Конвеєрні ваги
Номер патенту: 90222
Опубліковано: 12.04.2010
Автори: Чаплюк Андрій Євгенович, Мялковський Валентин Йосипович, Брюм Віктор Зиновійович, Чаплюк Євгеній Михайлович, Грядущий Борис Абрамович, Булигін Віктор Іванович, Чехлатий Микола Олександрович
Формула / Реферат
1. Конвеєрні ваги, що складаються з роликів, які розташовані на роликоопорах, що встановлені на вантажній рамі, датчика шляху, який встановлений під конвеєрною стрічкою, датчика ваги, що встановлений на раму опорну та через гаситель ударів стикається вимірювальною частиною з вантажною рамою, перетворювача, аналоговий вхід якого з'єднаний з відповідним виходом датчика ваги, першого мікроконтролера, числоімпульсний вхід якого з'єднаний з відповідним виходом перетворювача, вихід "Читання даних" з'єднаний з відповідним входом перетворювача, вхід "Запис даних" - з відповідним виходом перетворювача, а перший цифровий вхід - з відповідним виходом датчика шляху, першого індикатора, клавіатури, які відрізняються тим, що додатково містить гаситель ударів, що розташований під конвеєрною стрічкою та встановлений на датчику ваги, два мікроконтролери, два приймачі-передавачі, інформаційний вхід першого приймача-передавача з'єднаний з відповідним виходом першого мікроконтролера, а інформаційний вихід останнього - з відповідним входом першого приймача-передавача, вхід-вихід першого приймача-передавача з'єднаний з відповідним входом-виходом другого приймача-передавача, інформаційний вихід якого з'єднаний з відповідним входом другого мікроконтролера, а інформаційний вхід - з відповідним виходом другого мікроконтролера, шина вводу-виводу даних останнього з'єднана з відповідною шиною вводу-виводу даних клавіатури, шина виводу даних другого мікроконтролера з'єднана з відповідною шиною введення даних першого індикатора, діод і конденсатор, один кінець конденсатора з'єднаний з мінусом джерела електроживлення, а другий - з катодом діода і входом електроживлення другого мікроконтролера, граничний пристрій, вхід якого з'єднаний із плюсом джерела електроживлення і анодом діода, перший вихід - з катодом діода, а другий - з першим цифровим входом другого мікроконтролера, два резистори і транзистор, база якого через перший резистор з'єднана з аналоговим виходом другого мікроконтролера, емітер транзистора з'єднаний через другий резистор з мінусом джерела електроживлення та з аналоговим входом другого мікроконтролера, а колектор - із входом стабілізатора струму, кнопка, один кінець якої з'єднаний з першим цифровим входом третього мікроконтролера, а другий - с плюсом джерела електроживлення, другий індикатор, шина вводу даних якого з'єднана з відповідною шиною виводу даних третього мікроконтролера, другий цифровий вхід останнього з'єднаний з відповідним виходом першого мікроконтролера, третій цифровий вхід останнього з'єднаний із другим виходом датчика шляху.
