Система автоматичного регулювання

Формула / Реферат
Система автоматичного регулювання, що містить елемент порівняння, перший вхід якого є входом системи, регулюючий пристрій, вхід якого з'єднаний з виходом елемента порівняння, виконавчий пристрій, вихід якого з'єднаний з входом об'єкта регулювання, об'єкт регулювання, вихід якого з'єднаний з входом датчика вихідної змінної об'єкта регулювання, яка відрізняється тим, що систему забезпечено пристроєм логарифмування, вхід якого з'єднаний з виходом датчика вихідної змінної об'єкта регулювання, а вихід з'єднаний з другим входом елемента порівняння, також систему забезпечено пристроєм експоненціальної функції ехр(Хlnрп), вхід якого з'єднаний з виходом регулюючого пристрою, а вихід з'єднаний з входом виконавчого пристрою.
Текст
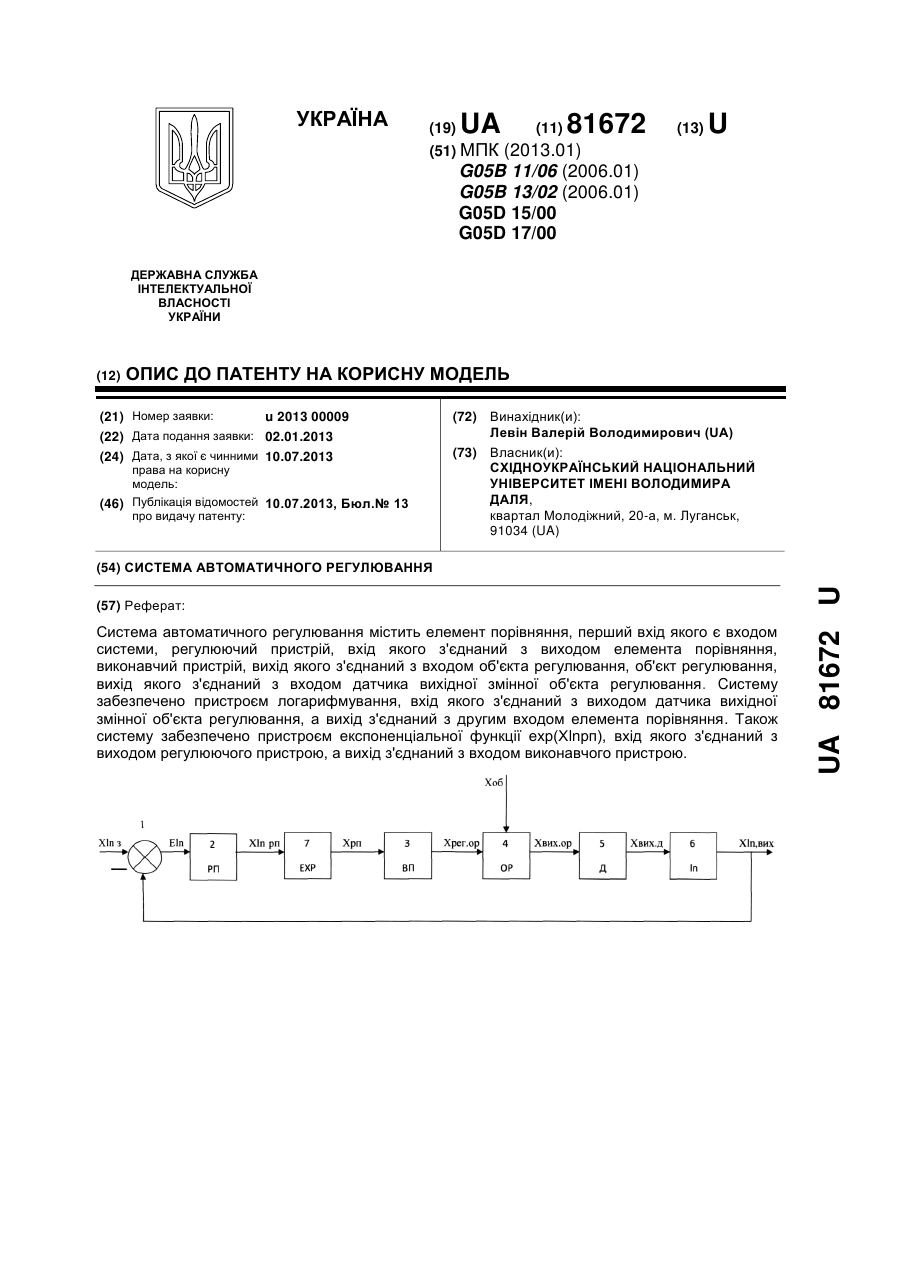
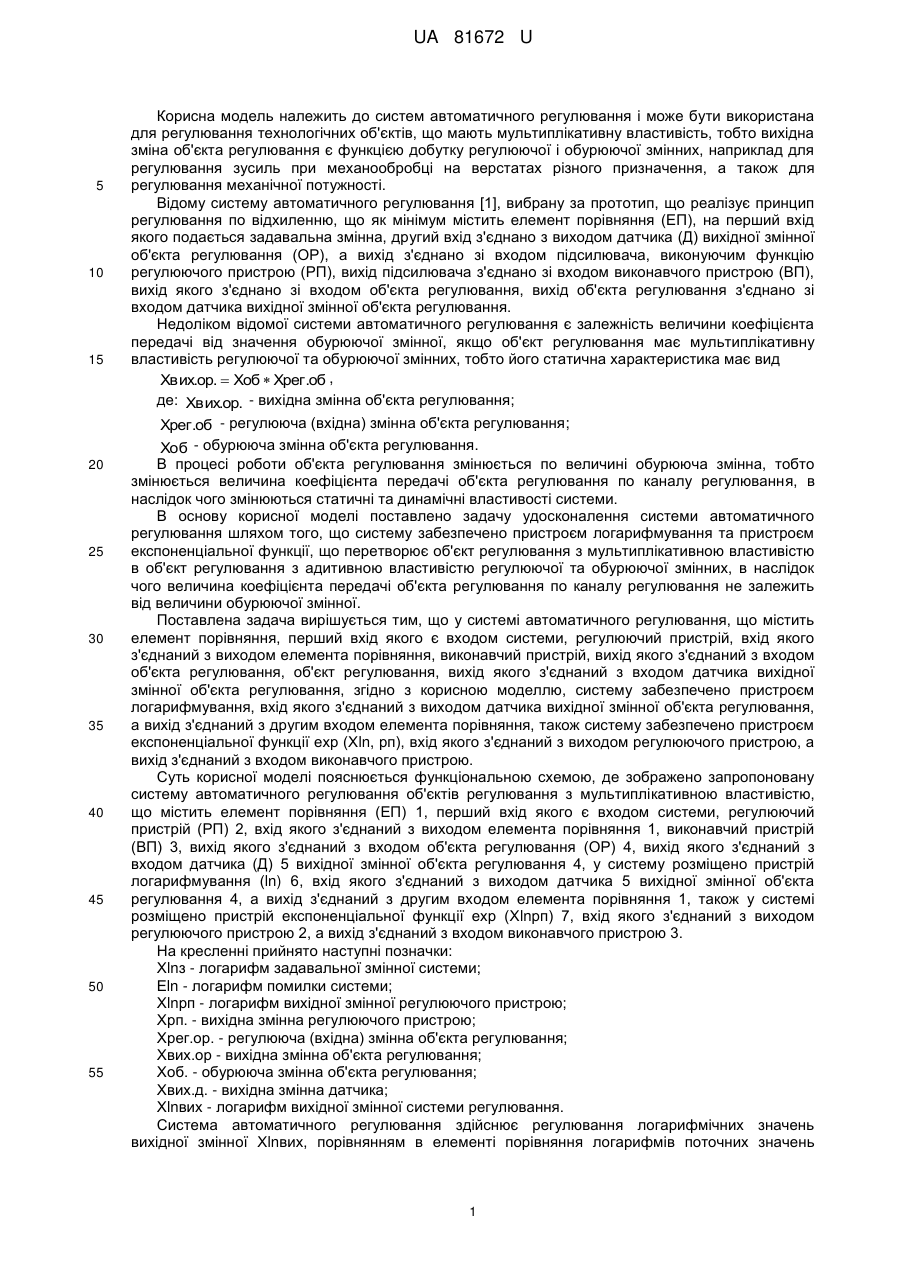
Реферат: Система автоматичного регулювання містить елемент порівняння, перший вхід якого є входом системи, регулюючий пристрій, вхід якого з'єднаний з виходом елемента порівняння, виконавчий пристрій, вихід якого з'єднаний з входом об'єкта регулювання, об'єкт регулювання, вихід якого з'єднаний з входом датчика вихідної змінної об'єкта регулювання. Cистему забезпечено пристроєм логарифмування, вхід якого з'єднаний з виходом датчика вихідної змінної об'єкта регулювання, а вихід з'єднаний з другим входом елемента порівняння. Також систему забезпечено пристроєм експоненціальної функції ехр(Хlnрп), вхід якого з'єднаний з виходом регулюючого пристрою, а вихід з'єднаний з входом виконавчого пристрою. UA 81672 U (54) СИСТЕМА АВТОМАТИЧНОГО РЕГУЛЮВАННЯ UA 81672 U UA 81672 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до систем автоматичного регулювання і може бути використана для регулювання