Спосіб посилення керуючих електричних сигналів
Номер патенту: 73665
Опубліковано: 15.08.2005
Автори: Розорінов Георгій Миколайович, Єгоров Олексій Констянтинович

Формула / Реферат
(21) 20031211604
(57)
1. Спосіб посилення керуючих електричних сигналів, що включає регулювання потоку потужності, що надходить у навантаження, за допомогою перемінного параметра, який відрізняється тим, що як перемінний параметр використовують ймовірність того, що миттєві значення керуючого електричного сигналу не перевищать по величині миттєвих значень зразкового випадкового електричного сигналу, для чого керуючий електричний сигнал порівнюють зі зразковим випадковим електричним сигналом, а результат порівняння статистично усереднюють.
2. Спосіб за п. 1, який відрізняється тим, що як зразковий випадковий електричний сигнал використовують внутрішній шум активного елемента.
3. Спосіб за п. 1, який відрізняється тим, що результат порівняння статистично усереднюють за часом.
Начальник відділу
К.В. Жданенко
Виконавець
В.В. Нестерук
Текст
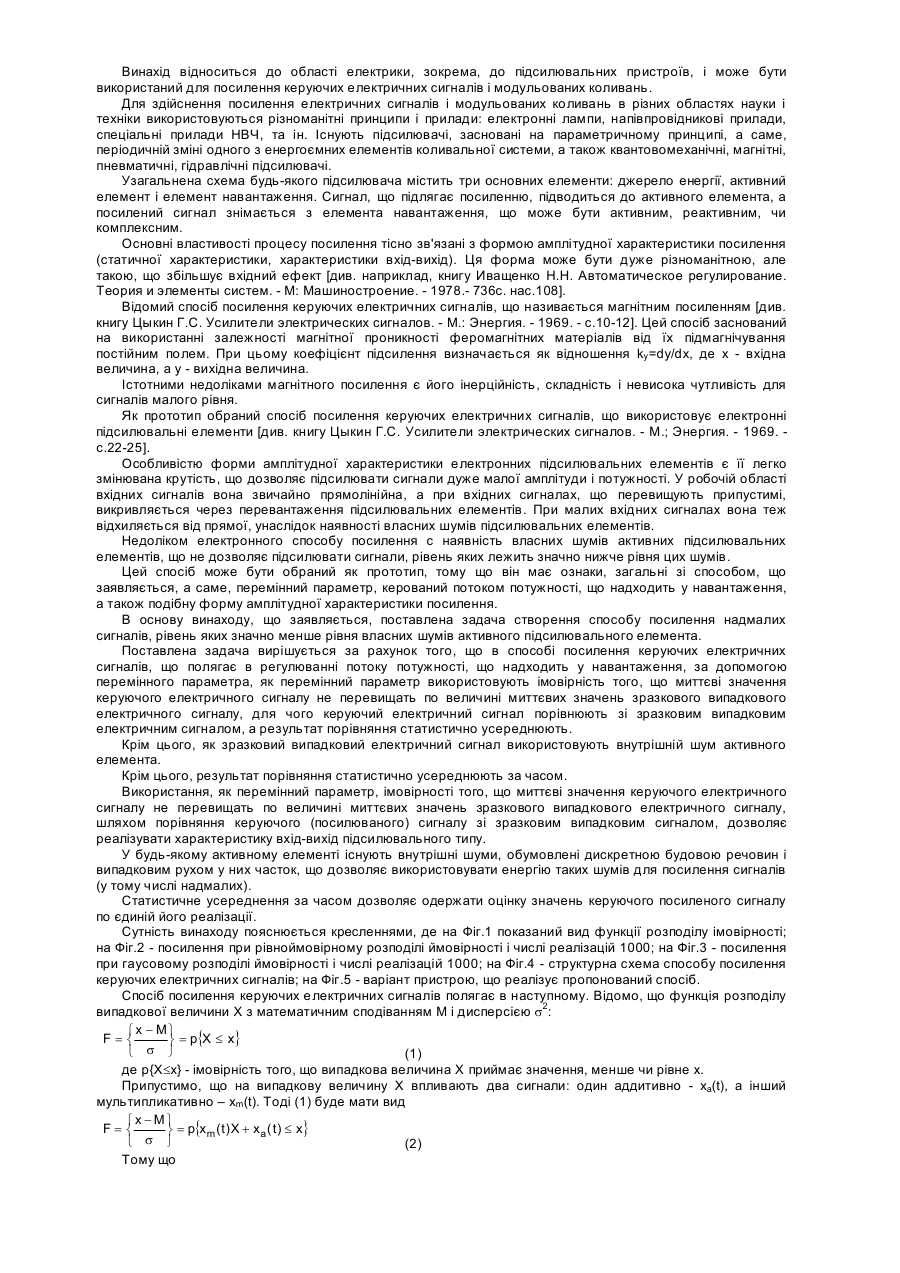
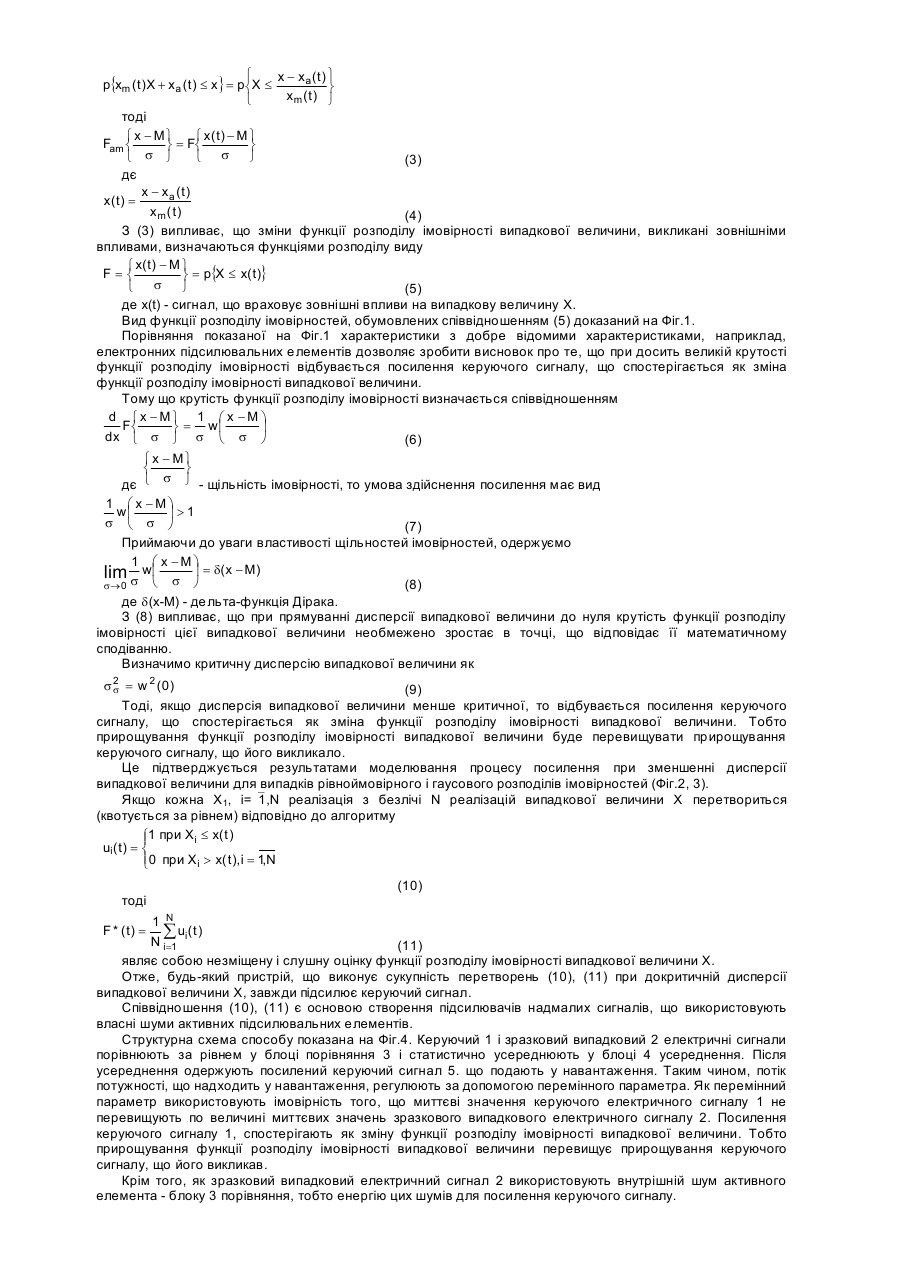
Винахід відноситься до області електрики, зокрема, до підсилювальних пристроїв, і може бути використаний для посилення керуючих електричних сигналів і модульованих коливань. Для здійснення посилення електричних сигналів і модульованих коливань в різних областях науки і техніки використовуються різноманітні принципи і прилади: електронні лампи, напівпровідникові прилади, спеціальні прилади НВЧ, та ін. Існують підсилювачі, засновані на параметричному принципі, а саме, періодичній зміні одного з енергоємних елементів коливальної системи, а також квантовомеханічні, магнітні, пневматичні, гідравлічні підсилювачі. Узагальнена схема будь-якого підсилювача містить три основних елементи: джерело енергії, активний елемент і елемент навантаження. Сигнал, що підлягає посиленню, підводиться до активного елемента, а посилений сигнал знімається з елемента навантаження, що може бути активним, реактивним, чи комплексним. Основні властивості процесу посилення тісно зв'язані з формою амплітудної характеристики посилення (статичної характеристики, характеристики вхід-вихід). Ця форма може бути дуже різноманітною, але такою, що збільшує вхідний ефект [див. наприклад, книгу Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. - М: Машиностроение. - 1978.- 736с. нас.108]. Відомий спосіб посилення керуючих електричних сигналів, що називається магнітним посиленням [див. книгу Цыкин Г.С. Усилители электрических сигналов. - М.: Энергия. - 1969. - с.10-12]. Цей спосіб заснований на використанні залежності магнітної проникності феромагнітних матеріалів від їх підмагнічування постійним полем. При цьому коефіцієнт підсилення визначається як відношення ky=dy/dx, де x - вхідна величина, а y - вихідна величина. Істотними недоліками магнітного посилення є його інерційність, складність і невисока чутливість для сигналів малого рівня. Як прототип обраний спосіб посилення керуючих електричних сигналів, що використовує електронні підсилювальні елементи [див. книгу Цыкин Г.