Система управління біотехнічними об’єктами
Номер патенту: 92971
Опубліковано: 10.09.2014
Автори: Болбот Ігор Михайлович, Заєць Наталія Анатоліївна, Дудник Алла Олексіївна, Штепа Володимир Миколайович, Лисенко Віталій Пилипович, Лендєл Тарас Іванович

Формула / Реферат
Система управління біотехнічними об'єктами, що включає локальну систему управління та підсистему прийняття рішень, яка відрізняється тим, що підсистема прийняття рішень додатково містить блок оптимізації нейронної мережі на основі використання генетичного алгоритму.
Текст
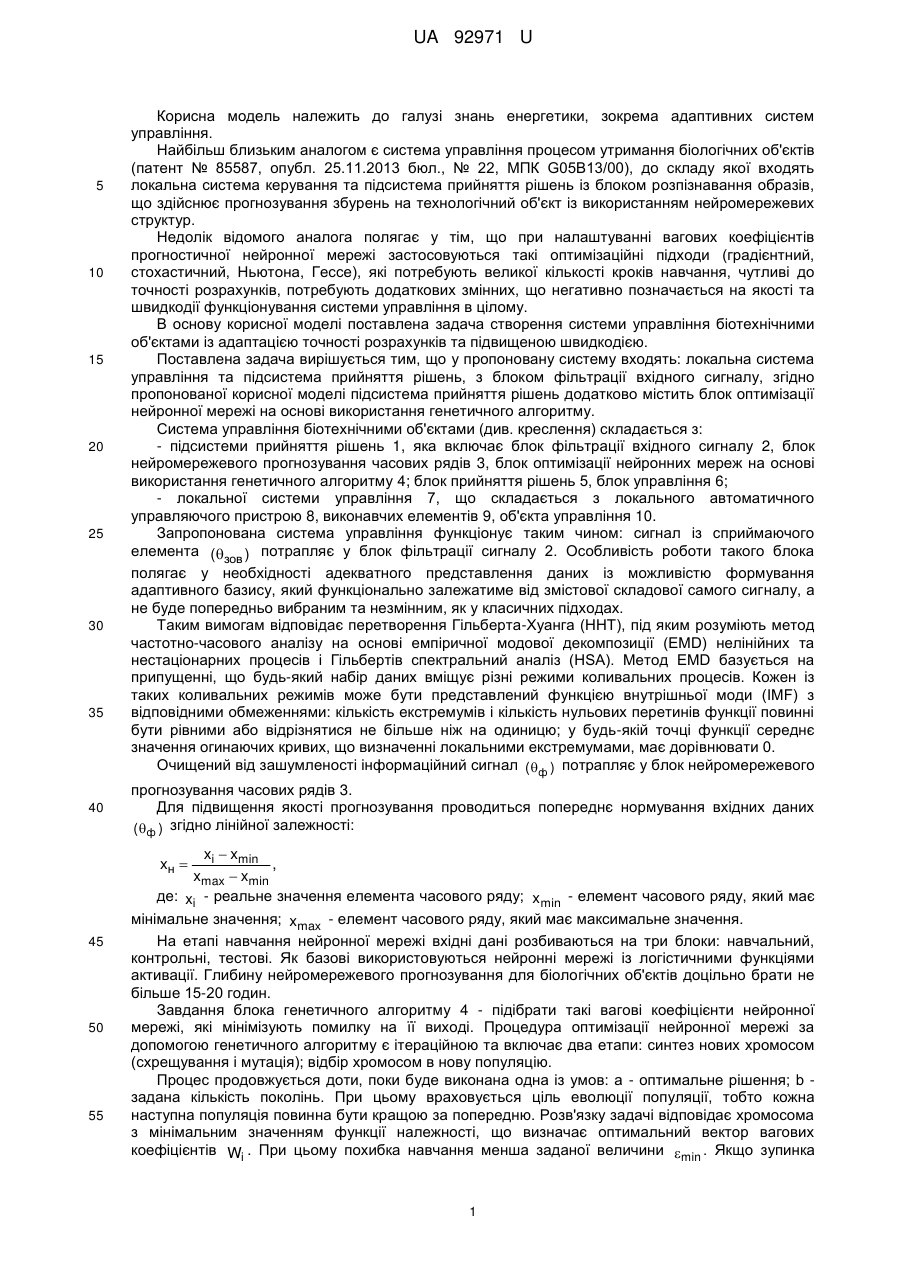
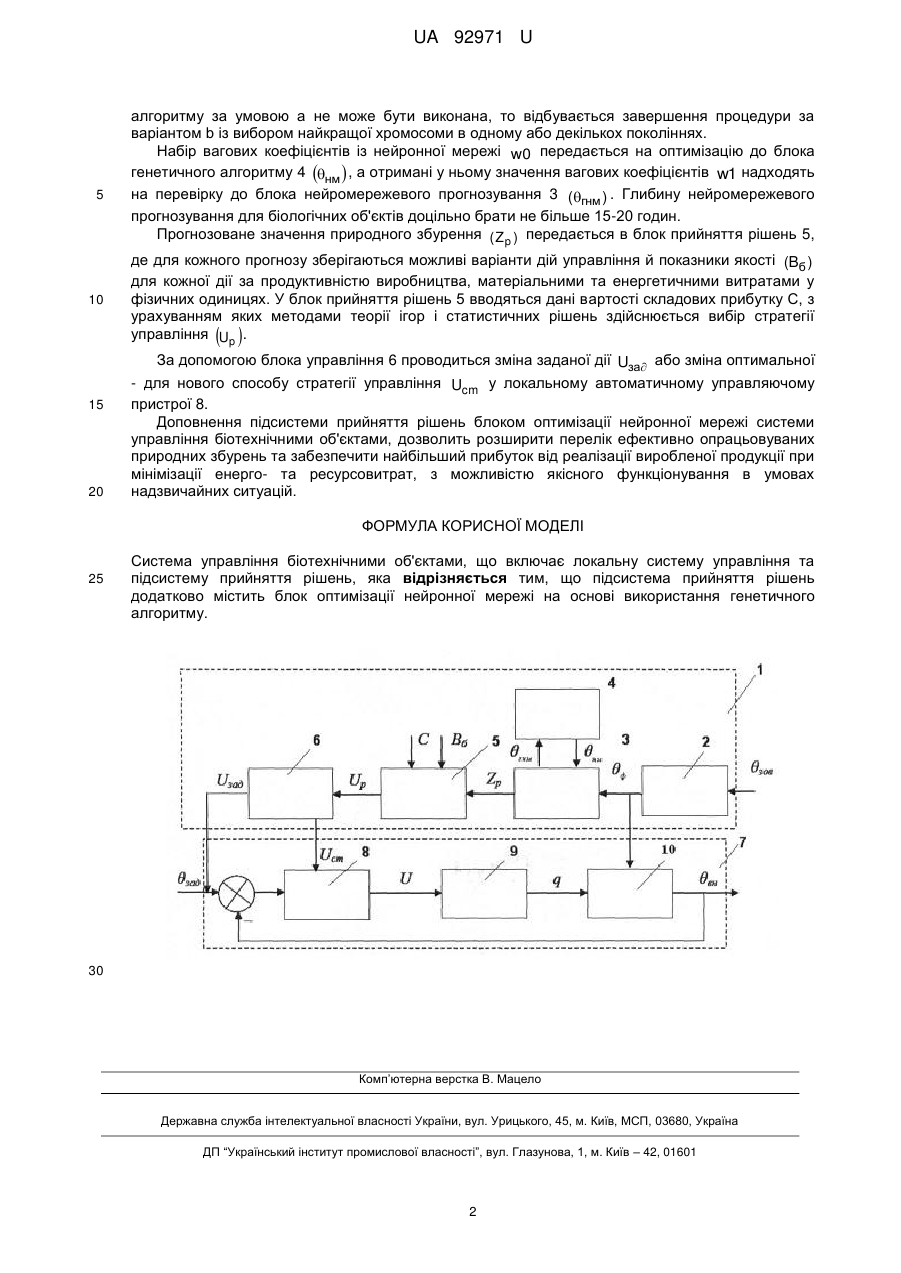
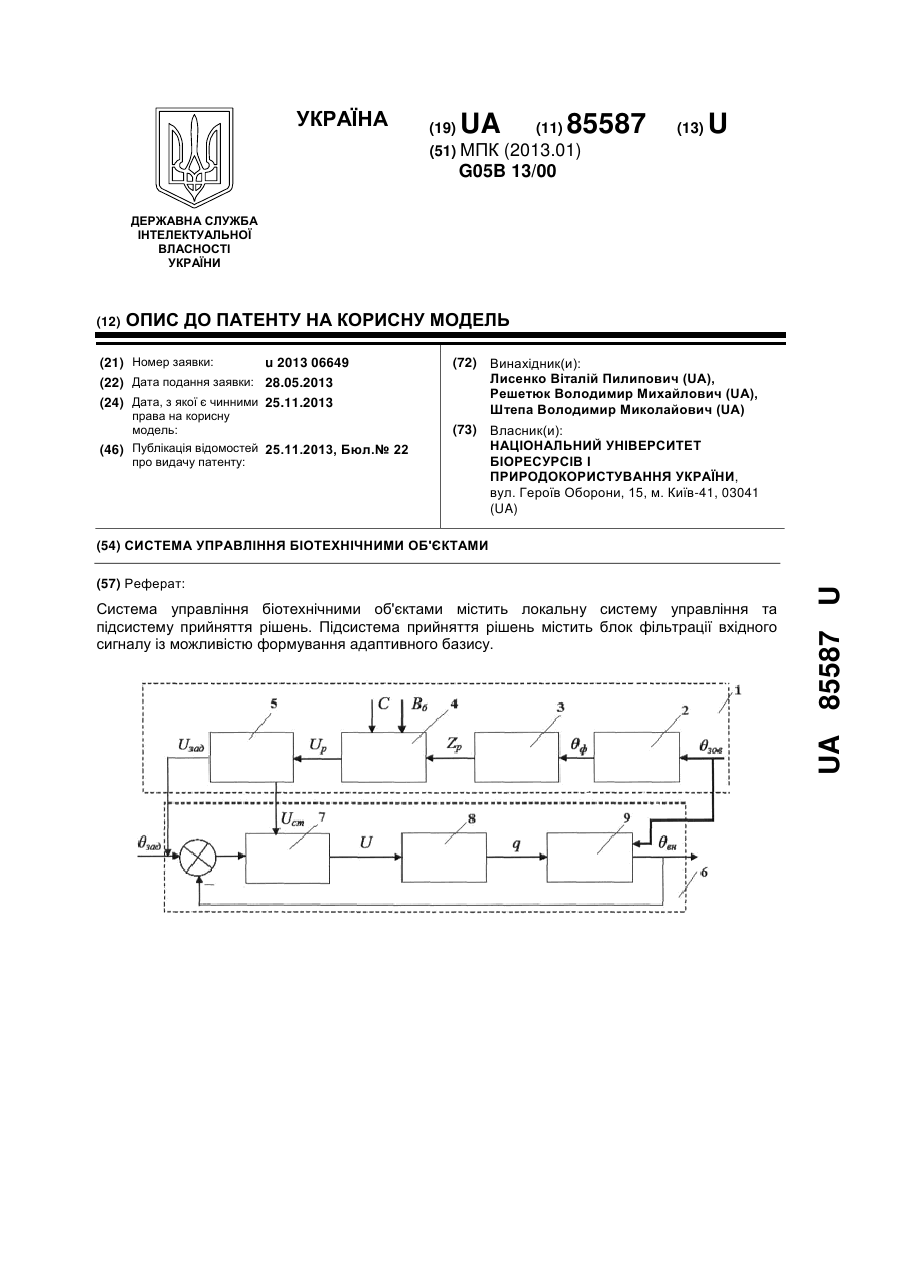
Реферат: Система управління біотехнічними об'єктами включає локальну систему управління та підсистему прийняття рішень. Підсистема прийняття рішень додатково містить блок оптимізації нейронної мережі на основі використання генетичного алгоритму. UA 92971 U (12) UA 92971 U UA 92971 U 5 10 15 20 25 30 35 40 Корисна модель належить до галузі знань енергетики, зокрема адаптивних систем управління. Найбільш близьким аналогом є система управління процесом утримання біологічних об'єктів (патент № 85587, опубл. 25.11.2013 бюл., № 22, МПК G05B13/00), до складу якої входять локальна система керування та підсистема прийняття рішень із блоком розпізнавання образів, що здійснює прогнозування збурень на технологічний об'єкт із використанням нейромережевих структур. Недолік відомого аналога полягає у тім, що при налаштуванні вагових коефіцієнтів прогностичної нейронної мережі застосовуються такі оптимізаційні підходи (градієнтний, стохастичний, Ньютона, Гессе), які потребують великої кількості кроків навчання, чутливі до точності розрахунків, потребують додаткових змінних, що негативно позначається на