Транспортний засіб з усіма керованими колесами

Текст
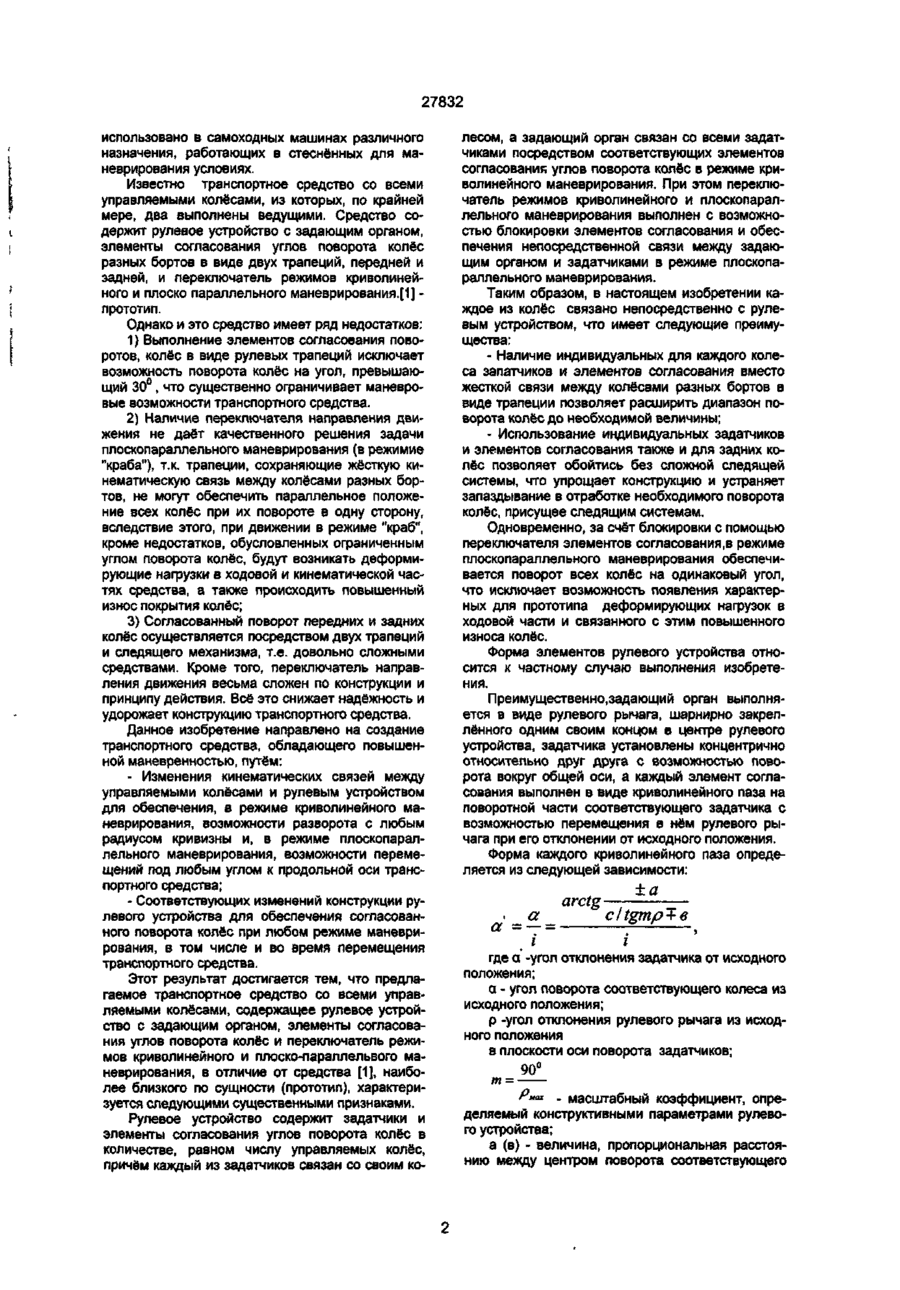
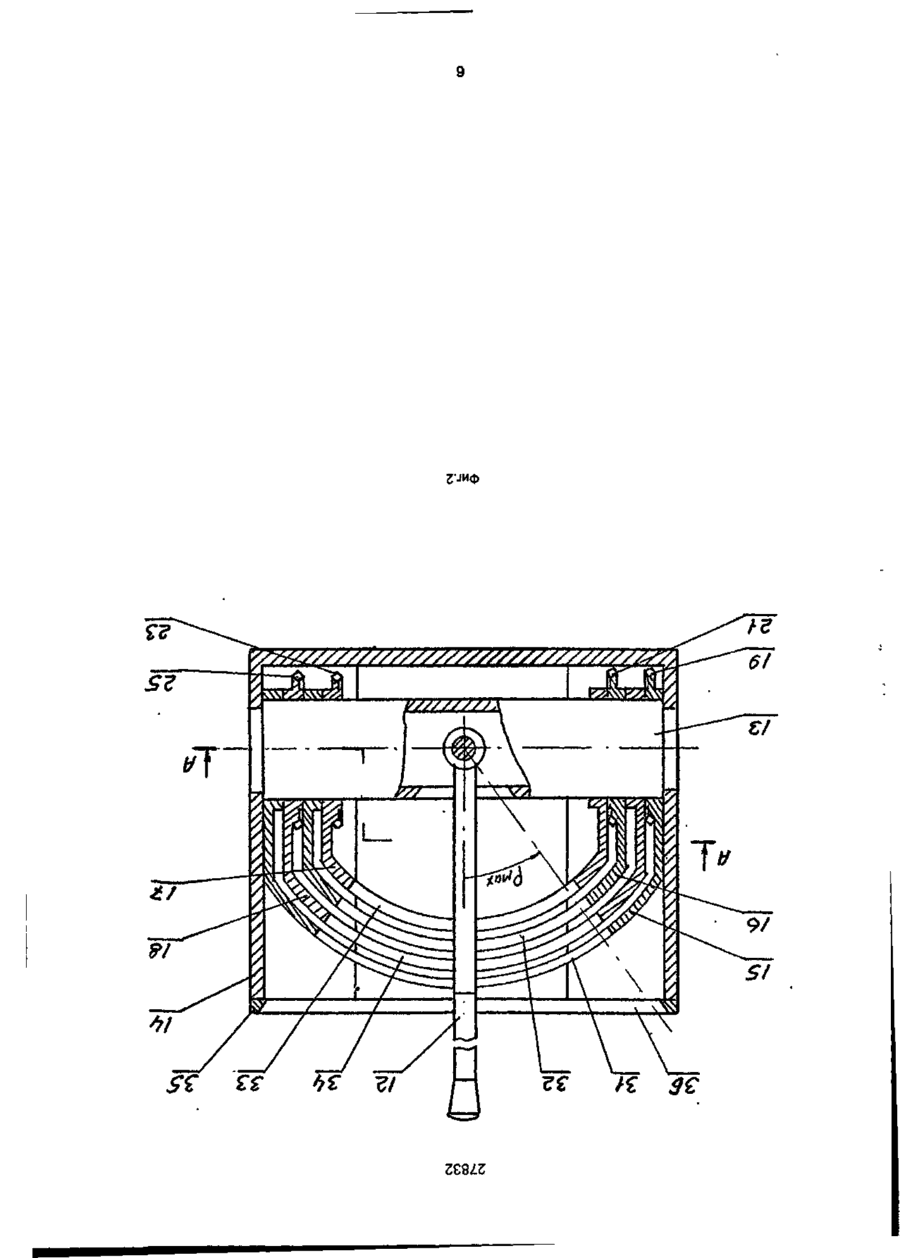
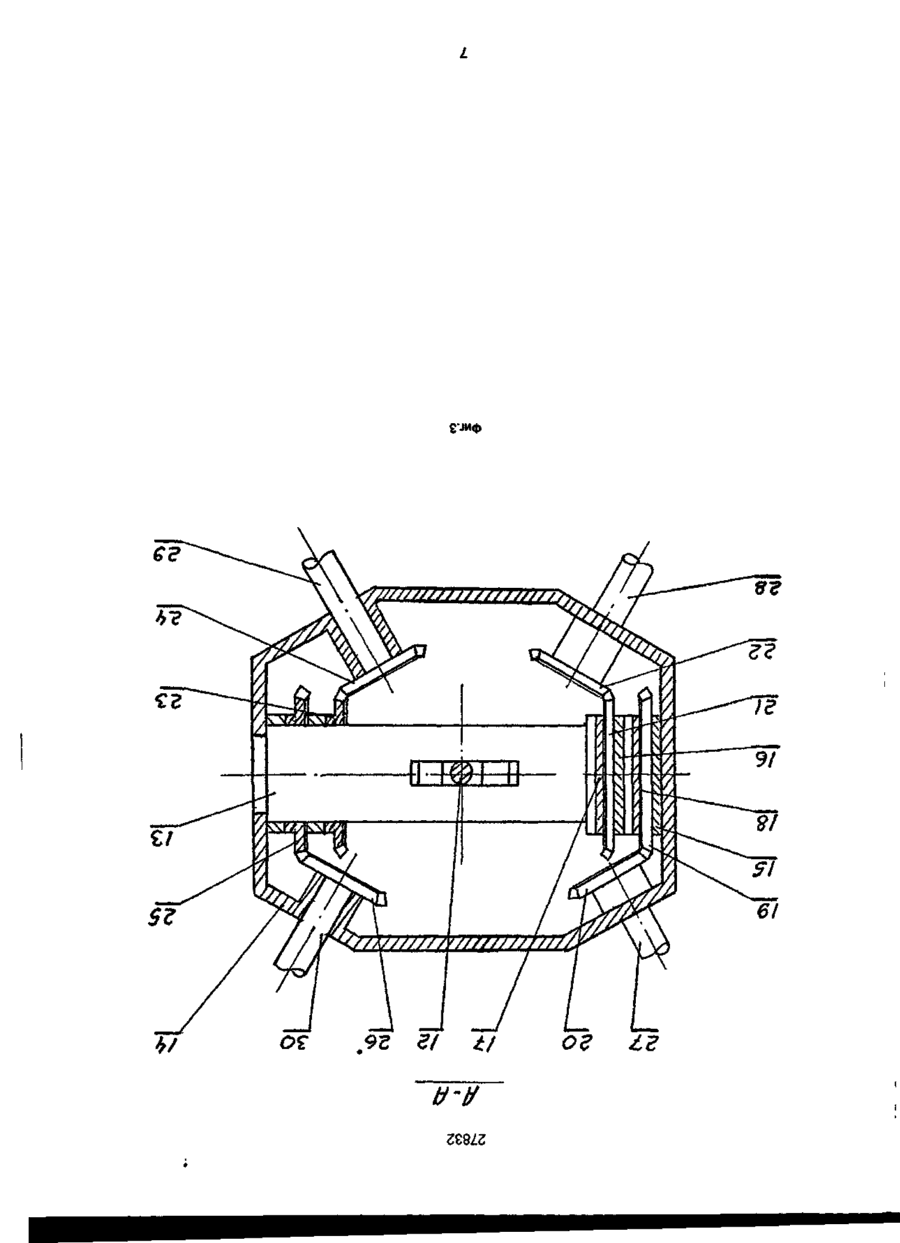
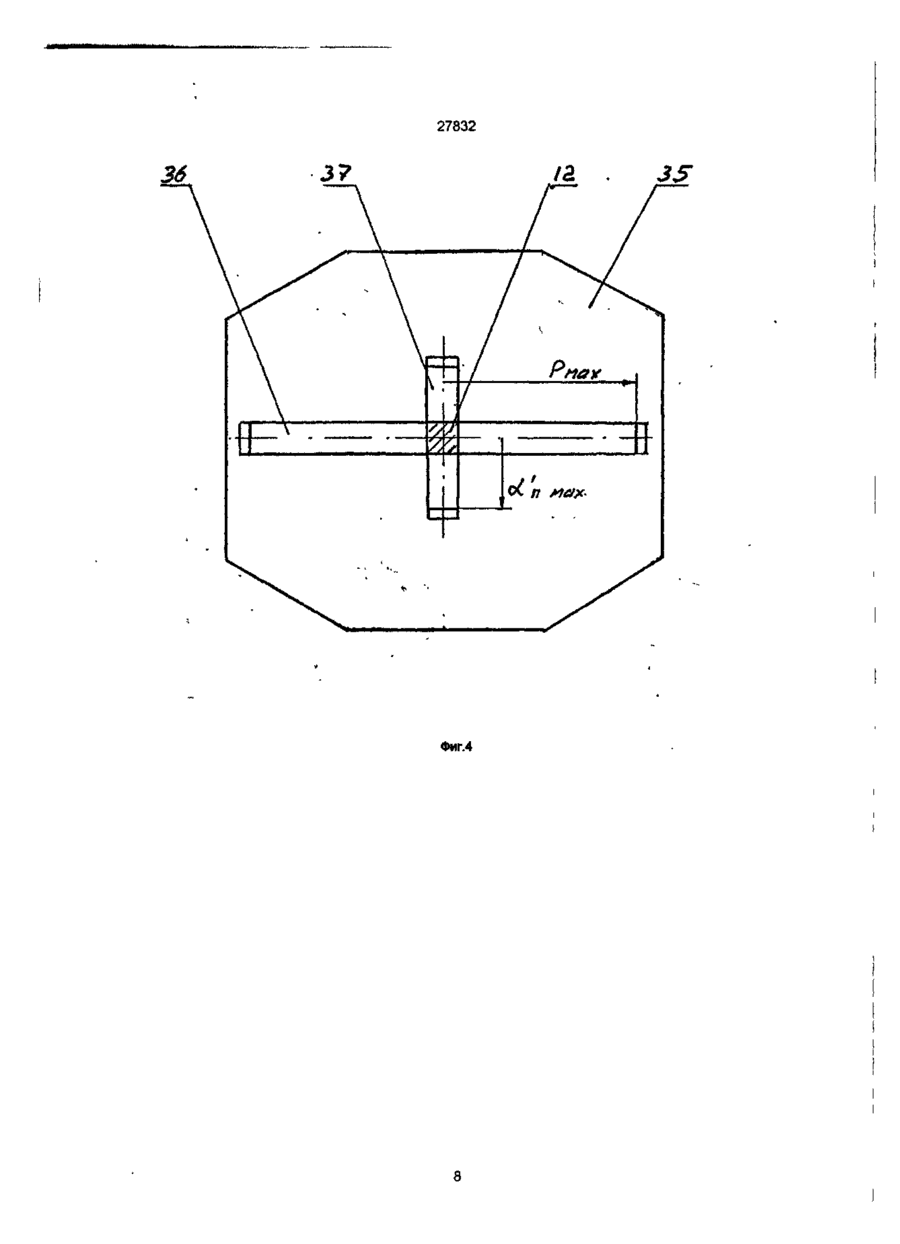
1. Транспортное средство со всеми управляемыми колесами, содержащее рулевое устройство с задающим органом, элементы согласования углов поворота колес и переключатель режимов криволинейного и плоскопараллельного маневрирования, отличающееся тем, что рулевое устройство содержит задатчики и элементы согласования поворотом колес в количестве, равном числу управляемых колес, причем каждый из задатчиков связан со своим колесом, задающий орган связан со своими задатчиками посредством соответствующих элементов согласования углов поворота колес в режиме криволинейного маневрирования, а переключатель режимов криволинейного и плоскопараллельного маневрирования выполнен с возможностью блокировки элементов согласования и обеспечения в режиме плоскопараллельного маневрирования непосредственной связи между задающим органом и задатчиками. 2. Транспортное средство по п.1, отличающееся тем, что задающий орган выполнен в виде рулевого очага, шарнирно закрепленного одним своим концом в центре рулевого устройства, задатчики установлены концентрично относительно друг друга с возможностью поворота вокруг общей оси, а каждый елемент согласования выполнен в виде криволинейного паза на поворотной части соответствующего задатчика с возможностью перемещения в нем рулевого рычага при его отклонении от исходного положения, причем форма каждого криволинейного паза определена следующей зависимостью: arctg ±а С *=?- = -ТЪ tgmp і Изобретение относится к безрельсовым на где а - угол отклонения задатчика от исходного положения; а - угол поворота соответствующего колеса из исходного положения; 5- угол отклонения рулевого рычага от исходного положения в плоскости оси поворота задатчиков, 90° т = р max - масштабный коэффициент, определяемый конструктивными параметрами рулевого устройства; а- величина, пропорциональная расстоянию между центром поворота соответствующего задатчику колеса и поперечной осью транспортного средства, проходящей через центр разворота транспортного средства при режиме криволинейного маневрирования; b - величина, пропорциональная расстоянию между центром поворота соответствующего задатчику колеса и продольной осью транспортного средсва; с - масштабный параметр, определяющий характер изменения радиуса кривизны разворота транспортного средства; Ь 90° + arctg a max а ar'max а max - передаточное отношение между максимальными значениями углов поворота колеса и соответсвующего ему задатчика. 