Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника землі

Формула / Реферат
Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника Землі, який полягає в тому, що через технічні засоби прийому до формувача наукової заявки надходять метеодані, які перетворюють з аналогової в цифрову форму з наступним записом на магнітні носії ПЕОМ, отримані значення полів баричної інформації накладають на географічні координати заданих районів зйомки і розраховують можливість зйомки бортовим спеціальним комплексом штучного супутника Землі в заданих районах за критерієм хмарності, який відрізняється тим, що отримані дані порівнюють з даними про можливість зйомки за критерієм стану бортової апаратури, технологічними даними і балістичними даними, задані райони зйомки, що не задовольняють хоча б по одному критерію, відбраковують, а райони зйомки які залишилися складають заявку-програму робіт бортового спеціального комплексу на найближчий технологічний цикл.
Текст
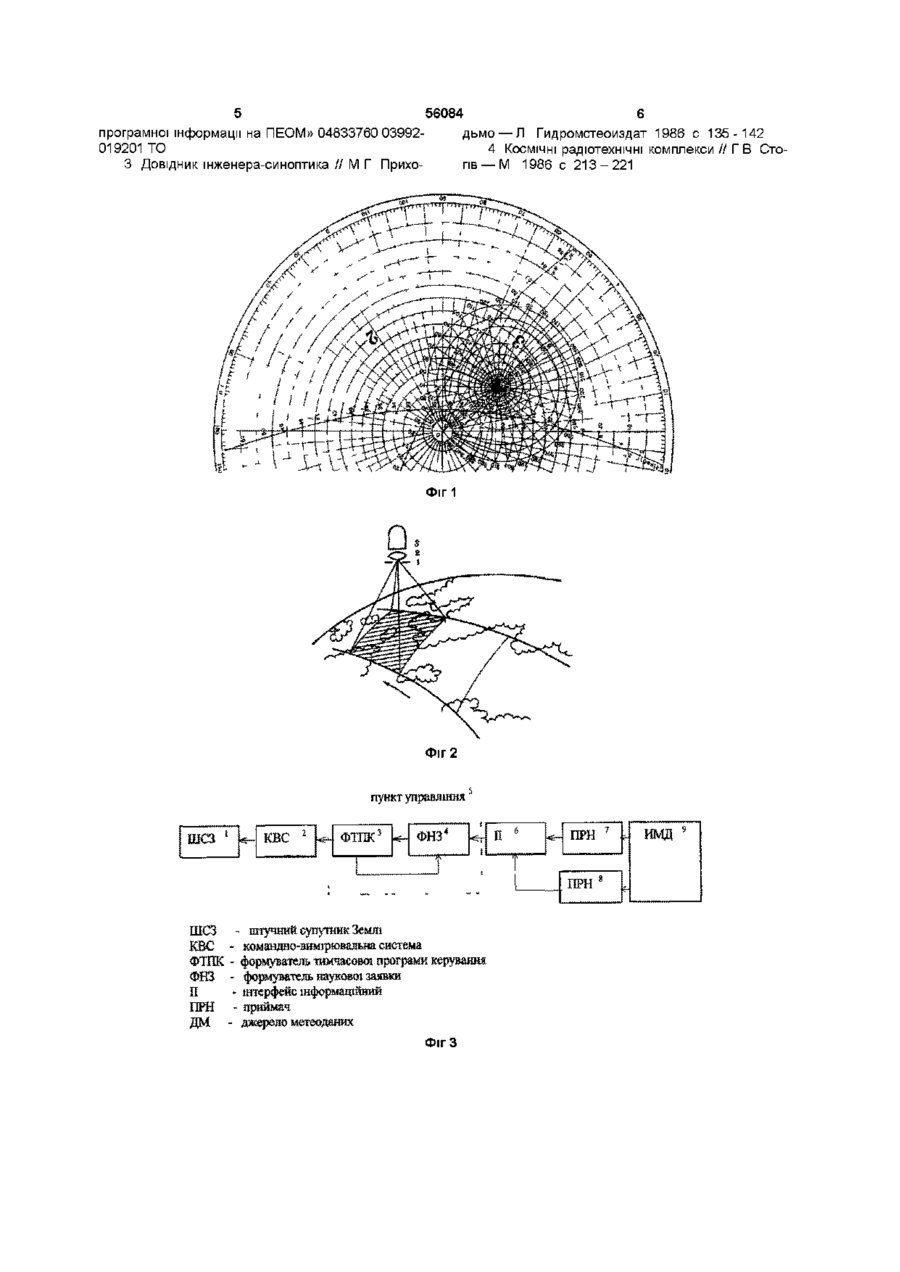
Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника Землі, який полягає в тому, що через технічні засоби прийому до формувача наукової заявки надходять метеодані, які перетворюють з аналогової в цифрову форму з наступним записом на магнітні носи ПЕОМ, отримані значення полів баричної інформації накладають на географічні Пропонований винахід відноситься до області радіотехніки й зв'язку, зокрема, до планування роботи бортового спеціального комплексу (штучного супутника Землі) (ШСЗ) для оптичних пристроїв і може бути використаний у вітчизняних космічних системах дистанційного зондування Землі Відомий спосіб планування бортового спеціального комплексу полягає у використанні спеціального планшета з проекціями орбіт ШСЗ (фиг 1) і діаграмою спостереження наукового пункту Нанесена на планшет траса польоту ШСЗ сполучається з діаграмою спостереження наукового вимірювального пункту і вручну розраховуються моменти включення й вимикання наукової апаратури [1] Недоліком такого способу є низька точність географічної прив'язки супутникового зображення, низька оперативність керування й планування роботи ШСЗ, висока вимогливість до кваліфікації операторів при ручних розрахунках на тривалий інтервал планування Найбільш близьким до пропонованого технічного рішення, обраним як прототип є спосіб автоматизованого планування роботи бортового спеціального комплексу (БСК) ШСЗ "Сич-1", який полягає в тому, що на підставі прогнозу руху ШСЗ, прогнозу зон видимості наукових і службових пунктів, прогнозу освітленості підсупутникової траси польоту ШСЗ розраховувалися моменти включен координати заданих районів зйомки і розраховують можливість зйомки бортовим спеціальним комплексом штучного супутника Землі в заданих районах за критерієм хмарності, який відрізняється тим, що отримані дані порівнюють з даними про можливість зйомки за критерієм стану бортової апаратури, технологічними даними і балістичними даними, задані райони зйомки, що не задовольняють хоча б по одному критерію, відбраковують, а