Спосіб виправлення цифрових аерокосмічних зображень, спотворених вздовж стовпчиків
Номер патенту: 79127
Опубліковано: 25.05.2007
Автори: Попов Михайло Олексійович, Бушуєв Євген Іванович, Станкевич Сергій Арсенійович
Формула / Реферат
1. Спосіб виправлення цифрових аерокосмічних зображень, спотворених вздовж стовпчиків, за яким обчислюють дискретний Фур'є-образ спотвореного зображення, оцінюють просторово-частотний оператор спотворення, далі обчислюють обернений до просторово-частотного оператора спотворення виправляючий просторово-частотний оператор, який застосовують до дискретного Фур'є-образа спотвореного цифрового аерокосмічного зображення, та виконують виправлення цифрового аерокосмічного зображення шляхом зворотного дискретного перетворення Фур'є (ДПФ) виправленого дискретного Фур'є-образа, який відрізняється тим, що після обчислення дискретного Фур'є-образа спотвореного зображення визначають одновимірні оптичні передавальні функції (ОПФ) спотвореного цифрового аерокосмічного зображення окремо вздовж рядків та стовпчиків зображення, після чого оцінку виправляючого просторово-частотного оператора обчислюють як відношення цих ОПФ, причому в знаменнику ставлять ОПФ вздовж стовпчиків, та цей виправляючий оператор застосовують до кожного стовпчика, отримане таким чином комплексне зображення кожного стовпчика приводять до дійсної форми і далі з них складають виправлене цифрове аерокосмічне зображення.
2. Спосіб за п. 1, який відрізняється тим, що для визначення одновимірних ОПФ вздовж кожного стовпчика та кожного рядка цифрового зображення визначають розподіл імовірності виділення примежових кривих, кожен з них порівнюють із заданим порогом імовірності, з тих примежових кривих, що задовольняють його, формують дві множини примежових кривих, над якими далі виконують операції усереднення та дискретного диференціювання окремо для кожної множини, одновимірні ж ОПФ визначають як результат ДПФ відповідних дискретних похідних.
3. Спосіб за п. 1, який відрізняється тим, що операції з виправлення цифрового зображення виконують послідовно для кожного окремого його фрагмента, який містить кількість рядків, рівну кількості відліків примежової кривої вздовж стовпчика, далі з виправлених фрагментів складають виправлене цифрове аерокосмічне зображення.
Текст
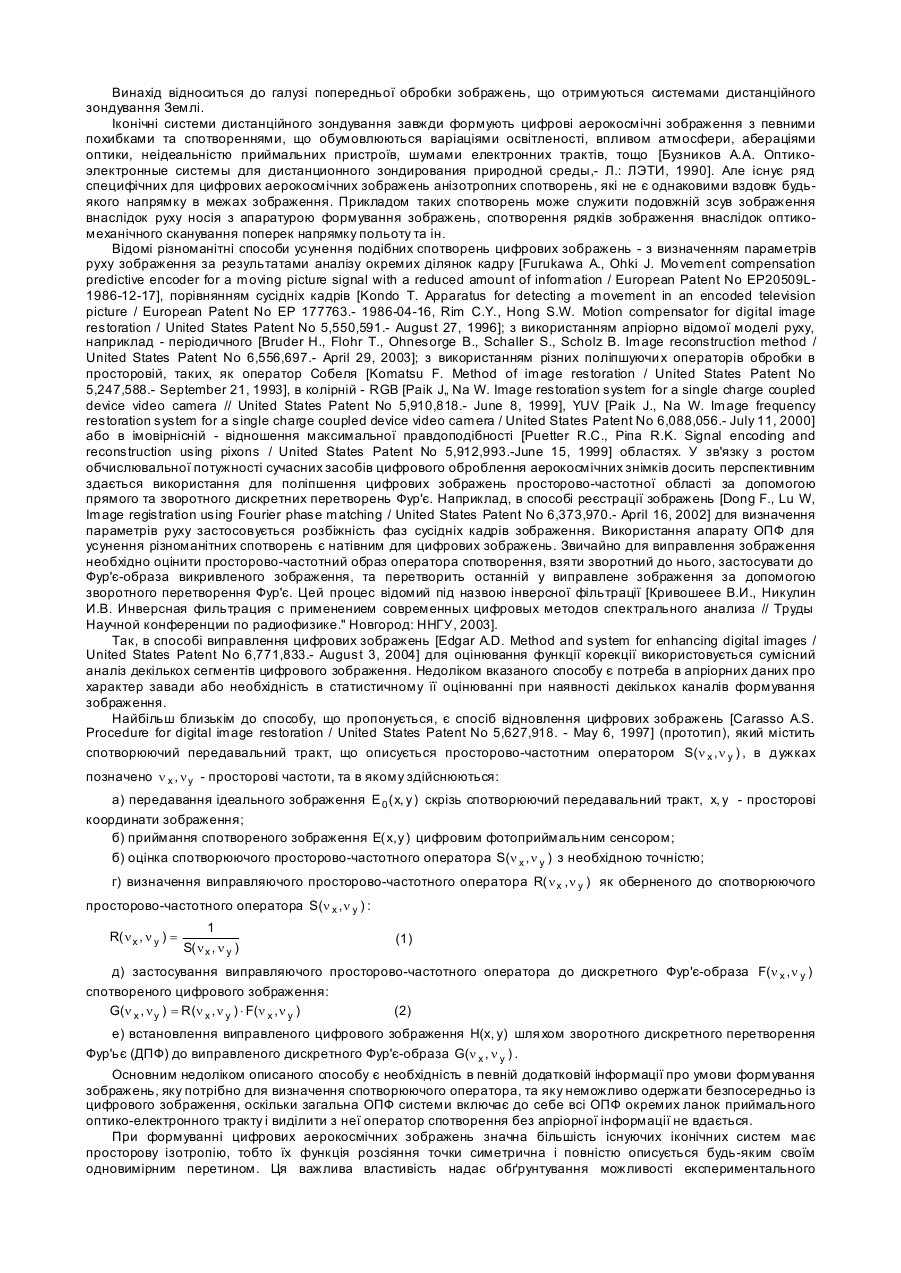
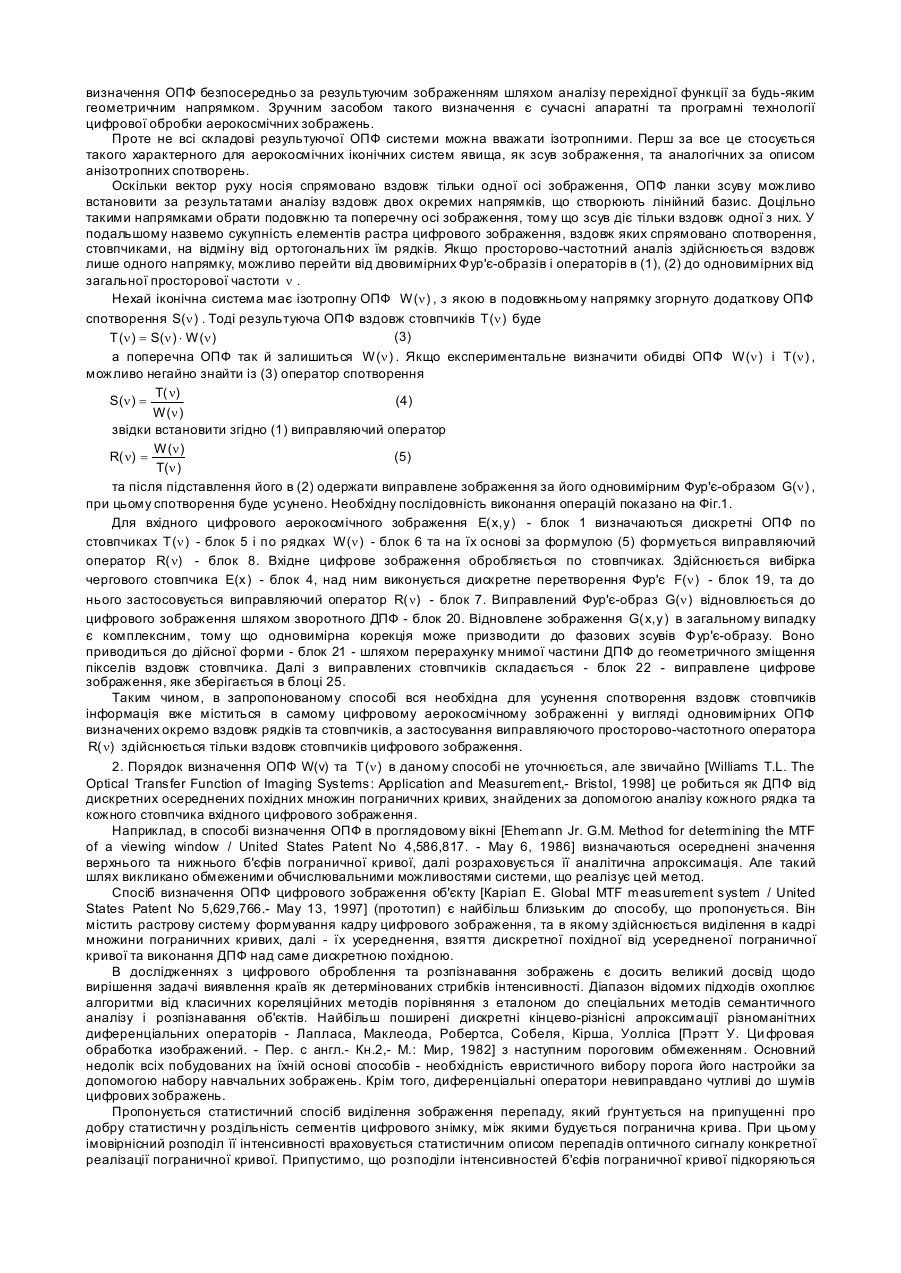
Винахід відноситься до галузі попередньої обробки зображень, що отримуються системами дистанційного зондування Землі. Іконічні системи дистанційного зондування завжди формують цифрові аерокосмічні зображення з певними похибками та спотвореннями, що обумовлюються варіаціями освітленості, впливом атмосфери, абераціями оптики, неідеальністю приймальних пристроїв, шумами електронних трактів, тощо [Бузников А.