технологічних об'єктів, що мають мультиплікативну властивість, тобто вихідна зміна об'єкта регулювання є функцією добутку регулюючої і обурюючої змінних, наприклад для регулювання зусиль при механообробці на верстатах різного призначення, а також для регулювання механічної потужності. Відому систему автоматичного регулювання [1], вибрану за прототип, що реалізує принцип регулювання по відхиленню, що як мінімум містить елемент порівняння (ЕП), на перший вхід якого подається задавальна змінна, другий вхід з'єднано з виходом датчика (Д) вихідної змінної об'єкта регулювання (ОР), а вихід з'єднано зі входом підсилювача, виконуючим функцію регулюючого пристрою (РП), вихід підсилювача з'єднано зі входом виконавчого пристрою (ВП), вихід якого з'єднано зі входом об'єкта регулювання, вихід об'єкта регулювання з'єднано зі входом датчика вихідної змінної об'єкта регулювання. Недоліком відомої системи автоматичного регулювання є залежність величини коефіцієнта передачі від значення обурюючої змінної, якщо об'єкт регулювання має мультиплікативну властивість регулюючої та обурюючої змінних, тобто його статична характеристика має вид Хвих.ор. Хоб Хрег .об , де: Хвих.ор. - вихідна змінна об'єкта регулювання; Хрег .об - регулююча (вхідна) змінна об'єкта регулювання; Хоб - обурююча змінна об'єкта регулювання. В процесі роботи об'єкта регулювання змінюється по величині обурююча змінна, тобто змінюється величина коефіцієнта передачі об'єкта регулювання по каналу регулювання, в наслідок чого змінюються статичні та динамічні властивості системи. В основу корисної моделі поставлено задачу удосконалення системи автоматичного регулювання шляхом того, що систему забезпечено пристроєм логарифмування та пристроєм експоненціальної функції, що перетворює об'єкт регулювання з