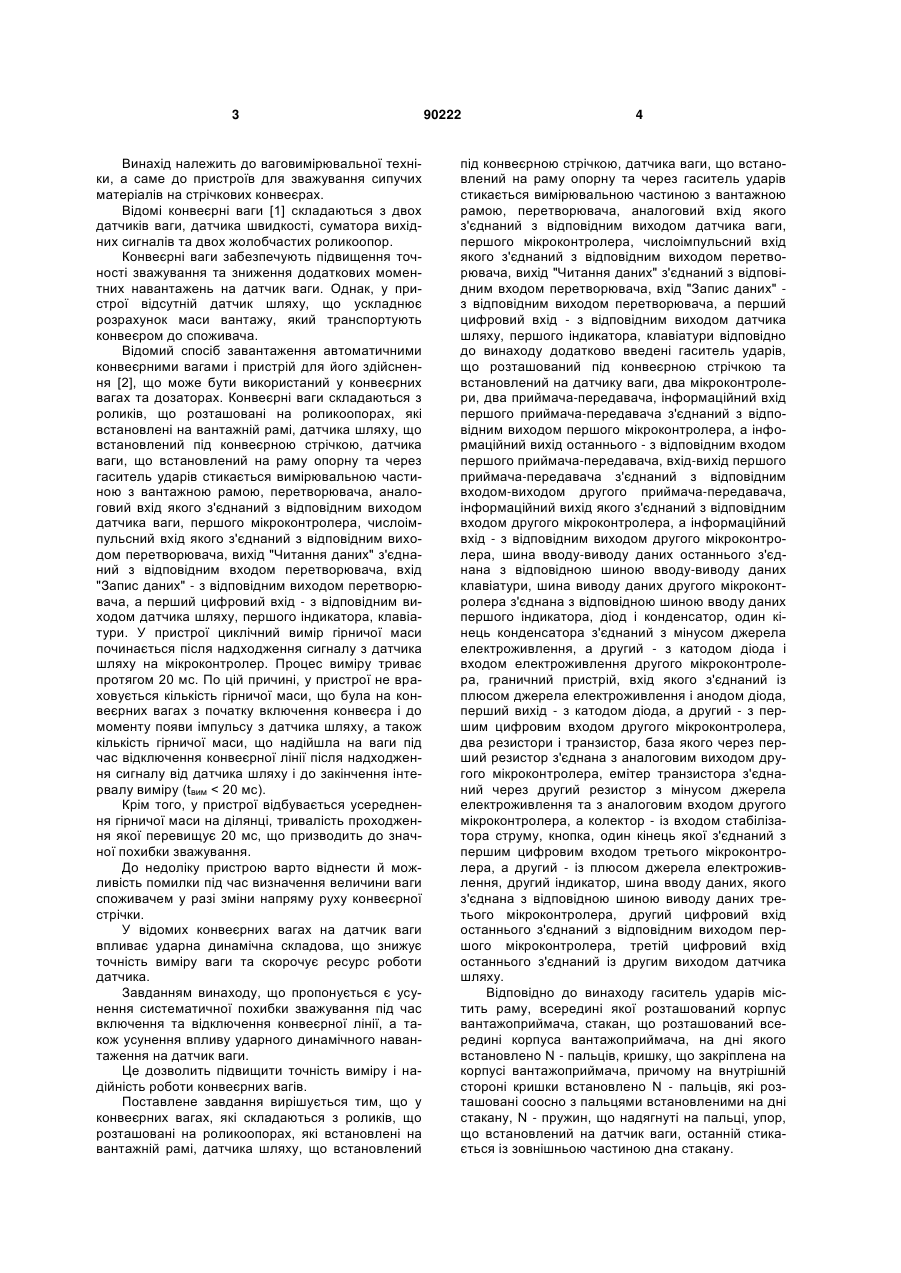
2. Конвеєрні ваги за п. 1, які відрізняються тим, що гаситель ударів містить раму, всередині якої розташований корпус вантажоприймача, стакан, що розташований всередині корпуса вантажоприймача, на дні якого встановлено N-пальців, кришку, що закріплена на корпусі вантажоприймача, причому на внутрішній стороні кришки встановлено N-пальців, які розташовані співвісно з пальцями, встановленими на дні стакана, N-пружин, що надягнуті на пальці, упор, що встановлений на датчику ваги, останній стикається з зовнішньою частиною дна стакана.
