Система комбінованого автоматичного регулювання об’єкта з великим часом запізнювання
Номер патенту: 100798
Опубліковано: 25.01.2013
Автори: Шуть Олександр Феліксович, Блонський Степан Денисович, Мінакова Наталія Олександрівна

Формула / Реферат
Система комбінованого автоматичного регулювання об'єкта з великим часом запізнювання, яка включає основний регулятор з пропорційно-інтегрально-диференційним законом регулювання, перший та другий суматори, а також вимірювальний пристрій для безперервного вимірювання величини збурюючого параметра, який з'єднано з компенсатором, що включає блок порівняння з задатчиком, блок пропорційного перетворювання, вихід якого підключено до входу блока затримки і вихід цього блока затримки з'єднано з одним із входів другого суматора, який відрізняється тим, що компенсатор додатково містить блок диференційного перетворювання, вхід якого з'єднано з виходом блока затримки, а вихід блока диференційного перетворювання підключено до другого входу другого суматора, а вихід другого суматора є загальним виходом цієї регулюючої системи.
Текст
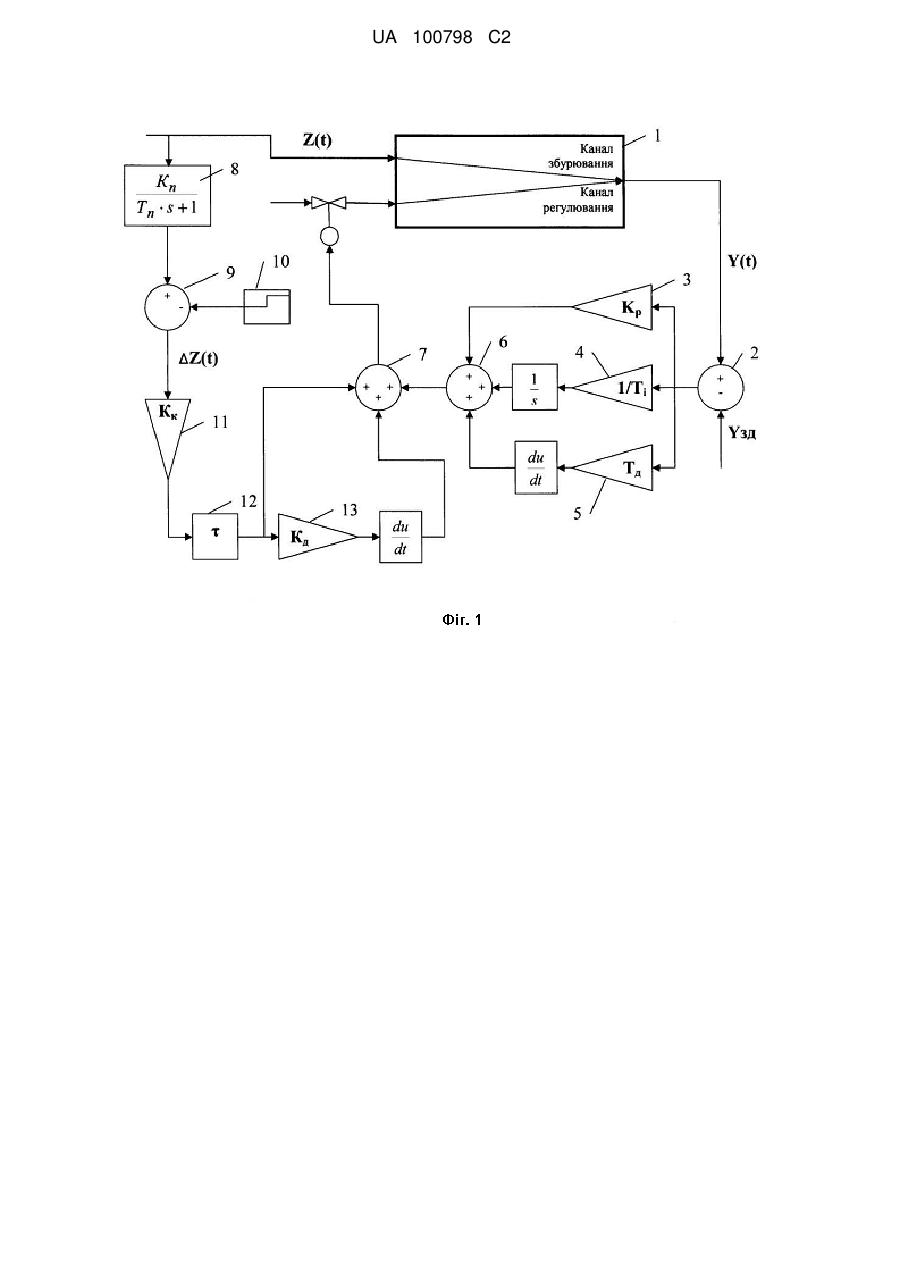
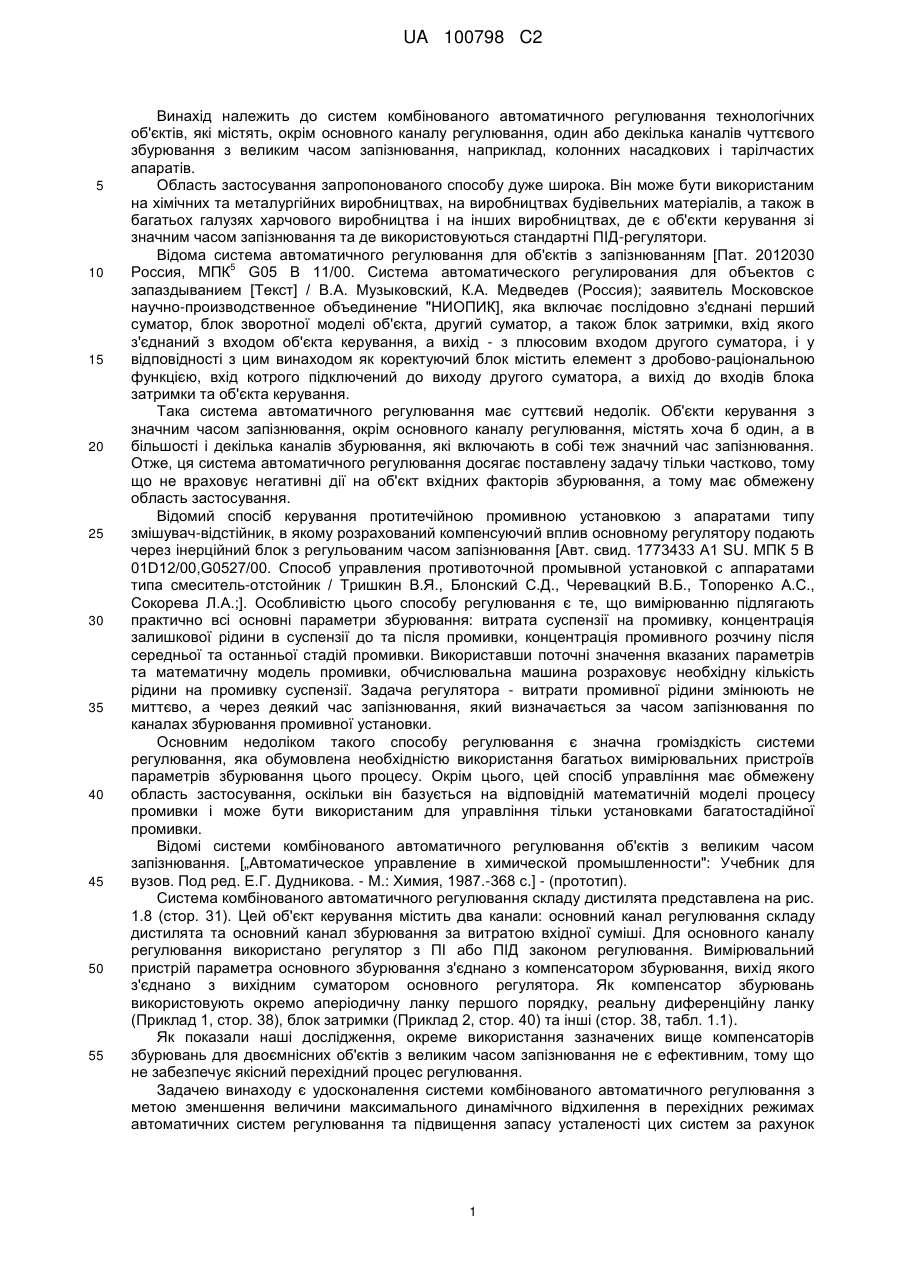
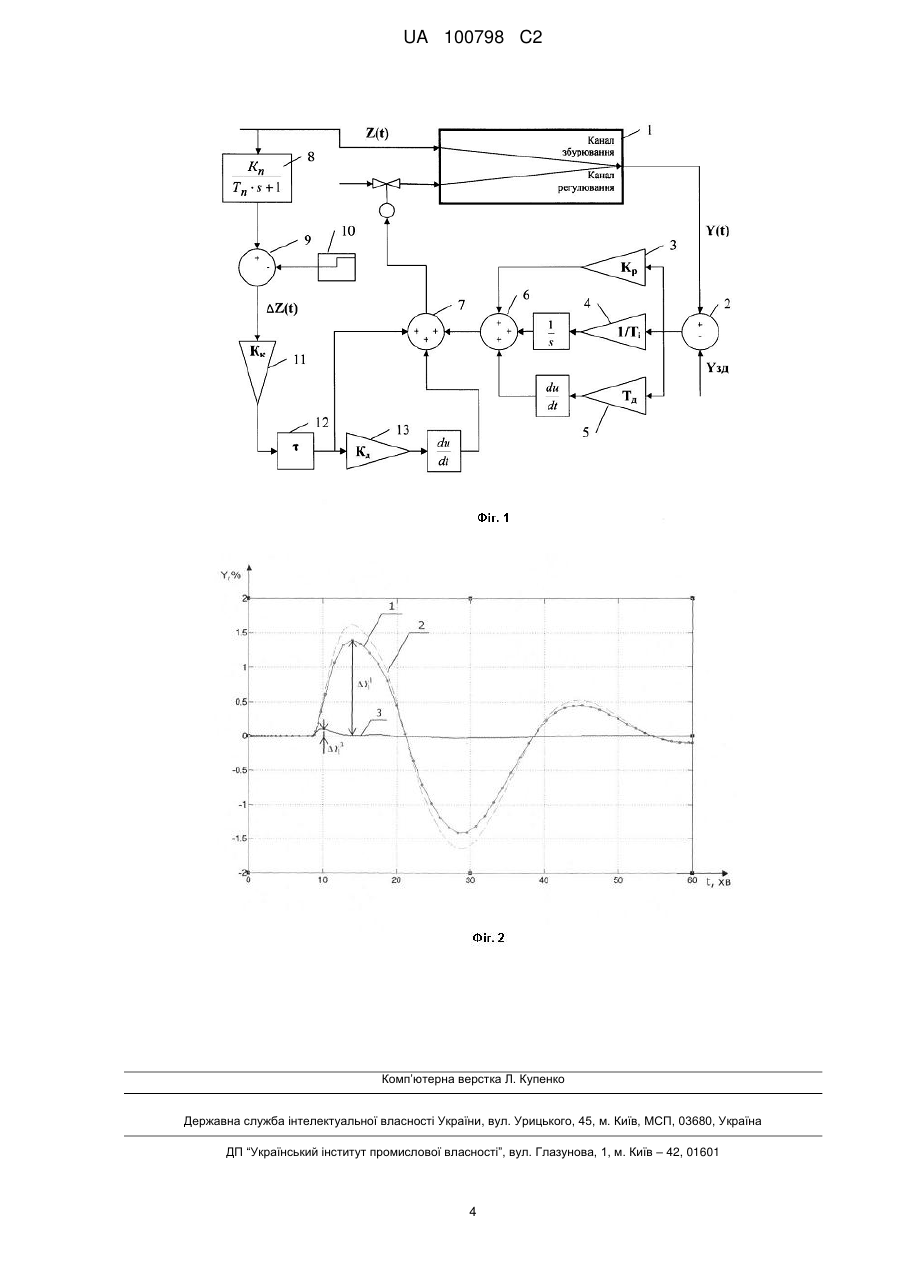
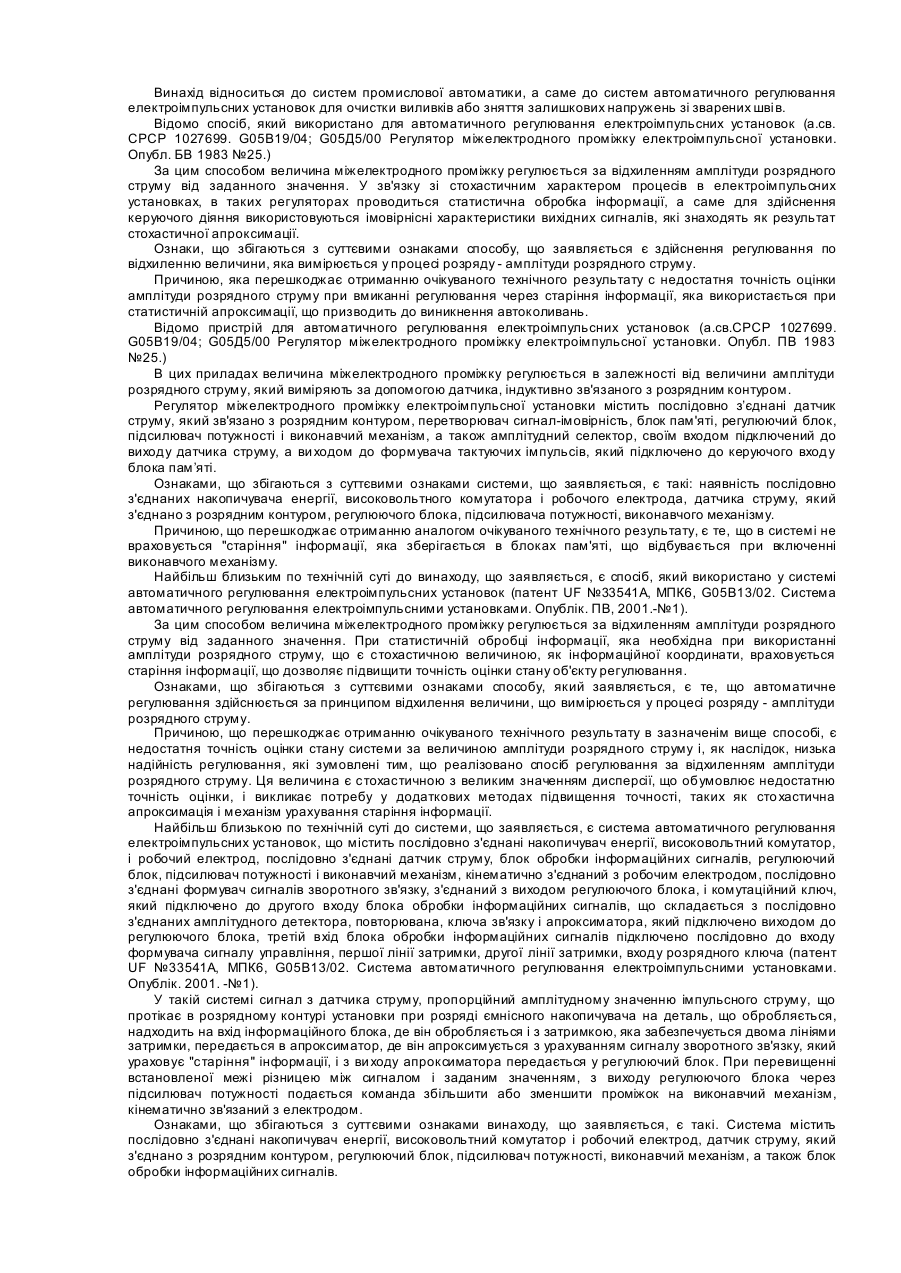
Реферат: Система комбінованого автоматичного регулювання об'єкта з великим часом запізнювання належить до систем комбінованого автоматичного регулювання технологічних об'єктів, які містять, окрім основного каналу регулювання, один або декілька каналів чуттєвого збурювання з великим часом запізнювання. Система включає основний регулятор з пропорційноінтегрально-диференційним законом регулювання, перший та другий суматори, а також вимірювальний пристрій для безперервного вимірювання величини збурюючого параметра, який з'єднано з компенсатором, що містить блок порівняння з задатчиком, блок пропорційного перетворювання, вихід якого підключено до входу блока затримки і вихід цього блока затримки, з'єднано з одним із входів другого суматора. Компенсатор цієї системи додатково містить блок диференційного перетворювання, вхід якого з'єднано з виходом блока затримки, а вихід блока диференційного перетворювання підключено до другого входу другого суматора, а вихід другого суматора є загальним виходом цієї регулюючої системи. За допомогою запропонованої системи досягається зменшення величини максимального динамічного відхилення в перехідних режимах автоматичних систем регулювання та підвищення запасу