Кореляційна система з диференціальним зв’язком вирівнювання часових запізнювань сигналів
Номер патенту: 87248
Опубліковано: 25.06.2009
Автори: Булгач Віктор Леонардович, Зайцев Григорій Фролович, Доля Олег Миколайович, Градобоєва Неля Вікторівна
Формула / Реферат
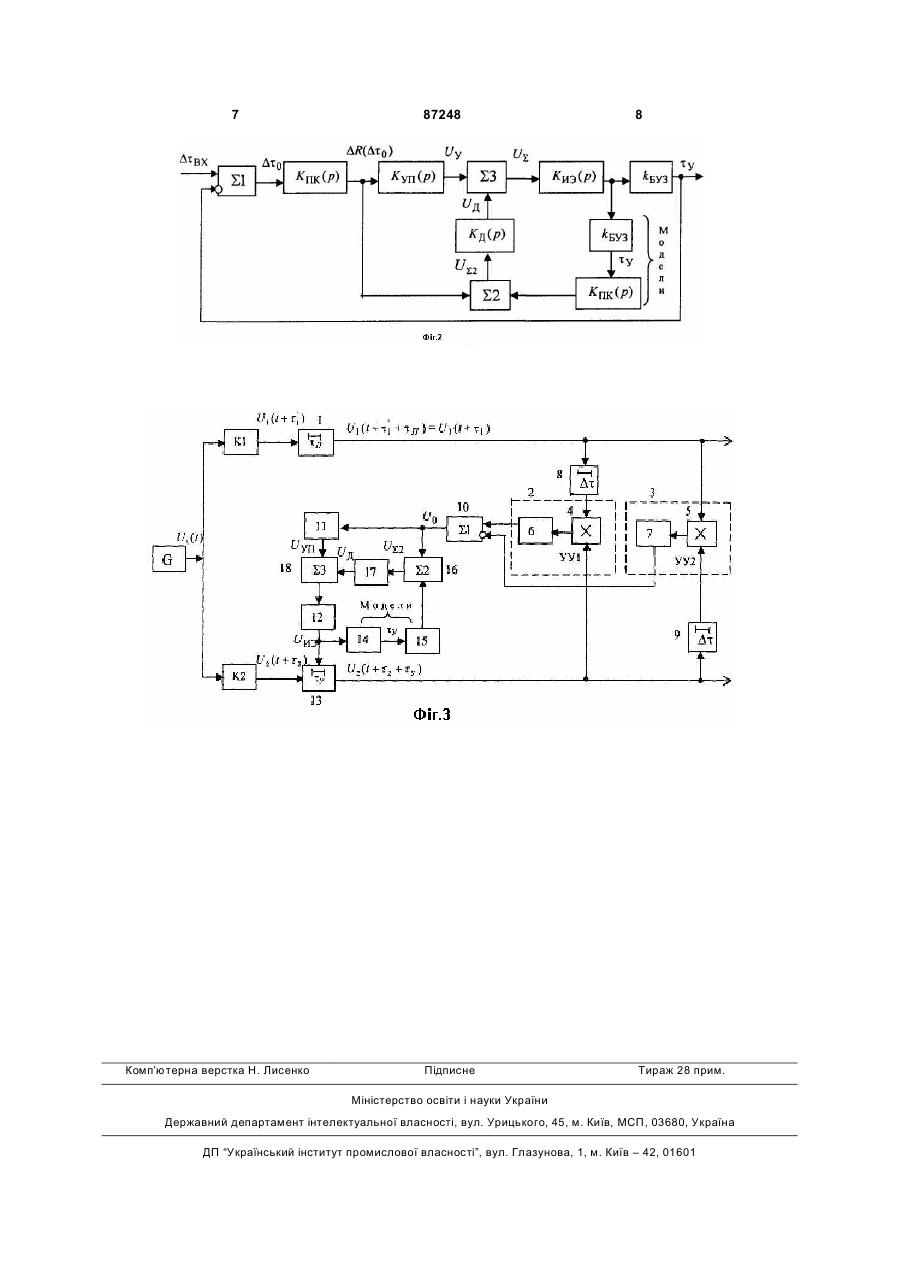
Кореляційна система з диференціальним зв'язком вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, у першому з яких включений блок постійної затримки, вихід якого підключений до першого виходу системи, а також з'єднаний через перший блок затримки на ∆τ з першим входом першого корелятора і безпосередньо з першим входом другого корелятора, перший і другий корелятори складаються з послідовно з'єднаних помножувача і фільтра, що згладжує, вихід другого каналу з'єднаний з першим входом блока керованої затримки, вихід якого підключений до другого виходу системи, а також безпосередньо з'єднаний із другим входом першого корелятора і через другий блок затримки на ∆τ з другим входом другого корелятора, виходи першого і другого кореляторів підключені до пристрою, що віднімає, вихід якого з'єднаний із входом підсилювача-перетворювача, а вихід виконавчого елемента з'єднаний із другим входом блока керованої затримки, який відрізняється тим, що введений диференціальний зв'язок, що складається з динамічних ланок - математичних моделей блока керованої затримки і кореляційного перетворювача, коригувального елемента, двох суматорів, причому перший вхід першого суматора з'єднаний з виходом пристрою, що віднімає, другий його вхід через послідовно з'єднані моделі блока керування затримкою та кореляційного перетворювача з'єднаний з виходом виконавчого елемента, вихід першого суматора через коригувальний елемент з'єднаний з першим входом другого суматора, другий вхід якого з'єднаний з виходом підсилювача-перетворювача, а вихід другого суматора з'єднаний з входом виконавчого елемента.
Текст
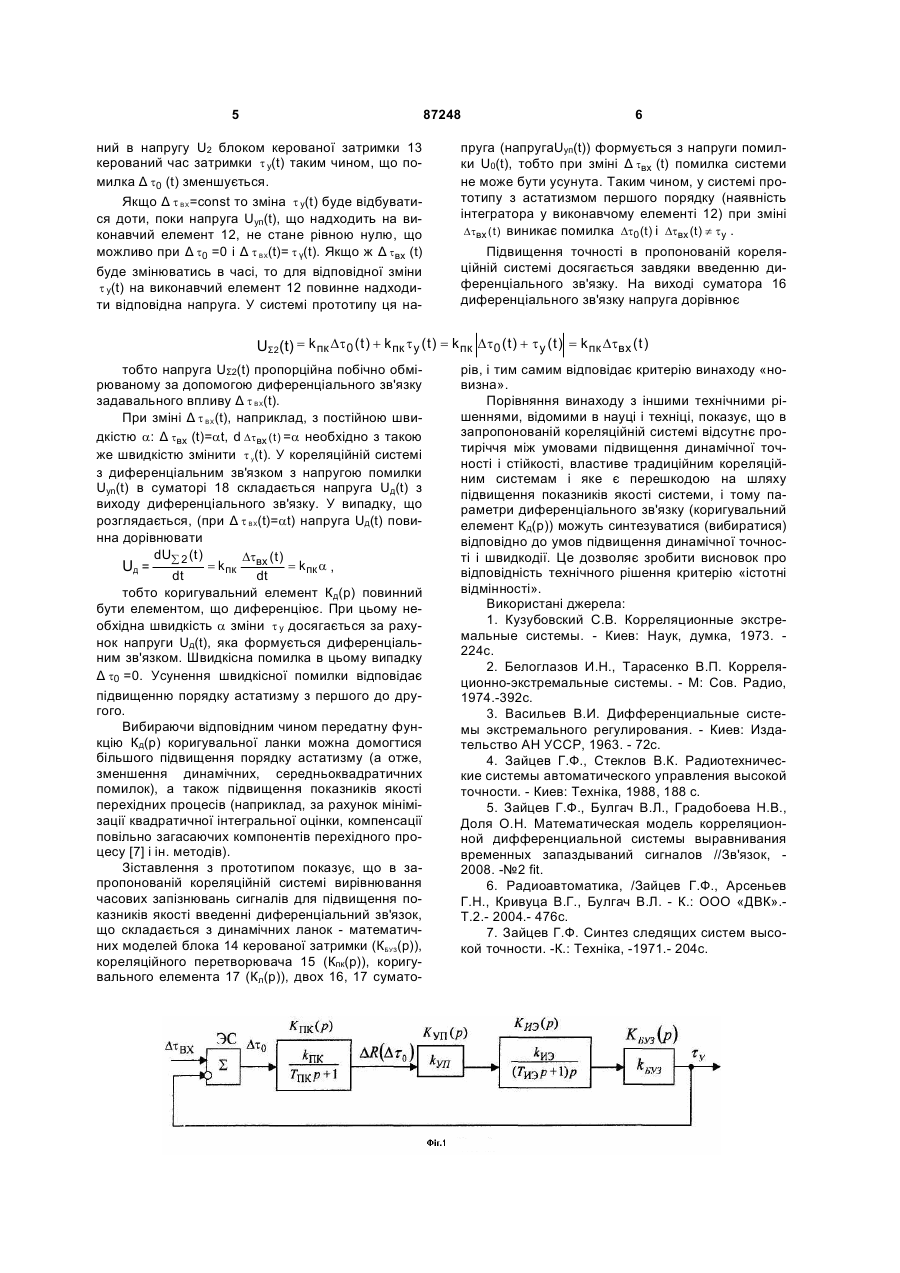
Кореляційна система з диференціальним зв'язком вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, у першому з яких включений блок постійної затримки, вихід якого підключений до першого виходу системи, а також з'єднаний через перший блок затримки на ∆τ з першим входом першого корелятора і безпосередньо з першим входом другого корелятора, перший і другий корелятори складаються з послідовно з'єднаних помножувача і C2 2 87248 1 3 87248 Дана кореляційна диференціальна система вирівнювання часових запізнювань сигналів прийнята за прототип. Недолік системи прототипу полягає в тому, що вона побудована на підставі принципу керування по відхиленню і, як усім системам автоматичного керування цього класу, їй