Спосіб розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами
Номер патенту: 89677
Опубліковано: 25.04.2014
Автори: Надикто Володимир Трохимович, Улексін Василь Олексійович, Кувачов Володимир Петрович

Формула / Реферат
Спосіб розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами, що включає поворот мотор-коліс, зв'язаних між собою тягами поперечної трапеції і поворотними важелями, до перетинання їх осей обертання з подальшим включенням приводу мотор-коліс для здійснення розвороту транспортного засобу, який відрізняється тим, що поворот мотор-коліс здійснюють за рахунок примусової зміни довжини телескопічної поперечної тяги трапеції, яка повертає мотор-колеса у взаємно протилежних напрямках відносно поздовжньої осі транспортного засобу.
Текст
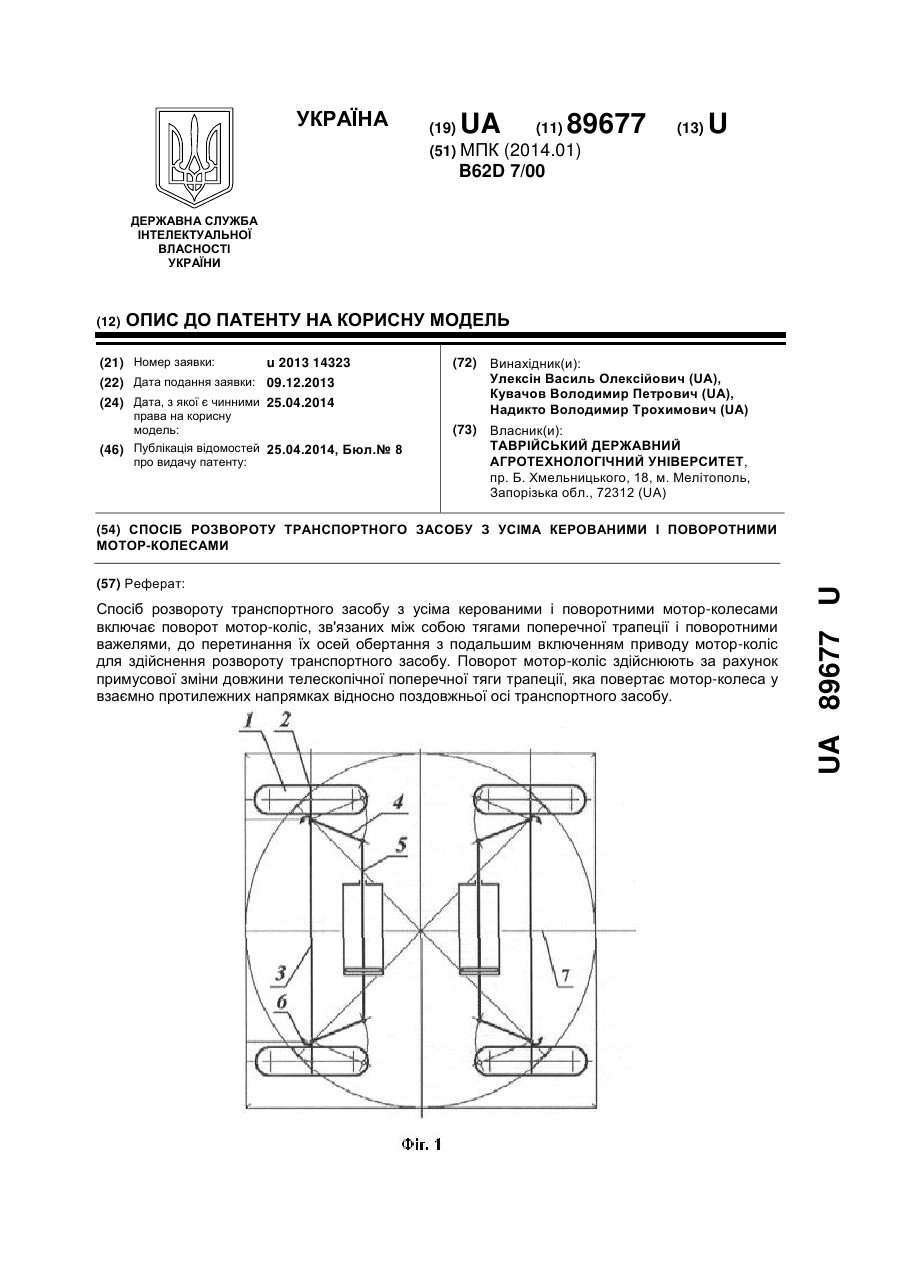
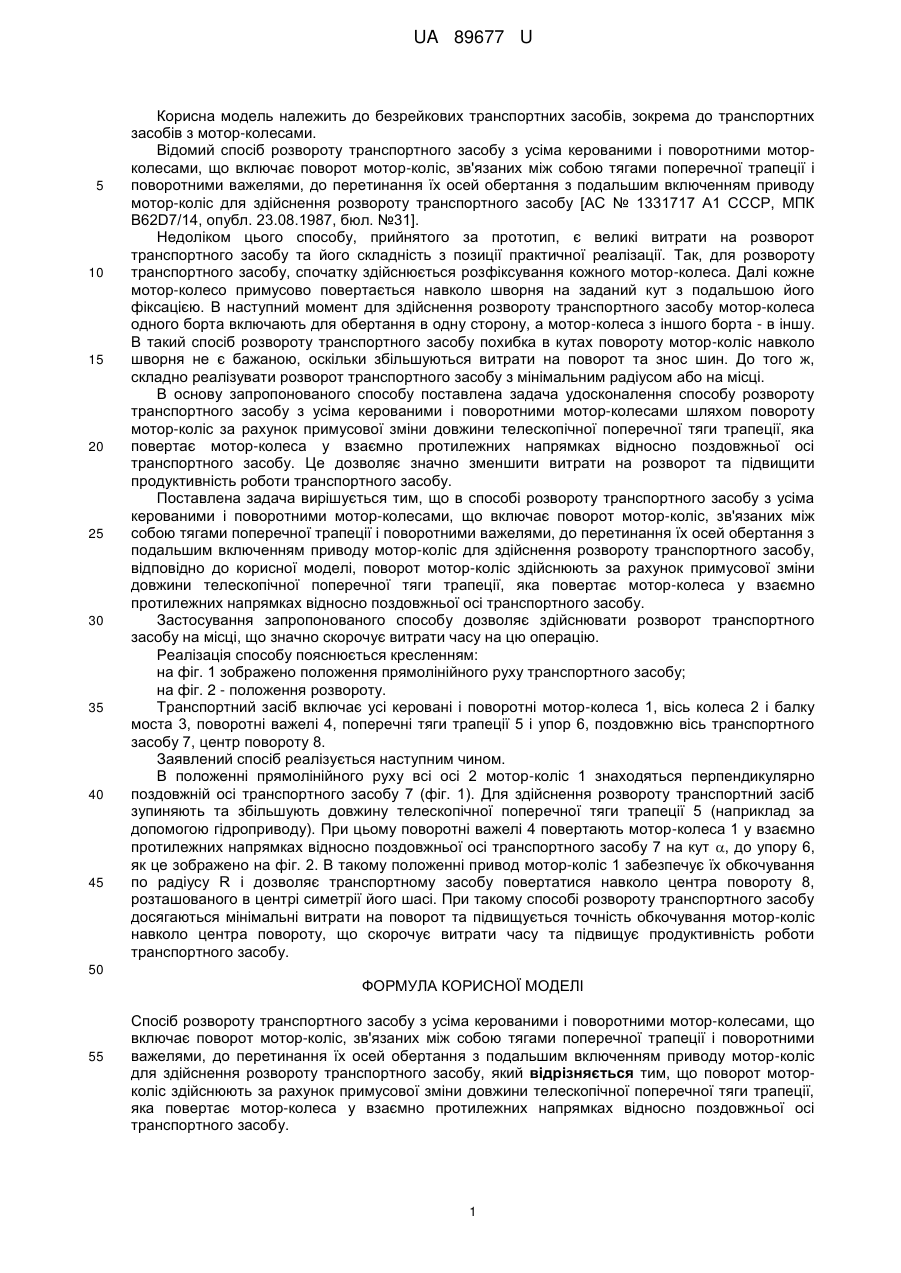
Реферат: Спосіб розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами включає поворот мотор-коліс, зв'язаних між собою тягами поперечної трапеції і поворотними важелями, до перетинання їх осей обертання з подальшим включенням приводу мотор-коліс для здійснення розвороту транспортного засобу. Поворот мотор-коліс здійснюють за рахунок примусової зміни довжини телескопічної поперечної тяги трапеції, яка повертає мотор-колеса у взаємно протилежних напрямках відносно поздовжньої осі транспортного засобу. UA 89677 U (54) СПОСІБ РОЗВОРОТУ ТРАНСПОРТНОГО ЗАСОБУ З УСІМА КЕРОВАНИМИ І ПОВОРОТНИМИ МОТОР-КОЛЕСАМИ UA 89677 U UA 89677 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до безрейкових транспортних засобів, зокрема до транспортних засобів з мотор-колесами. Відомий спосіб розвороту транспортного засобу з усіма керованими і поворотними моторколесами, що включає поворот мотор-коліс, зв'язаних між собою тягами поперечної трапеції і поворотними важелями, до перетинання їх осей обертання з подальшим включенням приводу мотор-коліс для здійснення розвороту транспортного засобу [АС № 1331717 А1 СССР, МПК B62D7/14, опубл. 23.08.1987, бюл. №31]. Недоліком цього способу, прийнятого за прототип, є великі витрати на розворот транспортного засобу та його складність з позиції практичної реалізації. Так, для розвороту транспортного засобу, спочатку здійснюється розфіксування кожного мотор-колеса. Далі кожне мотор-колесо примусово повертається навколо шворня на заданий кут з подальшою його фіксацією. В наступний момент для здійснення розвороту транспортного засобу мотор-колеса одного