усталеності цих систем за рахунок додаткової керуючої дії компенсатора, а також зменшення часу перехідного процесу регулювання та розширення області застосування таких систем регулювання. UA 100798 C2 (12) UA 100798 C2 UA 100798 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до систем комбінованого автоматичного регулювання технологічних об'єктів, які містять, окрім основного каналу регулювання, один або декілька каналів чуттєвого збурювання з великим часом запізнювання, наприклад, колонних насадкових і тарілчастих апаратів. Область застосування запропонованого способу дуже широка. Він може бути використаним на хімічних та металургійних виробництвах, на виробництвах будівельних матеріалів, а також в багатьох галузях харчового виробництва і на інших виробництвах, де є об'єкти керування зі значним часом запізнювання та де використовуються стандартні ПІД-регулятори. Відома система автоматичного регулювання для об'єктів з запізнюванням [Пат. 2012030 5 Россия, МПК G05 В 11/00. Система автоматического регулирования для объектов с запаздыванием [Текст] / В.А. Музыковский, К.А. Медведев (Россия); заявитель Московское научно-производственное объединение "НИОПИК], яка включає послідовно з'єднані перший суматор, блок зворотної моделі об'єкта, другий суматор, а також блок затримки, вхід якого з'єднаний з входом об'єкта керування, а вихід - з плюсовим входом другого суматора, і у відповідності з цим винаходом як коректуючий блок містить елемент з дробово-раціональною функцією, вхід котрого підключений до виходу другого суматора, а вихід до входів блока затримки та об'єкта керування. Така система автоматичного регулювання має суттєвий недолік. Об'єкти керування з значним часом запізнювання, окрім основного каналу регулювання, містять хоча б один, а в більшості і декілька каналів збурювання, які включають в собі теж значний час запізнювання. Отже, ця система автоматичного регулювання досягає поставлену задачу тільки частково, тому що не враховує негативні дії на об'єкт вхідних факторів збурювання, а тому має обмежену область застосування. Відомий спосіб керування протитечійною промивною установкою з апаратами типу змішувач-відстійник, в якому розрахований компенсуючий вплив основному регулятору подають через інерційний блок з регульованим часом запізнювання [Авт. свид. 1773433 А1 SU. МПК 5 В 01D12/00,G0527/00. Способ управления противоточной промывной установкой с аппаратами типа смеситель-отстойник / Тришкин В.Я., Блонский С.