Асинхронний двигун для частотно-регульованого електроприводу
Номер патенту: 66073
Опубліковано: 26.12.2011

Формула / Реферат
1. Асинхронний двигун для частотно-регульованого електроприводу, який містить статор, набраний з листів електротехнічної сталі, і короткозамкнений ротор у вигляді "білячої клітки", обмотка статора якого живиться напругою з підвищеним значенням частоти, який відрізняється тим, що головна довжина статора і ротора зменшена і визначається за умови отримання необхідного значення критичного моменту двигуна при живленні його напругою з підвищеною частотою.
2. Двигун за п. 1, який відрізняється тим, що кількість витків обмотки статора зменшено і визначається за умови збереження сталості електромагнітних навантажень за формулою:
![]() ,
,
де ![]() - номінальна та зменшена кількість витків обмотки статора,
- номінальна та зменшена кількість витків обмотки статора, ![]() - номінальне та підвищене значення частоти живильної напруги,
- номінальне та підвищене значення частоти живильної напруги, ![]() - номінальне та зменшене значення головної довжини статора та ротора.
- номінальне та зменшене значення головної довжини статора та ротора.
3. Двигун за п. 1, який відрізняється тим, що обмотка статора має шість полюсів в кожній фазі і живиться напругою з частотою до 150 Гц.
Текст
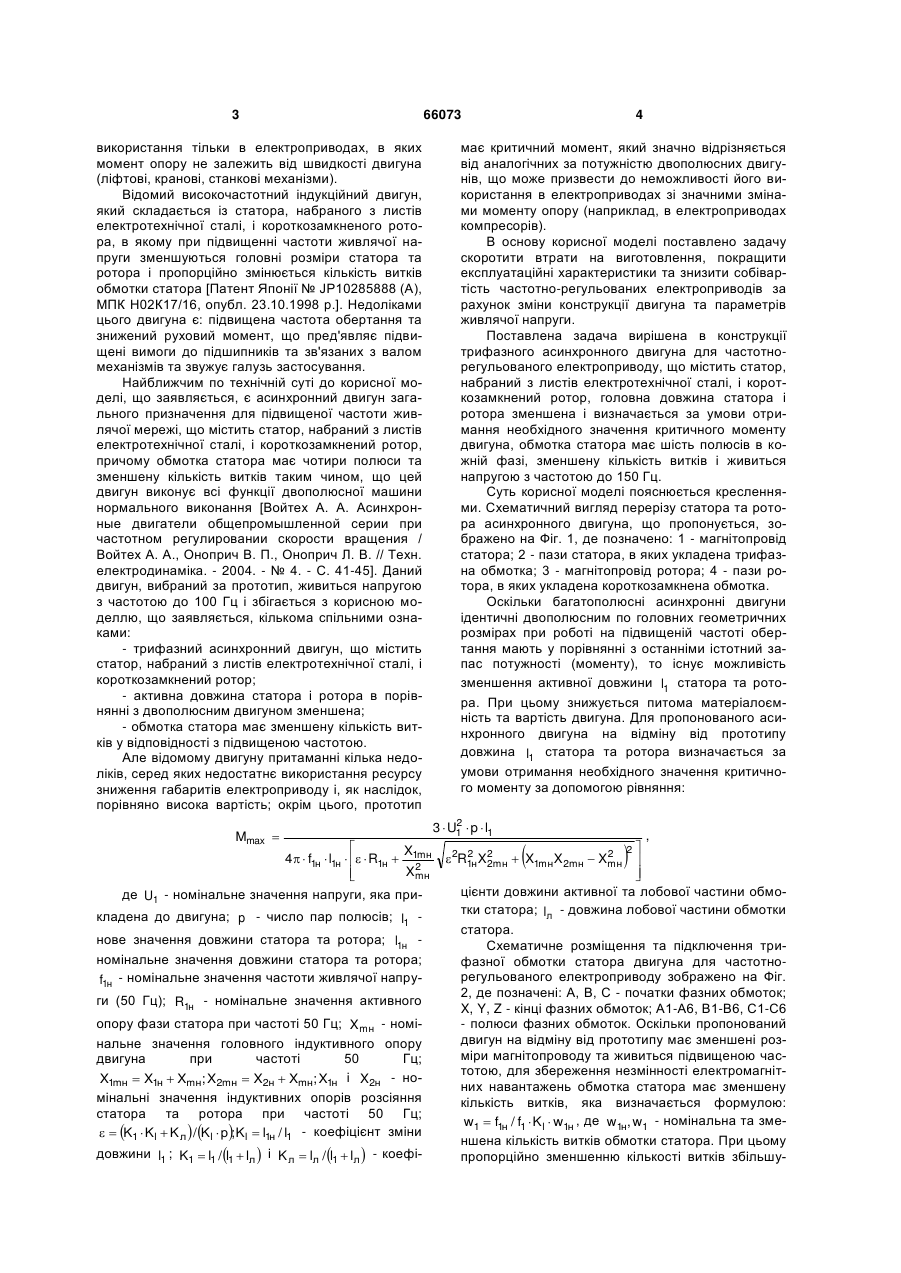
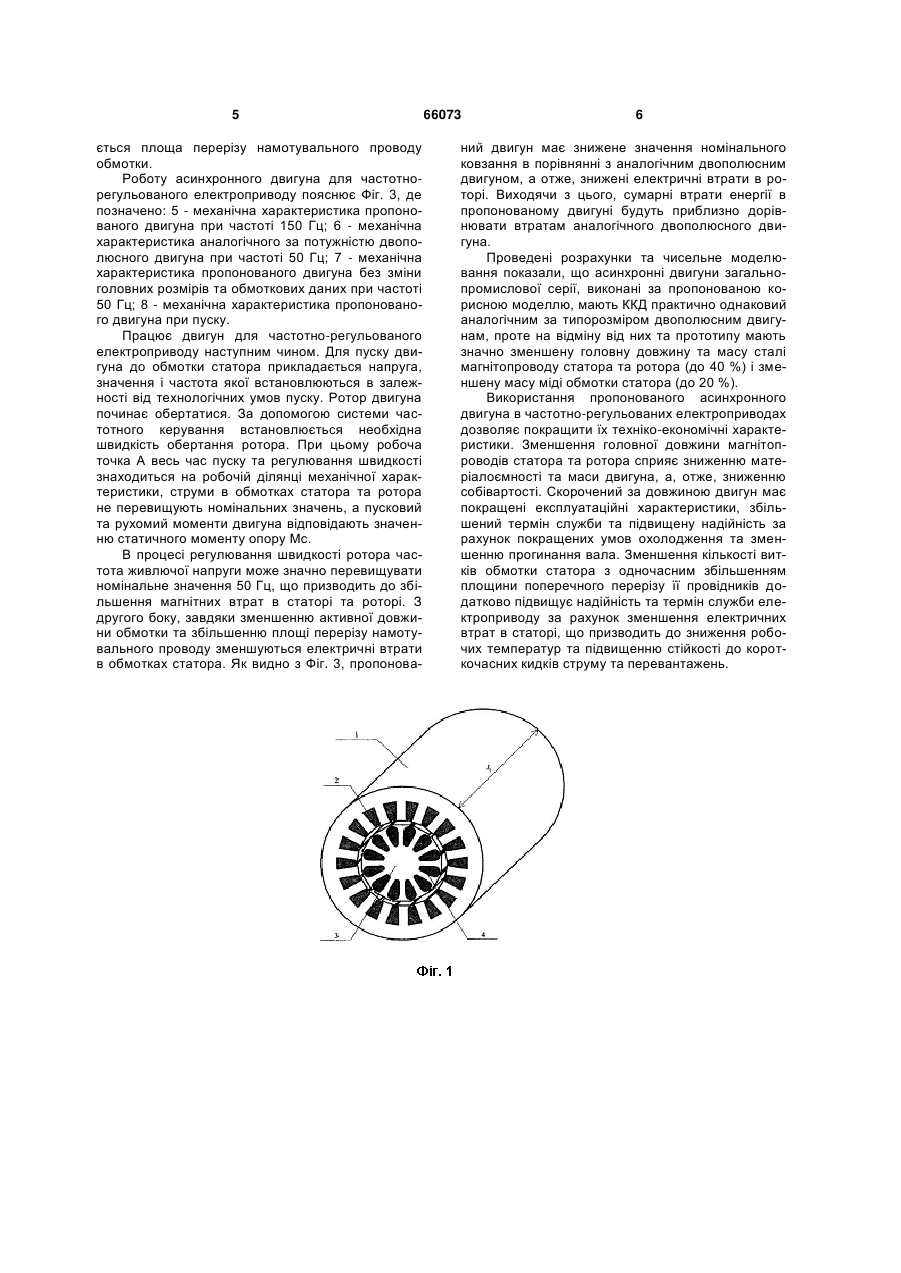
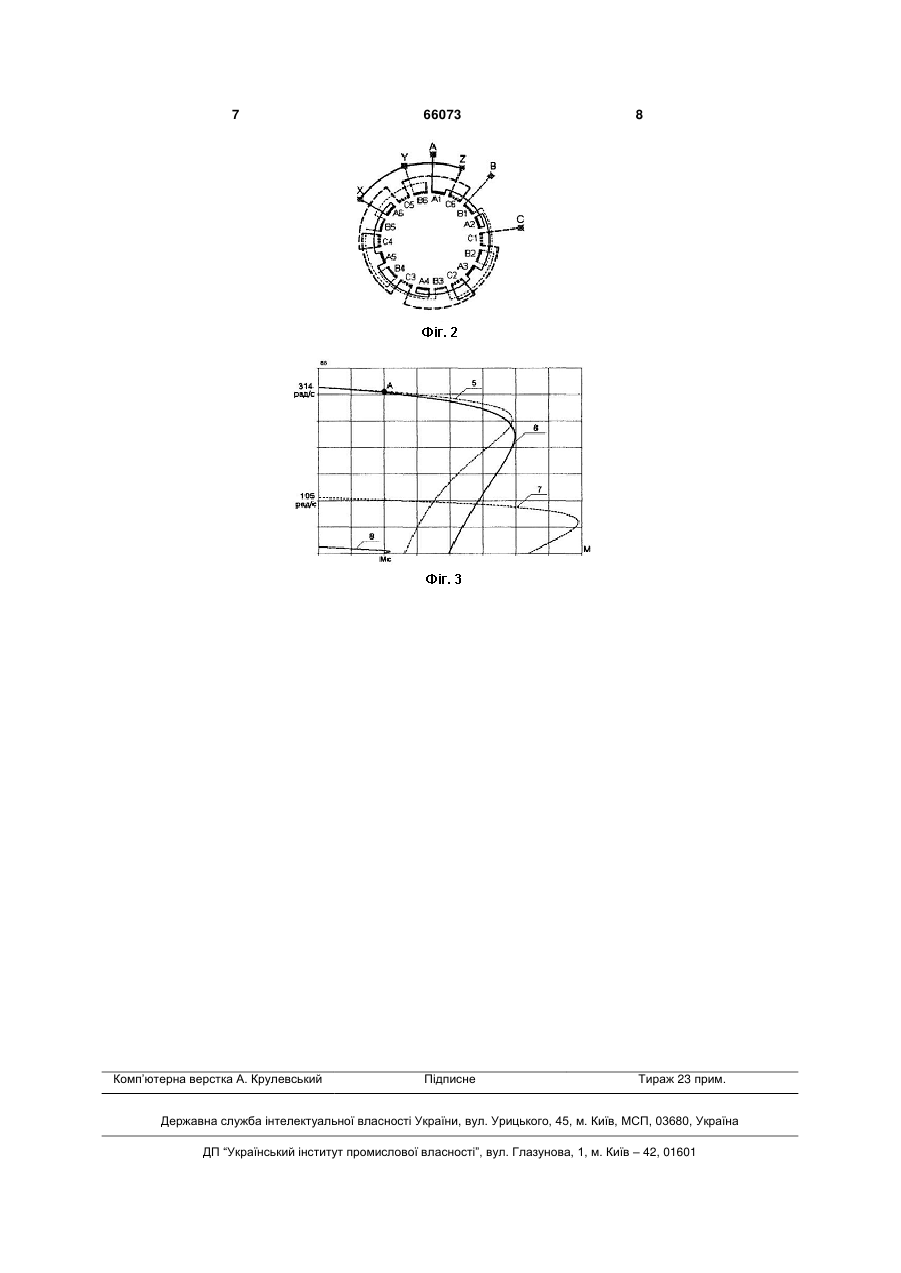
1. Асинхронний двигун для частотнорегульованого електроприводу, який містить статор, набраний з листів електротехнічної сталі, і короткозамкнений ротор у вигляді "білячої клітки", обмотка статора якого живиться напругою з підвищеним значенням частоти, який відрізняється тим, що головна довжина статора і ротора зменшена і визначається за умови отримання необхідного значення критичного моменту двигуна при живленні його напругою з підвищеною частотою. 2. Двигун за п. 1, який відрізняється тим, що кількість витків обмотки статора зменшено і визначається за умови збереження сталості електромагнітних навантажень за формулою: f l w1 1н 1н w1н , f1 l1 Корисна модель належить до галузі електромашинобудування і може бути використана для частотно-регульованих електроприводів малої потужності з метою зниження втрат на виготовлення названих електроприводів, поліпшення їх масогабаритних показників. Відомі однофазні асинхронні двигуни, що містять статор, набраний з листів