мультиплікативною властивістю в об'єкт регулювання з адитивною властивістю регулюючої та обурюючої змінних, в наслідок чого величина коефіцієнта передачі об'єкта регулювання по каналу регулювання не залежить від величини обурюючої змінної. Поставлена задача вирішується тим, що у системі автоматичного регулювання, що містить елемент порівняння, перший вхід якого є входом системи, регулюючий пристрій, вхід якого з'єднаний з виходом елемента порівняння, виконавчий пристрій, вихід якого з'єднаний з входом об'єкта регулювання, об'єкт регулювання, вихід якого з'єднаний з входом датчика вихідної змінної об'єкта регулювання, згідно з корисною моделлю, систему забезпечено пристроєм логарифмування, вхід якого з'єднаний з виходом датчика вихідної змінної об'єкта регулювання, а вихід з'єднаний з другим входом елемента порівняння, також систему забезпечено пристроєм експоненціальної функції ехр (Хln, рп), вхід якого з'єднаний з виходом регулюючого пристрою, а вихід з'єднаний з входом виконавчого пристрою. Суть корисної моделі пояснюється функціональною схемою, де зображено запропоновану систему автоматичного регулювання об'єктів регулювання з мультиплікативною властивістю, що містить елемент порівняння (ЕП) 1, перший вхід якого є входом системи, регулюючий пристрій (РП) 2, вхід якого з'єднаний з виходом елемента порівняння 1, виконавчий пристрій (ВП) 3, вихід якого з'єднаний з входом об'єкта регулювання (ОР) 4, вихід якого з'єднаний з входом датчика (Д) 5 вихідної змінної об'єкта регулювання 4, у систему розміщено пристрій логарифмування (ln) 6, вхід якого з'єднаний з виходом датчика 5 вихідної змінної об'єкта регулювання 4, а вихід з'єднаний з другим входом елемента порівняння 1, також у системі розміщено пристрій експоненціальної функції ехр (Хlnрп) 