3. Транспортное средство по п. 1 или 2, отличающееся тем, что переключатель режимов криволинейного и плоскопараллельного маневрирования размещен на корпусе рулевого устройства и выполнен в виде двух крестообразно расположенных пазов с возможностью перемещения в них рулевого рычага при его отклонении от исходного положения, причем, один из пазов расположен параллельно оси разворота задатчиков и его длина соответствует развороту колес на максимальные углы в режиме криволинейного маневрирования, а длина поперечного ему паза соответствует развороту колес на максимальные углы в режиме плоскопараллельного маневрирования. земным транспортным средствам и может быть СМ О см со 00 см о> г 27832 использовано в самоходных машинах различного назначения, работающих в стеснённых для маневрирования условиях. Известно транспортное средство со всеми управляемыми колёсами, из которых, по крайней мере, два выполнены ведущими. Средство содержит рулевое устройство с задающим органом, элементы согласования углов поворота колёс разных бортов в виде двух трапеций, передней и задней, и переключатель режимов криволинейного и плоско параллельного маневрирования.[1] прототип. Однако и это средство имеет ряд недостатков: 1) Выполнение элементов согласования поворотов, колёс в виде рулевых трапеций исключает возможность поворота колёс на угол, превышающий 30°, что существенно ограничивает маневровые возможности транспортного средства. 2) Наличие переключателя направления движения не даёт качественного решения задачи плоскопараллельного маневрирования (в режимие "краба"), т.к. трапеции, сохраняющие жёсткую кинематическую связь между колёсами разных бортов, не могут обеспечить параллельное положение всех колёс при их повороте в одну сторону, вследствие этого, при движении в режиме "краб", кроме недостатков, обусловленных ограниченным углом поворота колёс, будут возникать деформирующие нагрузки в ходовой и кинематической частях средства, а также происходить повышенный износ покрытия колёс; 3) Согласованный поворот передних и задних колёс осуществляется посредством двух трапеций и следящего механизма, т.е. довольно сложными средствами. Кроме того, переключатель направления движения весьма сложен по конструкции и принципу действия. Всё это снижает надёжность и удорожает конструкцию транспортного средства. Данное изобретение направлено на создание транспортного средства, обладающего повышенной маневренностью, путём: - Изменения кинематических связей между управляемыми колёсами и рулевым устройством для обеспечения, в режиме криволинейного маневрирования, возможности разворота с любым радиусом кривизны и, в режиме плоскопараллельного маневрирования, возможности перемещений под любым углом к продольной оси транспортного средства; - Соответствующих изменений конструкции рулевого устройства для обеспечения согласованного поворота колёс при любом режиме маневрирования, в том числе и во время перемещения транспортного средства. Этот результат достигается тем, что предлагаемое транспортное средство со всеми