Спосіб визначення переміщень поверхні об’єкта
Номер патенту: 91018
Опубліковано: 25.06.2010
Автори: Рожковський Володимир Фаустович, Бузьська Наталія Олександрівна, Сохач Юрій Васильович
Формула / Реферат
Спосіб визначення переміщень поверхні об'єкта за голографічним інтерференційним портретом, отриманим в процесі навантаження об'єкта, який полягає в тому, що за допомогою відеопристрою голографічний інтерференційний портрет заводять до комп'ютера, виходячи із розподілу інтенсивності почорніння поверхні об'єкта, зображеного на голографічному інтерференційному портреті, програмним способом визначають фазу світлової хвилі і, використовуючи формули зв'язку фази з величиною переміщень, визначають переміщення поверхні об'єкта, який відрізняється тим, що голографічний інтерференційний портрет програмним способом розбивають на скінченні елементи, задають зв'язок між значеннями інтенсивності почорніння у вузлових точках елементів у вигляді полінома з невідомими коефіцієнтами, які визначаються шляхом мінімізації функціонала відхилень інтенсивності вихідного голографічного інтерференційного портрета і отриманого розрахунковим способом з використанням значень фаз, які обчислюють за допомогою вибраних поліномів.
Текст
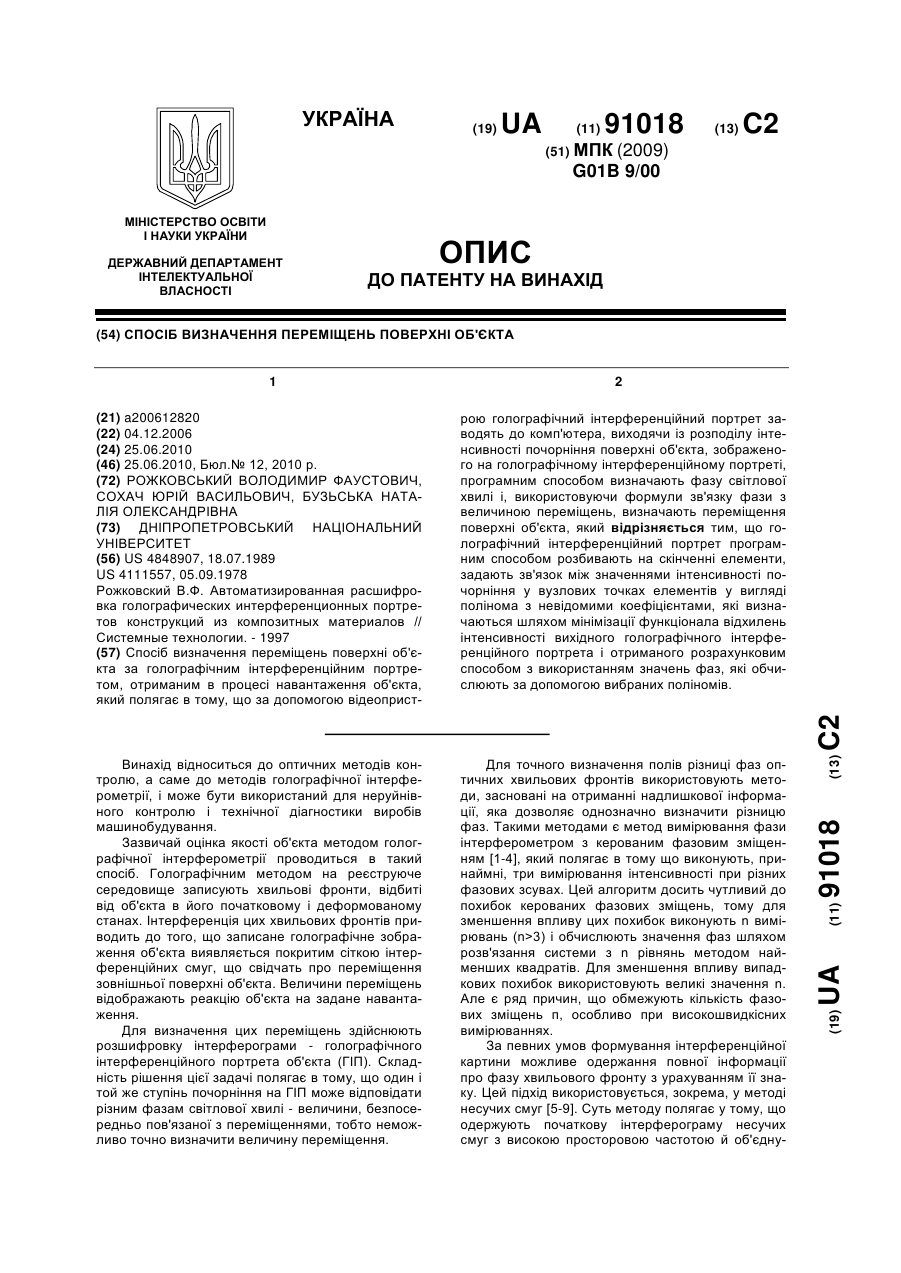
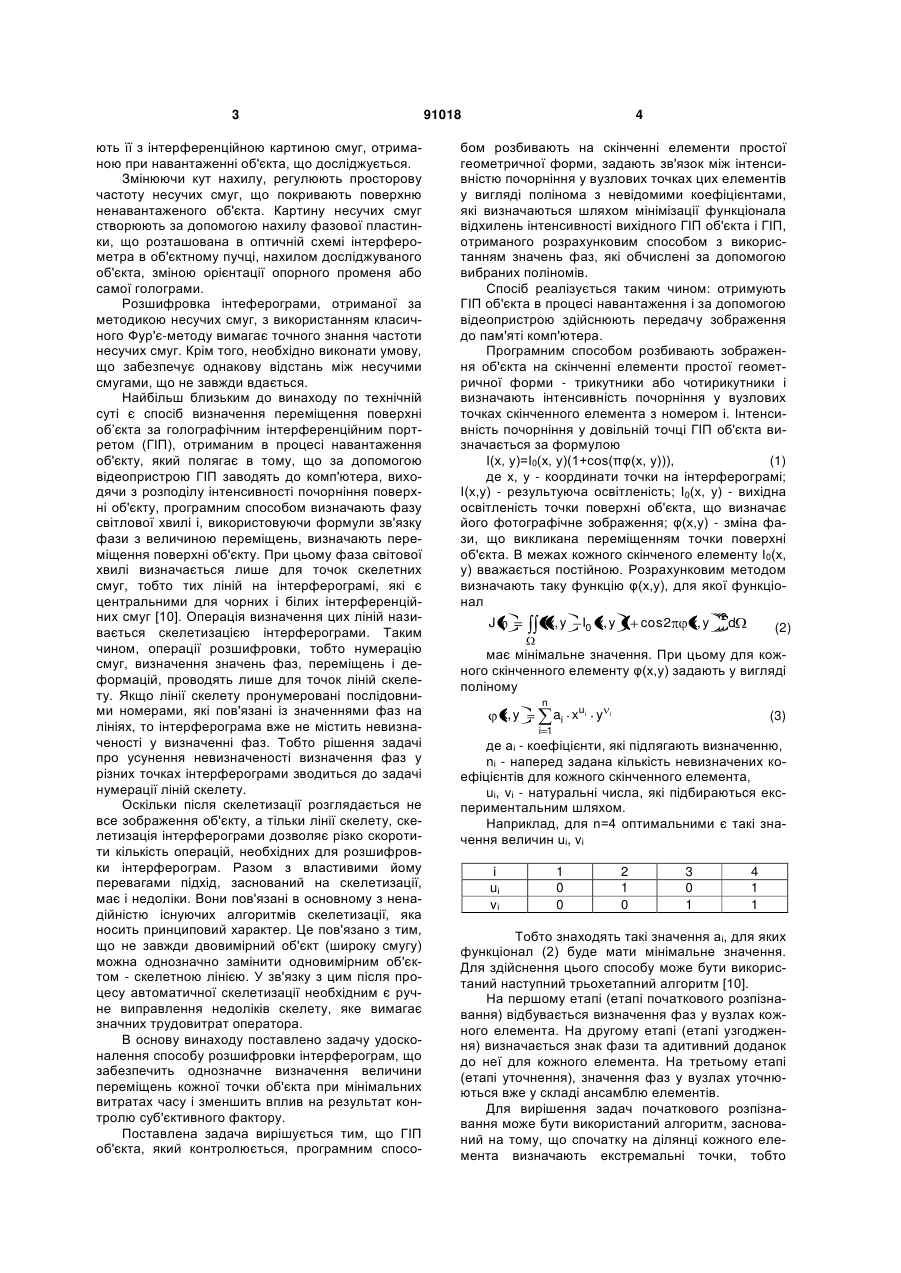
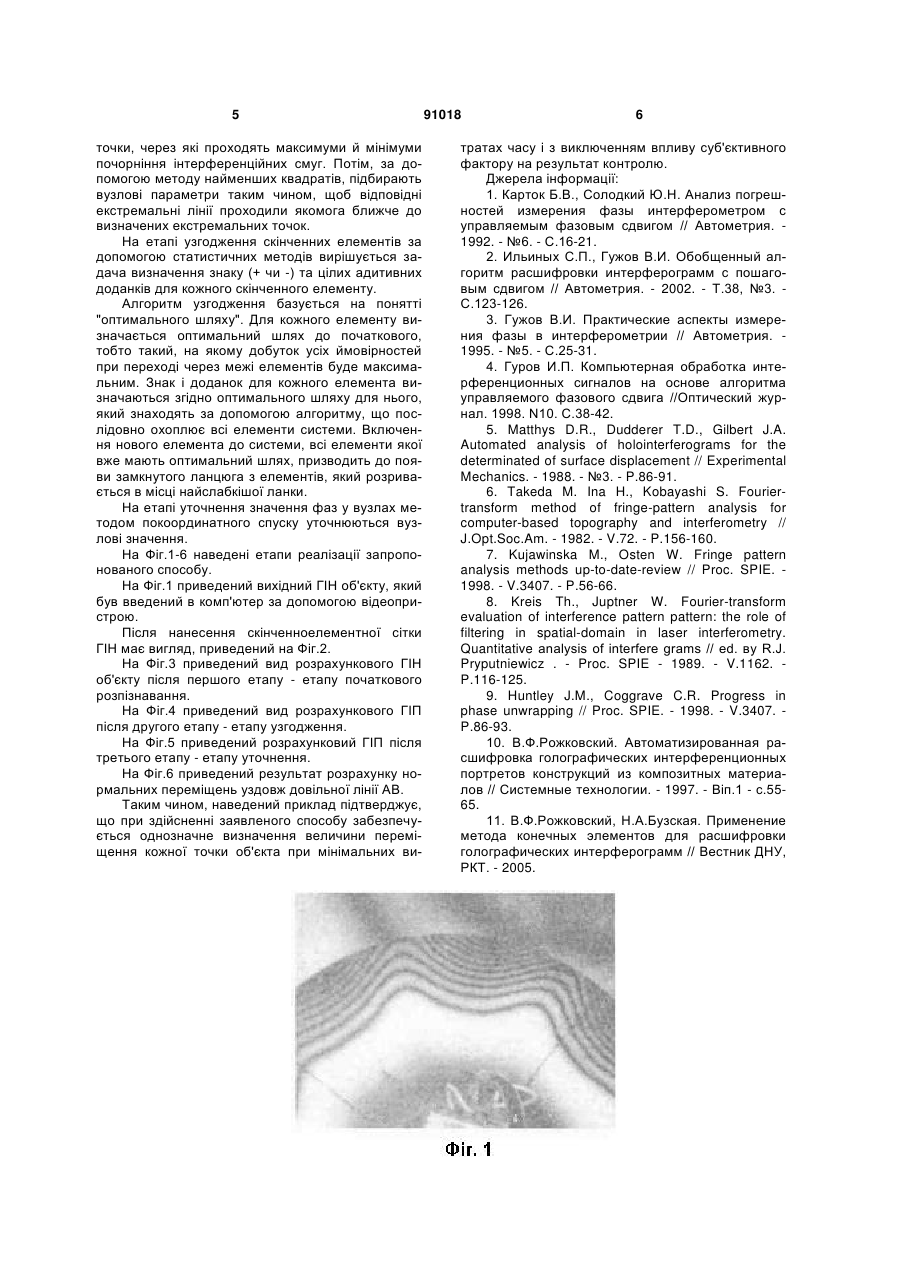
Спосіб визначення переміщень поверхні об'єкта за голографічним інтерференційним портретом, отриманим в процесі навантаження об'єкта, який полягає в тому, що за допомогою відеоприст 3 ють її з інтерференційною картиною смуг, отриманою при навантаженні об'єкта, що досліджується. Змінюючи кут нахилу, регулюють просторову частоту несучих смуг, що покривають поверхню ненавантаженого об'єкта. Картину несучих смуг створюють за допомогою нахилу фазової пластинки, що розташована в оптичній схемі інтерферометра в об'єктному пучці, нахилом досліджуваного об'єкта, зміною орієнтації опорного променя або самої голограми. Розшифровка інтеферограми, отриманої за