Текст
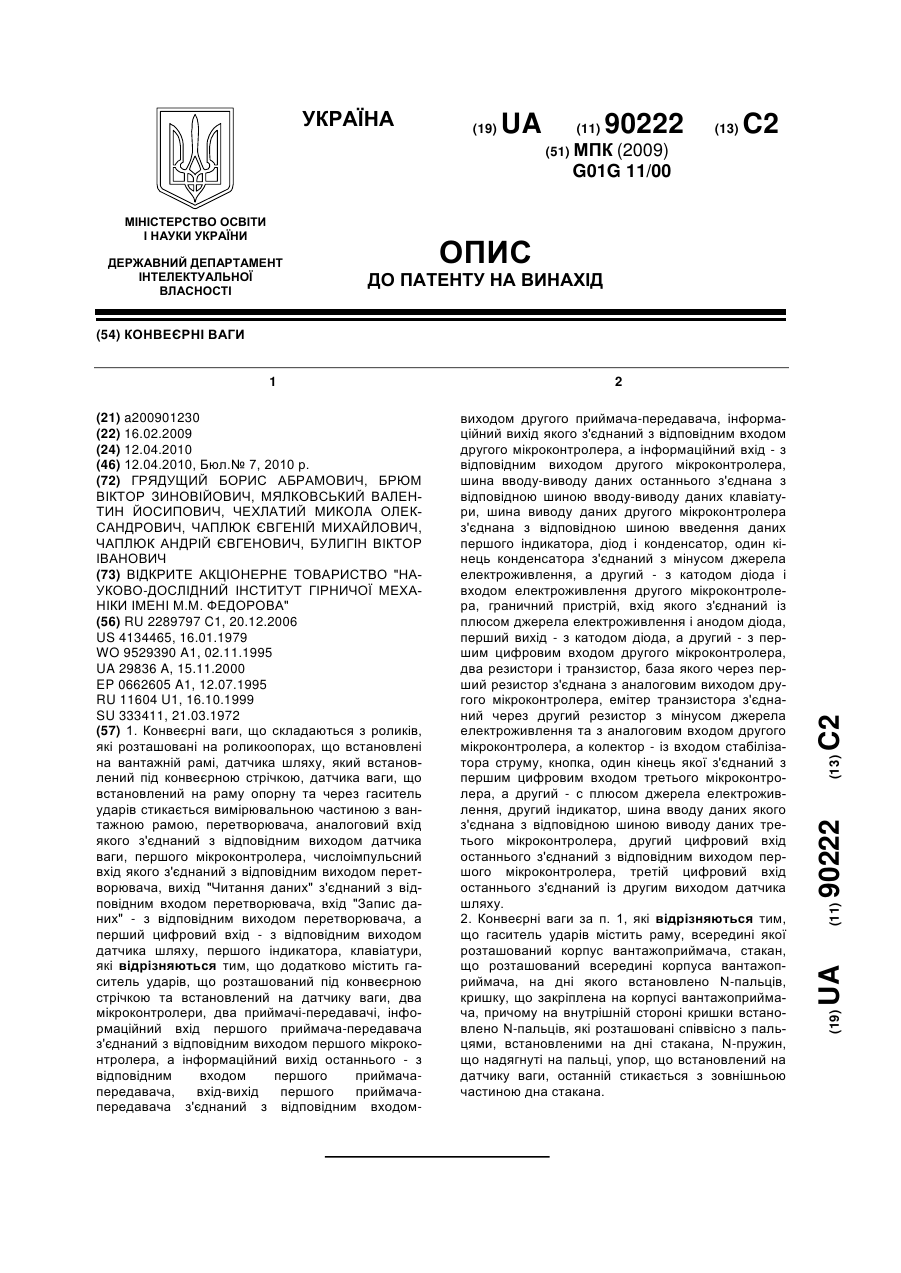
1. Конвеєрні ваги, що складаються з роликів, які розташовані на роликоопорах, що встановлені на вантажній рамі, датчика шляху, який встановлений під конвеєрною стрічкою, датчика ваги, що встановлений на раму опорну та через гаситель ударів стикається вимірювальною частиною з вантажною рамою, перетворювача, аналоговий вхід якого з'єднаний з відповідним виходом датчика ваги, першого мікроконтролера, числоімпульсний вхід якого з'єднаний з відповідним виходом перетворювача, вихід "Читання даних" з'єднаний з відповідним входом перетворювача, вхід "Запис даних" - з відповідним виходом перетворювача, а перший цифровий вхід - з відповідним виходом датчика шляху, першого індикатора, клавіатури, які відрізняються тим, що додатково містить гаситель ударів, що розташований під конвеєрною стрічкою та встановлений на датчику ваги, два мікроконтролери, два приймачі-передавачі, інформаційний вхід першого приймача-передавача з'єднаний з відповідним виходом першого мікроконтролера, а інформаційний вихід останнього - з відповідним входом першого приймачапередавача, вхід-вихід першого приймачапередавача з'єднаний з відповідним входом 2 (19) 1 3 Винахід належить до ваговимірювальної техніки, а саме до пристроїв для зважування сипучих матеріалів на стрічкових конвеєрах. Відомі конвеєрні ваги [1] складаються з двох датчиків ваги, датчика швидкості, суматора вихідних сигналів та двох жолобчастих роликоопор. Конвеєрні ваги забезпечують підвищення точності зважування та зниження додаткових моментних навантажень на датчик ваги. Однак, у пристрої відсутній датчик шляху, що ускладнює розрахунок маси вантажу, який транспортують конвеєром до споживача. Відомий спосіб завантаження автоматичними конвеєрними вагами і пристрій для його здійснення [2], що може бути використаний у конвеєрних вагах та дозаторах. Конвеєрні ваги складаються з роликів, що розташовані на роликоопорах, які встановлені на вантажній рамі, датчика шляху, що встановлений під конвеєрною стрічкою, датчика ваги, що встановлений на раму опорну та через гаситель ударів стикається вимірювальною частиною з вантажною рамою, перетворювача, аналоговий вхід якого з'єднаний з відповідним виходом датчика ваги, першого мікроконтролера, числоімпульсний вхід якого з'єднаний з відповідним виходом перетворювача, вихід "Читання даних" з'єднаний з відповідним входом перетворювача, вхід "Запис даних" - з відповідним виходом перетворювача, а перший цифровий вхід - з відповідним виходом датчика шляху, першого індикатора, клавіатури. У пристрої циклічний вимір гірничої маси починається після надходження сигналу з датчика шляху на мікроконтролер. Процес виміру триває протягом 20 мс. По цій причині, у пристрої не враховується кількість гірничої маси, що була на конвеєрних вагах з початку включення конвеєра і до моменту появи імпульсу з датчика шляху, а також кількість гірничої маси, що надійшла на ваги під час відключення конвеєрної лінії після надходження сигналу від датчика шляху і до закінчення інтервалу виміру (tвим < 20 мс). Крім того, у пристрої відбувається усереднення гірничої маси на ділянці, тривалість проходження якої перевищує 20 мс, що призводить до значної похибки зважування. До недоліку пристрою варто віднести й можливість помилки під час