електротехнічної сталі, і короткозамкнений ротор у вигляді «білячої клітки» [Лопухина Е. М. Автоматизированное проектирование электрических машин малой мощности / Е. М. Лопухина, Г. А. Семенчуков. - М. : Высшая школа, 2002. - 512 с]. В абсолютній більшості випадків вказані двигуни працюють в позиційному режимі як електроприводи компресорів, вентиляторів та насосів. Перехід до частотного регулювання швидкості цих двигунів недоцільно з приводу того, що за рахунок наявності струмів зворотної послідовності та еліптичного магнітного поля однофазні двигуни мають в порівнянні з трифазними збільшені масогабаритні показники, невисокий ККД та cos . З метою поліпшення енергетичних та масогабаритних показників частотно-регульованих електроприводів малої потужності рекомендується використовувати трифазні асинхронні двигуни, причому конструктивні параметри цих двигунів постійно модернізуються. Відомий асинхронний двигун для частотнорегульованого електроприводу, що містить статор і ротор, набраний з листів електротехнічної сталі, статор і ротор виконані таким чином, що центральний кут скосу пазів дорівнює нулю, короткозамикаючі кільця обмотки ротора виконані гладкими, а обмотка ротора виконана з міді [Патент України № 50375, МПК Н02К17/00, бюл. № 11, 2010 p.]. Цей двигун має кілька недоліків: не використовує можливості зменшення розмірів та маси двигуна; і як наслідок, має місце висока вартість всього частотно-регульованого електроприводу в порівнянні з позиційним регулюванням швидкості. Відомий асинхронний двигун для безредукторного електроприводу, який виконаний з підвищеним числом витків обмотки статора з метою зменшення струму, на який вибирається перетворювач частоти, що знижує його вартість [Патент Російської Федерації № 55224, МПК Н02К3/00, Н02К17/00, опубл. 27.07.2006 p.]. Незважаючи на часткове вирішення зниження вартості частотнорегульованого електроприводу цей двигун має кілька суттєвих недоліків: значно занижений ККД та перевантажувальну здатність, завдяки підвищенню електричних втрат в статорі; можливість де w1н, w1 - номінальна та зменшена кількість витків обмотки статора, f1н, f1 - номінальне та підви (19) UA (11) 66073 (13) U щене значення частоти живильної напруги, l1н, l1 номінальне та зменшене значення головної довжини статора та ротора. 