С. Усилители электрических сигналов. - М.; Энергия. - 1969. с.22-25]. Особливістю форми амплітудної характеристики електронних підсилювальних елементів є її легко змінювана крутість, що дозволяє підсилювати сигнали дуже малої амплітуди і потужності. У робочій області вхідних сигналів вона звичайно прямолінійна, а при вхідних сигналах, що перевищують припустимі, викривляється через перевантаження підсилювальних елементів. При малих вхідних сигналах вона теж відхиляється від прямої, унаслідок наявності власних шумів підсилювальних елементів. Недоліком електронного способу посилення с наявність власних шумів активних підсилювальних елементів, що не дозволяє підсилювати сигнали, рівень яких лежить значно нижче рівня цих шумів. Цей спосіб може бути обраний як прототип, тому що він має ознаки, загальні зі способом, що заявляється, а саме, перемінний параметр, керований потоком потужності, що надходить у навантаження, а також подібну форму амплітудної характеристики посилення. В основу винаходу, що заявляється, поставлена задача створення способу посилення надмалих сигналів, рівень яких значно менше рівня власних шумів активного підсилювального елемента. Поставлена задача вирішується за рахунок того, що в способі посилення керуючих електричних сигналів, що полягає в регулюванні потоку потужності, що надходить у навантаження, за допомогою перемінного параметра, як перемінний параметр використовують імовірність того, що миттєві значення керуючого електричного сигналу не перевищать по величині миттєвих значень зразкового випадкового електричного сигналу, для чого керуючий електричний сигнал порівнюють зі зразковим випадковим електричним сигналом, а результат порівняння статистично усереднюють. Крім цього, як зразковий випадковий електричний сигнал використовують внутрішній шум активного елемента. Крім цього, результат порівняння статистично усереднюють за часом. Використання, як перемінний параметр, імовірності того, що миттєві значення керуючого електричного сигналу не перевищать по величині миттєвих значень зразкового випадкового електричного сигналу, шляхом порівняння керуючого (посилюваного) сигналу зі зразковим випадковим сигналом, дозволяє реалізувати характеристику вхід-вихід підсилювального типу. У будь-якому активному елементі існують внутрішні шуми, обумовлені дискретною будовою речовин і випадковим рухом у них часток, що дозволяє використовувати енергію таких шумів для посилення сигналів (у тому числі надмалих). Статистичне усереднення за часом дозволяє одержати оцінку значень керуючого посиленого