якості та швидкодії функціонування системи управління в цілому. В основу корисної моделі поставлена задача створення системи управління біотехнічними об'єктами із адаптацією точності розрахунків та підвищеною швидкодією. Поставлена задача вирішується тим, що у пропоновану систему входять: локальна система управління та підсистема прийняття рішень, з блоком фільтрації вхідного сигналу, згідно пропонованої корисної моделі підсистема прийняття рішень додатково містить блок оптимізації нейронної мережі на основі використання генетичного алгоритму. Система управління біотехнічними об'єктами (див. креслення) складається з: - підсистеми прийняття рішень 1, яка включає блок фільтрації вхідного сигналу 2, блок нейромережевого прогнозування часових рядів 3, блок оптимізації нейронних мереж на основі використання генетичного алгоритму 4; блок прийняття рішень 5, блок управління 6; - локальної системи управління 7, що складається з локального автоматичного управляючого пристрою 8, виконавчих елементів 9, об'єкта управління 10. Запропонована система управління функціонує таким чином: сигнал із сприймаючого елемента (зов ) потрапляє у блок фільтрації сигналу 2. Особливість роботи такого блока полягає у необхідності адекватного представлення даних із можливістю формування адаптивного базису, який функціонально залежатиме від змістової складової самого сигналу, а не буде попередньо вибраним та незмінним, як у класичних підходах. Таким вимогам відповідає перетворення Гільберта-Хуанга (ННТ), під яким розуміють метод частотно-часового аналізу на основі емпіричної модової декомпозиції (EMD) нелінійних та нестаціонарних процесів і Гільбертів спектральний аналіз (HSA). Метод EMD базується на припущенні, що будь-який набір даних вміщує різні режими коливальних