Д., Черевацкий В.Б., Топоренко А.С., Сокорева Л.А.;]. Особливістю цього способу регулювання є те, що вимірюванню підлягають практично всі основні параметри збурювання: витрата суспензії на промивку, концентрація залишкової рідини в суспензії до та після промивки, концентрація промивного розчину після середньої та останньої стадій промивки. Використавши поточні значення вказаних параметрів та математичну модель промивки, обчислювальна машина розраховує необхідну кількість рідини на промивку суспензії. Задача регулятора - витрати промивної рідини змінюють не миттєво, а через деякий час запізнювання, який визначається за часом запізнювання по каналах збурювання промивної установки. Основним недоліком такого способу регулювання є значна громіздкість системи регулювання, яка обумовлена необхідністю використання багатьох вимірювальних пристроїв параметрів збурювання цього процесу. Окрім цього, цей спосіб управління має обмежену область застосування, оскільки він базується на відповідній математичній моделі процесу промивки і може бути використаним для управління тільки установками багатостадійної промивки. Відомі системи комбінованого автоматичного регулювання об'єктів з великим часом запізнювання. [„Автоматическое управление в химической промышленности": Учебник для вузов. Под ред. Е.Г. Дудникова. - М.: Химия, 1987.-368 с.] - (прототип). Система комбінованого автоматичного регулювання складу дистилята представлена на рис. 1.8 (стор. 31). Цей об'єкт керування містить два канали: основний канал регулювання складу дистилята та основний канал збурювання за витратою вхідної суміші. Для основного каналу регулювання використано регулятор з ПІ або ПІД законом регулювання. Вимірювальний пристрій параметра основного збурювання з'єднано з компенсатором збурювання, вихід якого з'єднано з вихідним суматором основного регулятора. Як компенсатор збурювань використовують окремо аперіодичну ланку першого порядку, реальну диференційну ланку (Приклад 1, стор. 38), блок затримки (Приклад 2, стор. 40) та інші (стор. 38, табл. 1.1). Як показали наші дослідження, окреме використання зазначених вище компенсаторів збурювань для двоємнісних об'єктів з великим часом запізнювання не є ефективним, тому що не забезпечує якісний перехідний процес регулювання. Задачею винаходу є удосконалення системи комбінованого автоматичного регулювання з метою зменшення величини максимального динамічного відхилення в перехідних режимах автоматичних систем