7, вхід якого з'єднаний з виходом регулюючого пристрою 2, а вихід з'єднаний з входом виконавчого пристрою 3. На кресленні прийнято наступні позначки: Хlnз - логарифм задавальної змінної системи; Еln - логарифм помилки системи; Хlnрп - логарифм вихідної змінної регулюючого пристрою; Хрп. - вихідна змінна регулюючого пристрою; Хрег.ор. - регулююча (вхідна) змінна об'єкта регулювання; Хвих.ор - вихідна змінна об'єкта регулювання; Хоб. - обурююча змінна об'єкта регулювання; Хвих.д. - вихідна змінна датчика; Хlnвих - логарифм вихідної змінної системи регулювання. Система автоматичного регулювання здійснює регулювання логарифмічних значень вихідної змінної Хlnвих, порівнянням в елементі порівняння логарифмів поточних значень 1 UA 81672 U 5 10 Хlnвих, з логарифмом поточних значень задавальної змінної Хlnз, і в залежності від значення логарифма помилки регулювання Еln, регулюючий пристрій (РП) формує по визначеному закону логарифм регулюючої змінної Хlnрп, котра експоненціальним пристроєм і виконавчим пристроєм (ВП) перетворюється у відповідну регулюючу змінну Хрег.ор. об'єкта регулювання. Таким чином, здійснення регулювання об'єкта регулювання вn логарифмічних координатах перетворює мультиплікативні властивості об'єкта регулювання в адитивні, що робить незалежними параметри системи по каналу регулювання від обурюючої змінної. Джерело інформації: 1. Н.Н. Иващенко автоматическое регулирование. Теория и элементы системы. - М.: "Машиностроение", 1978.-736 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Система автоматичного регулювання, що містить елемент порівняння, перший вхід якого є входом системи, регулюючий пристрій, вхід якого з'єднаний з виходом елемента порівняння, виконавчий пристрій, вихід якого з'єднаний з входом об'єкта регулювання, об'єкт