 2. Вихідні сигнали 50, 51 блока 49 пропорційні кутам атаки і ковзання відповідно. 5 Вимірювач повітряного тиску працює наступним чином. Задача системи в цілому - орієнтування приймача повітряного тиску 5 в просторі, щоб його повздовжня вісь в процесі руху корпуса 3 співпадала з вектором швидкості набігаючого потоку повітря. Це можливо реалізувати при наявності інформації про кути атаки і ковзання, які характеризують стан корпусу 3 в просторі відносно вектора швидкості набігаючого потоку повітря. В початковий момент часу приймач повітряного тиску 5 в двовісному кардановому підвісі 2 займає певне довільне положення і відносно корпусу З, і відносно вектора швидкості набігаючого потоку повітря. Кут відхилення флюгерного датчика 12 відносно осі OZ зв'язаної з корпусом 3 системи координат OXYZ є пропорційним куту атаки. Тому різниця вихідних сигналів перетворювача 14 кута атаки в електричний сигнал і третього датчика кута 10 зовнішньої рами 7 двовісного підвісу 2 є сигнал неузгодженості положення приймача повітряного тиску 5 відносно осі OZ. Цей сигнал формується за допомогою компаратора 16, перетворюється та підсилюється за допомогою перетворювачапідсилювача 17 і подається на датчик моменту 30 другого двоступеневого гіроскопа 26. В результаті має місце прецесія рами 23 гіроскопічного стабілізатора 1 відносно осі її підвісу. Поворот рами 23 за допомогою жорстких тяг 41, 42 та шарнірів 43, 44, 45, 46 обумовлює поворот рами 7 двовісного карданового підвісу 2 приймача повітряного тиску 5. Система працює таким чином, що сигнал неузгодженості на вході компаратора 16 наближається до нуля, тобто приймач повітряного тиску 5 орієнтується вздовж вектора швидкості набігаючого потоку повітря в площині XOY зв'язаної з корпусом 3 системи координат OXYZ. Аналогічним чином працює система в каналі кута ковзання. Кут відхилення флюгерного датчика 13 відносно осі OY зв'язаної з корпусом 3 системи координат OXYZ є пропорційним куту ковзання. Різниця вихідних сигналів перетворювача 15 кута ковзання в електричний сигнал і першого датчика кута 8 скоби 6 внутрішньої рами 4 двовісного карданового підвісу 2 є сигнал неузгодженості положення приймача повітряного тиску 5 відносно осі OY. Цей сигнал формується за допомогою перетворювача-підсилювача 19 і подається на датчик моменту 28 першого двоступеневого гіроскопа 25. В результаті з'являється прецесія платформи 20 і скоби 24 гіроскопічного стабілізатора 1 відносно осі їх підвісу. Поворот скоби 24 за допомогою жорстких тяг 35, 36 та шарнірів 37, 38, 39, 40 обумовлює поворот скоби 6 та внутрішньої рами 4 двовісного карданового підвісу 2 приймача повітряного 65816 6 тиску 5. При цьому поворот внутрішньої рами 4 здійснюється в такому напрямку, що сигнал неузгодженості на вході компаратора 18 наближається до нуля, тобто приймач повітряного тиску 5 орієнтується вздовж вектора швидкості набігаючого потоку повітря в площині XOZ зв'язаної з корпусом З системи координат OXYZ. Спільна робота системи в каналах кутів атаки і ковзання обумовлює орієнтацію повздовжньої осі приймача повітряного тиску 5 вздовж вектора швидкості набігаючого потоку повітря. Дві ідентичні системи силової гіроскопічної стабілізації призначені для компенсації збурюючих моментів відносно осей підвісу платформи 20, скоби 24 та рами 23 гіроскопічного стабілізатора 1. Чутливими елементами цих систем є двоступеневі гіроскопи - перший 25 (вісь чутливості паралельна осі OY) та другий 26 (вісь чутливості паралельна осі OZ). При виникненні збурюючого моменту відносно осей підвісу платформи 20 і скоби 24 виникає прецесія першого гіроскопа 25, з датчика кута 27 знімається вихідний сигнал, який подається на вхід підсилювача-перетворювача 31, а далі - на датчик моменту 32. Момент датчика 32, прикладений до осей підвісу платформи 20 та скоби 24, є рівним збурюючому моменту відносно цих осей, а його вектор направлений протилежно вектору збурюючого моменту. При виникненні збурюючого моменту відносно осей підвісу рами 23 виникає прецесія другого гіроскопа 26, з датчика кута 29 знімається вихідний сигнал, який подається на вхід підсилювача-перетворювача 