борта включають для обертання в одну сторону, а мотор-колеса з іншого борта - в іншу. В такий спосіб розвороту транспортного засобу похибка в кутах повороту мотор-коліс навколо шворня не є бажаною, оскільки збільшуються витрати на поворот та знос шин. До того ж, складно реалізувати розворот транспортного засобу з мінімальним радіусом або на місці. В основу запропонованого способу поставлена задача удосконалення способу розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами шляхом повороту мотор-коліс за рахунок примусової зміни довжини телескопічної поперечної тяги трапеції, яка повертає мотор-колеса у взаємно протилежних напрямках відносно поздовжньої осі транспортного засобу. Це дозволяє значно зменшити витрати на розворот та підвищити продуктивність роботи транспортного засобу. Поставлена задача вирішується тим, що в способі розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами, що включає поворот мотор-коліс, зв'язаних між собою тягами поперечної трапеції і поворотними важелями, до перетинання їх осей обертання з подальшим включенням приводу мотор-коліс для здійснення розвороту транспортного засобу, відповідно до корисної моделі, поворот мотор-коліс здійснюють за рахунок примусової зміни довжини телескопічної поперечної тяги трапеції, яка повертає мотор-колеса у взаємно протилежних напрямках відносно поздовжньої осі транспортного засобу. Застосування запропонованого способу дозволяє здійснювати розворот транспортного засобу на місці, що значно скорочує витрати часу на цю операцію. Реалізація способу пояснюється кресленням: на фіг. 1 зображено положення прямолінійного руху транспортного засобу; на фіг. 2 - положення розвороту. Транспортний засіб включає усі керовані і поворотні мотор-колеса 1, вісь колеса 2 і балку моста 3, поворотні важелі 4, поперечні тяги трапеції 5 і упор 6, поздовжню вісь транспортного засобу 7, центр повороту 8. Заявлений спосіб реалізується наступним чином. В положенні прямолінійного руху всі осі 2 мотор-коліс 1 знаходяться перпендикулярно поздовжній осі транспортного засобу 7 (фіг. 1). Для здійснення розвороту транспортний засіб зупиняють та збільшують довжину телескопічної поперечної тяги трапеції 5 (наприклад за допомогою гідроприводу). При цьому поворотні важелі 4 повертають мотор-колеса 1 у взаємно протилежних напрямках відносно поздовжньої осі транспортного засобу 7 на кут , до упору 6, як це зображено на фіг. 2. В такому положенні привод мотор-коліс 1 забезпечує