А. Оптикоэлектронные системы для дистанционного зондирования природной среды,- Л.: ЛЭТИ, 1990]. Але існує ряд специфічних для цифрових аерокосмічних зображень анізотропних спотворень, які не є однаковими вздовж будьякого напрямку в межах зображення. Прикладом таких спотворень може служити подовжній зсув зображення внаслідок руху носія з апаратурою формування зображень, спотворення рядків зображення внаслідок оптикомеханічного сканування поперек напрямку польоту та ін. Відомі різноманітні способи усунення подібних спотворень цифрових зображень - з визначенням параметрів руху зображення за результатами аналізу окремих ділянок кадру [Furukawa A., Ohki J. Mo vement compensation predictive encoder for a moving picture signal with a reduced amount of information / European Patent No EP20509L1986-12-17], порівнянням сусідніх кадрів [Kondo T. Apparatus for detecting a movement in an encoded television picture / European Patent No EP 177763.- 1986-04-16, Rim C.Y., Hong S.W. Motion compensator for digital image restoration / United States Patent No 5,550,591.- August 27, 1996]; з використанням апріорно відомої моделі руху, наприклад - періодичного [Bruder Н., Flohr Т., Ohnesorge В., Schaller S., Scholz В. Image reconstruction method / United States Patent No 6,556,697.- April 29, 2003]; з використанням різних поліпшуючи х операторів обробки в просторовій, таких, як оператор Собеля [Komatsu F. Method of image restoration / United States Patent No 5,247,588.- September 21, 1993], в колірній - RGB [Paik J„ Na W. Image restoration system for a single charge coupled device video camera // United States Patent No 5,910,818.- June 8, 1999], YUV [Paik J., Na W. Image frequency restoration system for a single charge coupled device video camera / United States Patent No 6,088,056.- July 11, 2000] або в імовірнісній - відношення максимальної правдоподібності [Puetter R.C., Ріпа R.K. Signal encoding and reconstruction using pixons / United States Patent No 5,912,993.-June 15, 1999] областях. У зв'язку з ростом обчислювальної потужності сучасних засобів цифрового оброблення аерокосмічних знімків досить перспективним здається використання для поліпшення цифрових зображень просторово-частотної області за допомогою прямого та зворотного дискретних перетворень Фур'є. Наприклад, в способі реєстрації зображень [Dong F., Lu W, Image registration using Fourier phase matching / United States Patent No 6,373,970.- April 16, 2002] для визначення параметрів руху застосовується розбіжність фаз сусідніх кадрів зображення. Використання апарату ОПФ для усунення різноманітних спотворень є натівним для цифрових зображень. Звичайно для виправлення зображення необхідно оцінити просторово-частотний образ оператора спотворення, взяти зворотний до нього, застосувати до Фур'є-образа викривленого зображення, та перетворить останній у виправлене зображення за допомогою зворотного перетворення Фур'є. Цей процес відомий під назвою інверсної фільтрації [Кривошеее В.И., Никулин И.