управляемыми колёсами, содержащее рулевое устройство с задающим органом, элементы согласования углов поворота колёс и переключатель режимов криволинейного и плоско-параллельвого маневрирования, в отличие от средства [1], наиболее близкого по сущности (прототип), характеризуется следующими существенными признаками. Рулевое устройство содержит задатчики и элементы согласования углов поворота колёс в количестве, равном числу управляемых колёс, причём каждый из задатчиков связан со своим ко лесом, а задающий орган связан со всеми задатчиками посредством соответствующих элементов согласования углов поворота колёс в режиме криволинейного маневрирования. При этом переключатель режимов криволинейного и плоскопараллельного маневрирования выполнен с возможностью блокировки элементов согласования и обеспечения непосредственной связи между задающим органом и задатчиками в режиме плоскопараллельного маневрирования. Таким образом, в настоящем изобретении каждое из колёс связано непосредственно с рулевым устройством, что имеет следующие преимущества: - Наличие индивидуальных для каждого колеса запатчиков и элементов согласования вместо жесткой связи между колёсами разных бортов в виде трапеции позволяет расширить диапазон поворота колёс до необходимой величины; - Использование индивидуальных задатчиков и элементов согласования также и для задних колёс позволяет обойтись без сложной следящей системы, что упрощает конструкцию и устраняет запаздывание в отработке необходимого поворота колёс, присущее следящим системам. Одновременно, за счёт блокировки с помощью переключателя элементов согласования,в режиме плоскопараллельного маневрирования обеспечивается поворот всех колёс на одинаковый угол, что исключает возможность появления характерных для прототипа деформирующих нагрузок в ходовой части и связанного с этим повышенного износа колёс. Форма элементов рулевого устройства относится к частному случаю выполнения изобретения. Преимущественно,задающий орган выполняется в виде рулевого рычага, шарнирно закреплённого одним своим концом в центре рулевого устройства, задатчика установлены концентрично относительно друг друга с возможностью поворота вокруг общей оси, а каждый элемент согласования выполнен в виде криволинейного паза на поворотной части соответствующего задатчика с возможностью перемещения в нём рулевого рычага при его отклонении от исходного положения. Форма каждого криволинейного паза определяется из следующей зависимости: а arctg ±а cltgmp+e і і где а -угол отклонения задатчика от исходного положения; а - угол поворота соответствующего колеса из исходного положения; р -угол отклонения рулевого рычага из исходного положения в плоскости оси поворота задатчиков; _ 90° Рмах . масштабный коэффициент, определяемый конструктивными параметрами рулевого устройства; а (в) - величина, пропорциональная расстоянию между центром поворота соответствующего 27832 задатчику колеса и поперечной (продольной) осью транспортного средства; с - масштабный параметр, определяющий характер изменения радиуса кривизны разворота транспортного средства; , «г- ..