3. Двигун за п. 1, який відрізняється тим, що обмотка статора має шість полюсів в кожній фазі і живиться напругою з частотою до 150 Гц. 3 використання тільки в електроприводах, в яких момент опору не залежить від швидкості двигуна (ліфтові, кранові, станкові механізми). Відомий високочастотний індукційний двигун, який складається із статора, набраного з листів електротехнічної сталі, і короткозамкненого ротора, в якому при підвищенні частоти живлячої напруги зменшуються головні розміри статора та ротора і пропорційно змінюється кількість витків обмотки статора [Патент Японії № JP10285888 (А), МПК Н02К17/16, опубл. 23.10.1998 p.]. Недоліками цього двигуна є: підвищена частота обертання та знижений руховий момент, що пред'являє підвищені вимоги до підшипників та зв'язаних з валом механізмів та звужує галузь застосування. Найближчим по технічній суті до корисної моделі, що заявляється, є асинхронний двигун загального призначення для підвищеної частоти живлячої мережі, що містить статор, набраний з листів електротехнічної сталі, і короткозамкнений ротор, причому обмотка статора має чотири полюси та зменшену кількість витків таким чином, що цей двигун виконує всі функції двополюсної машини нормального виконання [Войтех А. А. Асинхронные двигатели общепромышленной серии при частотном регулировании скорости вращения / Войтех А. А., Оноприч В. П., Оноприч Л. В. // Техн. електродинаміка. - 2004. - № 4. - С. 41-45]. Даний двигун, вибраний за прототип, живиться напругою з частотою до 100 Гц і збігається з корисною моделлю, що заявляється, кількома спільними ознаками: - трифазний асинхронний двигун, що містить статор, набраний з листів електротехнічної сталі, і короткозамкнений ротор; - активна довжина статора і ротора в порівнянні з двополюсним двигуном зменшена; - обмотка статора має зменшену кількість витків у відповідності з підвищеною частотою. Але відомому двигуну притаманні кілька недоліків, серед яких недостатнє використання ресурсу зниження габаритів електроприводу і, як наслідок, порівняно висока вартість; окрім цього, прототип Mmax 66073 4 має критичний момент, який значно відрізняється від аналогічних за потужністю двополюсних двигунів, що може призвести до неможливості його використання в електроприводах зі значними змінами моменту опору (наприклад, в електроприводах компресорів). В основу корисної моделі поставлено задачу скоротити втрати на виготовлення, покращити експлуатаційні характеристики та знизити собівартість частотно-регульованих електроприводів за рахунок зміни конструкції