процесів. Кожен із таких коливальних режимів може бути представлений функцією внутрішньої моди (IMF) з відповідними обмеженнями: кількість екстремумів і кількість нульових перетинів функції повинні бути рівними або відрізнятися не більше ніж на одиницю; у будь-якій точці функції середнє значення огинаючих кривих, що визначенні локальними екстремумами, має дорівнювати 0. Очищений від зашумленості інформаційний сигнал ( ф ) потрапляє у блок нейромережевого прогнозування часових рядів 3. Для підвищення якості прогнозування проводиться попереднє нормування вхідних даних ( ф ) згідно лінійної залежності: xi xmin , xmax xmin де: xi - реальне значення елемента часового ряду; xmin - елемент часового ряду, який має мінімальне значення; xmax - елемент часового ряду, який має максимальне значення. На етапі навчання нейронної мережі вхідні дані розбиваються на три блоки: навчальний, контрольні, тестові. Як базові використовуються нейронні мережі із логістичними функціями активації. Глибину нейромережевого прогнозування для біологічних об'єктів доцільно брати не більше 15-20 годин. Завдання блока генетичного алгоритму 4 - підібрати такі вагові коефіцієнти нейронної мережі, які мінімізують помилку на її виході. Процедура оптимізації нейронної мережі за допомогою генетичного алгоритму є ітераційною та включає два етапи: синтез нових хромосом (схрещування і мутація); відбір хромосом в нову популяцію. Процес продовжується доти, поки буде виконана одна із умов: a - оптимальне рішення; b задана кількість поколінь. При цьому враховується ціль еволюції популяції, тобто кожна наступна популяція повинна бути кращою за попередню. Розв'язку задачі відповідає хромосома з мінімальним значенням функції належності, що визначає оптимальний вектор вагових коефіцієнтів Wi . При