методикою несучих смуг, з використанням класичного Фур'є-методу вимагає точного знання частоти несучих смуг. Крім того, необхідно виконати умову, що забезпечує однакову відстань між несучими смугами, що не завжди вдається. Найбільш близьким до винаходу по технічній суті є спосіб визначення переміщення поверхні об’єкта за голографічним інтерференційним портретом (ГІП), отриманим в процесі навантаження об'єкту, який полягає в тому, що за допомогою відеопристрою ГІП заводять до комп'ютера, виходячи з розподілу інтенсивності почорніння поверхні об'єкту, програмним способом визначають фазу світлової хвилі і, використовуючи формули зв'язку фази з величиною переміщень, визначають переміщення поверхні об'єкту. При цьому фаза світової хвилі визначається лише для точок скелетних смуг, тобто тих ліній на інтерферограмі, які є центральними для чорних і білих інтерференційних смуг [10]. Операція визначення цих ліній називається скелетизацією інтерферограми. Таким чином, операції розшифровки, тобто нумерацію смуг, визначення значень фаз, переміщень і деформацій, проводять лише для точок ліній скелету. Якщо лінії скелету пронумеровані послідовними номерами, які пов'язані із значеннями фаз на лініях, то інтерферограма вже не містить невизначеності у визначенні фаз. Тобто рішення задачі про усунення невизначеності визначення фаз у різних точках інтерферограми зводиться до задачі нумерації ліній скелету. Оскільки після скелетизації розглядається не все зображення об'єкту, а тільки лінії скелету, скелетизація інтерферограми дозволяє різко скоротити кількість операцій, необхідних для розшифровки інтерферограм. Разом з властивими йому перевагами підхід, заснований на скелетизації, має і недоліки. Вони пов'язані в основному з ненадійністю існуючих алгоритмів скелетизації, яка носить принциповий характер. Це пов'язано з тим, що не завжди двовимірний об'єкт (широку смугу) можна однозначно замінити одновимірним об'єктом - скелетною лінією. У зв'язку з цим після процесу автоматичної скелетизації необхідним