Спосіб оцінки переміщень поверхні
Номер патенту: 42866
Опубліковано: 27.07.2009
Автори: Марущак Павло Орестович, Коноваленко Ігор Володимирович, Біщак Роман Теодорович, Окіпний Ігор Богданович
Формула / Реферат
Спосіб оцінки переміщень поверхні, при якому одержують зображення аналізованої ділянки, усувають компоненти зображення, менші за задану величину, проводять обчислення зміщення між опорним і поточним кадром за дискретним набором чисел, який відрізняється тим, що на досліджену поверхню попередньо наносять сітку маркерів, а зображення одержують цифровим методом у вигляді матриці яскравості, проводять адаптивне бінарне перетворення, кластеризацію та розраховують усереднене зміщення кожного маркера.
Текст
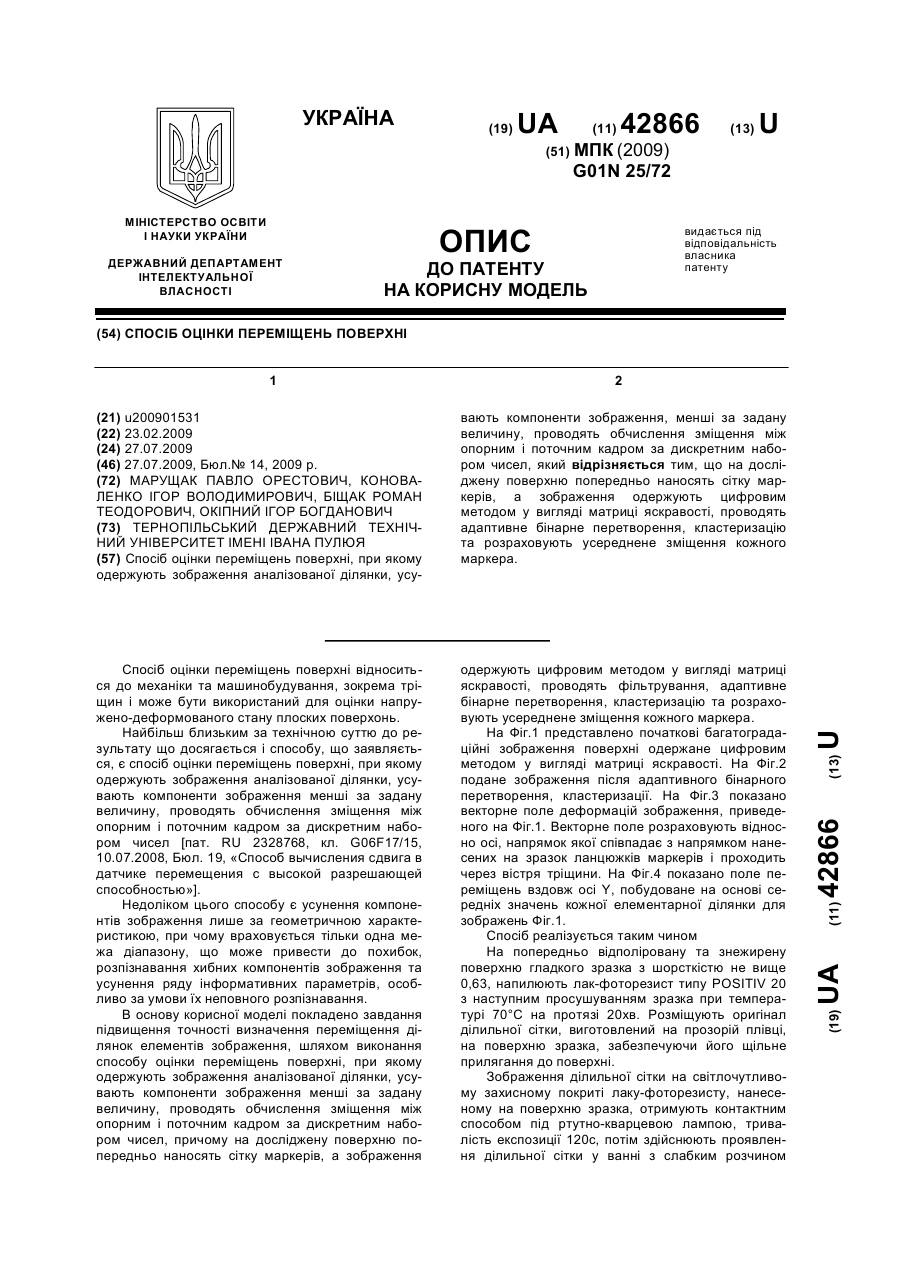
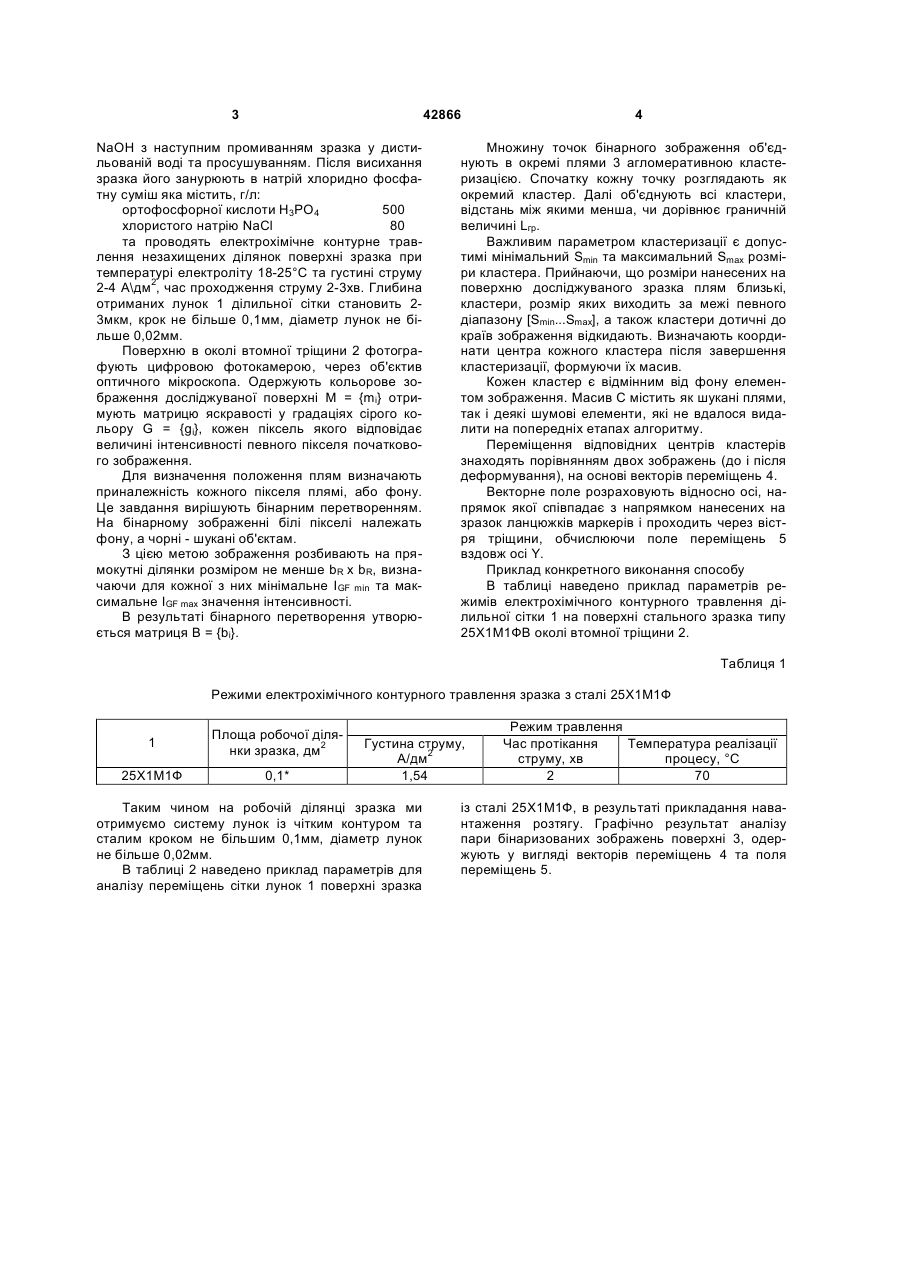
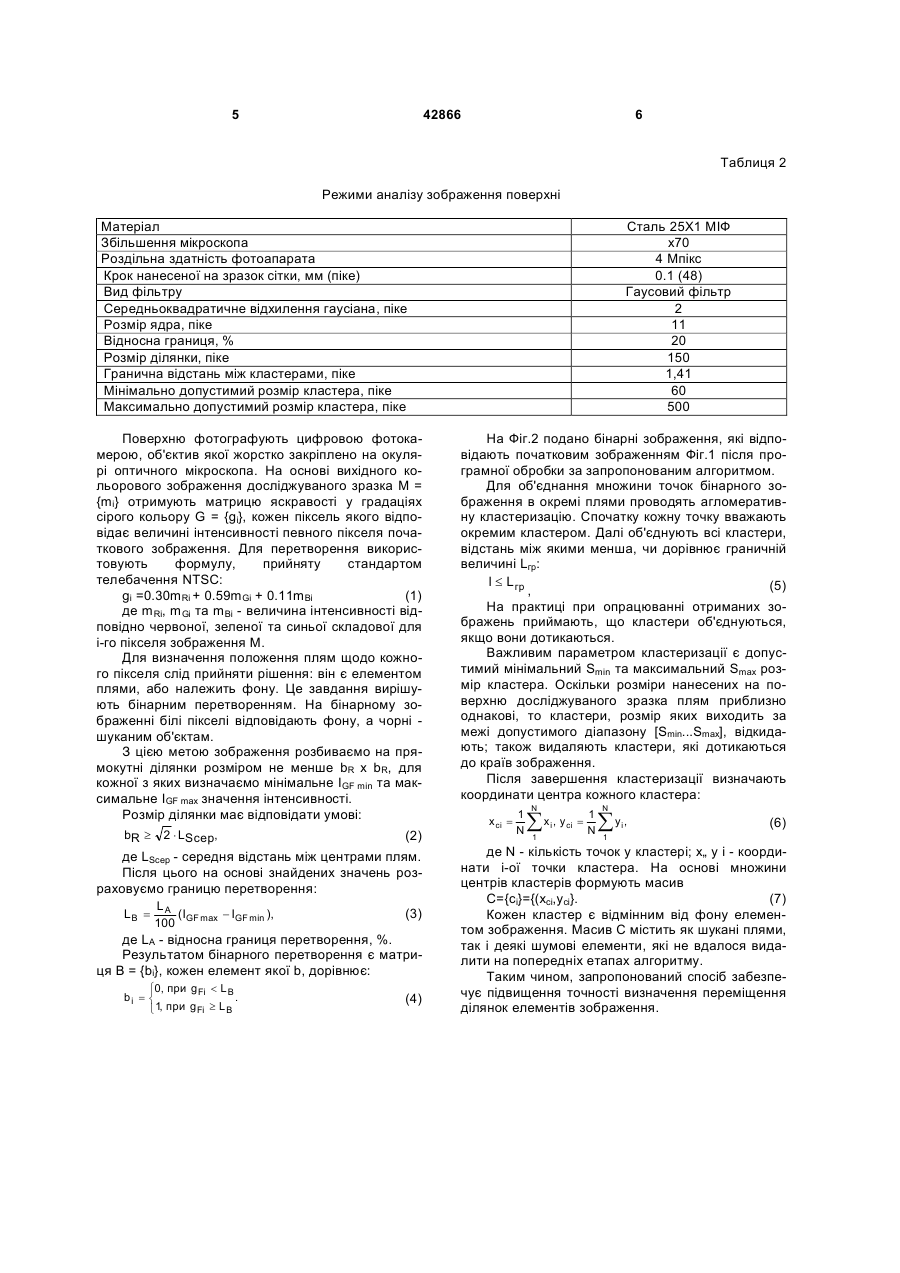
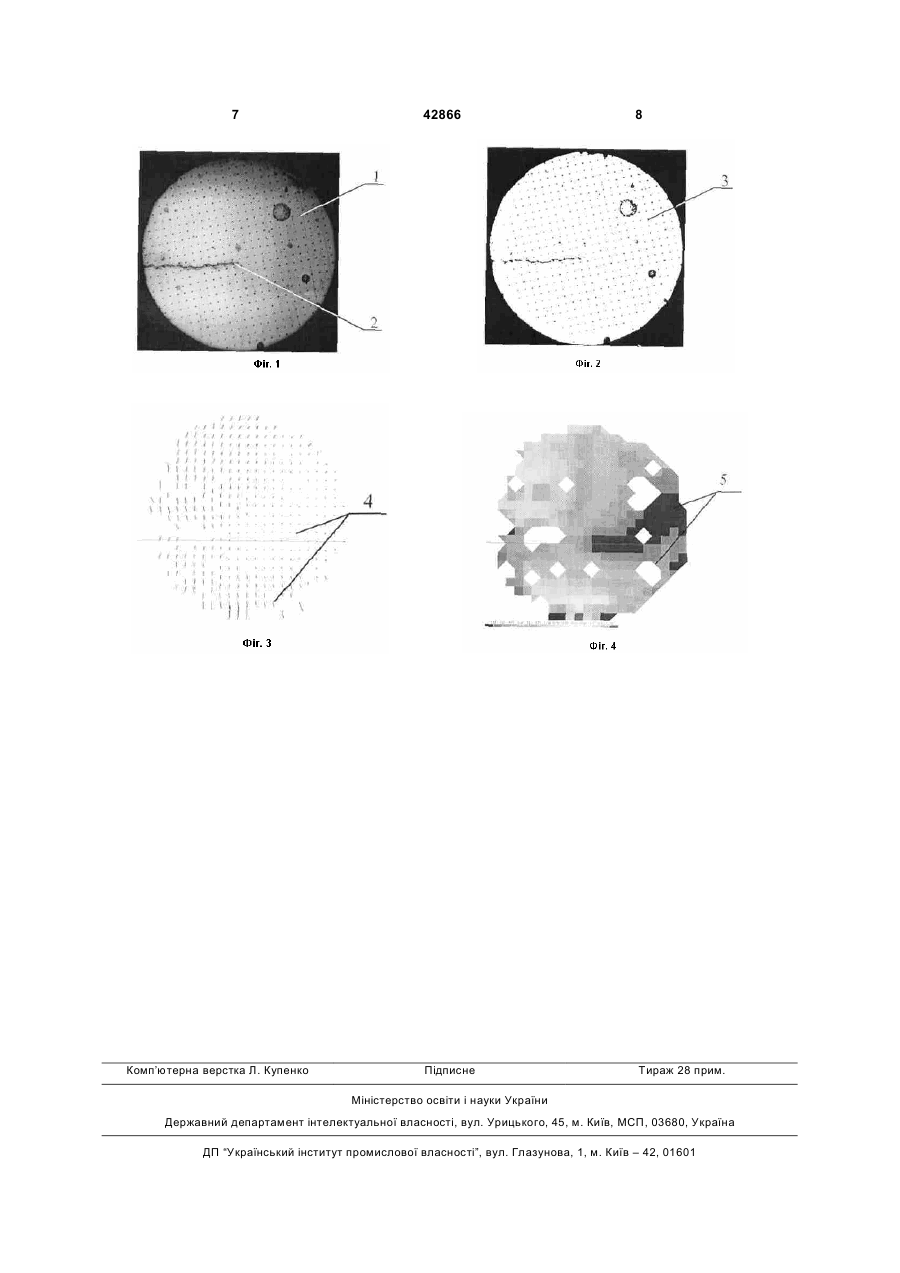
Спосіб оцінки переміщень поверхні, при якому одержують зображення аналізованої ділянки, усу 3 42866 NaOH з наступним промиванням зразка у дистильованій воді та просушуванням. Після висихання зразка його занурюють в натрій хлоридно фосфатну суміш яка містить, г/л: ортофосфорної кислоти Н3РO4 500 хлористого натрію NaCl 80 та проводять електрохімічне контурне травлення незахищених ділянок поверхні зразка при температурі електроліту 18-25°С та густині струму 2-4 А\дм2, час проходження струму 2-3хв. Глибина отриманих лунок 1 ділильної сітки становить 23мкм, крок не більше 0,1мм, діаметр лунок не більше 0,02мм. Поверхню