цьому похибка навчання менша заданої величини min . Якщо зупинка xн 45 50 55 1 UA 92971 U алгоритму за умовою a не може бути виконана, то відбувається завершення процедури за варіантом b із вибором найкращої хромосоми в одному або декількох поколіннях. Набір вагових коефіцієнтів із нейронної мережі w0 передається на оптимізацію до блока генетичного алгоритму 4 нм , а отримані у ньому значення вагових коефіцієнтів w1 надходять 5 10 на перевірку до блока нейромережевого прогнозування 3 (гнм ) . Глибину нейромережевого прогнозування для біологічних об'єктів доцільно брати не більше 15-20 годин. Прогнозоване значення природного збурення ( Zp ) передається в блок прийняття рішень 5, де для кожного прогнозу зберігаються можливі варіанти дій управління й показники якості (Bб ) для кожної дії за продуктивністю виробництва, матеріальними та енергетичними витратами у фізичних одиницях. У блок прийняття рішень 5 вводяться дані вартості складових прибутку C, з урахуванням яких методами теорії ігор і статистичних рішень здійснюється вибір стратегії управління Up . 15 20 За допомогою блока управління 6 проводиться зміна заданої дії Uза або зміна оптимальної - для нового способу стратегії управління Ucm у локальному автоматичному управляючому пристрої 8. Доповнення підсистеми прийняття рішень блоком оптимізації нейронної мережі системи управління біотехнічними об'єктами, дозволить розширити перелік ефективно опрацьовуваних природних збурень та забезпечити найбільший прибуток від реалізації виробленої продукції при мінімізації енерго- та ресурсовитрат, з можливістю якісного функціонування в умовах надзвичайних ситуацій. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 Система управління біотехнічними об'єктами, що включає локальну систему управління та підсистему прийняття рішень, яка відрізняється тим, що підсистема прийняття рішень додатково містить блок оптимізації нейронної мережі на основі використання генетичного алгоритму. 30 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюLysenko Vitalii Pylypovych, Zaets Natalia Anatoliivna
Автори російськоюЛысенко Виталий Филиппович, Заец Наталия Анатолиевна
МПК / Мітки
МПК: G05B 13/00
Мітки: система, управління, об'єктами, біотехнічними
Код посилання
<a href="https://ua.patents.su/4-92971-sistema-upravlinnya-biotekhnichnimi-obehktami.html" target="_blank" rel="follow" title="База патентів України">Система управління біотехнічними об’єктами</a>
Система управління біотехнічними об’єктами
Номер патенту: 86252
Опубліковано: 25.12.2013
Автори: Штепа Володимир Миколайович, Дудник Алла Олексіївна, Заєць Наталія Анатоліївна, Лисенко Віталій Пилипович
МПК: G05B 13/00
Мітки: об'єктами, управління, біотехнічними, система
Формула / Реферат:
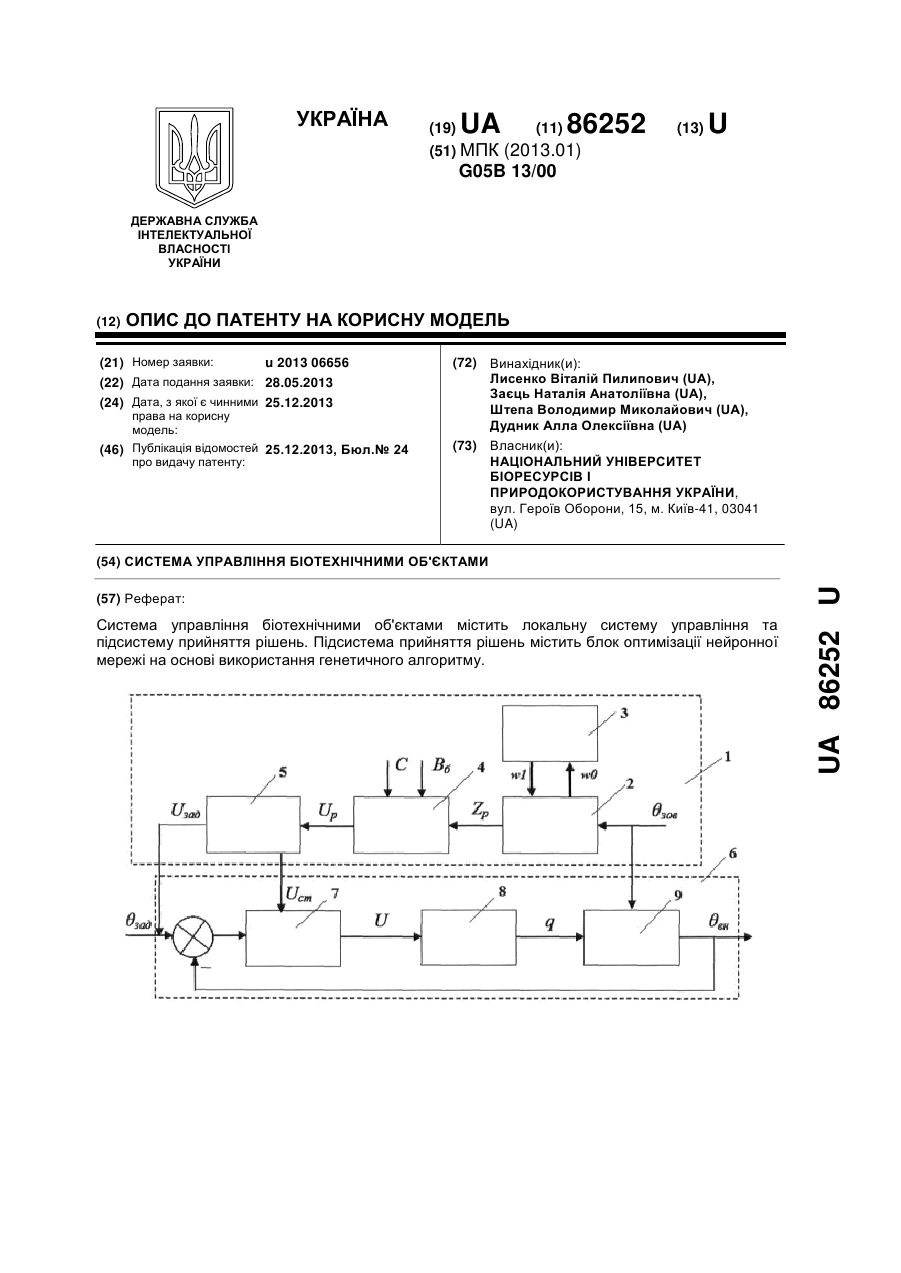
Система управління біотехнічними об'єктами, що містить локальну систему управління та підсистему прийняття рішень, яка відрізняється тим, що підсистема прийняття рішень містить блок оптимізації нейронної мережі на основі використання генетичного алгоритму.
Система управління біотехнічними об’єктами
Номер патенту: 85587
Опубліковано: 25.11.2013
Автори: Лисенко Віталій Пилипович, Решетюк Володимир Михайлович, Штепа Володимир Миколайович
МПК: G05B 13/00
Мітки: управління, система, об'єктами, біотехнічними
Формула / Реферат:
Система управління біотехнічними об'єктами, що містить локальну систему управління та підсистему прийняття рішень, яка відрізняється тим, що підсистема прийняття рішень містить блок фільтрації вхідного сигналу із можливістю формування адаптивного базису.
