Спосіб орієнтації штучного супутника землі
Номер патенту: 84390
Опубліковано: 25.10.2013
Автори: Клішта Алла Валеріївна, Степанковський Юрій Володимирович

Формула / Реферат
Спосіб орієнтації штучного супутника Землі, при якому створюють керуючий момент магнітною системою шляхом взаємодії з магнітним полем Землі, який відрізняється тим, що виконують поворот супутника відносно магнітної системи за допомогою системи підвісів та електродвигунів.
Текст
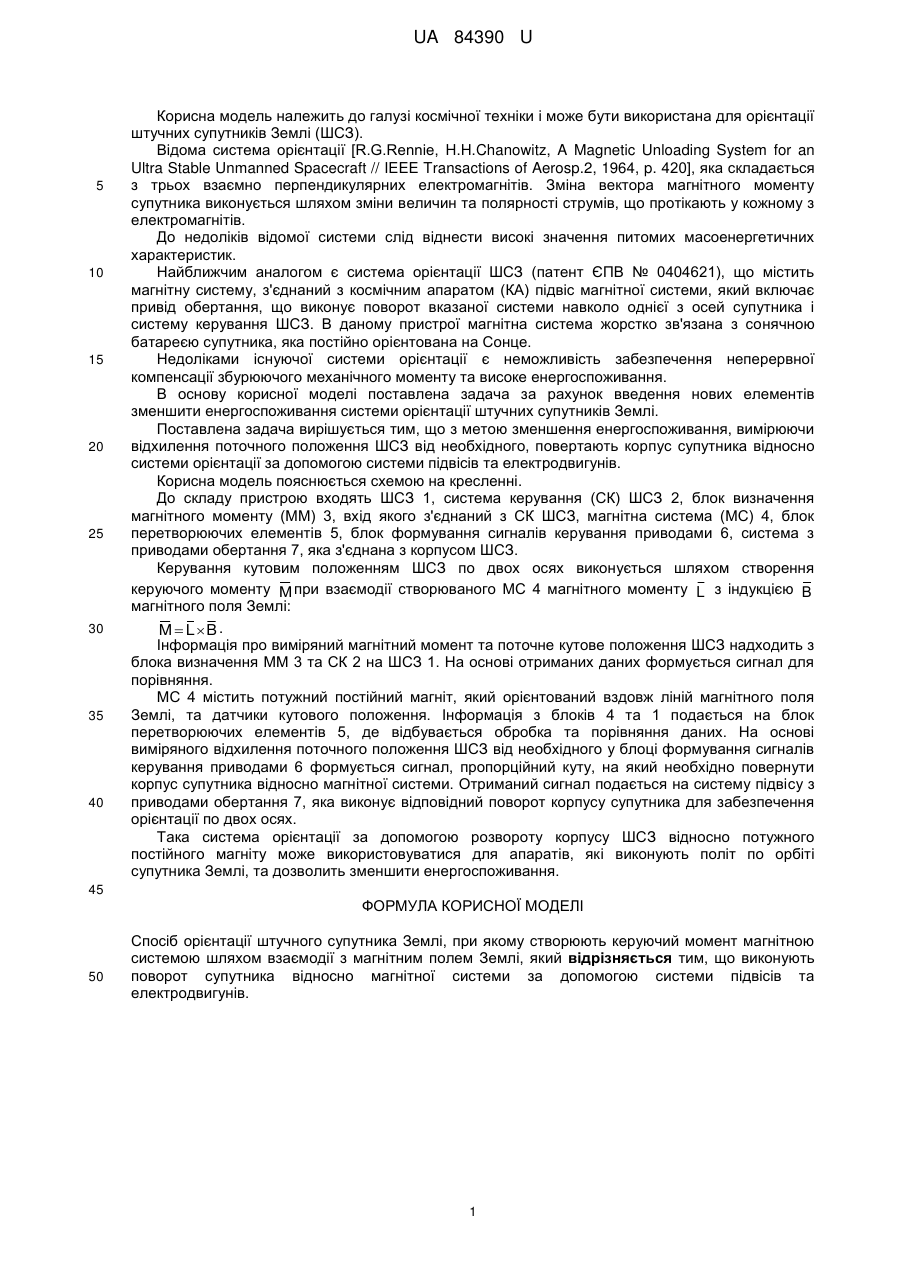
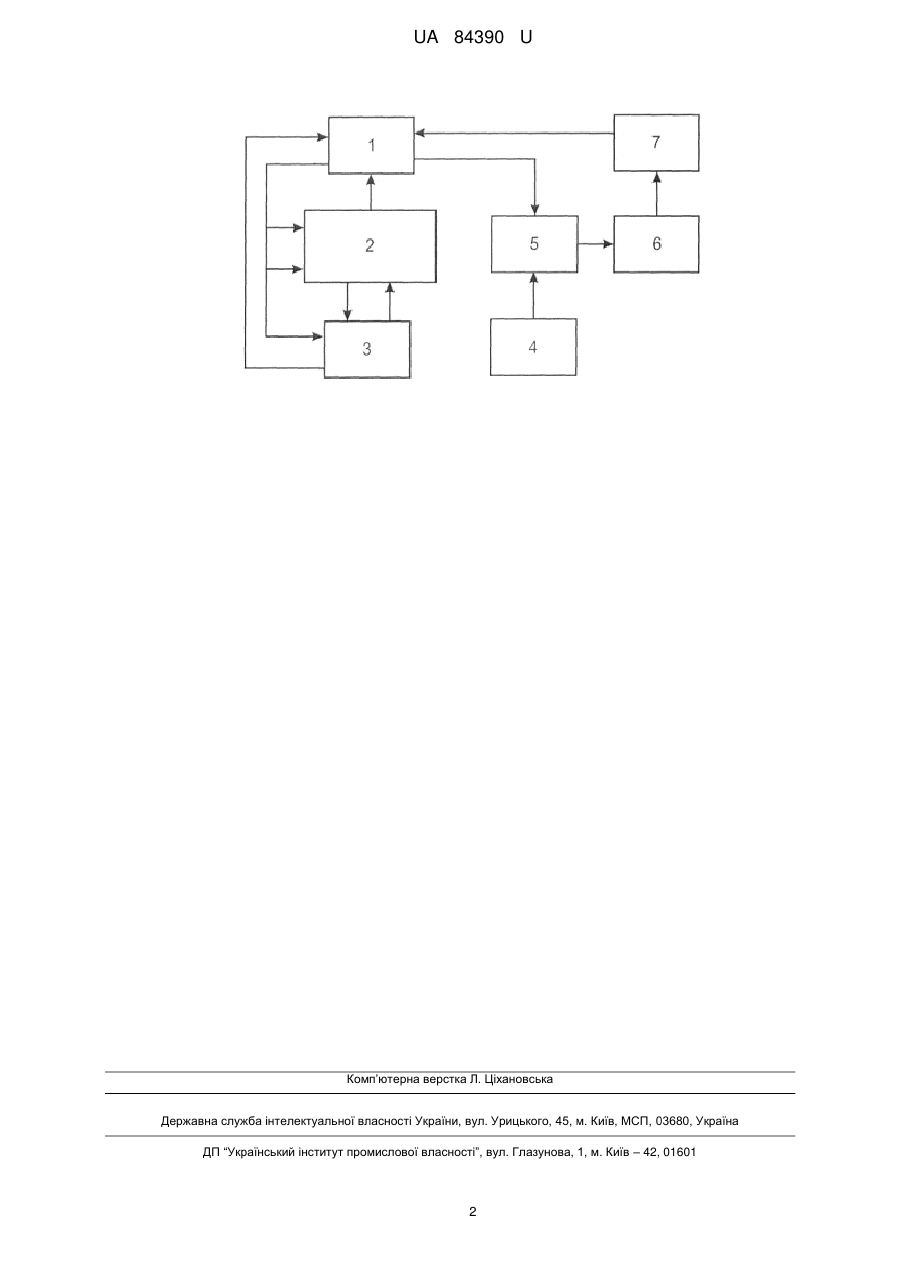
Реферат: Спосіб орієнтації штучного супутника Землі, при якому створюють керуючий момент магнітною системою шляхом взаємодії з магнітним полем Землі. Виконують поворот супутника відносно магнітної системи за допомогою системи підвісів та електродвигунів. UA 84390 U (54) СПОСІБ ОРІЄНТАЦІЇ ШТУЧНОГО СУПУТНИКА ЗЕМЛІ UA 84390 U UA 84390 U 5 10 15 20 25 30 35 40 Корисна модель належить до галузі космічної техніки і може бути використана для орієнтації штучних супутників Землі (ШСЗ). Відома система орієнтації [R.G.Rennie, H.H.Chanowitz, A Magnetic Unloading System for an Ultra Stable Unmanned Spacecraft // IEEE Transactions of Aerosp.2, 1964, p. 420], яка складається з трьох взаємно перпендикулярних електромагнітів. Зміна вектора магнітного моменту супутника виконується шляхом зміни величин та полярності струмів, що протікають у кожному з електромагнітів. До недоліків відомої системи слід віднести високі значення питомих масоенергетичних характеристик. Найближчим аналогом є система орієнтації ШСЗ (патент ЄПВ № 0404621), що містить магнітну систему, з'єднаний з космічним апаратом (КА) підвіс магнітної системи, який включає привід обертання, що виконує поворот вказаної системи навколо однієї з осей супутника і систему керування ШСЗ. В даному пристрої магнітна система жорстко зв'язана з сонячною батареєю супутника, яка постійно