В. Инверсная фильтрация с применением современных цифровых методов спектрального анализа // Труды Научной конференции по радиофизике." Новгород: ННГУ, 2003]. Так, в способі виправлення цифрових зображень [Edgar A.D. Method and system for enhancing digital images / United States Patent No 6,771,833.- August 3, 2004] для оцінювання функції корекції використовується сумісний аналіз декількох сегментів цифрового зображення. Недоліком вказаного способу є потреба в апріорних даних про характер завади або необхідність в статистичному її оцінюванні при наявності декількох каналів формування зображення. Найбільш близькім до способу, що пропонується, є спосіб відновлення цифрових зображень [Carasso A.S. Procedure for digital image restoration / United States Patent No 5,627,918. - May 6, 1997] (прототип), який містить спотворюючий передавальний тракт, що описується просторово-частотним оператором S(n x , n y ) , в дужках позначено n x , n y - просторові частоти, та в якому здійснюються: а) передавання ідеального зображення E 0 ( x, y ) скрізь спотворюючий передавальний тракт, x, y - просторові координати зображення; б) приймання спотвореного зображення E( x, y ) цифровим фотоприймальним сенсором; б) оцінка спотворюючого просторово-частотного оператора S(n x , n y ) з необхідною точністю; г) визначення виправляючого просторово-частотного оператора R( n x , n y ) як оберненого до спотворюючого просторово-частотного оператора S(n x , n y ) : R( n x , n y ) = 1 S( n x , n y ) (1) д) застосування виправляючого просторово-частотного оператора до дискретного Фур'є-образа F(n x , n y ) спотвореного цифрового зображення: G(n x , n y ) = R (n x , n y ) × F(n x , n y ) (2) е) встановлення виправленого цифрового зображення H(x, y) шля хом зворотного дискретного перетворення Фур'ьє (ДПФ) до виправленого дискретного Фур'є-образа G(n x , n y ) . Основним недоліком описаного способу є необхідність в певній додатковій інформації про умови формування зображень, яку потрібно для визначення спотворюючого оператора, та яку неможливо одержати безпосередньо із цифрового зображення, оскільки загальна ОПФ системи включає до себе всі ОПФ окремих ланок приймального оптико-електронного тракту і виділити з неї оператор спотворення без апріорної інформації не вдається. При формуванні цифрових аерокосмічних зображень значна більшість існуючих іконічних систем має просторову ізотропію, тобто їх функція розсіяння точки симетрична і повністю описується будь-яким своїм одновимірним перетином. Ця важлива властивість надає обґрунтування можливості експериментального визначення ОПФ безпосередньо за результуючим зображенням шляхом аналізу перехідної функції за будь-яким геометричним напрямком. Зручним засобом такого визначення є сучасні апаратні та програмні технології цифрової обробки аерокосмічних зображень. Проте не всі складові результуючої ОПФ системи можна вважати ізотропними. Перш за все це стосується такого характерного для аерокосмічних іконічних систем явища, як зсув зображення, та аналогічних за описом