двигуна та параметрів живлячої напруги. Поставлена задача вирішена в конструкції трифазного асинхронного двигуна для частотнорегульованого електроприводу, що містить статор, набраний з листів електротехнічної сталі, і короткозамкнений ротор, головна довжина статора і ротора зменшена і визначається за умови отримання необхідного значення критичного моменту двигуна, обмотка статора має шість полюсів в кожній фазі, зменшену кількість витків і живиться напругою з частотою до 150 Гц. Суть корисної моделі пояснюється кресленнями. Схематичний вигляд перерізу статора та ротора асинхронного двигуна, що пропонується, зображено на Фіг. 1, де позначено: 1 - магнітопровід статора; 2 - пази статора, в яких укладена трифазна обмотка; 3 - магнітопровід ротора; 4 - пази ротора, в яких укладена короткозамкнена обмотка. Оскільки багатополюсні асинхронні двигуни ідентичні двополюсним по головних геометричних розмірах при роботі на підвищеній частоті обертання мають у порівнянні з останніми істотний запас потужності (моменту), то існує можливість зменшення активної довжини l1 статора та ротора. При цьому знижується питома матеріалоємність та вартість двигуна. Для пропонованого асинхронного двигуна на відміну від прототипу довжина l1 статора та ротора визначається за умови отримання необхідного значення критичного моменту за допомогою рівняння: 2 3 U1 p l1 , X1mн 2 2 2 2 2 4 f1н l1н R1н 2 R1н X2mн X1mн X2mн Xmн Xmн цієнти довжини активної та лобової частини обмоде U1 - номінальне значення напруги, яка притки статора; lл - довжина лобової частини обмотки кладена до двигуна; p - число пар полюсів; l1 статора. нове значення довжини статора та ротора; l1н Схематичне розміщення та підключення триномінальне значення довжини статора та ротора; фазної обмотки статора двигуна для частотнорегульованого електроприводу зображено на Фіг. f1н - номінальне значення частоти живлячої напру2, де позначені: А, В, С - початки фазних обмоток; ги (50 Гц); R1н - номінальне значення активного X, Y, Z - кінці фазних обмоток; А1-А6, В1-В6, С1-С6 опору фази статора при частоті 50 Гц; Xmн - номі- полюси фазних обмоток. Оскільки пропонований двигун на відміну від прототипу має зменшені рознальне значення головного індуктивного опору міри магнітопроводу та живиться підвищеною часдвигуна при частоті 50 Гц; тотою, для збереження незмінності електромагніті X2н - ноX1mн X1н Xmн; X2mн X2н Xmн; X1н них навантажень обмотка