регулювання, вихід якого з'єднаний з входом датчика вихідної змінної об'єкта регулювання, яка відрізняється тим, що систему забезпечено пристроєм логарифмування, вхід якого з'єднаний з виходом датчика вихідної змінної об'єкта регулювання, а вихід з'єднаний з другим входом елемента порівняння, також систему забезпечено пристроєм експоненціальної функції ехр(Хlnрп), вхід якого з'єднаний з виходом регулюючого пристрою, а вихід з'єднаний з входом виконавчого пристрою. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic control system
Автори англійськоюLevin Valerii Volodymyrovych
Назва патенту російськоюСистема автоматического регулирования
Автори російськоюЛевин Валерий Владимирович
МПК / Мітки
МПК: G05B 13/02, G05D 17/00, G05D 15/00, G05B 11/06
Мітки: система, автоматичного, регулювання
Код посилання
<a href="https://ua.patents.su/4-81672-sistema-avtomatichnogo-regulyuvannya.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного регулювання</a>
Система автоматичного регулювання швидкості конвеєра
Номер патенту: 68011
Опубліковано: 12.03.2012
Автори: Піменов Геннадій Олександрович, Рутберг Леонід Наумович, Резніков Станіслав Юрійович, Дубинкин Віктор Трохимович
МПК: B65G 43/08
Мітки: автоматичного, швидкості, конвеєра, система, регулювання
Формула / Реферат:
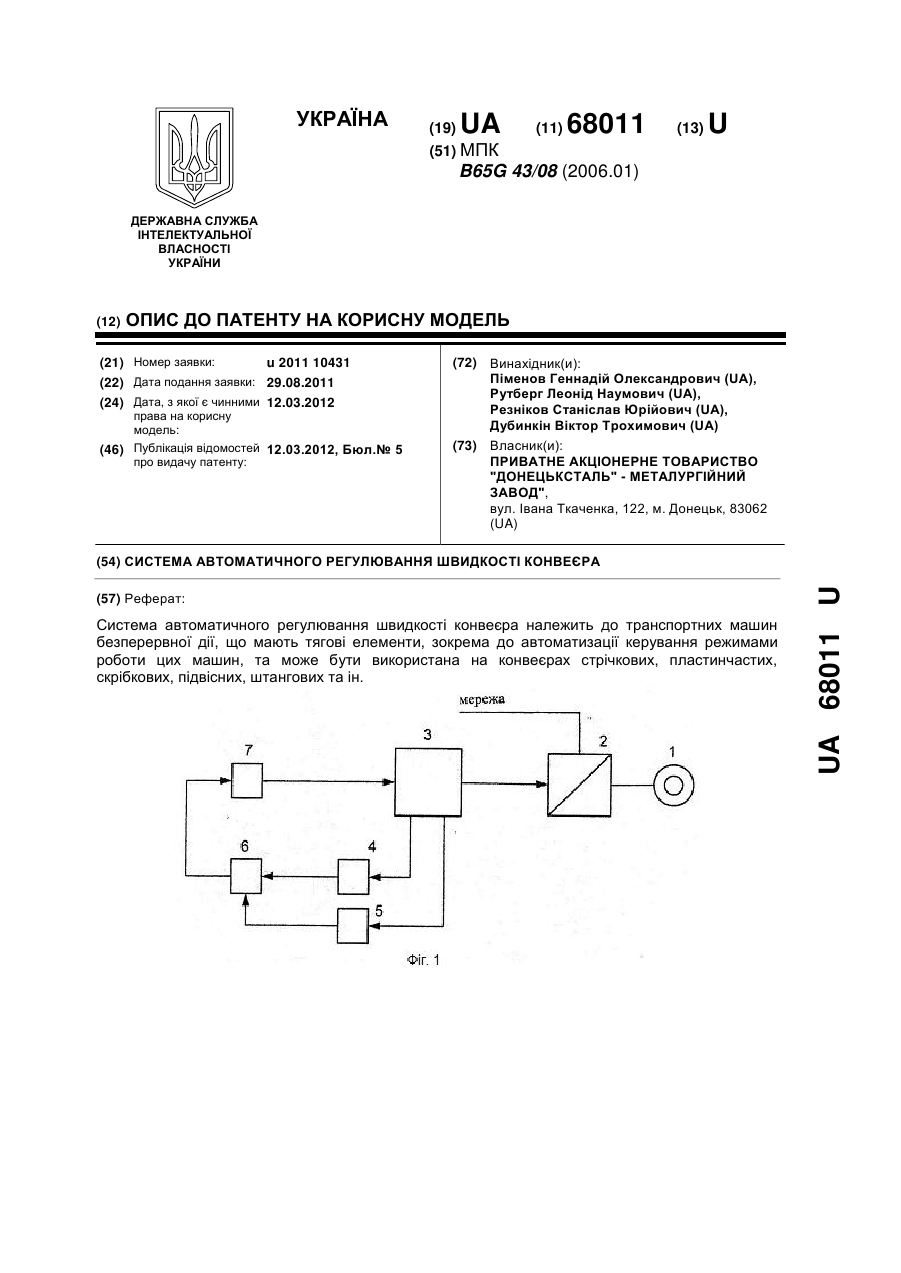
1. Система автоматичного регулювання швидкості конвеєра, що містить канал регулювання по навантаженню, який включає привід тягового елемента конвеєра, що складається з електроприводу та привідного барабана, яка відрізняється тим, що електропривід конвеєра виконаний частотно-керованим, а система автоматичного регулювання швидкості виконана замкненою, при цьому електропривід складається з перетворювача частоти та підключеного до його виходу...