їх обкочування по радіусу R і дозволяє транспортному засобу повертатися навколо центра повороту 8, розташованого в центрі симетрії його шасі. При такому способі розвороту транспортного засобу досягаються мінімальні витрати на поворот та підвищується точність обкочування мотор-коліс навколо центра повороту, що скорочує витрати часу та підвищує продуктивність роботи транспортного засобу. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 Спосіб розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами, що включає поворот мотор-коліс, зв'язаних між собою тягами поперечної трапеції і поворотними важелями, до перетинання їх осей обертання з подальшим включенням приводу мотор-коліс для здійснення розвороту транспортного засобу, який відрізняється тим, що поворот моторколіс здійснюють за рахунок примусової зміни довжини телескопічної поперечної тяги трапеції, яка повертає мотор-колеса у взаємно протилежних напрямках відносно поздовжньої осі транспортного засобу. 1 UA 89677 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюUleksin Vasyl Oleksiiovych, Kuvachov Volodymyr Petrovych, Nadykto Volodymyr Trokhymovych
Автори російськоюУлексин Василий Алексеевич, Кувачов Владимир Петрович, Надикто Владимир Трофимович
МПК / Мітки
МПК: B62D 7/00
Мітки: розвороту, поворотними, усіма, засобу, мотор-колесами, спосіб, керованими, транспортного
Код посилання
<a href="https://ua.patents.su/4-89677-sposib-rozvorotu-transportnogo-zasobu-z-usima-kerovanimi-i-povorotnimi-motor-kolesami.html" target="_blank" rel="follow" title="База патентів України">Спосіб розвороту транспортного засобу з усіма керованими і поворотними мотор-колесами</a>
Рульове керування транспортного засобу з усіма керованими колесами
Номер патенту: 76319
Опубліковано: 17.07.2006
Автори: Артюшенко Анатолій Дмитрович, Козаченко Олексій Васильович, Нечуйвітер Володимир Леонідович, Нечуйвітер Леонід Іванович
МПК: B62D 7/14
Мітки: рульове, керованими, засобу, усіма, колесами, транспортного, керування
Формула / Реферат:
1. Рульове керування транспортного засобу зі всіма керованими колесами, яке включає рульове колесо з валом, рульовий механізм із сошкою, передні та задні керовані колеса з поворотними цапфами та передній і задній багаторежимні механізми, яке відрізняється тим, що між переднім та заднім рульовими багаторежимними механізмами введено механізм перемикання режимів роботи рульового керування таким чином, що на ведучому вала з жорстко закріпленим...