статора має зменшену мінальні значення індуктивних опорів розсіяння кількість витків, яка визначається формулою: статора та ротора при частоті 50 Гц; w1 f1н / f1 Kl w1н , де w1н, w1 - номінальна та зме K1 Kl K л / Kl р;Kl l1н / l1 - коефіцієнт зміни ншена кількість витків обмотки статора. При цьому довжини l1 ; K1 l1 / l1 lл і K л lл / l1 lл - коефіпропорційно зменшенню кількості витків збільшу 5 ється площа перерізу намотувального проводу обмотки. Роботу асинхронного двигуна для частотнорегульованого електроприводу пояснює Фіг. 3, де позначено: 5 - механічна характеристика пропонованого двигуна при частоті 150 Гц; 6 - механічна характеристика аналогічного за потужністю двополюсного двигуна при частоті 50 Гц; 7 - механічна характеристика пропонованого двигуна без зміни головних розмірів та обмоткових даних при частоті 50 Гц; 8 - механічна характеристика пропонованого двигуна при пуску. Працює двигун для частотно-регульованого електроприводу наступним чином. Для пуску двигуна до обмотки статора прикладається напруга, значення і частота якої встановлюються в залежності від технологічних умов пуску. Ротор двигуна починає обертатися. За допомогою системи частотного керування встановлюється необхідна швидкість обертання ротора. При цьому робоча точка А весь час пуску та регулювання швидкості знаходиться на робочій ділянці механічної характеристики, струми в обмотках статора та ротора не перевищують номінальних значень, а пусковий та рухомий моменти двигуна відповідають значенню статичного моменту опору Мс. В процесі регулювання швидкості ротора частота живлючої напруги може значно перевищувати номінальне значення 50 Гц, що призводить до збільшення магнітних втрат в статорі та роторі. З другого боку, завдяки зменшенню активної довжини обмотки та збільшенню площі перерізу намотувального проводу зменшуються електричні втрати в обмотках статора. Як видно з Фіг. 3, пропонова 66073 6 ний двигун має знижене значення номінального ковзання в порівнянні з аналогічним двополюсним двигуном, а отже, знижені електричні втрати в роторі. Виходячи з цього, сумарні втрати енергії в пропонованому двигуні будуть приблизно дорівнювати втратам аналогічного двополюсного двигуна. Проведені розрахунки та чисельне моделювання показали, що асинхронні двигуни загальнопромислової серії, виконані за пропонованою корисною моделлю, мають ККД практично однаковий аналогічним за типорозміром двополюсним