сигналу по єдиній його реалізації. Сутність винаходу пояснюється кресленнями, де на Фіг.1 показаний вид функції розподілу імовірності; на Фіг.2 - посилення при рівноймовірному розподілі ймовірності і числі реалізацій 1000; на Фіг.3 - посилення при гаусовому розподілі ймовірності і числі реалізацій 1000; на Фіг.4 - структурна схема способу посилення керуючих електричних сигналів; на Фіг.5 - варіант пристрою, що реалізує пропонований спосіб. Спосіб посилення керуючих електричних сигналів полягає в наступному. Відомо, що функція розподілу випадкової величини X з математичним сподіванням Μ і дисперсією s2: ì x - Mü F=í ý = p{X £ x} î s þ (1) де р{X£х} - імовірність того, що випадкова величина X приймає значення, менше чи рівне x. Припустимо, що на випадкову величину X впливають два сигнали: один аддитивно - xа(t), а інший мультипликативно – xm(t). Тоді (1) буде мати вид ìx -Mü F=í ý = p{x m ( t ) X + x a ( t ) £ x} î s þ (2) Тому що ì x - xa (t ) ü p{xm ( t ) X + xa ( t ) £ x} = píX £ ý xm(t ) þ î тоді ì x - Mü ì x(t) - M ü Fam í ý = Fí ý î s þ î s þ (3) дє x - xa (t) x(t) = xm ( t) (4) З (3) випливає, що зміни функції розподілу імовірності випадкової величини, викликані зовнішніми впливами, визначаються функціями розподілу виду ì x( t ) - M ü F=í ý = p{X £ x( t )} î s þ (5) де x(t) - сигнал, що враховує зовнішні впливи на випадкову величину X. Вид функції розподілу імовірностей, обумовлених співвідношенням (5) доказаний на Фіг.1. Порівняння показаної на Фіг.1 характеристики з добре відомими характеристиками, наприклад, електронних підсилювальних елементів дозволяє зробити висновок про те, що при досить великій крутості функції розподілу імовірності відбувається посилення керуючого сигналу, що спостерігається як зміна функції розподілу імовірності випадкової величини. Тому що крутість функції розподілу імовірності визначається співвідношенням d ìx -Mü 1 æ x -M ö Fí ÷ ý = wç dx î s þ s è s ø (6) ì x - Mü í ý s þ дє î - щільність імовірності, то умова здійснення посилення має вид 1 æ x -Mö wç ÷>1 s è s ø (7) Приймаючи до уваги властивості щільностей імовірностей, одержуємо 1 æ x -Mö lim s wç s ÷ = d( x - M) ø è s® 0 (8) де d(x-Μ) - дельта-функція Дірака. З (8) випливає, що при прямуванні дисперсії випадкової величини до нуля крутість функції розподілу імовірності цієї випадкової величини необмежено зростає в точці, що відповідає її математичному сподіванню. Визначимо критичну дисперсію випадкової величини як 2 s s = w 2 ( 0) (9) Тоді, якщо дисперсія випадкової величини менше критичної, то відбувається посилення керуючого сигналу, що спостерігається як зміна функції розподілу імовірності випадкової величини. Тобто прирощування функції розподілу імовірності випадкової величини буде перевищувати прирощування керуючого сигналу, що його викликало. Це підтверджується результатами