*?+«*% a max а тк _ ПЄрЄДаТОЧНОЄ ОТНО шение между максимальными значениями углов поворота колеса и соответствующего ему задатчика. В принципе, близкий технический результат может быть достигнут с помощью других конструктивных решений, признаки которых эквивалентны вышеприведенной форме выполнения рулевого устройства. Например, задатчики углов поворота могут быть выполнены в виде переменных резисторов, а элементы согласования - в виде дополнительных резисторов, обеспечивающих линейную апроксимацию требуемых зависимостей между углами поворота колёс. Переключатель режимов криволинейного и плоскопараллельного маневрирования, преимущественно, размещён на корпусе рулевого устройства и выполнен в виде двух крестообразно расположенных пазов с возможностью перемещения в них рулевого рычага при его отклонении от исходного положения. При этом один из пазов расположен параллельно оси поворота задатчиков, а его длина соответствует рмах, т.е. развороту колёс на максимальные углы в режиме криволинейного маневрирования. Длина второго, поперечного, паза соответствует а п max, т.е. развороту колёс на максимальные утлы в режиме плоскопараллельного маневрирования. Сущность изобретения поясняется чертежами: Фиг.1 - транспортное средство, вид в плане:, Фиг.2 - рулевое устройство, вертикальный разрез:, Фиг.З - рулевое устройство, вид в плане; разрез АА на фиг.1 Фиг.4 - рулевое устройство, вид в плане на крышку; Фиг.5 - рулевое устройство, вид на фрагменты задатчиков с согласующими пазами; Фиг.6 —11 - схемы поворота колёс при различных положениях рулевого рычага. Транспортное средство (фиг.1) содержит платформу с четырьмя управляемыми ходовыми колёсами 1,2,3,4. Колёса 1 и 3, расположенные по одной из диагоналей платформы, являются ведущими. Колёса 2 и 4, расположенные по другой диагонали, являются ведомыми.Каждое из колёс 1...4, например, кинематически, связано с рулевым устройством 5 посредством соответствующих конических редукторов 6...9. Ведущие колёса 1,3 снабжены соответственно приводами 10,11 тяги. На фиг. 2-5 приведена конструкция рулевого устройства 5 в исходном положении, соответствующем ориентации колёс 1...4 параллельно продольной оси симметрии транспортного средства. Рулевое устройство содержит рулевой рычаг 12, шарнирно закреплённый в центре втулки 13. Втулка 13 установлена в корпусе 14 рулевого устройства с возможностью вращения. На втулке 13 концентричне и с возможностью поворота относи тельно неё размещены задатчики (П-образные) 15... 