райони зйомки які залишилися складають заявку-програму робіт бортового спеціального комплексу на найближчий технологічний цикл ня й вимикання наукової апаратури [2] Супутникова інформація, що утратила свою якість під впливом хмарності (фіг 2) і не придатна до подальшої обробки вважалася некондиційною До недоліків цього способу відноситься низька КІЛЬКІСТЬ одержуваної кондиційної супутникової інформації і нераціональне використання ресурсу бортового спеціального комплексу В основу винаходу поставлена задача створити спосіб підвищення точності планування бортового спеціального комплексу ШСЗ, що дозволив би забезпечити підвищення КІЛЬКОСТІ КОНДИЦІЙНОЇ супутникової інформації на заданий інтервал планування, при цьому заощадити ресурс роботи бортової апаратури Для рішення поставленої задачі в способі підвищення точності планування роботи бортового спеціального комплексу ШСЗ використовується автоматизований розрахунок прогнозу хмарних утворень, що проводиться для районів зйомки, замовлених споживачами космічної інформації На фіг 3 приведена структурна схема пристрою, що реалізує заявлений спосіб, а на фіг 4 і фіг 5 структурна схема елементів пристрою Сутність запропонованого способу полягає в наступному Допустимо, що для будь-якого хмарного утворення можна виділити один характерний елемент (хмарну частку), що може бути знайдений 00 о (О ю 56084 на двох послідовних супутникових знімках, отриманих у моменти часу t1 і t2 При цьому передбачається, що переміщення хмарної частки від моменту виконання першої зйомки до моменту часу tp на який виконується прогноз, відбувається рівномірно, по найкоротшій відстані уздовж поверхні Землі (тобто по дузі великого кола, що проходить через два послідовних положення однієї і тієї ж хмарної частки на прийнятих знімках поверхні, що підстилає, і центр Землі) Виходячи зі зроблених припущень, визначивши широту - f1 і довготу - 11 хмарної частки на першому знімку (отриманому в момент t1) і ВІДПОВІДНІ їй координати f2 і 12 на другому знімку (отриманому в момент t2) можна визначити переміщення хмарної частки - ДХ, азимут переміщення - А і швидкість - V переміщення хмарної частки ДХ = arccos[cos(f2 - f1) • COS((I2 - И) • cos(f2))], (1) А = arccos[tg(f2 - f1) / tg(AX)], (2) A = 2p-А, якщо І2< 11, V = Rz • ДХ/At, (3) де At = t2 -11 - часовий інтервал між знімками (годин), Rz = 6370км - радіус Землі Прогноз переміщення хмарної частки здійснюється ВІДПОВІДНО до формул ДХр = V • Atp/Rz, (4) fp = f2 + arctg[cos(a) • tg(AXp)], (5) Ip = 12 + arcsm[sm(a) • sin (ДХр)] / cos(f2), (6) де індекс "р" у ВІДПОВІДНИХ величин указує на те, що вони обчислені на момент прогнозу - tp, Atp = tp -t2 Розглянутий спосіб, заснований на використанні прогностичних факсимільних карт полів баричної топографії для прогнозу переміщень хмарних часток, ідентифікація яких здійснюється по супутникових знімках, отриманим до моменту початку прогнозу У випадку, якщо за прогнозом передбачуваний район на 50% і більш закритий хмарами, він не планується до