33, а далі - на датчик моменту 34. Момент датчика 34, прикладений до осей підвісу рами 23, є рівним збурюючому моменту відносно цієї осі, а його вектор направлений протилежно вектору збурюючого моменту. Вихідні сигнали, пропорційні кутам атаки і ковзання, знімаються з четвертого та другого датчиків кутів 11 і 9 відповідно двовісного карданового підвісу 2 і подаються на блок 49, за допомогою якого формуються вихідні сигнали 50 і 51, пропорційні кутам атаки та ковзання, у потрібному вигляді. Використання системи у складі гіроскопічного стабілізатора 1, карданового підвісу 2 і блока 49 для формування вихідних сигналів, пропорційних кутам атаки і ковзання, дозволяє виключити вплив високочастотних збурень в цих сигналах, які присутні в вихідних сигналах перетворювачів 14 і 15 флюгерних датчиків кута атаки 12 і кута ковзання 13. Таким чином, запропонована система дозволяє збільшити точність вимірювання повітряного тиску за рахунок введення вимірювача повітряного тиску. 7 Комп’ютерна верстка Г. Паяльніков 65816 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAir pressure measuring device
Автори англійськоюPostnikov Volodymyr Mykolaiovych, Hanin Yevhen Serhiiovych, Davydenko Serhii Oleksandrovych, Pak Lidiia Oleksandrivna
Назва патенту російськоюИзмеритель воздушного давления
Автори російськоюПостников Владимир Николаевич, Ганин Евгений Сергеевич, Давиденко Сергей Александрович, Пак Лидия Александровна
МПК / Мітки
МПК: G01P 5/14, G01P 13/00
Мітки: тиску, повітряного, вимірювач
Код посилання
<a href="https://ua.patents.su/4-65816-vimiryuvach-povitryanogo-tisku.html" target="_blank" rel="follow" title="База патентів України">Вимірювач повітряного тиску</a>
Система орієнтування приймача повітряного тиску
Номер патенту: 56886
Опубліковано: 25.01.2011
Автори: Гордін Олександр Григорович, Сушко Олексій Володимирович, Кописов Олег Едуардович
МПК: G01P 13/00, G01P 5/14
Мітки: повітряного, тиску, орієнтування, система, приймача
Формула / Реферат:
1. Система орієнтування приймача повітряного тиску, що містить закріплений на корпусі літального апарата приймач повітряного тиску, в носовій частині якого виконаний отвір для визначення повного тиску, збоку знаходяться отвори для визначення статичного тиску, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, двовісний підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на...
Відмовостійка система орієнтування датчиків повітряних параметрів

Номер патенту: 62526
Опубліковано: 25.08.2011
Автори: Гордін Олександр Григорович, Гавриленко Ірина Володимирівна
МПК: G01P 5/14
Мітки: відмовостійка, повітряних, датчиків, система, орієнтування, параметрів
Формула / Реферат:
1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по...
Система орієнтування приймача температури загальмованого потоку повітря

Номер патенту: 58995
Опубліковано: 26.04.2011
Автори: Гордін Олександр Григорович, Гавриленко Ірина Володимирівна
МПК: G01P 5/14
Мітки: температури, повітря, система, приймача, орієнтування, потоку, загальмованого
Формула / Реферат:
1. Система орієнтування приймача температури загальмованого потоку повітря, що містить закріплений на поверхні літального апарата корпус приймача температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, двовісний кардановий підвіс, який містить внутрішню раму, зв'язану зі скобою внутрішньої рами, та зовнішню раму, а на внутрішній рамі двовісного карданового підвісу закріплений...
Гіронапівкомпас
Номер патенту: 54313
Опубліковано: 10.11.2010
Автори: Корнійчук Валєнтін Васільєвіч, Мелешко Владислав Валентинович, Янчевський Андрій Юрійович, Скуднєва Оксана Валентинівна
МПК: G01C 19/00
Мітки: гіронапівкомпас
Формула / Реферат:
Гіронапівкомпас, який містить гіродвигун, закріплений у зовнішній рамці карданового підвісу, датчик азимутального кута на осі підвісу зовнішньої рамки, датчик моменту азимутальної корекції на осі підвісу гіродвигуна, маятниковий датчик кута горизонтальної корекції на осі підвісу гіродвигуна, датчик моменту горизонтальної корекції на вертикальній осі підвісу зовнішньої рамки, підсилювач, який з'єднує маятниковий датчик кута горизонтальної...