18 углов поворота колёс. Задатчики 15...18 посредством пар шестерён 19 и 20, 21 и 22, 23 и 24, 25 и 26 и валов 27...30 связаны соответственно с коническими редукторами 6...9 поворота колёс. В средней дугообразной части задатчиков 15...18 выполнены соответственно криволинейные пазы 31...34, а в крышке 35 корпуса рулевого устройства выполнены крестообразно расположенные прямолинейные пазы 36 И 37,выполняющие функцию переключателя режимов криволинейного и плоскопараллельного маневрирования. Верхняя часть рычага 12 представляет собой копирный палец, подвижно связанный с пазами 31...34 задатчиков с пазами 36,37 переключателя режимов криволинейного и плоскопараллельного маневрирования. Точка пересечения пазов 36 и 37 соответствует нахождению рулевого рычага 12 в исходном положении. Паз 36 расположен параллельно оси втулки 13 и предназначен для обеспечения режима криволинейного маневрирования. Длину паза 36 выбирают исходя из необходимости обеспечения отклонений рулевого рычага в обе стороны от исходного положения на максимальный 90° Атах угол т где т-масштабный коэффициент, определяемый конструктивными параметрами рулевого устройства. Отклонение рулевого рычага на угол р т а х соответствует положению колёс для разворота вокруг центра платформы транспортного средства. Паз 37 расположен перпендикулярно пазу 36 и предназначен для обеспечения режима плоскопараллельного маневрирования. Длину паза 37 выбирают исходя из необходимости обеспечения отклонения рулевого рычага в обе стороны от исходного положения на угол # п т а х , соответетвующий повороту всех колёс на заданные максимальные одинаковые углы для движения транспортного средства в режиме плоскопараллельного маневрирования. Криволинейные пазы 31...34 предназначены для согласования углов поворота колее в режиме криволинейного маневрирования и их форма определяется зависимостью (I) между углом р отклонения рулевого рычага и углом а поворота соответствующего задатчика. На фиг.5 показаны формы пазов 31...34 и направление поворота соответствующих задатчиков для варианта, когда pmax и центр разворота транспортного средства в режиме криволинейного маневрирования совпадает с точной пересечения продольной и поперечили осей симметрии транспортного средства, а за положительное направление поворота относительно своего исходного положения принят поворот колёс против часовой стрелки. При этом максимальное значение углов * 2 r i m a x " - < a r 4 m a x n O B ° P O T a ЗЭДЭТЧИКОВ СООТВвТСТВуЮТ максимальным отклонениям рулевого рычага. 27832 На фиг.6...11 показаны характерные положения рулевого рычага относительно пазов 36,37 и соответствующие этому положения управляемых колёс 1...4, а также знаки координат центров поворота колёс относительно продольной и поперечной осей симметрии транспортного средства, принятые при расчёте формы пазов 31...34. Управление поворотом колёс транспортного средства производят путём перемещения рулевого-рычага 12 в пазах 36 или 37 переключателя режимов криволинейного и плоскопараллельного маневрирования. При перемещении рычага 12 в пазу 36 реализуется режим криволинейного маневрирования, так как рычаг 12 одновременно перемещается и в пазах 31...34. Взаимодействуя при этом с задатчиками 15... 