моделювання процесу посилення при зменшенні дисперсії випадкової величини для випадків рівноймовірного і гаусового розподілів імовірностей (Фіг.2, 3). Якщо кожна Χ1, і=`1,N реалізація з безлічі N реалізацій випадкової величини X перетвориться (квотується за рівнем) відповідно до алгоритму ì1 при X i £ x( t ) ï ui ( t ) = í ï0 при X i > x( t ), i = 1,N î тоді (10) 1 N å ui(t ) N i =1 (11) являє собою незміщену і слушну оцінку функції розподілу імовірності випадкової величини X. Отже, будь-який пристрій, що виконує сукупність перетворень (10), (11) при докритичній дисперсії випадкової величини X, завжди підсилює керуючий сигнал. Співвідношення (10), (11) є основою створення підсилювачів надмалих сигналів, що використовують власні шуми активних підсилювальних елементів. Структурна схема способу показана на Фіг.4. Керуючий 1 і зразковий випадковий 2 електричні сигнали порівнюють за рівнем у блоці порівняння 3 і статистично усереднюють у блоці 4 усереднення. Після усереднення одержують посилений керуючий сигнал 5. що подають у навантаження. Таким чином, потік потужності, що надходить у навантаження, регулюють за допомогою перемінного параметра. Як перемінний параметр використовують імовірність того, що миттєві значення керуючого електричного сигналу 1 не перевищують по величині миттєвих значень зразкового випадкового електричного сигналу 2. Посилення керуючого сигналу 1, спостерігають як зміну функції розподілу імовірності випадкової величини. Тобто прирощування функції розподілу імовірності випадкової величини перевищує прирощування керуючого сигналу, що його викликав. Крім того, як зразковий випадковий електричний сигнал 2 використовують внутрішній шум активного елемента - блоку 3 порівняння, тобто енергію цих шумів для посилення керуючого сигналу. F * (t) = Крім того, результат порівняння, одержуваний у блоці 3, статистично усереднюють за часом у блоці 4. Статистичним усередненням за часом одержують оцінку значень посиленого керуючого сигналу по єдиній його реалізації. Один з можливих варіантів пристрою, що реалізує пропонований спосіб містить послідовно з'єднані компаратор 6, один вхід якого є входом керуючого сигналу 1, а інший вхід - входом зразкового випадкового сигнал) 2, елемент затримки 7, інверсним входом відніматель 8, прямий вхід якого приєднаний до виходу компаратора 6. та інтегратор 9. вихід якого є виходом посиленого керуючого сигналу 5 (Фіг.5). Керуючий електричний сигнал 1, який підлягає посиленню, подається на один із входів компаратора 6, на інший вхід якого надходить зразковий випадковий електричний сигнал 2. Сигнал 2 може формуватися за допомогою генератора шуму, чи може бути використаний внутрішній шум активного елемента компаратора 6, що носить випадковий характер. На виході компаратора 6 виробляється випадковий сигнал порівняння, що відображає