регулювання та підвищення запасу усталеності цих систем за рахунок 1 UA 100798 C2 5 10 15 20 25 30 35 40 45 50 55 додаткової керуючої дії компенсатора, а також зменшення часу перехідного процесу регулювання та розширення області застосування такої системи регулювання. Поставлена задача вирішується тим, що в відомій системі комбінованого автоматичного регулювання об'єкта з великим часом запізнювання, яка містить основний регулятор з пропорційно-інтегрально-диференційним законом регулювання, перший та другий суматори, а також вимірювальний пристрій для безперервного вимірювання величини збурюючого параметра, який з'єднано з компенсатором, що включає блок порівняння з задатчиком, блок пропорційного перетворювання, вихід якого підключено до входу блока затримки і вихід цього блока затримки з'єднано з одним із входів другого суматора, і у відповідності з винаходом компенсатор цієї системи додатково містить блок диференційного перетворювання, вхід якого з'єднано з виходом блока затримки, а вихід блока диференційного перетворювання підключено до другого входу другого суматора, а вихід другого суматора є загальним виходом цієї регулюючої системи. Функціональна схема системи комбінованого автоматичного регулювання об'єкта з великим часом запізнювання представлена на фіг. 1. Система включає об'єкт регулювання 1 і основний пропорційно-інтегрально-диференційний регулятор, який містить блок порівняння 2, вихід якого з'єднано з блоком пропорційного перетворювання 3, блоком інтегрування 4 та блоком диференціювання 5, виходи яких підключені відповідно до трьох входів першого суматора 6, вихід якого підключено до одного з входів другого суматора 7, а також вимірювальний пристрій 8 для безперервного вимірювання величини збурюючого параметра, який з'єднано з компенсатором, що включає блок порівняння 9 з задатчиком 10 блока пропорційного перетворювання 11, вихід якого підключено до входу блока затримки 12 і вихід цього блока затримки з'єднано з другим входом другого суматора 7. Відповідно до винаходу компенсатор системи додатково містить блок диференційного перетворювання 13, вхід якого з'єднано з виходом блока затримки 12, а вихід блока диференціювання 13 з'єднано з одним із входів другого суматора 7 і вихід другого суматора 7 є загальним виходом цієї регулюючої системи. Запропонована система комбінованого автоматичного регулювання працює наступним чином. На вхід блока порівняння 2 подається вимірювальний сигнал регульованого параметра