анізотропних спотворень. Оскільки вектор руху носія спрямовано вздовж тільки одної осі зображення, ОПФ ланки зсуву можливо встановити за результатами аналізу вздовж двох окремих напрямків, що створюють лінійний базис. Доцільно такими напрямками обрати подовжню та поперечну осі зображення, тому що зсув діє тільки вздовж одної з них. У подальшому назвемо сукупність елементів растра цифрового зображення, вздовж яких спрямовано спотворення, стовпчиками, на відміну від ортогональних їм рядків. Якщо просторово-частотний аналіз здійснюється вздовж лише одного напрямку, можливо перейти від двовимірних Фур'є-образів і операторів в (1), (2) до одновимірних від загальної просторової частоти n . Нехай іконічна система має ізотропну ОПФ W (n ) , з якою в подовжньому напрямку згорнуто додаткову ОПФ спотворення S(n ) . Тоді результуюча ОПФ вздовж стовпчиків T (n ) буде (3) T (n ) = S (n ) × W (n ) а поперечна ОПФ так й залишиться W (n ) . Якщо експериментальне визначити обидві ОПФ W (n ) і T (n ) , можливо негайно знайти із (3) оператор спотворення T( n) S(n ) = (4) W (n ) звідки встановити згідно (1) виправляючий оператор W (n ) R( n) = (5) T(n ) та після підставлення його в (2) одержати виправлене зображення за його одновимірним Фур'є-образом G(n ) , при цьому спотворення буде усунено. Необхідну послідовність виконання операцій показано на Фіг.1. Для вхідного цифрового аерокосмічного зображення E( x, y ) - блок 1 визначаються дискретні ОПФ по стовпчиках T (n ) - блок 5 і по рядках W (n ) - блок 6 та на їх основі за формулою (5) формується виправляючий оператор R( n) - блок 8. Вхідне цифрове зображення обробляється по стовпчиках. Здійснюється вибірка чергового стовпчика E(x ) - блок 4, над ним виконується дискретне перетворення Фур'є F(n ) - блок 19, та до нього застосовується виправляючий оператор R( n) - блок 7. Виправлений Фур'є-образ G(n ) відновлюється до цифрового зображення шляхом зворотного ДПФ - блок 20. Відновлене зображення G( x, y ) в загальному випадку є комплексним, тому що одновимірна корекція може призводити до фазових зсувів Фур'є-образу. Воно приводиться до дійсної форми - блок 21 - шляхом перерахунку мнимої частини ДПФ до геометричного зміщення пікселів вздовж стовпчика. Далі з виправлених стовпчиків складається - блок 22 - виправлене цифрове зображення, яке зберігається в блоці 25. Таким чином, в запропонованому способі вся необхідна для усунення спотворення вздовж стовпчиків інформація вже міститься в самому цифровому аерокосмічному зображенні у вигляді одновимірних ОПФ визначених окремо вздовж рядків та стовпчиків, а застосування виправляючого просторово-частотного оператора R( n) здійснюється тільки вздовж стовпчиків цифрового зображення. 