імовірність того, що миттєві значення керуючого сигналу 1 не перевищують по величині миттєвих значень зразкового випадкового сигналу 2. Наприклад, якщо миттєві значення керуючого сигналу 1 менше миттєвих значень сигналу 2, то на виході компаратора 6 виробляється високий рівень сигналу, у противному випадку - низький рівень. При цьому, якщо дисперсія випадкової величини менше критичної, то відбувається посилення керуючого сигналу 1, що спостерігається як зміна функції розподілу імовірності випадкової величини. Тобто прирощування функції розподілу імовірності випадкової величини буде перевищувати прирощування керуючого сигналу 1, що його викликало. Сигнал, що знімається з виходу компаратора 6 статистично усереднюється за часом (статистично згладжується), що дозволяє використовувати єдину його реалізацію. Для цього із сигналу, що знімається з виходу компаратора 6, віднімається такий же сигнал, затриманий на час t, а отримана різниця інтегрується за часом. Вибір часу t визначається необхідною точністю оцінки значень керуючого сигналу. Чим більше час t, тим вище точність оцінки. Затримка сигналу здійснюється елементом затримки 7 (наприклад, лінією затримки, регістром, ПЗП, та ін.), вирахування - віднімателем 8 (наприклад, диференціальним підсилювачем), а інтегрування - інтегратором 9 (наприклад, підсилювачем, що інтегрує, RC-ланцюгом, та ін.). При цьому часова затримка г вибирається рівною часу інтегрування інтегратором 9. Сигнал, що знімається з виходу інтегратора 9 надходить у навантаження. Таким чином, спосіб здійснює посилення електричних керуючих і модульованих сигналів. У порівнянні з прототипом пропонований спосіб дозволяє підсилювати керуючі і модульовані сигнали, рівень яких лежить значно нижче рівня власних шумів підсилювальних елементів, використовуючи енергію цих шумів.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for amplifying electric control signals
Автори англійськоюRozorinov Heorhii Mykolaiovych
Назва патенту російськоюСпособ усиления электрических управляющих сигналов
Автори російськоюРозоринов Георгий Николаевич
МПК / Мітки
МПК: H03F 21/00
Мітки: посилення, електричних, спосіб, керуючих, сигналів
Код посилання
<a href="https://ua.patents.su/4-73665-sposib-posilennya-keruyuchikh-elektrichnikh-signaliv.html" target="_blank" rel="follow" title="База патентів України">Спосіб посилення керуючих електричних сигналів</a>
Спосіб аналого-цифрового перетворення електричних сигналів і позиційний код-імпульсний аналого-цифровий перетворювач електричних сигналів
Номер патенту: 42417
Опубліковано: 15.10.2001
Автори: Сташук Леонід Данилович, Сташук Олексій Валерійович, Сташук Вадим Данилович
МПК: G06F 1/00, G06F 5/00, H03K 5/00, G06F 9/00
Мітки: аналого-цифровий, перетворювач, електричних, сигналів, спосіб, аналого-цифрового, перетворення, позиційний, код-імпульсний