властиве протиріччя між умовами підвищення динамічної точності і стійкості. Це протиріччя є перешкодою на шляху підвищення динамічної точності і швидкодії системи прототипу. Винахід дозволяє зменшити помилки кореляційної диференціальної системи, викликані зміною задавального впливу - різниці часових запізнювань сигналів. Це досягається тим, що в кореляційну диференціальну систему вирівнювання часових запізнювань сигналів, що надходять від одного джерела G по двох каналах К1 і К2 (Фіг.3), що містить блок 1 постійної затримки, корелятори 2 і 3, що складаються відповідно з помножувачів 4 і 5 і фільтрів, що згладжують, 6 і 7, блоки 8 і 9 часової затримки на Δ t , пристрій, що віднімає 10, підсилювач-перетворювач 11, виконавчий елемент 12, блок 13 керованої затримки, уведений диференціальний зв'язок, що складається з динамічних ланок, що представляють собою математичні моделі: КБУЗ(р) - блока керованої затримки 14, Кпк(р) 4 кореляційного перетворювача 15, Кд(р) - коригувального елемента 17, двох суматорів 16 і 18. На Фіг.1 зображена структурна схема кореляційної системи без диференціального зв'язку прототипу ([5] мал.4), на Фіг.2 - з диференціальним зв'язком, на Фіг.3 - схема пропонованої кореляційної системи з диференціальним зв'язком. На Фіг.1-3: К ПК (р )= k ПК Т ПК р +1 - передатна функція кореля ційного перетворювача і його моделі 15; Куп(р)=kуп; Киэ(р)= k иэ ( Тиэр + 1)р ; КБУЗ(р)=kБУЗ - передатні фу нкції підсилювача-перетворювача 11, виконавчого елемента 12, блока керованої затримки 13 і його моделі 14 відповідно, Кд(р) - передатна функція коригувального елемента 17 диференціального зв'язку, визначається у відповідності з умовами підвищення динамічної точності і швидкодії системи. Кореляційна система з диференціальним зв'язком (Фіг.3) відповідно до структурної схеми (Фіг.2) описується рівнянням: 1 + КПК (р)k упКИЭ (р)kБУЗ Dt0 (р) = 1 - КПК (р)КИЭ (р)kБУЗК д (р) DtВХ (р) З рівняння видно, що передатна функція коригувального елемента кд(р) диференціального зв'язку входить тільки в умову інваріантості [7] 1-Кпк(р)Киэ(р)kбузКд(р)=0 і від неї не залежить характеристичне рівняння 1+Кпк(р)kупКиэ(р)kБУЗ=0, тобто не залежить стійкість замкнутої вихідної системи. Тому в кореляційній системі з диференціальним зв'язком відсутнє протиріччя між умовами підвищення динамічної точності і стійкості і диференціальний зв'язок (коригувальний пристрій Кд(р)) можна синтезувати відповідно до тих чи інших умов підвищення показників якості системи. З урахуванням розробленої авторами структурної схеми кореляційної системи (Фіг.2) схема пропонованої кореляційної системи вирівнювання часових запізнювань сигналів з диференціальним