є ручне виправлення недоліків скелету, яке вимагає значних трудовитрат оператора. В основу винаходу поставлено задачу удосконалення способу розшифровки інтерферограм, що забезпечить однозначне визначення величини переміщень кожної точки об'єкта при мінімальних витратах часу і зменшить вплив на результат контролю суб'єктивного фактору. Поставлена задача вирішується тим, що ГІП об'єкта, який контролюється, програмним спосо 91018 4 бом розбивають на скінченні елементи простої геометричної форми, задають зв'язок між інтенсивністю почорніння у вузлових точках цих елементів у вигляді полінома з невідомими коефіцієнтами, які визначаються шляхом мінімізації функціонала відхилень інтенсивності вихідного ГІП об'єкта і ГІП, отриманого розрахунковим способом з використанням значень фаз, які обчислені за допомогою вибраних поліномів. Спосіб реалізується таким чином: отримують ГІП об'єкта в процесі навантаження і за допомогою відеопристрою здійснюють передачу зображення до пам'яті комп'ютера. Програмним способом розбивають зображення об'єкта на скінченні елементи простої геометричної форми - трикутники або чотирикутники і визначають інтенсивність почорніння у вузлових точках скінченного елемента з номером і. Інтенсивність почорніння у довільній точці ГІП об'єкта визначається за формулою І(х, у)=І0(х, у)(1+cos(πφ(x, y))), (1) де х, у - координати точки на інтерферограмі; І(х,у) - результуюча освітленість; І0(х, у) - вихідна освітленість точки поверхні об'єкта, що визначає його фотографічне зображення; φ(х,у) - зміна фази, що викликана переміщенням точки поверхні об'єкта. В межах кожного скінченого елементу І0(х, у) вважається постійною. Розрахунковим методом визначають таку функцію φ(х,у), для якої функціонал J I x, y I0 x, y 1 cos2 x, y 2 d (2) має мінімальне значення. При цьому для кожного скінченного елементу φ(х,у) задають у вигляді поліному n x, y ai xui y (3) i i 1 де аі - коефіцієнти, які підлягають визначенню, nі - наперед задана кількість невизначених коефіцієнтів для кожного