двигунам, проте на відміну від них та прототипу мають значно зменшену головну довжину та масу сталі магнітопроводу статора та ротора (до 40 %) і зменшену масу міді обмотки статора (до 20 %). Використання пропонованого асинхронного двигуна в частотно-регульованих електроприводах дозволяє покращити їх техніко-економічні характеристики. Зменшення головної довжини магнітопроводів статора та ротора сприяє зниженню матеріалоємності та маси двигуна, а, отже, зниженню собівартості. Скорочений за довжиною двигун має покращені експлуатаційні характеристики, збільшений термін служби та підвищену надійність за рахунок покращених умов охолодження та зменшенню прогинання вала. Зменшення кількості витків обмотки статора з одночасним збільшенням площини поперечного перерізу її провідників додатково підвищує надійність та термін служби електроприводу за рахунок зменшення електричних втрат в статорі, що призводить до зниження робочих температур та підвищенню стійкості до короткочасних кидків струму та перевантажень. 7 Комп’ютерна верстка А. Крулевський 66073 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAsynchronous motor for a frequency controlled electric motor
Автори англійськоюBukaros Andrii Yuriiovych, Onischenko Oleh Anatoliiovych
Назва патенту російськоюАсинхронный двигатель для частотно-регулируемого электропривода
Автори російськоюБукарос Андрей Юрьевич, Онищенко Олег Анатольевич
МПК / Мітки
МПК: H02K 17/00
Мітки: асинхронний, електроприводу, двигун, частотно-регульованого
Код посилання
<a href="https://ua.patents.su/4-66073-asinkhronnijj-dvigun-dlya-chastotno-regulovanogo-elektroprivodu.html" target="_blank" rel="follow" title="База патентів України">Асинхронний двигун для частотно-регульованого електроприводу</a>
Асинхронний електродвигун для частотно-регульованого електроприводу

Номер патенту: 50375
Опубліковано: 10.06.2010
Автори: Волков Ігор Володимирович, Войтех Володимир Олександрович, Плугатар Олексій Петрович
МПК: H02K 17/00
Мітки: асинхронний, електродвигун, електроприводу, частотно-регульованого
Формула / Реферат:
Асинхронний електродвигун для частотно-регульованого електроприводу, який містить статор і ротор, набраний з листів електротехнічної сталі, який відрізняється тим, що статор і ротор виконані таким чином, що центральний кут скосу пазів дорівнює нулю, короткозамикаючі кільця обмотки ротора виконані гладкими, а обмотка ротора виконана з міді.