визначення величини ваги споживачем у разі зміни напряму руху конвеєрної стрічки. У відомих конвеєрних вагах на датчик ваги впливає ударна динамічна складова, що знижує точність виміру ваги та скорочує ресурс роботи датчика. Завданням винаходу, що пропонується є усунення систематичної похибки зважування під час включення та відключення конвеєрної лінії, а також усунення впливу ударного динамічного навантаження на датчик ваги. Це дозволить підвищити точність виміру і надійність роботи конвеєрних вагів. Поставлене завдання вирішується тим, що у конвеєрних вагах, які складаються з роликів, що розташовані на роликоопорах, які встановлені на вантажній рамі, датчика шляху, що встановлений 90222 4 під конвеєрною стрічкою, датчика ваги, що встановлений на раму опорну та через гаситель ударів стикається вимірювальною частиною з вантажною рамою, перетворювача, аналоговий вхід якого з'єднаний з відповідним виходом датчика ваги, першого мікроконтролера, числоімпульсний вхід якого з'єднаний з відповідним виходом перетворювача, вихід "Читання даних" з'єднаний з відповідним входом перетворювача, вхід "Запис даних" з відповідним виходом перетворювача, а перший цифровий вхід - з відповідним виходом датчика шляху, першого індикатора, клавіатури відповідно до винаходу додатково введені гаситель ударів, що розташований під конвеєрною стрічкою та встановлений на датчику ваги, два мікроконтролери, два приймача-передавача, інформаційний вхід першого приймача-передавача з'єднаний з відповідним виходом першого мікроконтролера, а інформаційний вихід останнього - з відповідним входом першого приймача-передавача, вхід-вихід першого приймача-передавача з'єднаний з відповідним входом-виходом другого приймача-передавача, інформаційний вихід якого з'єднаний з відповідним входом другого мікроконтролера, а інформаційний вхід - з відповідним виходом другого мікроконтролера, шина вводу-виводу даних останнього з'єднана з відповідною шиною вводу-виводу даних клавіатури, шина виводу даних другого мікроконтролера з'єднана з відповідною шиною вводу даних першого індикатора, діод і конденсатор, один кінець конденсатора з'єднаний з мінусом джерела електроживлення, а другий - з катодом діода і входом електроживлення другого мікроконтролера, граничний пристрій, вхід якого з'єднаний із плюсом джерела електроживлення і анодом діода, перший вихід - з катодом діода, а другий - з першим цифровим входом другого мікроконтролера, два резистори і транзистор, база якого через перший резистор з'єднана з аналоговим виходом другого мікроконтролера, емітер транзистора з'єднаний через другий резистор з мінусом джерела електроживлення та з аналоговим входом другого мікроконтролера, а колектор - із входом стабілізатора струму, кнопка, один кінець якої з'єднаний з першим цифровим входом третього мікроконтролера, а другий - із плюсом джерела електроживлення, другий індикатор, шина вводу даних, якого з'єднана з відповідною шиною виводу даних третього мікроконтролера, другий цифровий вхід останнього з'єднаний з відповідним виходом першого мікроконтролера, третій цифровий вхід останнього з'єднаний із другим виходом датчика шляху. Відповідно до винаходу гаситель ударів містить раму, всередині якої розташований корпус вантажоприймача, стакан, що розташований всередині корпуса вантажоприймача, на дні якого встановлено N - пальців, кришку, що закріплена на корпусі вантажоприймача, причому на внутрішній стороні кришки встановлено N - пальців, які розташовані соосно з пальцями встановленими на дні стакану, N - пружин, що надягнуті на пальці, упор, що встановлений на датчик ваги, останній стикається із зовнішньою частиною дна стакану. 