скінченного елемента, uі, vі - натуральні числа, які підбираються експериментальним шляхом. Наприклад, для n=4 оптимальними є такі значення величин uі, vі і uі vі 1 0 0 2 1 0 3 0 1 4 1 1 Тобто знаходять такі значення аі, для яких функціонал (2) буде мати мінімальне значення. Для здійснення цього способу може бути використаний наступний трьохетапний алгоритм [10]. На першому етапі (етапі початкового розпізнавання) відбувається визначення фаз у вузлах кожного елемента. На другому етапі (етапі узгодження) визначається знак фази та адитивний доданок до неї для кожного елемента. На третьому етапі (етапі уточнення), значення фаз у вузлах уточнюються вже у складі ансамблю елементів. Для вирішення задач початкового розпізнавання може бути використаний алгоритм, заснований на тому, що спочатку на ділянці кожного елемента визначають екстремальні точки, тобто 5 точки, через які проходять максимуми й мінімуми почорніння інтерференційних смуг. Потім, за допомогою методу найменших квадратів, підбирають вузлові параметри таким чином, щоб відповідні екстремальні лінії проходили якомога ближче до визначених екстремальних точок. На етапі узгодження скінченних елементів за допомогою статистичних методів вирішується задача визначення знаку (+ чи -) та цілих адитивних доданків для кожного скінченного елементу. Алгоритм узгодження базується на понятті "оптимального шляху". Для кожного елементу визначається оптимальний шлях до початкового, тобто такий, на якому добуток усіх ймовірностей при переході через межі елементів буде максимальним. Знак і доданок для кожного елемента визначаються згідно оптимального шляху для нього, який знаходять за допомогою алгоритму, що послідовно охоплює всі елементи системи. Включення нового елемента до системи, всі елементи якої вже мають оптимальний шлях, призводить до появи замкнутого ланцюга з елементів, який розривається в місці найслабкішої ланки. На етапі уточнення значення фаз у вузлах методом покоординатного спуску уточнюються вузлові значення. На Фіг.1-6 