в околі втомної тріщини 2 фотографують цифровою фотокамерою, через об'єктив оптичного мікроскопа. Одержують кольорове зображення досліджуваної поверхні М = {mi} отримують матрицю яскравості у градаціях сірого кольору G = {gi}, кожен піксель якого відповідає величині інтенсивності певного пікселя початкового зображення. Для визначення положення плям визначають приналежність кожного пікселя плямі, або фону. Це завдання вирішують бінарним перетворенням. На бінарному зображенні білі пікселі належать фону, а чорні - шукані об'єктам. З цією метою зображення розбивають на прямокутні ділянки розміром не менше bR х bR, визначаючи для кожної з них мінімальне IGF min та максимальне IGF max значення інтенсивності. В результаті бінарного перетворення утворюється матриця В = {bi}. 4 Множину точок бінарного зображення об'єднують в окремі плями 3 агломеративною кластеризацією. Спочатку кожну точку розглядають як окремий кластер. Далі об'єднують всі кластери, відстань між якими менша, чи дорівнює граничній величині Lгр. Важливим параметром кластеризації є допустимі мінімальний Smin та максимальний Smax розміри кластера. Прийнаючи, що розміри нанесених на поверхню досліджуваного зразка плям близькі, кластери, розмір яких виходить за межі певного діапазону [Smin...Smax], а також кластери дотичні до країв зображення відкидають. Визначають координати центра кожного кластера після завершення кластеризації, формуючи їх масив. Кожен кластер є відмінним від фону елементом зображення. Масив С містить як