5 Введення у конвеєрні ваги граничного пристрою дозволяє виключити помилку виміру, яка обумовлена несинхронністю включення конвеєрної лінії та появою сигналу від датчика шляху. Додання у датчик шляху функції визначення напрямку руху гірничої маси дозволяє вилучити похибку при визначенні величини ваги споживачем у разі зміни напрямку руху конвеєрної стрічки. Введенням гасителя ударів виключається ударна динамічна складова і підвищується точність виміру ваги. На Фіг.1 зображена блок-схема конвеєрних вагів. Конвеєрні ваги складаються з мікроконтролерів 1, 2, 3, індикаторів 4 і 5, приймачів-передавачів 6 і 7, клавіатури 8, датчика шляху 9, датчика ваги 10, перетворювача 11, граничного пристрою 12, гасителя ударів 13, діода 14, конденсатора 15, резисторів 16 і 17, транзистора 18, стабілізатора струму 19, конвеєрної стрічки 20, роликів 21 та 22, роликоопор 23 і 24, кнопки 25, вантажної рами 26, рами опорної 27, упора 28. На Фіг.2 зображений гаситель ударів. Гаситель ударів складається з рами 29, корпуса вантажоприймача 30, стакана 31, вимірювальних пружин 32, пальців 33 і 34, кришки 35. Конвеєрні ваги працюють у такий спосіб. Під час включення напруги живлення Uж граничний пристрій 12 формує сигнал запуску початку виміру. Аналоговий сигнал з виходу датчика ваги 10 надходить на перетворювач 11, що перетворює інформацію у числоімпульсний код. Після надходження з перетворювача 11 сигналу готовності даних мікроконтролер 1 здійснює зчитування інформації. Потім через приймач-передавач 6 інформація надходить на приймач-передавач 7, який забезпечує зв'язок з мікроконтролером 2. Останній здійснює перетворення даних у поточне значення ваги на конвеєрній стрічці 20. Аналогова величина поточного значення ваги надходить через транзистор 18 і стабілізатор струму 19 у схему керування конвеєром. Сигнал з виходу опору 17 надходить на аналоговий вхід мікроконтролера 2 і служить для контролю величини відхилення вихідного сигналу у разі зміни навантаження на стабілізатор струму 19. Під час надходження сигналу напрямку та переміщення з датчика шляху 9 мікроконтролер 1 закінчує процес зважування гірничої маси на обмірюваній ділянці конвеєра 20, формує сигнал запису даних і запуску початку наступного циклу виміру. При цьому інформація з датчика ваги 10 через перетворювач 11 надходить на мікроконтролер 1. Останній через приймачі-передавачі 6 й 7 здійснює передачу поточного значення ваги, напрямок руху конвеєрної стрічки 20, величини зваженої гірничої маси на обмірюваній попередній ділянці на мікроконтролер 2. 