наведені етапи реалізації запропонованого способу. На Фіг.1 приведений вихідний ГІН об'єкту, який був введений в комп'ютер за допомогою відеопристрою. Після нанесення скінченноелементної сітки ГІН має вигляд, приведений на Фіг.2. На Фіг.3 приведений вид розрахункового ГІН об'єкту після першого етапу - етапу початкового розпізнавання. На Фіг.4 приведений вид розрахункового ГІП після другого етапу - етапу узгодження. На Фіг.5 приведений розрахунковий ГІП після третього етапу - етапу уточнення. На Фіг.6 приведений результат розрахунку нормальних переміщень уздовж довільної лінії АВ. Таким чином, наведений приклад підтверджує, що при здійсненні заявленого способу забезпечується однозначне визначення величини переміщення кожної точки об'єкта при мінімальних ви 91018 6 тратах часу і з виключенням впливу суб'єктивного фактору на результат контролю. Джерела інформації: 1. Карток Б.В., Солодкий Ю.Н. Анализ погрешностей измерения фазы интерферометром с управляемым фазовым сдвигом // Автометрия. 1992. - №6. - С.16-21. 2. Ильиных С.П., Гужов В.И. Обобщенный алгоритм расшифровки интерферограмм с пошаговым сдвигом // Автометрия. - 2002. - Т.38, №3. С.123-126. 3. Гужов В.И. Практические аспекты измерения фазы в интерферометрии // Автометрия. 1995. - №5. - С.25-31. 4. Гуров И.П. Компьютерная обработка интерференционных сигналов на основе алгоритма управляемого фазового сдвига //Оптический журнал. 1998. N10. С.38-42. 5. Matthys D.R., Dudderer T.D., Gilbert J.A. Automated analysis of holointerferograms for the determinated of surface displacement // Experimental Mechanics. - 1988. - №3. - P.86-91. 6. Takeda M. Ina H., Kobayashi S. Fouriertransform method of fringe-pattern analysis for computer-based topography and interferometry // J.Opt.Soc.Am. - 1982. - V.72. - P.156-160. 7. Kujawinska M., Osten W. Fringe pattern analysis methods up-to-date-review // Proc. SPIE. 1998. - V.3407. - P.56-66. 