шукані плями, так і деякі шумові елементи, які не вдалося видалити на попередніх етапах алгоритму. Переміщення відповідних центрів кластерів знаходять порівнянням двох зображень (до і після деформування), на основі векторів переміщень 4. Векторне поле розраховують відносно осі, напрямок якої співпадає з напрямком нанесених на зразок ланцюжків маркерів і проходить через вістря тріщини, обчислюючи поле переміщень 5 вздовж осі Y. Приклад конкретного виконання способу В таблиці наведено приклад параметрів режимів електрохімічного контурного травлення ділильної сітки 1 на поверхні стального зразка типу 25Х1М1ФВ околі втомної тріщини 2. Таблиця 1 Режими електрохімічного контурного травлення зразка з сталі 25Х1М1Ф 1 Площа робочої ділянки зразка, дм2 25Х1М1Ф 0,1* Густина струму, А/дм2 1,54 Таким чином на робочій ділянці зразка ми отримуємо систему лунок із чітким контуром та сталим кроком не більшим 0,1мм, діаметр лунок не більше 0,02мм. В таблиці 2 наведено приклад параметрів для аналізу переміщень сітки лунок 1 поверхні зразка Режим травлення Час протікання Температура реалізації струму, хв процесу, °С 2 70 із сталі 25Х1М1Ф, в результаті прикладання навантаження розтягу. Графічно результат аналізу пари бінаризованих зображень поверхні 3, одержують у вигляді векторів переміщень 4 та поля переміщень 5. 