2. Порядок визначення ОПФ W(v) та T (n ) в даному способі не уточнюється, але звичайно [Williams T.L. The Optical Transfer Function of Imaging Systems: Application and Measurement,- Bristol, 1998] це робиться як ДПФ від дискретних осереднених похідних множин пограничних кривих, знайдених за допомогою аналізу кожного рядка та кожного стовпчика вхідного цифрового зображення. Наприклад, в способі визначення ОПФ в проглядовому вікні [Ehemann Jr. G.M. Method for determining the MTF of a viewing window / United States Patent No 4,586,817. - May 6, 1986] визначаються осереднені значення верхнього та нижнього б'єфів пограничної кривої, далі розраховується її аналітична апроксимація. Але такий шлях викликано обмеженими обчислювальними можливостями системи, що реалізує цей метод. Спосіб визначення ОПФ цифрового зображення об'єкту [Каріап Е. Global MTF measurement system / United States Patent No 5,629,766.- May 13, 1997] (прототип) є найбільш близьким до способу, що пропонується. Він містить растрову систему формування кадру цифрового зображення, та в якому здійснюється виділення в кадрі множини пограничних кривих, далі - їх усереднення, взяття дискретної похідної від усередненої пограничної кривої та виконання ДПФ над саме дискретною похідною. В дослідженнях з цифрового оброблення та розпізнавання зображень є досить великий досвід щодо вирішення задачі виявлення країв як детермінованих стрибків інтенсивності. Діапазон відомих підходів охоплює алгоритми від класичних кореляційних методів порівняння з еталоном до спеціальних методів семантичного аналізу і розпізнавання об'єктів. Найбільш поширені дискретні кінцево-різнісні апроксимації різноманітних диференціальних операторів - Лапласа, Маклеода, Робертса, Собеля, Кірша, Уолліса [Прэтт У. Ци фровая обработка изображений. - Пер. с англ.- Кн.2,- М.: Мир, 1982] з наступним пороговим обмеженням. Основний недолік всіх побудованих на їхній основі способів - необхідність евристичного вибору порога його настройки за допомогою набору навчальних зображень. Крім того, диференціальні оператори невиправдано чутливі до шумів цифрових зображень. Пропонується статистичний спосіб виділення зображення перепаду, який ґрунтується на припущенні про добру статистичн у роздільність сегментів цифрового знімку, між якими будується погранична крива. При цьому імовірнісний розподіл її інтенсивності враховується статистичним описом перепадів оптичного сигналу конкретної реалізації пограничної кривої. Припустимо, що розподіли інтенсивностей б'єфів пограничної кривої підкоряються 2 нормальному, закону з математичними очікуваннями m1 і m 2 та дисперсіями s 1 і s 2 відповідно. В цьому разі 2 імовірність правильного розділення б'єфів P12 запишеться як P12 = 1- P1 × e 1 - P2 × e 2 де (6) æ Dm æ Dm x 12 ö x 12 ö та ç ÷ ÷ e1 = Ф * ç ç Ds + s ÷ - Ф * ç s +s + s ÷ 1 ø 1 ø è è 1 2 æ Dm æ Dm x 12 ö x 12 ö ç ÷ ÷ e2 = Ф * ç ç Ds + s ÷ - Ф * ç s +s + s ÷ 2 ø 1 2 2 ø è è (7) умовні імовірності помилкової класифікації б'єфів, P1 та P2 - апріорні імовірності б'єфів, Dm = m 2 - m1 , Ds = s 2 - s 1 , Ф * (×) - таблична функція Лапласа, x12 = æs lnç 2 çs è 1 Dm æ Dm + ç ç s ×s s1 × s2 è 1 2 ö ÷ ÷ ø ö æs ÷ - lnç 2 ÷ çs ø è 1 2 ö æ 1 1 ÷ ×ç ÷ ç 2 - 2 ø è s1 s2 ö ÷ ÷ ø (8) поправка, обумовлена різницею дисперсій нормальних розподілів інтенсивності б'єфів. Співвідношення (6) перетворює кожну точку сегмента цифрового зображення, що аналізується, в імовірність безпомилкового розділення верхнього та нижнього б'єфів погранично!' кривої вздовж обраного напрямку. Очевидно, що чим вище ця імовірність, тим краще якість даної реалізації пограничної кривої, бо погранична крива, за визначенням, відображає ідеальний детермінований стрибок сигналу. Крім того, імовірнісне перетворення в неявній формі враховує вплив на якість цифрового знімку привнесених шумів. Й нарешті, головною перевагою імовірнісного перетворення є осмисленість вихідний величини P12 , що легко та витончено знімає проблему вибору порога при виділенні значущих перепадів: вони обираються виходячи з необхідного рівня вірогідності, як правило, в межах Р12=0,8...0,95. Необхідну послідовність виконання операцій показано на Фіг.2. Блоки 9, 11, 13, 15, 17 деталізують блок 5 способу п. 1, а блоки 10, 12, 14, 16, 18 - блок 6 відповідно. Для вхідного цифрового зображення - блок 1 задається досить великий поріг імовірності P0 - блок 2. Для кожного піксела за формулою (6) визначаються розподіли імовірності виділення пограничних кривих вздовж стовпчику P(x ) - блок 9 та вздовж рядку P(y ) - блок 10. З одержаних множин імовірностей виділяються ті, що перевищують поріг окремо для стовпчиків - блок 11 та рядків блок 12. Відповідні їм пограничні криві усереднюються A(x ) - по стовпчиках - блок 13 та A(y ) - по рядках - блок 14. Далі вони дискретно диференціюються - блоки 15, 16 та зазнають ДПФ - блоки 17, 18, що й призводить до формування дискретних ОПФ по стовпчиках T (n ) і по рядках W (n ) , які далі використовуються для визначення відновлюючого оператора R( n) - блок 8. Таким чином, запропонований спосіб не потребує додаткового попереднього оброблення цифрового зображення та надає безпосередню оцінку імовірності виділення пограничної кривої для кожного піксела, що суттєво підвищує якість аналізу. 3. Але й цей спосіб має певний недолік, а саме - неможливість здійснювати оброблення цифрового аерокосмічного зображення в масштабі часу, близькому до реального, безпосередньо в процесі його формування іконічною системою дистанційного зондування. Авжеж, викладений перелік операцій способу ніяк не потребує одночасного оброблення всього цифрового зображення. Єдиним обмеженням на розмір сегменту цифрового зображення, який може оброблятися окремо від інших, є розмір вхідної вибірки пограничної кривої. Цей розмір звичайно обирається невеликим, 8...32 пікселі, тому оброблення може здійснюватися невеличкими блоками послідовно або паралельно - з метою прискорення. Особливостями ж формування переважної більшості сучасних аерокосмічних цифрових зображень є послідовне одержання рядків зображення синхронно з подовжнім переміщенням носія за рахунок власного руху [Fritz L.W. High Resolution Commercial Remote Sensing Satellites and Spatial Information Systems // International Society for Photogrammetry and Remote Sensing (ISPRS).