18 рычаг 12 поворачивает их на разные углы (Х1...СС4, соответствующие требуемым углам поворота колёс. Через пары шестерён 19 и 29, 21 и 22, 23 и 24, 25 и 26, валы 27...30 и конические редукторы 6...9 обеспечивается необходимое передаточное отношение и поворот соответствующих колёс 1...4 на требуемых углы ах...(ХА. . В данном описании приведен один из возможных видов связи между рулевым устройством и управляемыми колёсами (непосредственная кинематическая связь). В принципе возможно использование отдельных приводов поворота колёс, связанных, например, электрически с задатчиками рулевого устройства, что не меняет сути предложения. При перемещении рычага 12 в пазу 37 реализуется режим плоскопараллельного маневрирования, так как при этом исключается перемещение рычага 12 в пазах. Происходит непосредственное воздействие рычага 12 на все задатчики 15...18, обеспечивающее их поворот на одинаковые углы (ССХ — сс2 = ОСЪ = ССА ) и, соответственно, плоскопараллельный поворот всех колёс 1...4 на требуемый угол в заданном направлении. Возможности транспортного средства в режиме криволинейного маневрирования показаны на фиг.6...8, а в режиме плоскопараллельного маневрирования - на фиг:9...11. В соответствии с приведенным вариантом выполнения пазов 31...34, диапазон маневрирования при перемещении рычага 12 по пазу 36 может изменяться от прямолинейного движения (когда рычаг в исходном положении) до разворота вокруг своего центра против часовой стрелки (когда рычаг в в крайнем левом положении) или по часовой стрелке (когда рычаг в крайнем правом положении). При перемещении рычага 12 по пазу 37 диапазон плоско-параллельного маневрирования может изменяться от исходного прямолинейного движения (в направлении, совпадающем с продольной осью транспортного средства) до движения в поперечном направлении под углами, превышающими 90е к продольной оси, влево (когда рычаг в верхнем положении) и вправо (когда рычаг в нижнем положении). Переход с одного режима маневрирования на другой может производиться как во время стоянки, так и во время движения транспортного средства. Для уменьшения износа колёс при повороте они могут быть выполнены с возможностью обкатывания вокруг своих вертикальных осей поворота. Таким образом, предлагаемое транспортное средство по сравнению с прототипом обладает значительно большим диапазоном маневрирования как в режиме с изменением кривизны радиуса разворота, так и в режиме движения "крабом" (плоскопараллельное маневрирование) при одновременном уменьшении износа покрытия колес. Система управления поворотом колёс такого транспортного средства может быть широко использована в транспортной технике различного функционального назначения, работающего в стеснённых для маневрирования условиях, например, в колёсных тракторах, городских автомобилях и автобусах, внутрицеховом промышленном транспорте и т.