5 42866 6 Таблиця 2 Режими аналізу зображення поверхні Матеріал Збільшення мікроскопа Роздільна здатність фотоапарата Крок нанесеної на зразок сітки, мм (піке) Вид фільтру Середньоквадратичне відхилення гаусіана, піке Розмір ядра, піке Відносна границя, % Розмір ділянки, піке Гранична відстань між кластерами, піке Мінімально допустимий розмір кластера, піке Максимально допустимий розмір кластера, піке Поверхню фотографують цифровою фотокамерою, об'єктив якої жорстко закріплено на окулярі оптичного мікроскопа. На основі вихідного кольорового зображення досліджуваного зразка М = {mi} отримують матрицю яскравості у градаціях сірого кольору G = {gi}, кожен піксель якого відповідає величині інтенсивності певного пікселя початкового зображення. Для перетворення використовують формулу, прийняту стандартом телебачення NTSC: gi =0.30mRi + 0.59mGi + 0.11mBi (1) де m Ri, m Gi та mBi - величина інтенсивності відповідно червоної, зеленої та синьої складової для і-го пікселя зображення М. Для визначення положення плям щодо кожного пікселя слід прийняти рішення: він є елементом плями, або належить фону. Це завдання вирішують бінарним перетворенням. На бінарному зображенні білі пікселі відповідають фону, а чорні шуканим об'єктам. З цією метою зображення розбиваємо на прямокутні ділянки розміром не менше bR х bR, для кожної з яких визначаємо мінімальне IGF min та максимальне IGF max значення інтенсивності. Розмір ділянки має відповідати умові: bR ³ 2 × LScep, (2) де LScep - середня відстань між центрами плям. Після цього на основі знайдених значень розраховуємо границю перетворення: LB = LA (IGF max - IGF min ), 100 (3) де LA - відносна границя перетворення, %. Результатом бінарного