Фюзеляжний приймач повітряного тиску і аеродинамічний профіль, який використовується в ньому
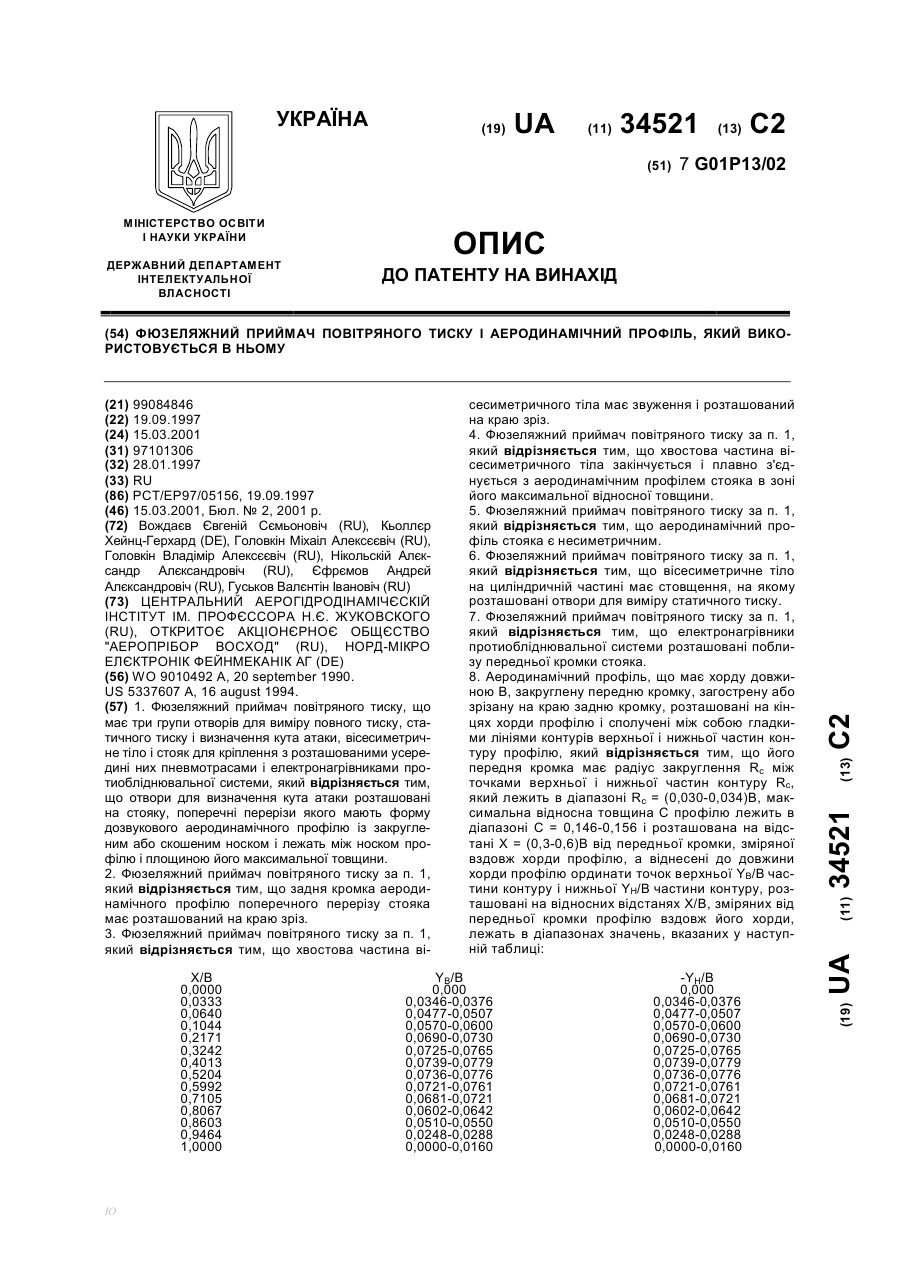
Номер патенту: 34521
Опубліковано: 15.03.2001
Автори: Нікольскій Алєксандр Алєксандровіч, Гуськов Валєнтін Івановіч, Кьоллєр Хейнц-Герхард, Вождаєв Євгєній Сємьоновіч, Головкін Міхаіл Алексєєвіч, Головкін Владімір Алєксєєвіч, Єфрємов Андрєй Алєксандровіч
МПК: G01P 5/14, G01P 13/02
Мітки: повітряного, ньому, тиску, приймач, аеродинамічний, використовується, профіль, фюзеляжний
Формула / Реферат:
1. Фюзеляжний приймач повітряного тиску, що має три групи отворів для виміру повного тиску, статичного тиску і визначення кута атаки, вісесиметричне тіло і стояк для кріплення з розташованими усередині них пневмотрасами і електронагрівниками протиобліднювальної системи, який відрізняється тим, що отвори для визначення кута атаки розташовані на стояку, поперечні перерізи якого мають форму дозвукового аеродинамічного профілю із закругленим або...
Попередній патент: Пристрій для оброблення чисел
Наступний патент: Формувач симетричної трифазної послідовності з перенастроюваною тривалістю імпульсів
Випадковий патент: Набір моноклональних антитіл р2, р3, р4, р5, р6, специфічних до білка р24 вірусу імунодефіциту людини, придатних до використання у імуноферментному аналізі