орієнтована на Сонце. Недоліками існуючої системи орієнтації є неможливість забезпечення неперервної компенсації збурюючого механічного моменту та високе енергоспоживання. В основу корисної моделі поставлена задача за рахунок введення нових елементів зменшити енергоспоживання системи орієнтації штучних супутників Землі. Поставлена задача вирішується тим, що з метою зменшення енергоспоживання, вимірюючи відхилення поточного положення ШСЗ від необхідного, повертають корпус супутника відносно системи орієнтації за допомогою системи підвісів та електродвигунів. Корисна модель пояснюється схемою на кресленні. До складу пристрою входять ШСЗ 1, система керування (СК) ШСЗ 2, блок визначення магнітного моменту (ММ) 3, вхід якого з'єднаний з СК ШСЗ, магнітна система (МС) 4, блок перетворюючих елементів 5, блок формування сигналів керування приводами 6, система з приводами обертання 7, яка з'єднана з корпусом ШСЗ. Керування кутовим положенням ШСЗ по двох осях виконується шляхом створення керуючого моменту М при взаємодії створюваного МС 4 магнітного моменту L з індукцією В магнітного поля Землі: M L B . Інформація про виміряний магнітний момент та поточне кутове положення ШСЗ надходить з блока визначення MM 3 та СК 2 на ШСЗ 1. На основі отриманих даних формується сигнал для порівняння. МС 4 містить потужний постійний магніт, який орієнтований вздовж ліній магнітного поля Землі, та датчики кутового положення. Інформація з блоків 4 та 1 подається на блок перетворюючих елементів 5, де відбувається обробка та порівняння даних. На основі виміряного відхилення поточного положення ШСЗ від необхідного у блоці формування сигналів керування приводами 6 формується сигнал, пропорційний куту, на який необхідно повернути корпус супутника відносно магнітної системи. Отриманий сигнал подається на систему підвісу з приводами обертання 7, яка виконує відповідний