Y(t). До другого входу цього блока підключено сигнал від задатчика Yзд. Блок порівняння виконує операцію віднімання та обчислює сигнал розбіжності /\Y(t), який подається на входи блоків 3,4 та 5. Вихідні сигнали цих блоків підсумовуються у суматорі 6, вихід якого є сигналом керування стандартного ПІД-регулятора, який подається на один із входів другого суматора 7. Величина збурюючого параметра Z(t) вимірюється пристроєм 8 і пропорційний сигнал подається на блок порівняння 9, де обчислюється сигнал розбіжності /\Z(t), який далі подається на блок пропорційного перетворювання 11 компенсатора. Вихідний сигнал цього блока подається на вхід блока затримки 12 компенсатора, а вихідний сигнал з блока затримки одночасно направляється на вхід блока диференціювання 13 компенсатора і на один із входів другого суматора 7. Вихідний сигнал блока диференціювання 13 компенсатора подається на другий вхід цього суматора, до третього входу якого подається сигнал керування ПІД-регулятора. Отже, на другому суматорі 7 підсумовуються керуючий сигнал основного регулятора та сигнали компенсатора від блоків 12 та 13, а вихідний сигнал цього суматора є загальним керуючим сигналом U(t) цієї системи. Запропонована система комбінованого автоматичного регулювання об'єктів з великим часом запізнювання може бути реалізованим з використанням пневматичних елементів та блоків, а також представлена у вигляді програми у відповідності з алгоритмом керування, яка реалізує у мікропроцесорних контролерах закон регулювання та математичні моделі використаних блоків. Для виявлення позитивних характеристик запропонованої системи комбінованого автоматичного регулювання об'єктів з великим часом запізнювання було проведено порівняльні моделювання на ПЕОМ систем комбінованого регулювання з різними структурами компенсатора. Як об'єкт керування була взята частина колонного апарата, яка містить 10 тарілок. Особливістю такого об'єкта є те, що він має приблизно однакову інерційність по каналу регулювання та каналам збурювання. Це стосується витрати рідини, яка протікає через тарілки, а також зміни в часі концентрації цієї рідини та її температури. Для спрощення процесу моделювання була взята однакова передаточна функція по каналах регулювання та збурювання такого виду: 2 UA 100798 C2 1.0 e8.6s 2.79 s 1 4.4 s 1 (1) Отже, більш точна коміркова модель тарілчастого апарата представлена математичною моделлю двоємнісного об'єкта з запізнюванням у вигляді передаточної