- Rockville: LMC, 2003]. Спосіб, що пропонується, передбачає тимчасове накопичення в буфері такої кількості рядків, що дорівнює кількості відліків пограничної кривої вздовж стовпчиків цифрового зображення, та оброблення чергового буферу з їх послідовності безпосередньо одразу після завершення його формування, не дочікуючись формування всього зображення цілком. Необхідна послідовність виконання операцій описується Фіг.3. За нею вхідне цифрове аерокосмічне зображення E( x, y ) - блок 1 обробляється по невеликих фрагментах, які містять кількість рядків не меншу за необхідне число відліків погранично!' кривої. Вибірка вхідних фрагментів - блок 23, та складання виправлених фрагментів - блок 24 здійснюється поступово із зміщенням на один рядок. Виправлення буферу - блок 3 виконується за способом п. 1 і п. 2, тобто блок З узагальнює блоки 4-8 і 19-22 Фіг.1. Таким чином, в способі запропоновано послідовне посегментне оброблення цифрового аерокосмічного зображення, що надає змогу виправлення цифрових аерокосмічних зображень безпосередньо в процесі їхнього формування на борту носія апаратури дистанційного зондування в масштабі часу, близькому до реального.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for correcting a digital aerospace picture with distortions in the columns of the picture elements
Автори англійськоюPopov Mykhailo Oleksiiovych, Stankevych Serhii Arseniiovych, Bushuiev Yevhen Ivanovych
Назва патенту російськоюСпособ исправления цифрового аэрокосмического изображения с искажениями в столбцах элементов изображения
Автори російськоюПопов Михаил Алексеевич, Станкевич Сергей Арсентиевич, Бушуев Евгений Иванович
МПК / Мітки
Мітки: спотворених, спосіб, зображень, аерокосмічних, вздовж, стовпчиків, виправлення, цифрових
Код посилання
<a href="https://ua.patents.su/4-79127-sposib-vipravlennya-cifrovikh-aerokosmichnikh-zobrazhen-spotvorenikh-vzdovzh-stovpchikiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб виправлення цифрових аерокосмічних зображень, спотворених вздовж стовпчиків</a>
Спосіб тематичного дешифрування аерокосмічних зображень
Номер патенту: 65757
Опубліковано: 10.05.2007
Автори: Федоровський Олександр Дмитрович, Якимчук Владислав Григорович
МПК: G06F 17/00, G06K 9/00
Мітки: тематичного, зображень, аерокосмічних, дешифрування, спосіб
Формула / Реферат:
Спосіб тематичного дешифрування аерокосмічних зображень об'єктів, при якому для об'єктів заданих класів, що підлягають дешифруванню, заздалегідь формують апріорний список допустимих значень морфометричних показників місцевості, вибирають аркуш цифрової карти місцевості (ЦКМ), що вміщує зображену ділянку місцевості, прив'язують до нього зображення, яке дешифрується, та зчитують з вибраного аркуша ЦКМ реальні значення морфометричних показників,...