поворот корпусу супутника для забезпечення орієнтації по двох осях. Така система орієнтації за допомогою розвороту корпусу ШСЗ відносно потужного постійного магніту може використовуватися для апаратів, які виконують політ по орбіті супутника Землі, та дозволить зменшити енергоспоживання. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Спосіб орієнтації штучного супутника Землі, при якому створюють керуючий момент магнітною системою шляхом взаємодії з магнітним полем Землі, який відрізняється тим, що виконують поворот супутника відносно магнітної системи за допомогою системи підвісів та електродвигунів. 1 UA 84390 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюStepankovskyi Yurii Volodymyrovych
Автори російськоюСтепанковский Юрий Владимирович
МПК / Мітки
МПК: B64G 1/24
Мітки: штучного, орієнтації, спосіб, супутника, землі
Код посилання
<a href="https://ua.patents.su/4-84390-sposib-oriehntaci-shtuchnogo-suputnika-zemli.html" target="_blank" rel="follow" title="База патентів України">Спосіб орієнтації штучного супутника землі</a>
Спосіб орієнтації штучного супутника землі
Номер патенту: 93340
Опубліковано: 25.01.2011
Автори: Степанковський Юрій Володимирович, Голуб Максим Віталійович
МПК: B64G 1/24
Мітки: спосіб, штучного, орієнтації, супутника, землі
Формула / Реферат:
Спосіб орієнтації штучного супутника Землі, що включає створення керуючого моменту за допомогою силових гіростабілізаторів (СГС) і моментних магнітоприводів (MM), який відрізняється тим, що визначають швидкість зміни кінетичних моментів СГС по осях супутника при вимкнених MM, визначають швидкість зміни кінетичних моментів СГС по осях супутника при ввімкнених ММ в будь-яких точках орбіти, на основі проведених вимірювань вираховують...
Спосіб сироти запуску повільного штучного супутника землі
Номер патенту: 39911
Опубліковано: 10.03.2009
Автор: Сирота Анатолій Васильович