Формула / Реферат:
1. Спосіб аналого-цифрового перетворення електричних сигналів, в якому виконують дискретизацію вхідного аналогового сигналу на дискретні у часі амплітудно-імпульсно модульовані (АІМ) у часі відліки, кожен з яких квантують по рівню шляхом його порівняння з фіксованими рівнями квантування, за результатами чого формують цифровий кодований сигнал, відповідний до даного рівня квантування, який відрізняється тим, що отриманий кодований сигнал далі...
Аналізатор керуючих сигналів атс
Номер патенту: 42087
Опубліковано: 15.10.2001
Автори: Денисенко В'ячеслав Платонович, Леонтьєв Олександр Петрович, Кирда Микола Павлович, Семотюк Мирослав Васильович
Мітки: атс, керуючих, сигналів, аналізатор
Формула / Реферат:
1. Аналізатор керуючих сигналів АТС, що містить аналого-цифровий перетворювач, блок пам'яті даних та блок індикації, причому вихід аналого-цифрового перетворювача підключено до інформаційного входу блока пам'яті даних, який відрізняється тим, що в пристрій введені керуючий блок, таймер, блок перетворення Фур'є та блок аналізу, причому вхід приладу підключено до інформаційного входу аналого-цифрового перетворювача, керуючий вхід якого...
Спосіб перетворення часового масштабу пакета імпульсних електричних сигналів
Номер патенту: 49705
Опубліковано: 16.09.2002
Автори: Серков Олександр Анатолійович, Бобер Андрій Григорович, Кавун Марія Олександрівна, Федорович Наталя Володимирівна, Нечитайло Юрій Іванович, Олійник Максим Олексійович
МПК: H03K 5/13
Мітки: перетворення, пакета, імпульсних, сигналів, масштабу, електричних, часового, спосіб
Формула / Реферат:
Спосіб перетворення часового масштабу пакета імпульсних електричних сигналів, при якому пакет сигналів подають на вхід штучної лінії затримки, пропускають сигнал уздовж штучної лінії затримки, передають його на кінцеві пристрої, який відрізняється тим, що параметри штучної лінії затримки змінюють водночас із проходженням пакета імпульсних електричних сигналів.
Прилад для аналізу керуючих сигналів автоматичних телефонних станцій
Номер патенту: 42084
Опубліковано: 15.10.2001
Автори: Денисенко В'ячеслав Платонович, Загоровський Михайло Володимирович, Шершньов Сергій Степанович, Кирда Микола Павлович, Яровой Віктор Петрович, Леонтьєв Олександр Петрович
Мітки: телефонних, сигналів, станцій, керуючих, прилад, автоматичних, аналізу
Формула / Реферат:
1. Прилад для аналізу керуючих сигналів автоматичних телефонних станцій, що містить клавіатуру, аналого-цифровий перетворювач та блок індикації, який відрізняється тим, що в прилад введені блок цифрової фільтрації та аналізу, цифро-аналоговий перетворювач і блок інтерфейсу, причому вхід приладу підключено до входу аналого-цифрового перетворювача, вихід якого підключено до першого входу блока цифрової фільтрації та аналізу, підключеного другим...