Спосіб тематичного дешифрування аерокосмічних зображень
Номер патенту: 56774
Опубліковано: 15.03.2006
Автори: Попов Михайло Олексійович, Порхун Олексій Анатолійович
МПК: G06K 9/64
Мітки: аерокосмічних, зображень, тематичного, дешифрування, спосіб
Формула / Реферат:
Спосіб очищення ґрунтів, забруднених нафтою, що включає механічну підготовку ґрунту, поливання і висадку рослин, який відрізняється тим, що попередньо викопують з екологічно чистих територій кореневища осоки шершавої (Carex hirta) з грудкою ґрунту, запаковують у розмокаючі пакети, і вносять у ґрунт з розрахунку 16 шт/м2 протягом календарного року.
Пристрій для отримання цифрових зображень гістологічних мікропрепаратів
Номер патенту: 12557
Опубліковано: 15.02.2006
Автори: Федонюк Лариса Ярославівна, Ходоровська Алла Анатоліївна, Ходоровський Володимир Михайлович, Коломоєць Михайло Юрійович
МПК: G03G 17/00
Мітки: отримання, гістологічних, мікропрепаратів, зображень, пристрій, цифрових
Формула / Реферат:
Пристрій для отримання цифрових зображень мікропрепаратів, що складається з мікроскопа та фіксуючого пристрою, який відрізняється тим, що як фіксуючий пристрій використовують цифрову фотокамеру, яка з'єднана із тубусом мікроскопа через насадку-перехідник.
Система та машина (варіанти) для перенесення цифрових зображень на носій зображення, або ж навпаки
Номер патенту: 66780
Опубліковано: 15.06.2004
Автори: Водопівець Йозеф, Фумо Чезаре
МПК: G03F 7/20
Мітки: зображення, зображень, система, перенесення, машина, цифрових, носій, варіанти, навпаки
Формула / Реферат:
1. Система для перенесення цифрових зображень з комп'ютера (S) на необов'язково світлочутливий матеріал-носій зображення 3, або ж навпаки, яка використовує точкові джерела світла, яка відрізняється тим, що вона включає в себе плоску активаційну пластину 1 з експонувальними засобами або детекторами для зазначеного матеріалу-носія зображення 3, яка має множину (n) джерел світла - точкових експонувальних засобів або детекторів 11, фіксовано...
Спосіб одержання додаткових зональних зображень багатозонального цифрового аерокосмічного знімка
Номер патенту: 75299
Опубліковано: 15.03.2006
Автори: Станкевич Сергій Арсенійович, Мосов Сергій Петрович, Волошин В'ячеслав Іванович, Попов Михайло Олексійович
Мітки: додаткових, зображень, багатозонального, аерокосмічного, знімка, цифрового, зональних, спосіб, одержання
Формула / Реферат:
Спосіб одержання додаткових зональних зображень багатозонального цифрового аерокосмічного знімка, при якому одержують функції спектральної чутливості першого та другого із існуючих зональних каналів багатозонального цифрового аерокосмічного знімка, визначають значення сигналів пікселів у кожному зональному каналі багатозонального цифрового зображення, застосовують вказане значення до кожного піксела кожного зонального каналу, який...
Попередній патент: Спосіб та установка для одержання аміаку із синтез-газу
Наступний патент: Оптико-електронний спосіб надлишкових вимірювань концентрації пилу
Випадковий патент: Спосіб прогнозування зрощення перелому