функції (1) і характеризується такий об'єкт загальною сталою часу Т 0=9,8 хв. та загальним часом запізнювання Т0=9,5 хв. Ці динамічні характеристики об'єкта необхідні для визначення оптимальних параметрів настройки ПІД-регулятора. На фіг. 2 представлені перехідні процеси регулювання при різних структурах компенсатора. Криву 1 перехідного процесу регулювання дає система комбінованого регулювання з компенсатором, який містить тільки пропорційний регулятор. Якщо на виході цього пропорційного регулятора підключити блок затримки, то отримаємо перехідний процес, який представлено кривою 2 (прототип). Криву 3 перехідного процесу отримаємо при використанні структури компенсатора, яка представлена на фіг. 1. Як видно з представлених перехідних 3 процесів значення максимального динамічного відхилення /\Y1 складає всього 0,1 % значення регульованого параметра, що знаходиться в межах похибки вимірювального пристрою, при цьому час регулювання складає 20 хв. Перехідні процеси регулювання, які представлені кривими 1 та 2, мають максимальне динамічне відхилення відповідно 1,4 % та 1,6 %, а час перехідного процесу регулювання складає для цього об'єкта більше 60 хв. Промислова придатність запропонованої системи комбінованого автоматичного регулювання об'єктів з великим часом запізнювання дуже широка. Він може бути використаним на хімічних та металургійних виробництвах, а також в багатьох галузях харчового виробництва і на інших виробництвах, де є об'єкти керування з великим часом запізнювання. Ws 5 10 15 20 ФОРМУЛА ВИНАХОДУ 25 30 Система комбінованого автоматичного регулювання об'єкта з великим часом запізнювання, яка включає основний регулятор з пропорційно-інтегрально-диференційним законом регулювання, перший та другий суматори, а також вимірювальний пристрій для безперервного вимірювання величини збурюючого параметра, який з'єднано з компенсатором, що включає блок порівняння з задатчиком, блок пропорційного перетворювання, вихід якого підключено до входу блока затримки, і вихід цього блока затримки з'єднано з одним із входів другого суматора, який відрізняється тим, що компенсатор додатково містить блок диференційного перетворювання, вхід якого з'єднано з виходом блока затримки, а вихід блока диференційного перетворювання підключено до другого входу другого суматора, а вихід другого суматора є загальним виходом цієї регулюючої системи. 3 UA 100798 C2 Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of complex automatic control of object with long delay time