зв'язком зображена на Фіг.3. Кореляційна система з диференціальним зв'язком вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, при цьому вихід першого каналу через блок постійної затримки підключений до першого виходу системи, а також до першого входу першого корелятора через перший блок затримки на Δ t і безпосередньо до першого входу другого корелятора; вихід другого каналу з'єднаний з першим входом блока керованої затримки, вихід якого підключений до другого виходу системи, а також безпосередньо до другого входу першого корелятора і через другий блок затримки на Dt до другого входу другого корелятора, а виходи першого і другого кореляторів підключені відповідно до першого (інвертуючого) і другого (неінвертуючого) входів пристрою, що віднімає, вихід якого з'єднаний із входом підсилювача-перетворювача, а також з першим входом першого суматора, до другого входу якого через послідовно з'єднані математичні моделі блока керованої затримки і кореляційного перетворювача підключений вихід виконавчого елемента, що також підключений до другого входу блока керованої затримки, а вхід виконавчого елемента з'єднаний з виходом другого суматора, перший вхід якого з'єднаний з виходом підсилювача-перетворювача, а другий вхід через послідовно з'єднані коригувальний елемент і кореляційний перетворювач з'єднаний з виходом першого суматора. Винахід дозволяє підвищити динамічну точність і швидкодію кореляційної системи вирівнювання часових запізнювань сигналів. Це досягається введенням у кореляційну систему диференціального зв'язку, за допомогою якого здійснюється вимір задавального впливу - різниці часових запізнювань сигналів і необхідне його перетворення. Кореляційна система з диференціальним зв'язком працює в такий спосіб. При виникненні різниці Δ t ΒΧ(t) часових запізнювань напруг U1 і U2 на виході пристрою, що віднімає, 10 виникає напруга помилки [5] U0(t)= D R( D t0 )=kпкΔ t0 , пропорційне помилці системи Δ t0 . Напруга U0(t) через підсилювач - перетворювач 11 надходить у системі прототипі [5] на виконавчий елемент 12, що містить інтегруючу ланку. Під впливом вихідної напруги виконавчого елемента UИЭ(t) змінюється внесе 5 87248 ний в напругу U2 блоком керованої затримки 13 керований час затримки t у(t) таким чином, що помилка Δ t0 (t) зменшується. Якщо Δ t ΒΧ=const то зміна t у(t) буде відбуватися доти, поки напруга Uyп(t), що надходить на виконавчий елемент 12, не стане рівною нулю, що можливо при Δ t0 =0 і Δ t ΒΧ(t)= t γ(t). Якщо ж Δ tвх (t) буде змінюватись в часі, то для відповідної зміни t у(t) на виконавчий елемент 12 повинне надходити відповідна напруга. У системі прототипу ця на 6 пруга (напругаUуп(t)) формується