зйомки Розрахунок прогнозу здійснюється безупинно, уточнюється через кожні 2 години Заявлений спосіб може бути реалізований, наприклад, за допомогою пристрою, структурна схема якого і його складових частин приведена на фіг 3, фіг 4, фіг 5 Пристрій містить (фігЗ) два приймачі метеоданих 7, 8, інтерфейс інформаційний (II) 6, командно-вимірювальну систему (КВСНУВ) 2, пункт керування 5, що складає з формувача тимчасової програми керування (ФТПК) 3 і формувача наукової заявки (ФНЗ) 4, джерела метеоданих 9 Формувач наукової заявки (фіг 4) має у своєму складі формувач прогнозу руху ШСЗ 1, формувач обмежень у ВІДПОВІДНОСТІ з станом бортової апаратури 2, формувач обмежень по технологічним даним 3, формувач прогнозу хмарних утворень 4, формувач заявки-програми робіт БСК 5 Вхід 1 з'єднаний з виходом ФТПК (фіг 3) Вхід 2 з'єднаний з виходом II (фіг 5) Вихід ФНЗ є входом ФТПК пункту керування (фіг 3) Інтерфейс інформаційний (фіг 5) містить формувач синхронізації 1, формувач бінаризації 2, формувач географічної прив'язки 3, формувач картографічної проекції 4, перетворювач вхідних метеоданих 5 у цифрову форму Робота пристрою полягає в наступному Сигнали з джерела метеоданих приймають двома приймачами (фіг 2) Приймач 7 приймає дані про поля баричної інформації у діапазоні 13 8кгц, приймач 8 приймає інформацію метеорологічних супутників у діапазоні 1 7Ггц Отримані сигнали надходять на вхід 1 і 2 інтерфейсу інформаційного (фіг 4) В інтерфейсі інформаційному відбувається синхронізація, бінаризація, географічна прив'язка, формування картографічної проекції й перетворення вхідних метеоданих у цифрову форму Результати обробки вхідних метеоданих подають на формувач наукової заявки Формувач наукової заявки (фіг 4) формує вибірку районів, необхідних для зйомки На вхід 1 формувача наукової заявки надходять дані з виходу формувача тимчасової програми керування, у виді початкових умов руху ШСЗ, даних про стан бортової апаратури, даних за технологією керування Формувач прогнозу руху ШСЗ 1 проводить розрахунок усіх можливих районів зйомки на заданий інтервал Формувач обмежень за станом бортової апаратури 2 проводить розрахунок районів, зйомка яких неможлива через відмову бортової апаратури Формувач обмежень по технологічним данім 3 проводить розрахунок районів, зйомка яких неможлива через виконання спеціальних робіт із бортовим забезпечуючим комплексом На вхід 2 надходять дані з виходу інтерфейсу інформаційного Формувач прогнозу хмарних утворень 4 проводить розрахунок можливих районів за критерієм хмарності Отримані дані надходять на вхід формувача заявки-програми 5 Формувач заявки-програми робіт БСК 5 проводить добір районів зйомки за критеріями прогнозу руху, стану бортової апаратури, технологічним даним керування прогнозу хмарності Райони, що не задовольняють хоча б одному з критеріїв відбраковуються, що залишилися складають заявкупрограмму роботи БСК, що вводиться в базу даних реалізованих заявок і направляється у формувач тимчасової програми керування Пристрій має