Автори англійськоюShut’ Oleksandr Feliksovych, Blonskyi Stepan Denysovych, Minakova Natalia Oleksandrivna
Назва патенту російськоюСистема комбинированного автоматического регулирования объекта с большим временем запаздывания
Автори російськоюШуть Александр Феликсович, Блонский Степан Денисович, Минакова Наталья Александровна
МПК / Мітки
МПК: G05B 11/42, G05B 11/32
Мітки: об'єкта, великим, комбінованого, часом, система, запізнювання, автоматичного, регулювання
Код посилання
<a href="https://ua.patents.su/6-100798-sistema-kombinovanogo-avtomatichnogo-regulyuvannya-obehkta-z-velikim-chasom-zapiznyuvannya.html" target="_blank" rel="follow" title="База патентів України">Система комбінованого автоматичного регулювання об’єкта з великим часом запізнювання</a>
Спосіб автоматичного регулювання електроімпульсних установок та система для його здійснення
Номер патенту: 64066
Опубліковано: 16.02.2004
Автори: Вовк Іван Трохимович, Назарова Наталя Станіславівна
МПК: G05B 13/02
Мітки: здійснення, система, електроімпульсних, автоматичного, спосіб, установок, регулювання
Формула / Реферат:
1. Спосіб автоматичного регулювання електроімпульсних установок, який полягає в тому, що автоматичне регулювання здійснюють за принципом відхилення величини, виміряної під час розряду, який відрізняється тим, що величину відхилення визначають як частку від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму.2. Система автоматичного регулювання електроімпульсних установок, що...
Система автоматичного регулювання електроімпульсних установок
Номер патенту: 33541
Опубліковано: 15.02.2001
Автори: Вовк Іван Трофимович, Назарова Наталя Станіславівна
МПК: G05B 13/02
Мітки: регулювання, електроімпульсних, автоматичного, установок, система
Текст:
...сигналів 7. Перший вхід блоку 7 з'єднаний послідовно з амплітудним детектором 13, повторювачем 14, першим входом ключа зв'язку 15, першим входом апроксиматора 16 і виходом блоку 7. Другий вхід блоку 7 послідовно з'єднаний з другим входом апроксиматора 16 і виходом блоку 7. Третій вхід блоку 7 послідовно з'єднаний з формувачем сигналу управління 17, першою лінією затримки 18, другою лінією затримки 19 і розрядним ключем 20. До виходу першої...
Система автоматичного регулювання швидкості конвеєра
Номер патенту: 68011
Опубліковано: 12.03.2012
Автори: Піменов Геннадій Олександрович, Резніков Станіслав Юрійович, Рутберг Леонід Наумович, Дубинкин Віктор Трохимович
МПК: B65G 43/08