Система управління процесом утримання біологічних об’єктів
Номер патенту: 76175
Опубліковано: 25.12.2012
Автори: Заєць Наталія Анатоліївна, Дудник Алла Олексіївна, Штепа Володимир Миколайович, Лисенко Віталій Пилипович, Болбот Ігор Михайлович
МПК: G05B 13/00
Мітки: утримання, процесом, система, біологічних, об'єктів, управління
Формула / Реферат:
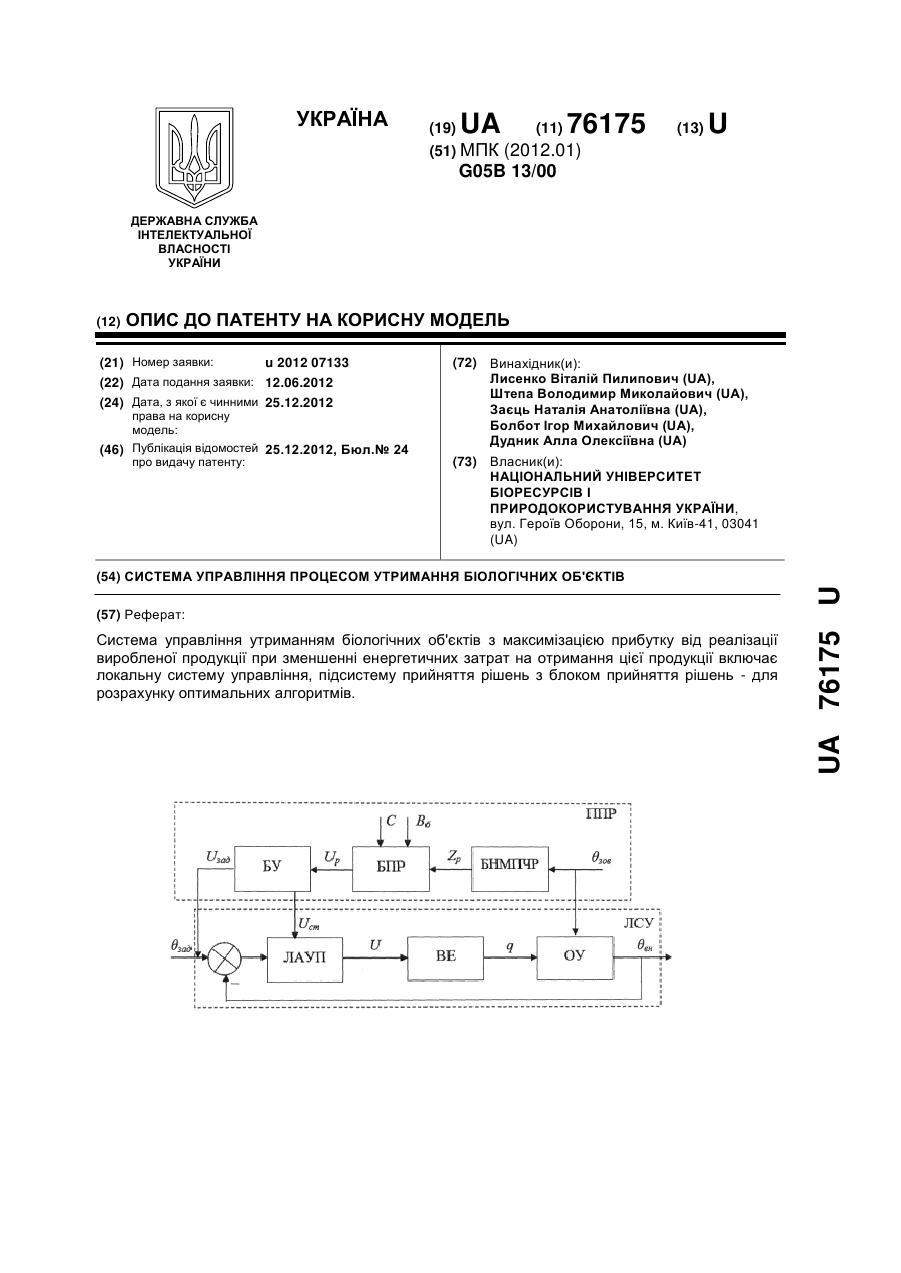
Система управління утриманням біологічних об'єктів з максимізацією прибутку від реалізації виробленої продукції при зменшенні енергетичних затрат на отримання цієї продукції, що включає локальну систему управління та підсистему прийняття рішень, з блоком прийняття рішень - для розрахунку оптимальних алгоритмів при утриманні біологічних об'єктів, яка відрізняється тим, що підсистема прийняття рішень містить блок нейромережевого прогнозування...