ВІДОМІ, випробувані на практиці елементи, випуск яких освоєний підприємствами промисловості і наукових установ України Зокрема, виробництво ШСЗ освоєно підприємством "Південне", КВС і ПУ є штатними елементами апаратури Національного Центра Управління та Випробування Космічних Засобів (м Євпаторія) Інтерфейс інформаційний може бути виготовлений практично на будь-якому підприємстві електронного профілю Заявлений спосіб у порівнянні з прототипом має наступні технічні переваги - підвищується КІЛЬКІСТЬ одержуваної кондиційної супутникової інформації, - заощаджується ресурс БСК ШСЗ, - підвищується ефективність використання ШСЗ за цільовим призначенням Список літератури 1 «Супутникова метеорологія» // М А Герман — Л Гидромстсоиздат , 1975,—с 152-167 2 «Спеціальне програмне забезпечення автоматизації розрахунку і формування командно 5 56084 6 програмної інформації на ПЕОМ» 04833760 03992дьмо — Л Гидромстеоиздат 1986 с 135-142 019201 ТО 4 КОСМІЧНІ радіотехнічні комплекси//Г В Сто3 Довідник інженера-синоптика//М Г Прихопв — М 1986 с 213-221 Фіг 1 Фіг 2 пункт управління ШСЗ ' ШСЗ КВС ФІШ ФНЗ П ПРН ДМ КВС - штучний супутник Землі - командно-вимірювальна система - формуватель тимчасової програми керування - формуватеяь наукової заявки - інтерфейс інформаційний - приймач - джерело метеоданих Фіг З 56084 ФО|)муватель 2 обмежень за станом І Формувати ь 5 заявкв-програда робггБСК Формуватель прогнозу хмарних утворень ФІГ.4 Вхід 1 формуваталь синхрояі заш ВИХІД Вхщ2' Фіг.5 Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for improvement precision of work planning of special board complex of artificial earth satellite
Автори англійськоюBohomia Volodymyr Ivanovych
Назва патенту російськоюСпособ повышения точности планирования работы бортового специального комплекса искусственного спутника земли
Автори російськоюБогомья Владимир Иванович
МПК / Мітки
МПК: B64G 3/00
Мітки: планування, землі, спосіб, точності, роботи, супутника, комплексу, бортового, спеціального, штучного, підвищення
Код посилання
<a href="https://ua.patents.su/4-56084-sposib-pidvishhennya-tochnosti-planuvannya-roboti-bortovogo-specialnogo-kompleksu-shtuchnogo-suputnika-zemli.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення точності планування роботи бортового спеціального комплексу штучного супутника землі</a>
Система визначення орієнтації штучного супутника землі
Номер патенту: 21768
Опубліковано: 30.04.1998
Автори: Салтиков Юрій Дмитрович, П'ятак Ігор Авдійович
МПК: G01S 5/02, G01C 21/24
Мітки: штучного, землі, визначення, супутника, орієнтації, система
Формула / Реферат:
1. Система определения ориентации искусственного спутника Земли, состоящая из гироскопического блока измерителя угловой скорости спутника, вычислительного устройства и радиопеленгатора, включающего радиопеленгационный блок с антенной системой, отличающаяся тем, что в состав радиопеленгатора входят обзорное радиоприемное устройство и блок фиксации частоты принимаемого сигнала.2. Система определения ориентации, выполненная в...