Мітки: регулювання, автоматичного, швидкості, система, конвеєра
Формула / Реферат:
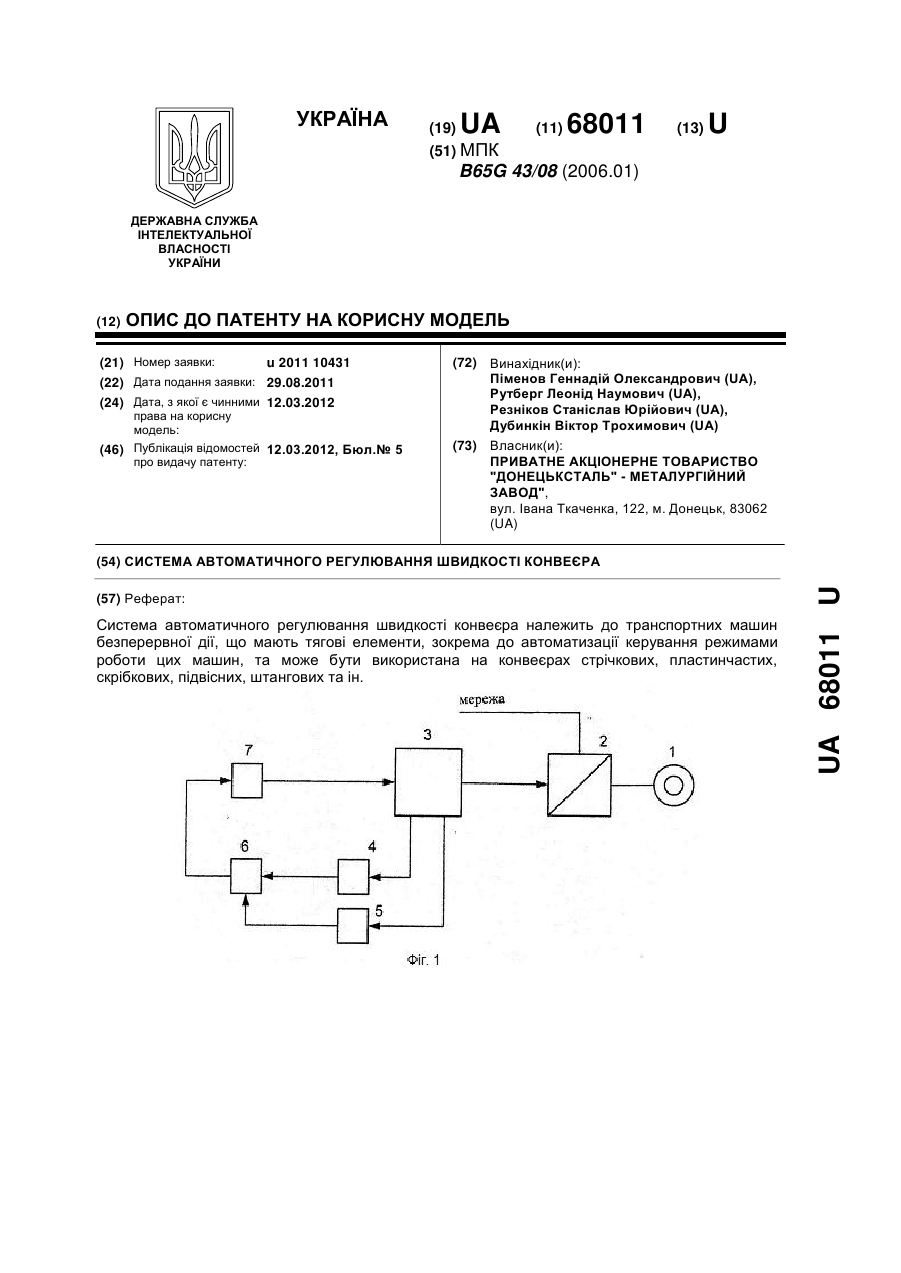
1. Система автоматичного регулювання швидкості конвеєра, що містить канал регулювання по навантаженню, який включає привід тягового елемента конвеєра, що складається з електроприводу та привідного барабана, яка відрізняється тим, що електропривід конвеєра виконаний частотно-керованим, а система автоматичного регулювання швидкості виконана замкненою, при цьому електропривід складається з перетворювача частоти та підключеного до його виходу...
Система автоматичного регулювання паливоподачі дизель-генераторної установки транспортних засобів
Номер патенту: 62057
Опубліковано: 15.12.2003
Автори: Богаєвський Олександр Борисович, Басов Олександр Віталійович, Дубровський Володимир Захарович, Синельникова Ліля Борисівна
МПК: F02D 29/06
Мітки: система, установки, паливоподачі, засобів, автоматичного, регулювання, транспортних, дизель-генераторної
Формула / Реферат:
Система автоматичного регулювання паливоподачі дизель-генераторної установки транспортних засобів, що включає до свого складу дизель, мікроконтролерний блок керування (МБК), виконавчий механізм управління положенням рейок паливних насосів з датчиком ходу рейок паливних насосів, датчик частоти обертання колінчастого вала дизеля, датчик температури дизеля, датчик тиску наддуву повітря, контролер задання частоти обертання вала дизеля, виходи...
Система автоматичного регулювання потужності багатоциліндрового дизеля
Номер патенту: 53398
Опубліковано: 15.09.2004
Автори: Філіпов Анатолій Захарович, Бешун Олексій Анатолійович, Атаманенко Микола Євгенович
МПК: F02M 63/00, F02D 17/00
Мітки: автоматичного, система, регулювання, дизеля, багатоциліндрового, потужності
Формула / Реферат:
Система автоматичного регулювання потужності багатоциліндрового дизеля, яка містить паливний насос високого тиску, механічний відцентрований регулятор з призмою коректора, форсунки закритого типу, перепускні електромагнітні клапани, встановлені на кожній секції в головці паливного насоса, датчики кутових імпульсів, положення першого циліндра, визначення циліндра, в якому відбуватиметься процес впорскування (пропуск впорскування), початку дії...
Попередній патент: Пристрій для установки рам дверей коксових печей
Наступний патент: Різноспрямований гістерезисний торсіонний демпфер (ргтд)
Випадковий патент: Пристрій для запису-відтворення на дисковий носій інформації