Рульове управління транспортного засобу з усіма керованими колесами
Номер патенту: 9938
Опубліковано: 30.09.1996
Автор: Прогляда Леонід Петрович
Мітки: усіма, транспортного, колесами, управління, рульове, керованими, засобу
Формула / Реферат:
(57) Рулевое управление транспортного средства со всеми управляемыми колесами, содержащее рулевой механизм, соединенный гидравлически с полостями исполнительных гидроцилидров поворота передних колес и через устройство переключения схемы поворота задних колес с полостями исполнительных гидроцилиндров поворота задних колес, отличающееся тем, что оно снабжено главным и дополнительным гидроцилиндрами, подвижные части которых кинематически...
Рульове управління транспортного засобу з чотирма керованими колесами
Номер патенту: 54950
Опубліковано: 17.03.2003
Автори: Буслов Володимир Кузьмович, Лисенко Володимир Сергійович, Яхно Олег Михайлович, Таурит Тетяна Георгіївна, Кравченко Віктор Леонович
МПК: B62D 5/06
Мітки: засобу, управління, колесами, рульове, транспортного, керованими, чотирма
Формула / Реферат:
1. Рульове управління транспортного засобу з чотирма керованими колесами, що містить в собі гідроруль, з'єднаний напірною гідролінією з насосом та зливною гідролінією з гідробаком, гідравлічно зв'язані з ним гідроциліндри повороту коліс переднього та заднього мостів, чотирилінійний трипозиційний гідророзподільник режиму управління з органами управління, виконаний з можливістю з'єднання його першої та другої гідроліній, а також третьої та...
Транспортний засіб з усіма керованими колесами

Номер патенту: 27832
Опубліковано: 16.10.2000
Автор: Гренадер Михайло Юхимович
МПК: B62D 7/14
Мітки: засіб, колесами, усіма, керованими, транспортний
Текст:
...согласования - в виде дополнительных резисторов, обеспечивающих линейную апроксимацию требуемых зависимостей между углами поворота колёс. Переключатель режимов криволинейного и плоскопараллельного маневрирования, преимущественно, размещён на корпусе рулевого устройства и выполнен в виде двух крестообразно расположенных пазов с возможностью перемещения в них рулевого рычага при его отклонении от исходного положения. При этом один из пазов...
Спосіб прокладання постійної технологічної колії колесами транспортного засобу

Номер патенту: 58912
Опубліковано: 26.04.2011
Автори: Кувачов Володимир Петрович, Надикто Володимир Трохимович
МПК: A01B 79/00
Мітки: постійної, технологічної, засобу, колесами, колії, прокладання, транспортного, спосіб
Формула / Реферат:
Спосіб прокладання постійної технологічної колії, що включає залишення на ґрунті незагорнутих слідів коліс транспортного засобу під час виконання сільськогосподарської технологічної операції, який відрізняється тим, що прокладають борозну з шириною сліду на ґрунті після проходу транспортного засобу більше ширини відбитка одного колеса на величину технологічного допуску.
Попередній патент: Спосіб деполяризаційної діагностики доліхосигми
Наступний патент: Мобільний енергетичний засіб з гідравлічним приводом розпушувачів ґрунту
Випадковий патент: Спосіб визначення критерію оцінки ліпідних порушень в жовчі у дітей з холелітіазом