Спосіб підвищення точності роботи направляючих і пристрій для його здійснення
Номер патенту: 40072
Опубліковано: 16.07.2001
Автори: Бабін Олег Фавієвич, Ковальов Віктор Дмитрович, Мельник Максим Сергійович
МПК: G05D 3/12
Мітки: направляючих, точності, роботи, здійснення, підвищення, пристрій, спосіб
Формула / Реферат:
1.Спосіб підвищення точності роботи направляючих, при якому здійснюється корекція положення рухомого вузла за допомогою приводів малих переміщень, відрізняється тим, що у якості вимірюваальної бази використовують еталонну поверхню, яка має форму траєкторії руху рухомого вузла, контролюють положення рухомого вузла за допомогою взаємодії датчиків з еталонною поверхнею, які вимірюють величину відхилення положення рухомого вузла відносно...
Спосіб виведення штучного супутника на геостаціонарну орбіту
Номер патенту: 46135
Опубліковано: 15.05.2002
Автор: Вагнер Алан
Мітки: супутника, спосіб, орбіту, штучного, геостаціонарну, виведення
Формула / Реферат:
1. Спосіб виведення на геостаціонарну орбіту штучного супутника, що запускається на згадану орбіту за допомогою космічного транспортного засобу, який відрізняється тим, щоа) конструктивний вузол, що складається з останнього ступеня зазначеного космічного транспортного засобу і супутника, виведеного на геостаціонарну орбіту, запускають на “орбіту-могильник",б) супутник відокремлюють від зазначеного останнього ступеня, який...
Спосіб підвищення точності прицілювання стрілецької зброї
Номер патенту: 37105
Опубліковано: 16.04.2001
Автори: Сенаторов Володимир Миколайович, Сенаторов Микола Володимирович
МПК: F41G 5/00
Мітки: зброї, точності, стрілецької, підвищення, прицілювання, спосіб
Текст:
...сформованої фігури 3. А при виході ока за межі зони Æ2m д має місце чітке бачення частини зображення контуру фігури 3; зокрема, при віддаленні ока від оптичної осі на відстань m (край вихідної зіниці) стрілець бачить близько її чверті. Пучки променів, які відповідають межі поля зору стрільця крізь вихідну зіницю, показані пунктиром з двома стрілками. Тобто, знаходячись в межах зони Æ2m д, око стрільця бачить тільки прицільну сітку 1 (фіг....
Спосіб формування навколо землі компланарної групи штучних супутників землі
Номер патенту: 26787
Опубліковано: 12.11.1999
Автори: Конишева Галина Миколаївна, Абросімов Микола Миколайович, Малков Андрій Борисович
МПК: B64G 9/00
Мітки: супутників, землі, групи, компланарної, формування, штучних, спосіб
Формула / Реферат:
1. Спосіб формування навколо Землі компланарної групи штучних супутників Землі, у відповідності з яким визначають параметри орбіт, порядок та засоби виведення на них заданого числа H штучних супутників Землі, виводять їх на розрахункові орбіти, під час виведення цим штучним супутникам Землі задають параметри виведення, які забезпечують компланарне розміщення центрів мас усіх H штучних супутників Землі навколо Землі у межах спільної площини,...
Попередній патент: Хвилевідна щілинна антена
Наступний патент: Імітатор динаміки кабіни тренажера для навчання водінню транспортних засобів
Випадковий патент: Спосіб нагрівання хвостового газу у виробництві азотної кислоти