90222 6 Крім того, величина зваженої гірничої маси з виходу мікроконтролера 2 надходить на мікроконтролер 3. Інформація про кількість зваженої гірничої маси та маси, що проходить через вимірювальну ділянку вагів виводиться на індикатори 4 і 5. Довжина вимірювальної ділянки вагів визначається їхньою конструкцією й контролюється за допомогою датчика шляху 9. У мікроконтролері 2 передбачений вихід "Команда керування" для керування конвеєром і вихід "Видобуток" для дистанційної передачі сигналів про кількість видобутого вугілля. Під час надходження чергового сигналу з датчика шляху 9 закінчується процес зважування гірничої маси, а далі цикл повторюється. Клавіатура 8 призначена для встановлення даних про довжину ділянки зважування, ваги вимірювальної ділянки при відсутності гірничої маси на конвеєрній стрічці 20. Під час надходження сигналу з датчика шляху 9 про зміну напряму руху конвеєрної стрічки 20 величина зваженої гірничої маси буде відніматися. На індикаторах 4 і 5 буде зменшуватися кількість гірничої маси. Таке рішення дозволить виключити помилки зважування у споживача зі зміною напряму руху вантажу. Кнопка 25 призначена для формування команд про надання даних на індикатор 4. Тиск маси вантажу та конвеєрної стрічки 20 передається через вантажну раму 26 і корпус вантажоприймача 30 на вимірювальні пружини 32. Кількість пружин обирається з умови зниження динаміки удару кусковатого вантажу при збереженні необхідної точності виміру ваги. У випадку якщо динамічне зусилля від удару окремих часток вантажу перевищує силу пружності вимірювальних пружин 32, то останні стискуються до зіткнення пальців 33 і 34. При цьому корпус вантажоприймача 30, долаючи захисний зазор лягає на упор 28. Після проходження ударного впливу на гаситель удару 13, корпус вантажоприймача 30, рама 29 і вимірювальні пружини 32 повертаються на начальне положення. Пропоноване технічне рішення усуває систематичну похибку зважування при включенні й відключенні конвеєрної лінії, а також забезпечує усунення впливу ударного динамічного навантаження на датчик ваги. В інституті виготовлений дослідний зразок конвеєрних вагів, що пройшов випробування на шахті. Джерела інформації: 1. RU № 2289797, Конвейерные весы МПК G01G11/00, Опубл. 20.12.2006г.,Бюл. № 33. 2. Украина Деклараційний патент № 29836А, Спосіб завантаження автоматичними конвеєрними вагами і пристрій для його здійснення, МПК G01G11/14, Опубл. 15.11.2000г., Бюл. № 6-II. 7 Комп’ютерна верстка Л. Литвиненко 90222 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюConveyor balance
Автори англійськоюHriaduschyi Borys Abramovych, Brium Viktor Zynoviiovych, Mialkovskyi Valentyn Yosypovych, Chekhlatyi Mykola Oleksandrovych, Chapliuk Yevhenii Mykhailovych, Chapliuk Andrii Yevheniiovych, Bulyhin Viktor Ivanovych
Назва патенту російськоюКонвейерные весы
Автори російськоюГрядущий Борис Абрамович, Брюм Виктор Зиновьевич, Мялковский Валентин Иосифович, Чехлатый Николай Александрович, Чаплюк Евгений Михайлович, Чаплюк Андрей Евгеньевич, Булыгин Виктор Иванович
МПК / Мітки
МПК: G01G 11/00
Код посилання
<a href="https://ua.patents.su/4-90222-konveehrni-vagi.html" target="_blank" rel="follow" title="База патентів України">Конвеєрні ваги</a>
Конвеєрні ваги
Номер патенту: 26945
Опубліковано: 10.10.2007
Автори: Носіков Віталій Петрович, Павлов Володимир Евгенійович, Поповкін Юрій Матвійович
МПК: G01G 13/00
Формула / Реферат:
Конвеєрні ваги, які містять датчик ваги, аналого-цифровий перетворювач, датчик швидкості, мікропроцесор, які відрізняються тим, що вагова платформа виконана з листового металу плоскої або жолобчастої форми, з двох сторін по ходу стрічки обмеженої напрямними роликами.