перетворення є матриця В = {bi}, кожен елемент якої b, дорівнює: ì0, при gFi < L B bi = í . î1, при gFi ³ L B (4) Сталь 25Х1 МІФ х70 4 Мпікс 0.1 (48) Гаусовий фільтр 2 11 20 150 1,41 60 500 На Фіг.2 подано бінарні зображення, які відповідають початковим зображенням Фіг.1 після програмної обробки за запропонованим алгоритмом. Для об'єднання множини точок бінарного зображення в окремі плями проводять агломеративну кластеризацію. Спочатку кожну точку вважають окремим кластером. Далі об'єднують всі кластери, відстань між якими менша, чи дорівнює граничній величині Lгр: l £ L гр (5) , На практиці при опрацюванні отриманих зображень приймають, що кластери об'єднуються, якщо вони дотикаються. Важливим параметром кластеризації є допустимий мінімальний Smin та максимальний Smax розмір кластера. Оскільки розміри нанесених на поверхню досліджуваного зразка плям приблизно однакові, то кластери, розмір яких виходить за межі допустимого діапазону [Smin...Smax], відкидають; також видаляють кластери, які дотикаються до країв зображення. Після завершення кластеризації визначають координати центра кожного кластера: x ci = 1 N N åx , y i 1 ci = 1 N N åy , i (6) 1 де N - кількість точок у кластері; х„ у і - координати i-ої точки кластера. На основі множини центрів кластерів формують масив С={сi}={(хci,уci}. (7) Кожен кластер є відмінним від фону елементом зображення. Масив C містить як шукані плями, так і деякі шумові елементи, які не вдалося видалити на попередніх етапах алгоритму. Таким чином, запропонований спосіб забезпечує підвищення точності визначення переміщення ділянок елементів зображення. 