8. Kreis Th., Juptner W. Fourier-transform evaluation of interference pattern pattern: the role of filtering in spatial-domain in laser interferometry. Quantitative analysis of interfere grams // ed. ву R.J. Pryputniewicz . - Proc. SPIE - 1989. - V.1162. P.116-125. 9. Huntley J.M., Coggrave C.R. Progress in phase unwrapping // Proc. SPIE. - 1998. - V.3407. P.86-93. 10. В.Ф.Рожковский. Автоматизированная расшифровка голографических интерференционных портретов конструкций из композитных материалов // Системные технологии. - 1997. - Віп.1 - с.5565. 11. В.Ф.Рожковский, Н.А.Бузская. Применение метода конечных элементов для расшифровки голографических интерферограмм // Вестник ДНУ, РКТ. - 2005. 7 Комп’ютерна верстка Н. Лиcенко 91018 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of displacements of surface of an object
Автори англійськоюRozhkovskyi Volodymyr Faustovych, Sokhach Yurii Vasyliovych, Buzska Natalia Oleksandrivna
Назва патенту російськоюСпособ определения перемещений поверхности объекта
Автори російськоюРожковский Владимир Фаустович, Сохач Юрий Васильевич, Бузская Наталия Александровна
МПК / Мітки
МПК: G01B 9/00
Мітки: спосіб, переміщень, поверхні, об'єкта, визначення
Код посилання
<a href="https://ua.patents.su/4-91018-sposib-viznachennya-peremishhen-poverkhni-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення переміщень поверхні об’єкта</a>
Спосіб визначення переміщень поверхні об’єкта
Номер патенту: 23716
Опубліковано: 11.06.2007
Автори: Рожковський Володимир Фаустович, Бузьська Наталія Олександрівна, Сохач Юрій Васильович
МПК: G01B 9/021
Мітки: визначення, об'єкта, поверхні, переміщень, спосіб
Формула / Реферат:
Спосіб визначення переміщень поверхні об'єкта за голографічним інтерференційним портретом, отриманим в процесі навантаження об’єкта, який полягає в тому, що за допомогою відеопристрою голографічний інтерференційний портрет заводять до комп'ютера, виходячи із розподілу інтенсивності почорніння поверхні об’єкта, зображеного на голографічному інтерференційному портреті, програмним способом визначають фазу світлової хвилі і, використовуючи...