з напруги помилки U0(t), тобто при зміні Δ tвх (t) помилка системи не може бути усунута. Таким чином, у системі прототипу з астатизмом першого порядку (наявність інтегратора у виконавчому елементі 12) при зміні Dtвх ( t ) виникає помилка Dt0 (t ) і Dtвх (t ) ¹ t у . Підвищення точності в пропонованій кореляційній системі досягається завдяки введенню диференціального зв'язку. На виході суматора 16 диференціального зв'язку напруга дорівнює UΣ2(t) = k пк Dt0 ( t ) + k пк t у ( t ) = k пк Dt0 ( t ) + t у ( t ) = k пк Dtвх ( t ) тобто напруга UΣ2(t) пропорційна побічно обмірюваному за допомогою диференціального зв'язку задавального впливу Δ t ΒΧ(t). При зміні Δ t ΒΧ(t), наприклад, з постійною швидкістю a: Δ tвх (t)=at, d Dtвх ( t ) =a необхідно з такою же швидкістю змінити t у(t). У кореляційній системі з диференціальним зв'язком з напругою помилки Uyn(t) в суматорі 18 складається напруга Uд(t) з виходу диференціального зв'язку. У випадку, що розглядається, (при Δ t ΒΧ(t)=at) напруга Uд(t) повинна дорівнювати dU 2 (t ) Dt ( t ) = k пк вх = k пк a , Uд = å dt dt тобто коригувальний елемент Кд(р) повинний бути елементом, що диференціює. При цьому необхідна швидкість a зміни t у досягається за рахунок напруги Uд(t), яка формується диференціальним зв'язком. Швидкісна помилка в цьому випадку Δ t0 =0. Усунення швидкісної помилки відповідає підвищенню порядку астатизму з першого до другого. Вибираючи відповідним чином передатну функцію Кд(р) коригувальної ланки можна домогтися більшого підвищення порядку астатизму (а отже, зменшення динамічних, середньоквадратичних помилок), а також підвищення показників якості перехідних процесів (наприклад, за рахунок мінімізації квадратичної інтегральної оцінки, компенсації повільно загасаючих компонентів перехідного процесу [7] і ін. методів). Зіставлення з прототипом показує, що в запропонованій кореляційній системі вирівнювання часових запізнювань сигналів для підвищення показників якості введенні диференціальний зв'язок, що складається з динамічних ланок - математичних моделей блока 14 керованої затримки (КБУЗ(р)), кореляційного перетворювача 15 (Кпк(р)), коригувального елемента 17 (Кл(р)), двох 16, 17 сумато рів, і тим самим відповідає критерію винаходу «новизна». Порівняння винаходу з іншими технічними рішеннями, відомими в науці і техніці, показує, що в запропонованій кореляційній системі відсутнє протиріччя між умовами підвищення динамічної точності і стійкості, властиве традиційним кореляційним системам і яке є перешкодою на шляху підвищення показників якості системи, і тому параметри диференціального зв'язку (коригувальний елемент Кд(р)) можуть синтезуватися (вибиратися) відповідно до умов підвищення динамічної точності і швидкодії. Це дозволяє зробити висновок про відповідність технічного рішення критерію «істотні відмінності». Використані джерела: 1. Кузубовский С.