7 Комп’ютерна верстка Л. Купенко 42866 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for evaluation of displacements of surface
Автори англійськоюMaruschak Pavlo Orestovych, Konovalenko Ihor Volodymyrovych, Bischak Roman Teodorovych, Okipnyi Ihor Bohdanovych
Назва патенту російськоюМетод оценки перемещений поверхности
Автори російськоюМарущак Павел Орестович, Коноваленко Игорь Владимирович, Бищак Роман Теодорович, Окипный Игорь Богданович
МПК / Мітки
МПК: G01N 25/72
Мітки: спосіб, поверхні, оцінки, переміщень
Код посилання
<a href="https://ua.patents.su/4-42866-sposib-ocinki-peremishhen-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Спосіб оцінки переміщень поверхні</a>
Спосіб визначення переміщень контактної поверхні об’єкта
Номер патенту: 47581
Опубліковано: 15.07.2002
Автор: Гріневський Андрій Григорович
МПК: G01B 9/00, G01B 11/16
Мітки: спосіб, контактної, об'єкта, визначення, поверхні, переміщень
Формула / Реферат:
Спосіб визначення переміщень контактної поверхні об'єкта, що полягає в здійсненні контакту поверхні досліджуваного об'єкта з поверхнею опорної деталі, виконаної з прозорого матеріалу, освітленні поверхні об'єкта через опорну деталь пучком когерентного випромінювання під кутом, меншим кута повного внутрішнього відбиття, формуванні опорного пучка шляхом направлення колімованого пучка когерентного випромінювання на поверхню об'єкта через опорну...