МПК: B64G 1/00
Мітки: спосіб, сироти, супутника, повільного, землі, запуску, штучного
Формула / Реферат:
Спосіб запуску повільного штучного супутника Землі, що включає вивід штучного супутника на орбіту обертання навколо Землі, який відрізняється тим, що штучний супутник виводять на кругову екваторіальну орбіту, яка має з геостаціонарною орбітою зазор, величина якого визначає напрямок руху та потрібну швидкість його переміщення відносно геостаціонарної орбіти.
Система визначення орієнтації штучного супутника землі
Номер патенту: 21768
Опубліковано: 30.04.1998
Автори: Салтиков Юрій Дмитрович, П'ятак Ігор Авдійович
МПК: G01S 5/02, G01C 21/24
Мітки: орієнтації, штучного, система, визначення, землі, супутника
Формула / Реферат:
1. Система определения ориентации искусственного спутника Земли, состоящая из гироскопического блока измерителя угловой скорости спутника, вычислительного устройства и радиопеленгатора, включающего радиопеленгационный блок с антенной системой, отличающаяся тем, что в состав радиопеленгатора входят обзорное радиоприемное устройство и блок фиксации частоты принимаемого сигнала.2. Система определения ориентации, выполненная в...
Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника землі
Номер патенту: 56084
Опубліковано: 15.04.2003
Автор: Богом'я Володимир Іванович
МПК: B64G 3/00
Мітки: штучного, роботи, комплексу, точності, підвищення, спеціального, супутника, землі, планування, бортового, спосіб
Формула / Реферат:
Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника Землі, який полягає в тому, що через технічні засоби прийому до формувача наукової заявки надходять метеодані, які перетворюють з аналогової в цифрову форму з наступним записом на магнітні носії ПЕОМ, отримані значення полів баричної інформації накладають на географічні координати заданих районів зйомки і розраховують можливість зйомки бортовим...