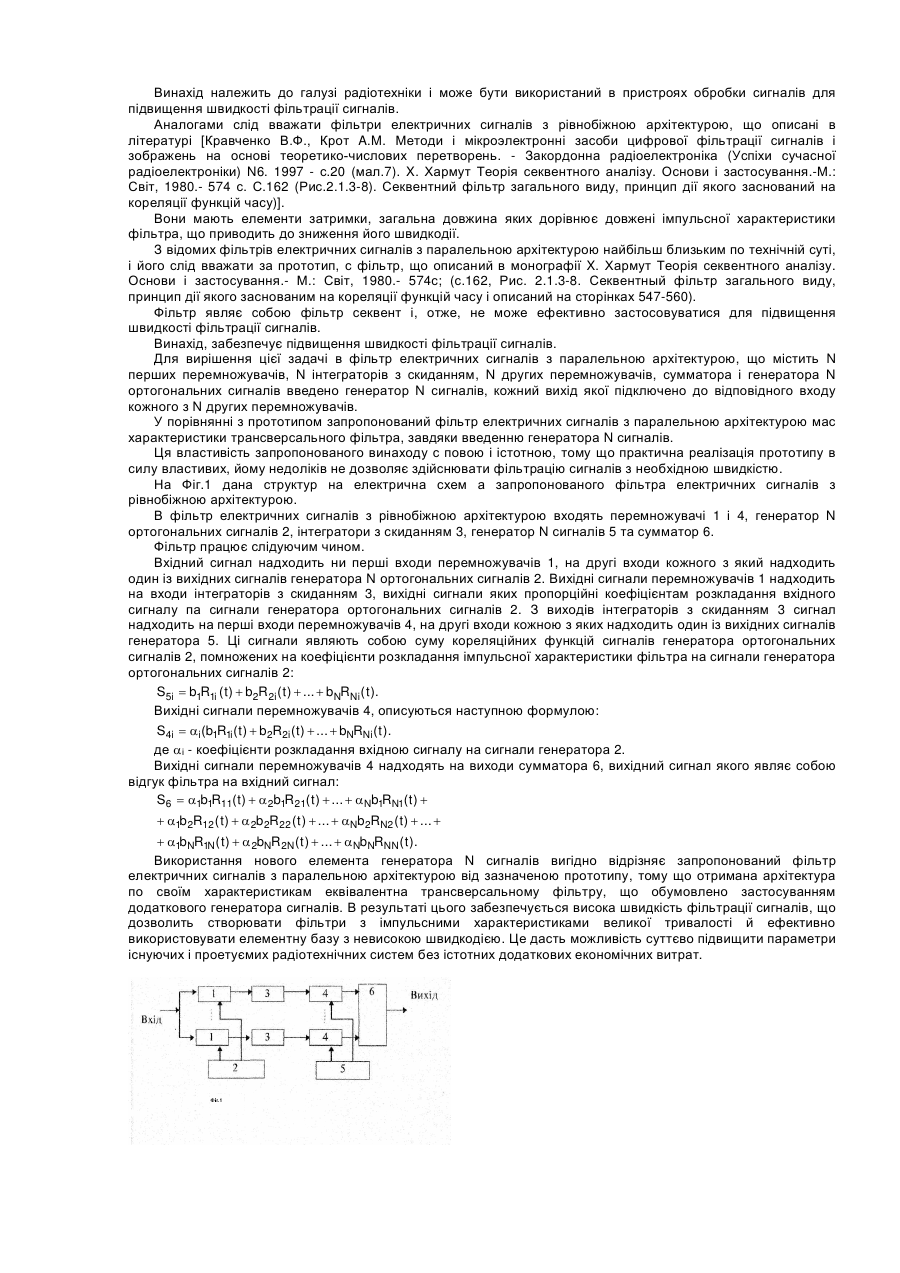
Фільтр електричних сигналів з паралельною архітектурою
Номер патенту: 72457
Опубліковано: 15.03.2005
Автори: Бабуров Едуард Федорович, Дегтярьов Андрій Миколайович
МПК: H03H 15/00
Мітки: архітектурою, фільтр, паралельною, електричних, сигналів
Формула / Реферат:
Фільтр електричних сигналів, що має N перших перемножувачів, N інтеграторів з скиданням, N других перемножувачів, сумматор та генератор N ортогональних сигналів, який відрізняється тим, що в фільтр введено генератор N сигналів, кожний вихід якого підключено до відповідного входу кожного з N других перемножувачів.
Попередній патент: Самозмащувальний композит
Наступний патент: Спосіб діагностики інсулінорезистентності
Випадковий патент: Автомобільний вітрогенератор