Система комбінованого автоматичного регулювання об’єкта з великим часом запізнювання
Номер патенту: 100798
Опубліковано: 25.01.2013
Автори: Мінакова Наталія Олександрівна, Шуть Олександр Феліксович, Блонський Степан Денисович
МПК: G05B 11/32, G05B 11/42
Мітки: часом, великим, автоматичного, запізнювання, система, комбінованого, об'єкта, регулювання
Формула / Реферат:
Система комбінованого автоматичного регулювання об'єкта з великим часом запізнювання, яка включає основний регулятор з пропорційно-інтегрально-диференційним законом регулювання, перший та другий суматори, а також вимірювальний пристрій для безперервного вимірювання величини збурюючого параметра, який з'єднано з компенсатором, що включає блок порівняння з задатчиком, блок пропорційного перетворювання, вихід якого підключено до входу блока...
Система автоматичного регулювання температури гарячого дуття
Номер патенту: 98080
Опубліковано: 10.04.2012
Автори: Сімкін Олександр Ісакович, Кобиш Олена Іванівна, Койфман Олексій Олександрович, Кравченко Віктор Петрович
МПК: G05B 15/00, C21B 9/14
Мітки: автоматичного, система, дуття, гарячого, регулювання, температури
Формула / Реферат:
Система автоматичного регулювання температури гарячого дуття, яка складається з датчика для контролю поточної температури гарячого дуття, встановленого в повітропроводі гарячого дуття, з'єднаного з колектором, який має відводи із кожного повітронагрівача групи, задавального пристрою температури гарячого дуття та автоматичного регулятора, керуючого змішувальним клапаном холодного дуття, встановленим в змішувальному повітропроводі, а також...
Спосіб автоматичного регулювання електроімпульсних установок та система для його здійснення
Номер патенту: 64066
Опубліковано: 16.02.2004
Автори: Назарова Наталя Станіславівна, Вовк Іван Трохимович
МПК: G05B 13/02
Мітки: спосіб, електроімпульсних, здійснення, автоматичного, регулювання, установок, система
Формула / Реферат:
1. Спосіб автоматичного регулювання електроімпульсних установок, який полягає в тому, що автоматичне регулювання здійснюють за принципом відхилення величини, виміряної під час розряду, який відрізняється тим, що величину відхилення визначають як частку від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму.2. Система автоматичного регулювання електроімпульсних установок, що...
Система автоматичного регулювання електроімпульсних установок
Номер патенту: 33541
Опубліковано: 15.02.2001
Автори: Назарова Наталя Станіславівна, Вовк Іван Трофимович
МПК: G05B 13/02
Мітки: автоматичного, система, електроімпульсних, регулювання, установок
Текст:
...сигналів 7. Перший вхід блоку 7 з'єднаний послідовно з амплітудним детектором 13, повторювачем 14, першим входом ключа зв'язку 15, першим входом апроксиматора 16 і виходом блоку 7. Другий вхід блоку 7 послідовно з'єднаний з другим входом апроксиматора 16 і виходом блоку 7. Третій вхід блоку 7 послідовно з'єднаний з формувачем сигналу управління 17, першою лінією затримки 18, другою лінією затримки 19 і розрядним ключем 20. До виходу першої...
Попередній патент: Штамп для рівноканального кутового пресування
Наступний патент: Спосіб отримання діелектричної плівки на основі оксиду алюмінію
Випадковий патент: Спосіб бездротового зв'язку між першою мережею та другою мережею