д. Применение предлагаемого транспортного средства, по сравнению с соотвествующими аналогами, даст следующие преимущества: - улучшение маневренности внутрицехового транспорта обеспечит сокращение времени и расхода энергии на выполнение транспортных операций, а также дает возможность сократить производственные площади, потребные для транспортных проездов; - возможность плоскопараллельного маневрирования облегчит парковку транспортных средств на городских стоянках, а также облегчит объезд препятствий и переход с одной полосы на другую при движении по трассам с интенсивной загрузкой. Кроме того, сокращение промежуточных маневровых операций обеспечит экономию топлива и уменьшение загазованности атмосферного воздуха, что будет способствовать улучшению экологии окружающей среды. 27BZ2 Фиг.1 ZE9/2 /A///////Y///////////J г/ І/ zzm ог гг 27832 Фиг.4 SI Z2QLZ 27832 Фиг.6 Фиг. 7 Фиг.8 л ч . I Фиг.9 ш. Фиг. 10 10 Фиг.11 27832 ДП "Український інститут промислової власності" (Укрпатент) Бульв. Лесі Українки, 26, Київ, 01133, Україна (044) 254-42-30, 295-61-97 Підписано до друку j £ £ l V . 2001 p. Формат 60x84 1/8. Обсяг ^ 0% обл.-вид.арк. Тираж 50 прим. Зам. с£ £ УкрІНТЕІ Вул. Горького, 180, Київ, 03680 МСП, Україна (044) 268-25-22 11
ДивитисяДодаткова інформація
Автори англійськоюHrenader Mykhailo Yukhymovych
Автори російськоюГренадер Михаил Ефимович
МПК / Мітки
МПК: B62D 7/14
Мітки: усіма, керованими, транспортний, засіб, колесами
Код посилання
<a href="https://ua.patents.su/12-27832-transportnijj-zasib-z-usima-kerovanimi-kolesami.html" target="_blank" rel="follow" title="База патентів України">Транспортний засіб з усіма керованими колесами</a>
Рульове управління транспортного засобу з усіма керованими колесами
Номер патенту: 9938
Опубліковано: 30.09.1996
Автор: Прогляда Леонід Петрович
Мітки: усіма, керованими, транспортного, колесами, рульове, управління, засобу
Формула / Реферат:
(57) Рулевое управление транспортного средства со всеми управляемыми колесами, содержащее рулевой механизм, соединенный гидравлически с полостями исполнительных гидроцилидров поворота передних колес и через устройство переключения схемы поворота задних колес с полостями исполнительных гидроцилиндров поворота задних колес, отличающееся тем, что оно снабжено главным и дополнительным гидроцилиндрами, подвижные части которых кинематически...
Підлоговий чотирьохколісний транспортний засіб

Номер патенту: 2507
Опубліковано: 26.12.1994
Автори: Кохан Іван Михайлович, Самонін Анатолій Васильович, Субботін Юрій Петрович, Шнейдер Володимир Львович, Гренадер Михайло Юхимович, Володарський Віктор Тимофійович