Конвеєрні ваги
Номер патенту: 9530
Опубліковано: 17.10.2005
Автор: Тимофєєва Юлія Володимирівна
МПК: G01G 11/00
Формула / Реферат:
1. Конвеєрні ваги, що містять нерухому опору, встановлену на рамі конвеєра, профіль зважування, прикріплений до нерухомої опори плоскими пружинами, і датчик силовимірювальний тензорезисторний, закріплений одним кінцем на нерухомій опорі, які відрізняються тим, що профіль зважування підвішений на другому кінці датчика за допомогою пружного кардана, що складається з двох пружних пластин, які з'єднані між собою взаємно перпендикулярно.2....
Конвеєрні ваги
Номер патенту: 13940
Опубліковано: 17.04.2006
Автори: Калінін Олександр Олександрович, Калінін Олександр Іванович
МПК: G01G 11/00
Формула / Реферат:
Конвеєрні ваги, що містять вагову ділянку з обмежуючими її роликоопорами стрічкового транспортера, розташованими під вантажною гілкою транспортерної стрічки, розміщеної на ваговій ділянці вантажоприймальну платформу з роликоопорами, що контактують із транспортерною стрічкою і яка спирається через вузли силовведення на силовимірювальні тензодатчики, датчик швидкості транспортерної стрічки, які відрізняються тим, що вантажоприймальна платформа...
Конвеєрні ваги
Номер патенту: 41737
Опубліковано: 10.06.2009
Автор: Калінін Олександр Іванович
МПК: G01G 11/00
Формула / Реферат:
Конвеєрні ваги, що містять вагову ділянку з обмежуючими її роликоопорами стрічкового транспортера, розташованими під вантажною гілкою транспортерної стрічки, розміщену на ваговій ділянці вантажоприймальну платформу з роликоопорами, що контактують із транспортерною стрічкою, і яка спирається через вузли силовведення на силовимірювальні тензодатчики, датчик швидкості транспортерної стрічки, які відрізняються тим, що вантажоприймальна платформа...
Конвеєрні ваги
Номер патенту: 28440
Опубліковано: 16.10.2000
Автори: Нікітінський Михайло Павлович, Цимбалюк Анатолій Григорович
МПК: G01G 11/00
Формула / Реферат:
Конвейерные весы, встраиваемые в конвейер, содержащие устройство преобразования измеряемой нагрузки, снабженное датчиками массы и скорости, подключенными к измерительному блоку, отличающиеся тем, что устройство преобразования измеряемой нагрузки выполнено в виде установленной на силоизмерительные датчики грузоприемной платформы, расположенной между опорными платформами, жестко закрепленными к раме конвейера, при этом на грузоприемной и...
Попередній патент: Вихрова труба
Наступний патент: Безконтактний спосіб вимірювання швидкості поверхневих акустичних хвиль
Випадковий патент: Спосіб оптимального розходження судна з небезпечною ціллю в обмежених водах маневром зміни швидкості судна