Спосіб оцінки пошкодженості поверхні тріщинами термовтоми
Номер патенту: 40788
Опубліковано: 27.04.2009
Автори: Біщак Роман Теодорович, Марущак Павло Орестович, Коноваленко Ігор Володимирович
МПК: G01N 25/72
Мітки: термовтоми, пошкодженості, тріщинами, поверхні, спосіб, оцінки
Формула / Реферат:
Спосіб оцінки пошкодженості поверхні тріщинами термовтоми, при якому пошкоджену поверхню фотографують, зображення вводять в комп'ютер, ідентифікують тріщини на зображенні, здійснюють визначення розподілу нормованої площі тріщин, який відрізняється тим, що як бази вимірювань використовують ділянку поверхні прямокутної форми, накладають на неї каркасну сітку з прямокутними комірками кроком, який становить половину товщини тріщини.
Спосіб визначення переміщень поверхні об’єкта
Номер патенту: 23716
Опубліковано: 11.06.2007
Автори: Рожковський Володимир Фаустович, Сохач Юрій Васильович, Бузьська Наталія Олександрівна
МПК: G01B 9/021
Мітки: визначення, об'єкта, поверхні, спосіб, переміщень
Формула / Реферат:
Спосіб визначення переміщень поверхні об'єкта за голографічним інтерференційним портретом, отриманим в процесі навантаження об’єкта, який полягає в тому, що за допомогою відеопристрою голографічний інтерференційний портрет заводять до комп'ютера, виходячи із розподілу інтенсивності почорніння поверхні об’єкта, зображеного на голографічному інтерференційному портреті, програмним способом визначають фазу світлової хвилі і, використовуючи...
Спосіб оцінки шорсткості поверхні реставраційної роботи після полірування в стоматології
Номер патенту: 85718
Опубліковано: 25.02.2009
Автори: Удод Олександр Анатолійович, Челях Олена Миколаївна
МПК: G01N 21/00, A61C 19/04
Мітки: поверхні, оцінки, стоматології, шорсткості, спосіб, полірування, реставраційної, роботи
Формула / Реферат:
Спосіб оцінки шорсткості поверхні реставраційної роботи після полірування в стоматології шляхом визначення ступеня шорсткості поверхні, який відрізняється тим, що проводять кількісну оцінку шорсткості поверхні реставрації безпосередньо у порожнині рота шляхом комп'ютерного аналізу зображення досліджуваної ділянки, одержаного за допомогою цифрової фотокамери у довгохвильовому та середньохвильовому спектральних діапазонах, одержують гістограми...
Спосіб оцінки відділення шлакового покриття від поверхні наплавленого металу
Номер патенту: 25928
Опубліковано: 27.08.2007
Автори: Бойко Ігор Володимирович, Карпенко Володимир Михайлович, Богуцький Олександр Андрійович, Гринь Олександр Григорович
МПК: B23K 28/00
Мітки: відділення, шлакового, спосіб, металу, поверхні, наплавленого, оцінки, покриття
Формула / Реферат:
Спосіб оцінки відділення шлакового покриття від поверхні наплавленого металу, при якому виконують зварний шов на підготовленому зразку, піддають його впливу ударного навантаження з величиною енергії удару, недостатньою для деформування зразка і визначають оцінку відділення шлакового покриття, який відрізняється тим, що наплавлення виконують в один шар на поверхні плоскої пластини, другий валик наплавляють з перекриттям першого на половину...
Попередній патент: Робоче обладнання бульдозера
Наступний патент: Реактивний елемент
Випадковий патент: Спосіб шліфування деталей із сталей з метастабільною структурою