Система управління процесом утримання біологічних об’єктів
Номер патенту: 76177
Опубліковано: 25.12.2012
Автори: Штепа Володимир Миколайович, Щербатюк Вадим Леонідович, Лисенко Віталій Пилипович, Голуб Белла Львівна
МПК: G05B 13/00
Мітки: управління, утримання, система, біологічних, процесом, об'єктів
Формула / Реферат:
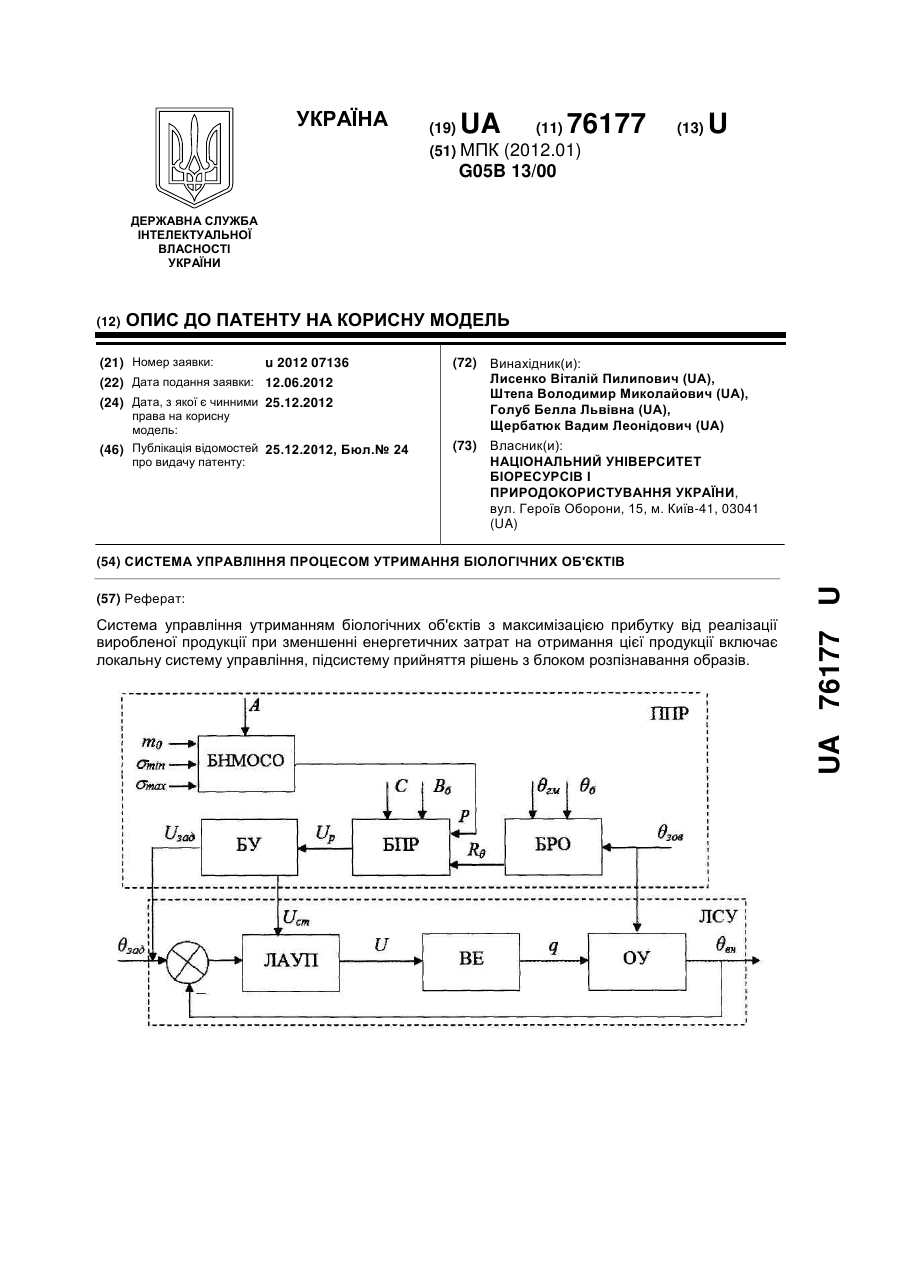
Система управління утриманням біологічних об'єктів з максимізацією прибутку від реалізації виробленої продукції при зменшенні енергетичних затрат на отримання цієї продукції, що включає локальну систему управління та підсистему прийняття рішень, з блоком розпізнавання образів, який здійснює прогнозування збурень на технологічний об'єкт, що мають характер стохастичних невизначеностей, та блок прийняття рішень - для розрахунку оптимальних...