МПК: B62D 7/14
Мітки: транспортний, чотирьохколісний, засіб, підлоговий
Формула / Реферат:
1. Напольное четырехколесное транспортное средство, содержащее все управляемые колеса, кинематически попарно связанные между собой, по крайней мере, два из которых ведущие, блок управления с переключателем направления движения, связанный через исполнительный механизм с каждой парой управляемых колес, и элементы согласования поворота управляемых колес разных пар, отличающийся тем, что между собой попарно связаны управляемые колеса одного...
Автоматичний підлоговий транспортний засіб

Номер патенту: 176
Опубліковано: 30.04.1993
Автори: Володарський Віктор Тимофійович, Орлов Борис Арсентьович, Гренадер Михайло Юхимович, Бобиляк Микола Васильович
МПК: B60K 31/00
Мітки: засіб, підлоговий, автоматичний, транспортний
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я 1. Автоматическое напольное транспортное средство, содержащее ведущие и ведомые колеса, одни из которых, расположенные по одному из бортов, имеют общий привод поворота, один из блоков для считывания сигналов путевых меток, подключенный выходом к одному из входов дешифратора, датчики углов поворота колес и формирователь управляющих сигналов приводами ведущих колес, о т л и ч а ю щ е е с я тем, что,...
Транспортний засіб

Номер патенту: 24736
Опубліковано: 25.12.1998
Автор: Булдескул Леонід Станіславович
Мітки: засіб, транспортний
Формула / Реферат:
Формула изобретенияТранспортное средство, содержащее раму, по крайнем мере две тележки с движителями, установленные на раме посредством опорно-поворотных устройств, вертикальные оси вращения которых расположены в плоскостях симметрии движителей и размещены на расстоянии одна от другой, превышающем половину длины тележки, приводы вращения движителей, поворота тележек и тормозов, отличающееся тем, что, с целью повышения маневренности,...
Транспортний засіб типу самокату
Номер патенту: 10390
Опубліковано: 25.12.1996
Автор: Ткаченко Анатолій Володимирович
МПК: B62M 1/00
Мітки: типу, самокату, засіб, транспортний
Формула / Реферат:
Транспортное средство типа самоката, содержащее раму, опорную площадку, стойку руля, установленную в передней части рамы, переднее управляемое колесо, связанное со стойкой руля, ведущее колесо, установленное на оси в задней части рамы, приводное устройство, включающее связанный с рамой приводной двуплечий рычаг, установленный с возможностью колебательного движения относительно оси, ведущую звездочку, механизм преобразования колебательного...
Попередній патент: Пристрій для попереднього нагрівання сухого матеріалу (варіанти)
Наступний патент: Спосіб обмеження допливу пластових вод у свердловину
Випадковий патент: Спосіб отримання дифузійного борованого покриття на робочих поверхнях деталей машин