В. Корреляционные экстремальные системы. - Киев: Наук, думка, 1973. 224с. 2. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. - М: Сов. Радио, 1974.-392с. 3. Васильев В.И. Дифференциальные системы экстремального регулирования. - Киев: Издательство АН УССР, 1963. - 72с. 4. Зайцев Г.Ф., Стеклов В.К. Радиотехнические системы автоматического управления высокой точности. - Киев: Техніка, 1988, 188 с. 5. Зайцев Г.Ф., Булгач В.Л., Градобоева Н.В., Доля О.Н. Математическая модель корреляционной дифференциальной системы выравнивания временных запаздываний сигналов //Зв'язок, 2008. -№2 fit. 6. Радиоавтоматика, /Зайцев Г.Ф., Арсеньев Г.Н., Кривуца В.Г., Булгач В.Л. - К.: ООО «ДВК».Т.2.- 2004.- 476с. 7. Зайцев Г.Ф. Синтез следящих систем высокой точности. -К.: Техніка, -1971.- 204с. 7 Комп’ютерна верстка Н. Лиcенко 87248 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCorrelation system with differential link for leveling time delays of signals
Автори англійськоюZaitsev Hryhorii Frolovych, Bulhach Viktor Leonardovych, Hradoboieva Nelia Viktorivna, Dolia Oleh Mykolaiovych
Назва патенту російськоюКорреляционная система с дифференциальной связью выравнивания временных запаздываний сигналов
Автори російськоюЗайцев Григорий Фролович, Булгач Виктор Леонардович, Градобоева Неля Викторовна, Доля Олег Николаевич
МПК / Мітки
МПК: G01S 7/40
Мітки: система, зв'язком, вирівнювання, диференціальним, сигналів, запізнювань, кореляційна, часових
Код посилання
<a href="https://ua.patents.su/4-87248-korelyacijjna-sistema-z-diferencialnim-zvyazkom-virivnyuvannya-chasovikh-zapiznyuvan-signaliv.html" target="_blank" rel="follow" title="База патентів України">Кореляційна система з диференціальним зв’язком вирівнювання часових запізнювань сигналів</a>
Пристрій для множення довжин часових інтервалів
Номер патенту: 53731
Опубліковано: 17.02.2003
Автори: Станчук Катерина Іванівна, Кожем'яко Володимир Прокопович, Мохамед Ель-Хатиб, Павлов Сергій Володимирович
Мітки: інтервалів, довжин, множення, пристрій, часових
Формула / Реферат:
1. Пристрій для множення довжин часових інтервалів, що містить два елементи І, два лічильники, який відрізняється тим, що в нього введений блок обчислення результату, перші N входів якого підключені до відповідних виходів першого лічильника, а другі М входів - до відповідних виходів другого лічильника, лічильний вхід якого підключений до виходу другого елемента І, перший вхід якого з'єднаний з першим входом першого елемента І і входом...