Асинхронний двигун

Номер патенту: 36490
Опубліковано: 27.10.2008
Автори: Шейко Валентина Григорівна, Кукулевський Олексій Васильович, Макаров Констянтин Дмитрійович
МПК: H02K 3/18, H02K 17/02, H02K 17/12
Мітки: асинхронний, двигун
Формула / Реферат:
1. Асинхронний двигун, що містить шихтований статор, з розміщеною у ньому жорсткою обмоткою, і короткозамкнутий ротор, який відрізняється тим, що діаметр розточування (Др) статора визначається із співвідношення:Др = 0,53•Да•р0,275,де Да - зовнішній діаметр заліза статора; р - число пар полюсів.2. Асинхронний двигун за п. 1, який відрізняється тим, що площа паза (Sn) для мідного стержня ротора складає (0,0028-0,0029)Др2,...
Асинхронний двигун циліндричного, конусного або торчакового виконання
Номер патенту: 53295
Опубліковано: 11.10.2010
Автори: Войтович Володимир Кіндратович, Андрейко Іван Іванович
МПК: H02K 17/00
Мітки: торчакового, двигун, циліндричного, конусного, виконання, асинхронний
Формула / Реферат:
Асинхронний двигун циліндричного, конусного або торчакового виконання, що містить статор, який відрізняється тим, що на статорі розташована бaгaтoфaзнa розподілена обмотка, активні сторони секції якої скошені на постійний або змінний по довжині машини кут скошення , більший за кут між сусідніми зубцями ,...
Осьовий асинхронний двигун
Номер патенту: 78438
Опубліковано: 15.03.2007
Автори: Лакатош Олександр Валентинович, Лакатош Валентин Павлович, Данилова Оксана Вікторівна
МПК: H02K 17/12
Мітки: осьовий, асинхронний, двигун
Формула / Реферат:
Осьовий асинхронний двигун, що містить статор з обмоткою та розташований на валу ротор з короткозамкненою обмоткою, який відрізняється тим, що статор виконаний у вигляді щонайменше двох дисків, перший і останній диск якого має односторонню трифазну обмотку, а інші - двосторонню трифазну обмотку, між дисками статора розташований ротор, виконаний у вигляді диска, причому обмотки статора і ротора виконані радіальними.
Асинхронний двигун
Номер патенту: 30906
Опубліковано: 15.12.2000
Автори: Мішин Володимир Іванович, Чуєнко Роман Миколайович, Тарасенко Ростислав Олександрович, Чуєнко Микола Онисимович
МПК: H02K 17/34
Мітки: асинхронний, двигун
Формула / Реферат:
Асинхронний двигун, який має короткозамкнений ротор, трифазну статорну обмотку, який відрізняється тим, що кожну фазну обмотку статора виконують з двох паралельних віток, які мають різні числа витків, а у вітку з більшим числом витків включають конденсатор поздовжньої ємнісної компенсації.
Попередній патент: Спосіб виробництва консервованих слив
Наступний патент: Металокерамічний ущільнювальний матеріал
Випадковий патент: Попередній підсилювач з діагностикою датчика