Спосіб орієнтації штучних супутників землі
Номер патенту: 73372
Опубліковано: 25.09.2012
Автори: Степанковський Юрій Володимирович, Клішта Алла Валеріївна
МПК: B64G 1/24
Мітки: спосіб, штучних, землі, супутників, орієнтації
Формула / Реферат:
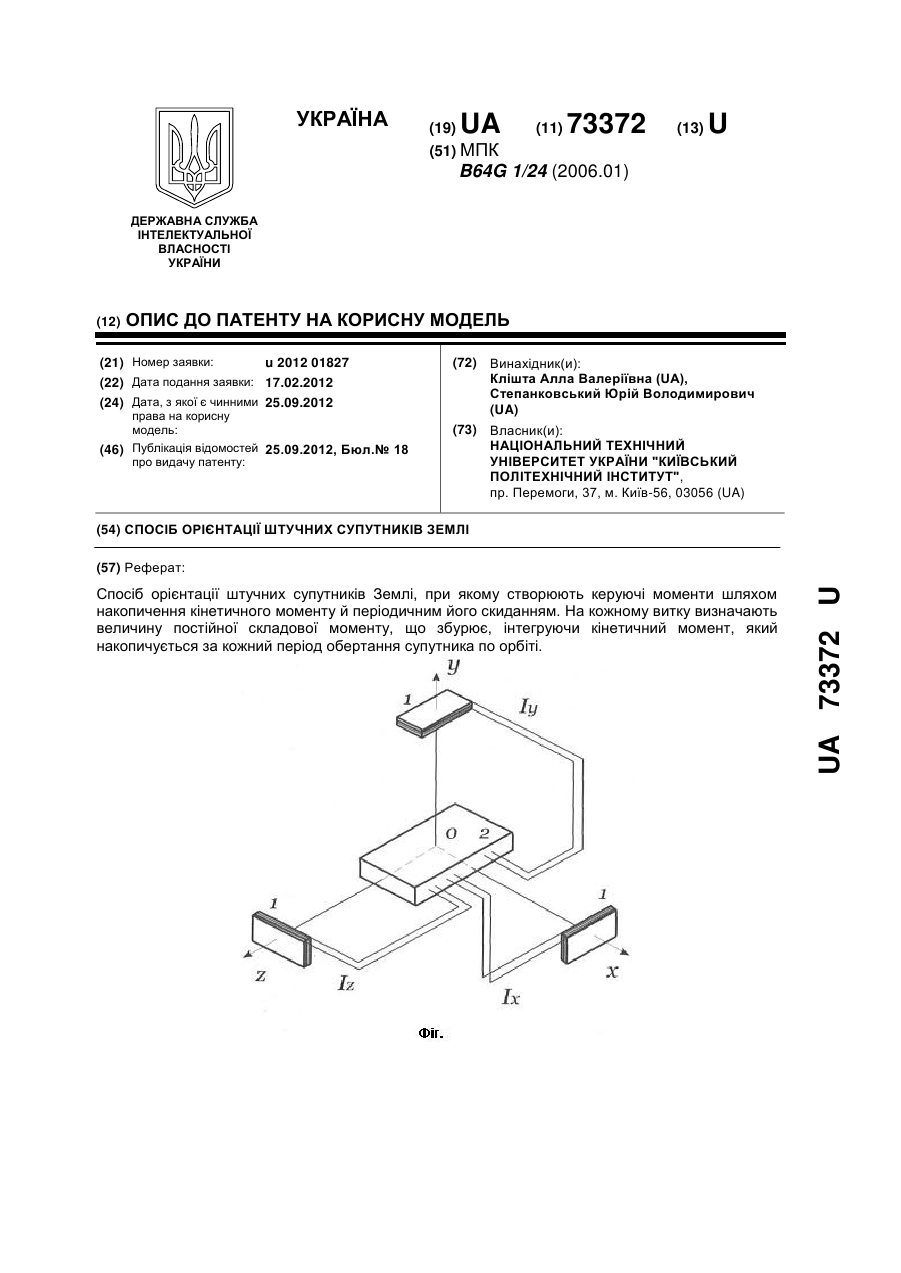
Спосіб орієнтації штучних супутників Землі, при якому створюють керуючі моменти шляхом накопичення кінетичного моменту й періодичним його скиданням, який відрізняється тим, що на кожному витку визначають величину постійної складової моменту, що збурює, інтегруючи кінетичний момент, який накопичується за кожний період обертання супутника по орбіті.
Попередній патент: Пристрій виміру витрати твердого палива теплових електростанцій
Наступний патент: Спосіб прогнозування виникнення дифузного нетоксичного зоба у хлопчиків
Випадковий патент: Спосіб запобігання утворенню накипу та корозії в водоциркуляційних системах охолодження