Спосіб визначення переміщень контактної поверхні об’єкта
Номер патенту: 47581
Опубліковано: 15.07.2002
Автор: Гріневський Андрій Григорович
МПК: G01B 9/00, G01B 11/16
Мітки: переміщень, визначення, поверхні, об'єкта, спосіб, контактної
Формула / Реферат:
Спосіб визначення переміщень контактної поверхні об'єкта, що полягає в здійсненні контакту поверхні досліджуваного об'єкта з поверхнею опорної деталі, виконаної з прозорого матеріалу, освітленні поверхні об'єкта через опорну деталь пучком когерентного випромінювання під кутом, меншим кута повного внутрішнього відбиття, формуванні опорного пучка шляхом направлення колімованого пучка когерентного випромінювання на поверхню об'єкта через опорну...
Спосіб оцінки переміщень поверхні
Номер патенту: 42866
Опубліковано: 27.07.2009
Автори: Коноваленко Ігор Володимирович, Біщак Роман Теодорович, Марущак Павло Орестович, Окіпний Ігор Богданович
МПК: G01N 25/72
Мітки: переміщень, поверхні, спосіб, оцінки
Формула / Реферат:
Спосіб оцінки переміщень поверхні, при якому одержують зображення аналізованої ділянки, усувають компоненти зображення, менші за задану величину, проводять обчислення зміщення між опорним і поточним кадром за дискретним набором чисел, який відрізняється тим, що на досліджену поверхню попередньо наносять сітку маркерів, а зображення одержують цифровим методом у вигляді матриці яскравості, проводять адаптивне бінарне перетворення, кластеризацію...
Спосіб визначення горизонтальних деформацій земної поверхні
Номер патенту: 28162
Опубліковано: 26.11.2007
Автор: Светницький Сергій Олексійович
МПК: G01C 5/00
Мітки: земної, горизонтальних, спосіб, поверхні, деформацій, визначення
Формула / Реферат:
Спосіб визначення горизонтальних деформацій земної поверхні, який включає вимірювання вертикальних переміщень і деформацій, який відрізняється тим, що горизонтальні деформації визначають на основі формули:,де та - перша...
Спосіб визначення рівнодійної поздовжніх дотичних зусиль на поверхні підземного трубопроводу
Номер патенту: 40950
Опубліковано: 27.04.2009
Автор: Светницький Сергій Олексійович
МПК: G01C 3/00
Мітки: визначення, дотичних, спосіб, підземного, рівнодійної, зусиль, поверхні, трубопроводу, поздовжніх
Формула / Реферат:
Спосіб визначення рівнодійної поздовжніх дотичних зусиль на поверхні підземного трубопроводу, що включає визначення горизонтальних деформацій земної поверхні, який відрізняється тим, що шляхом систематичного вимірювання горизонтальних поздовжніх переміщень фіксованих перерізів трубопроводу відносно спеціальних реперів визначають переміщення трубопроводу як різницю виміряних горизонтальних переміщень земної поверхні і переміщень трубопроводу...
Попередній патент: Спосіб і пристрій для керування рознесенням прийому в безпровідному зв’язку
Наступний патент: Пристрій для ін’єкцій
Випадковий патент: Плавильно-ливарний комплекс для напівбезперервного лиття зливків з алюмінієвих сплавів