Система управління випарною установкою
Номер патенту: 70552
Опубліковано: 15.10.2004
Автори: Луцька Наталія Миколаївна, Ладанюк Анатолій Петрович
Мітки: установкою, випарною, управління, система
Формула / Реферат:
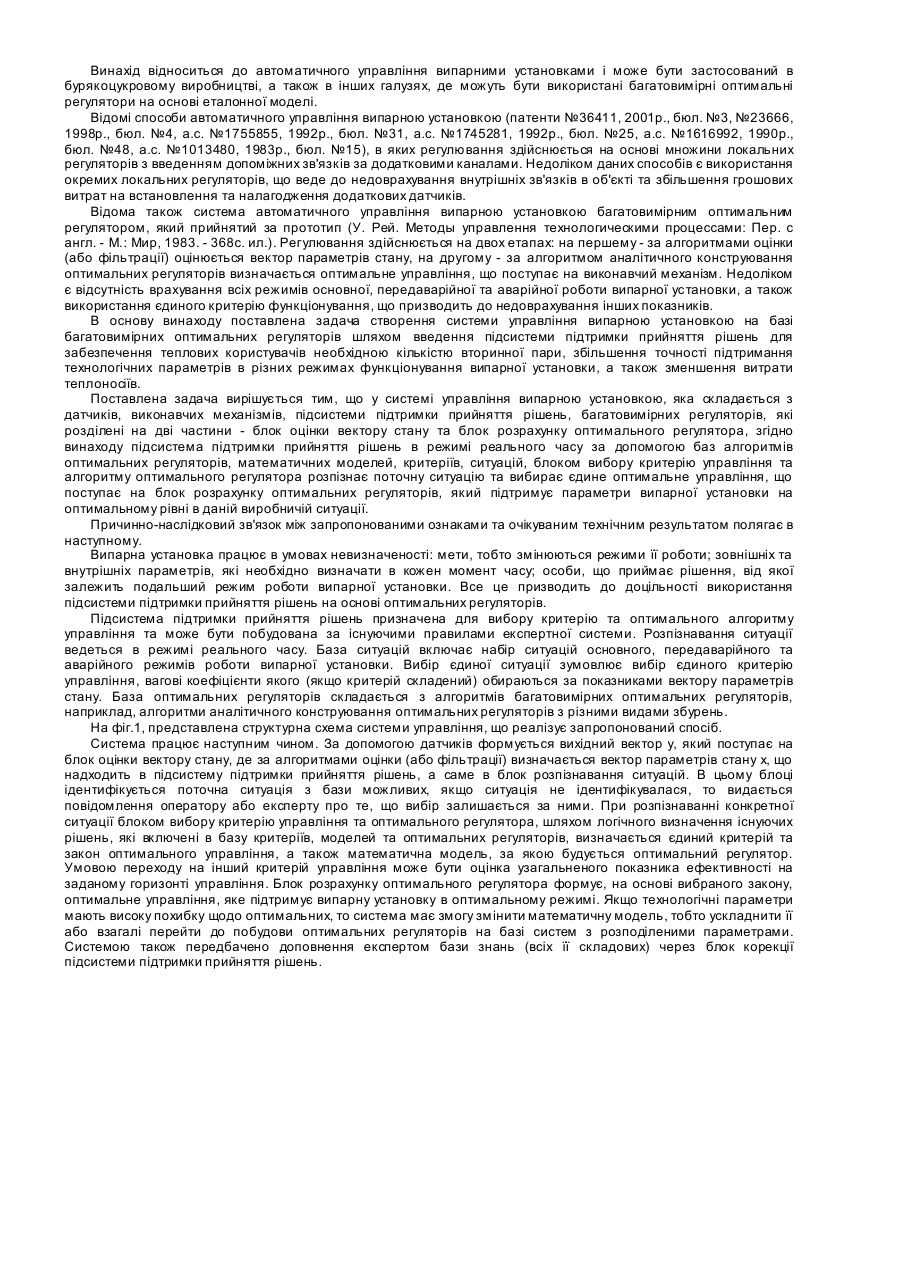
Система управління випарною установкою, що складається з датчиків, виконавчих механізмів, підсистеми підтримки прийняття рішень, багатовимірних регуляторів, які розділені на дві частини - блок оцінки вектора стану та блок розрахунку оптимального регулятора, яка відрізняється тим, що підсистема підтримки прийняття рішень в режимі реального часу за допомогою баз алгоритмів оптимальних регуляторів, математичних моделей, критеріїв, ситуацій,...
Попередній патент: Прилад ввр-1 для визначення віку риб
Наступний патент: Спосіб одержання подвійного оксоортофосфату літію-титану (iv)
Випадковий патент: Спосіб диференційної діагностики реципрокних атріовентрикулярних вузлової та ортодромної тахікардій