Система керування
Номер патенту: 66917
Опубліковано: 15.06.2004
Автори: Чигирин Юрій Трохимович, Чигирин Олег Трохимович, Маранов Олександр Вікторович
МПК: G06F 11/00, G06F 11/16
Формула / Реферат:
Система керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом системи керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Перетворювач радіоімпульсних сигналів в двійкові коди
Номер патенту: 74364
Опубліковано: 15.12.2005
Автори: Проць Богдан Іванович, Клепфер Євген Іванович
МПК: H03M 1/00
Мітки: коді, двійкові, перетворювач, радіоімпульсних, сигналів
Формула / Реферат:
Перетворювач радіоімпульсних сигналів в двійкові коди, який містить квадратурний перетворювач, перший і другий аналого-цифрові перетворювачі, виходи яких і вхід квадратурного перетворювача є відповідно виходами і входом перетворювача радіоімпульсних сигналів в двійкові коди, який відрізняється тим, що в нього введені генератор гармонійного опорного сигналу, фазоповертач, амплітудний детектор, пристрій керування, перший і другий комутатори,...
Вимірювач часових інтервалів
Номер патенту: 6414
Опубліковано: 29.12.1994
Автор: Дем'янчук Тарас Михайлович
МПК: G04F 10/00
Мітки: часових, інтервалів, вимірювач
Формула / Реферат:
(57) Измеритель временных интервалов, содержащий секционированную линию задержки и счетчик, выход которого является выходом устройства, отличающийся тем, что в него введены элемент И—НЕ, n-триггеров с защелкой, n коммутаторов, приоритетный шифратор и кодопреобразователь, выходы которого являются младшими разрядами выхода измерителя, основные входы подключены, соответственно, к выходам приоритетного шифратора, а вспомогательный вход подключен...
Система прогнозування часових рядів фінансово-економічних показників
Номер патенту: 45536
Опубліковано: 15.04.2002
Автори: Садовніков Олександр Олексійович, Бурдюк Ігор Володимирович, Ходоренко Юрій Сільвестрович, Красін Леонід Абрамович
МПК: G06Q 90/00
Мітки: показників, рядів, прогнозування, часових, фінансово-економічних, система
Формула / Реферат:
Система прогнозування часових рядів фінансово-економічних показників, яка містить в собі послідовно з'єднані блок пам'яті для зберігання багатомірних часових рядів даних, блок інтерактивного завдання вихідних даних для здійснення вибирання потрібного одномірного часового ряду по запиту користувача, блок вибирання необхідних для прогнозування даних за ретроспективний період часу, блок інтерактивного завдання періоду прогнозування, блок...
Попередній патент: Спосіб травлення металів
Наступний патент: Пристрій для нагрівання прокату
Випадковий патент: Спосіб автоматизації оцінки точності розв'язання крайових задач