Спосіб визначення параметрів системи перетворювач частоти – асинхронний двигун
Номер патенту: 93737
Опубліковано: 10.03.2011
Автори: Воробейчик Олег Станіславович, Мельников Вячеслав Олександрович, Родькін Дмитро Йосипович, Калінов Андрій Петрович

Формула / Реферат
Спосіб визначення параметрів системи перетворювач частоти - асинхронний двигун, який полягає у тому, що асинхронний двигун через блок вимірювальних датчиків підключають до перетворювача частоти з широтно-імпульсною модуляцією, вимірюють сигнали напруг та струмів, розв'язують систему лінійних алгебраїчних рівнянь для дійсної та уявної складової повного комплексного опору обмоток, знаходять електромагнітні параметри схеми заміщення асинхронного двигуна, який відрізняється тим, що перед вимірювальними датчиками встановлюють низькочастотні фільтри 4-го порядку, вимірюють сигнали струмів та напруг, які піддаються корекції на основі значень загасання амплітуд гармонік і фазового зрушення на гармоніках за відомими передатними функціями низькочастотних фільтрів, розраховують початкові наближення шляхом аналізу перших гармонік струму та напруг у режимах короткого замикання, при частоті мережі живлення 50-60 Гц для визначення параметрів обмоток, та неробочого ходу, при частоті 5-10 Гц для визначення індуктивності контуру намагнічування, застосовують ітераційний спосіб визначення параметрів, за яким визначені параметри виступають як початкові наближення, рішення яких завершується при досягненні заданої точності показника, що відображає відтворення експериментальної кривої струму за розрахованими параметрами.
Текст
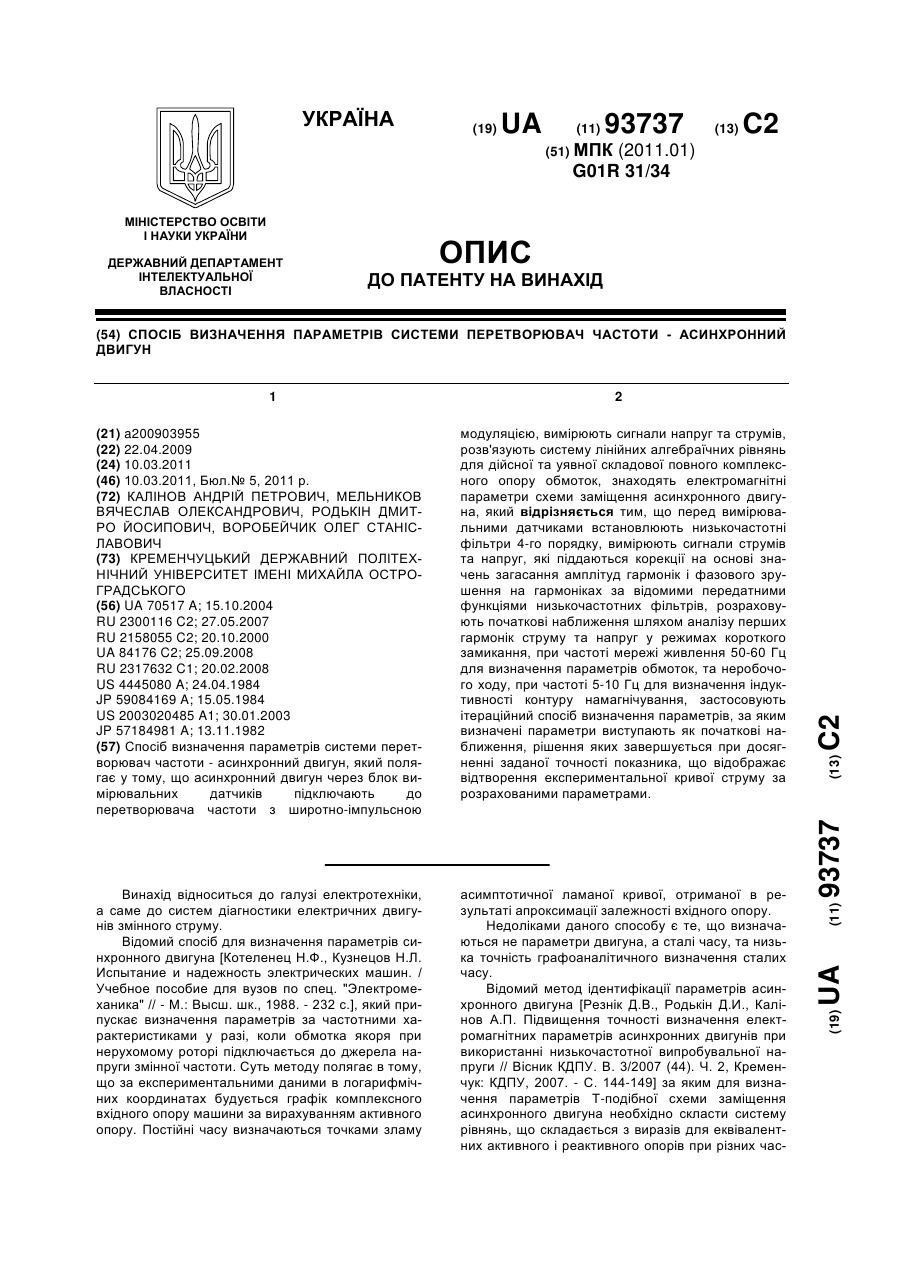
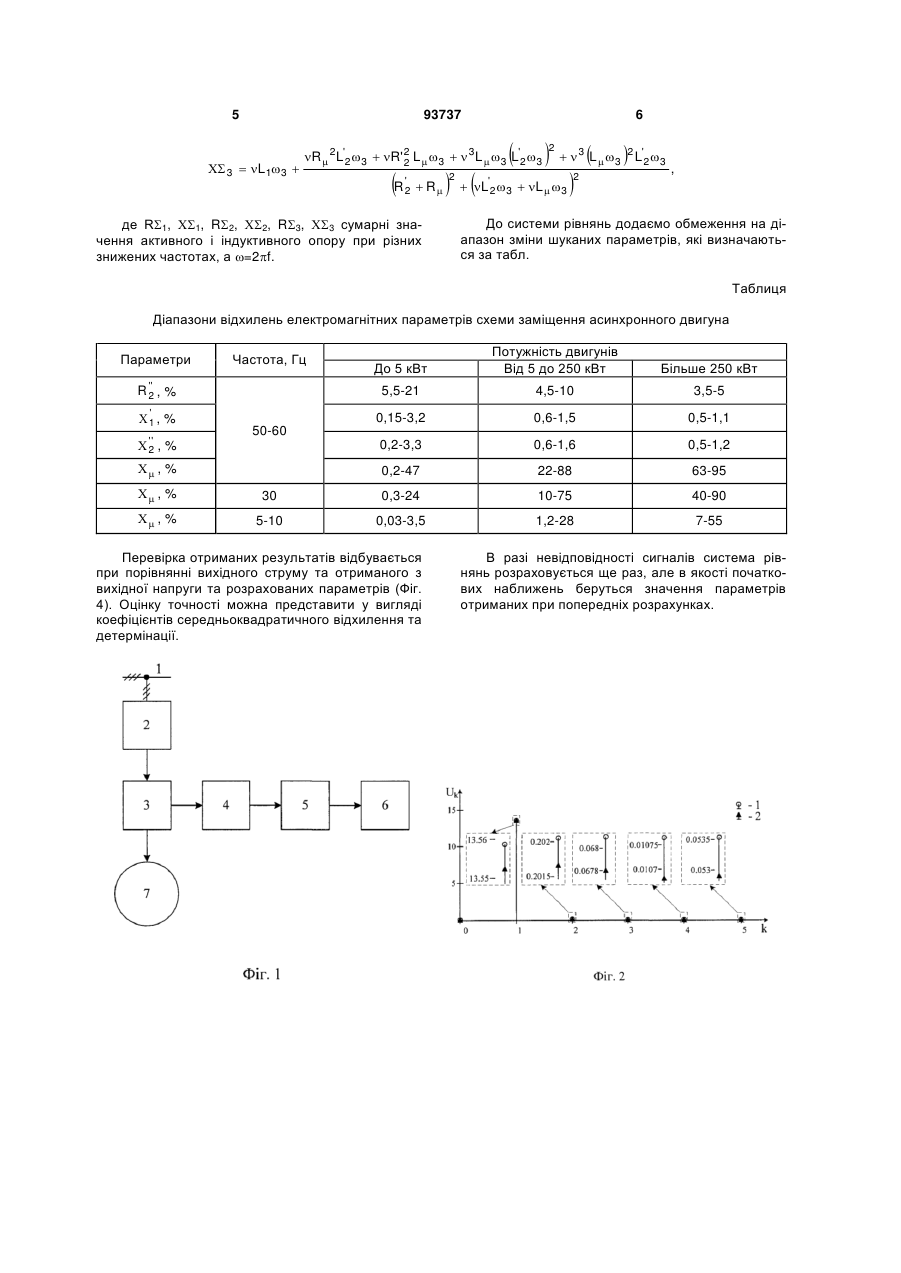
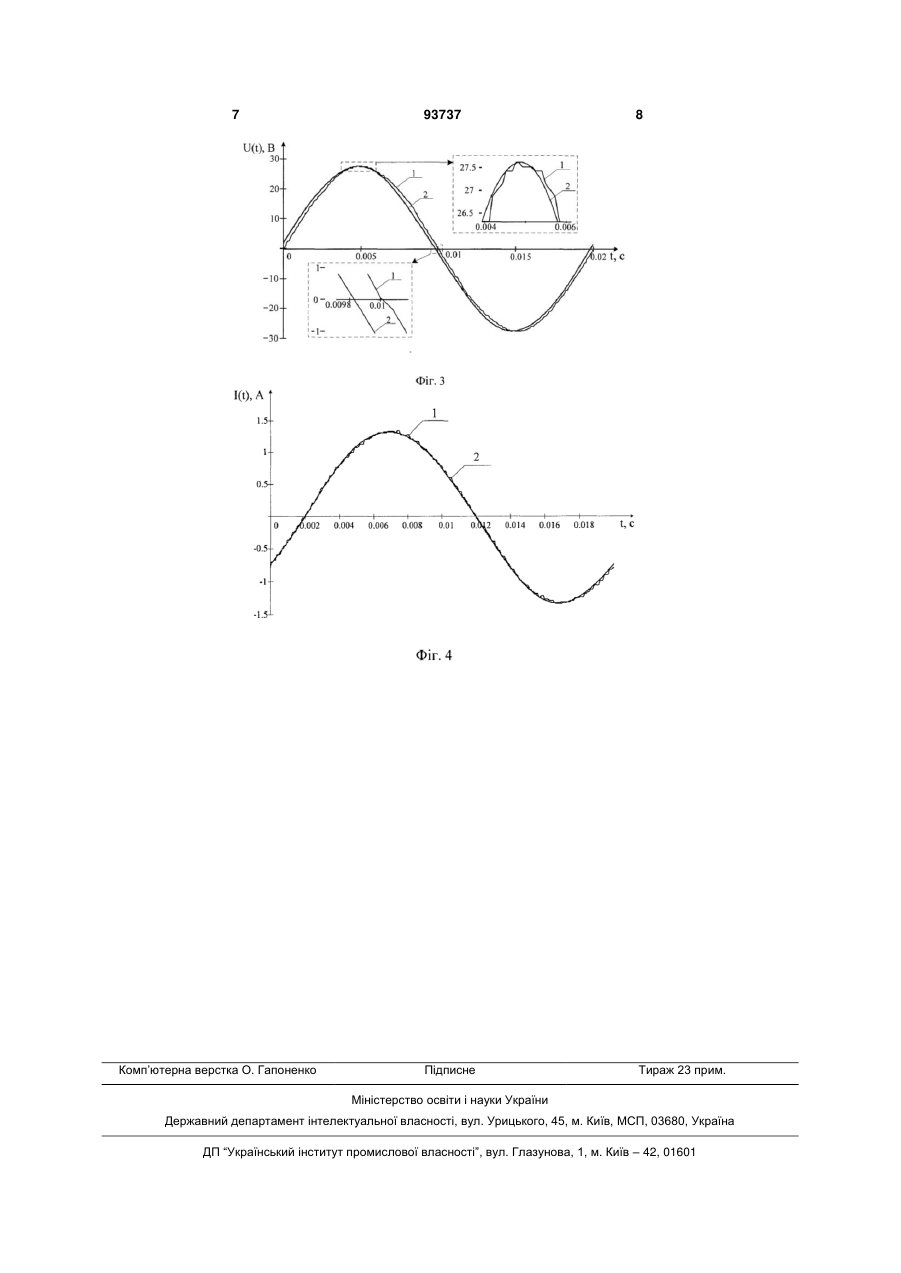
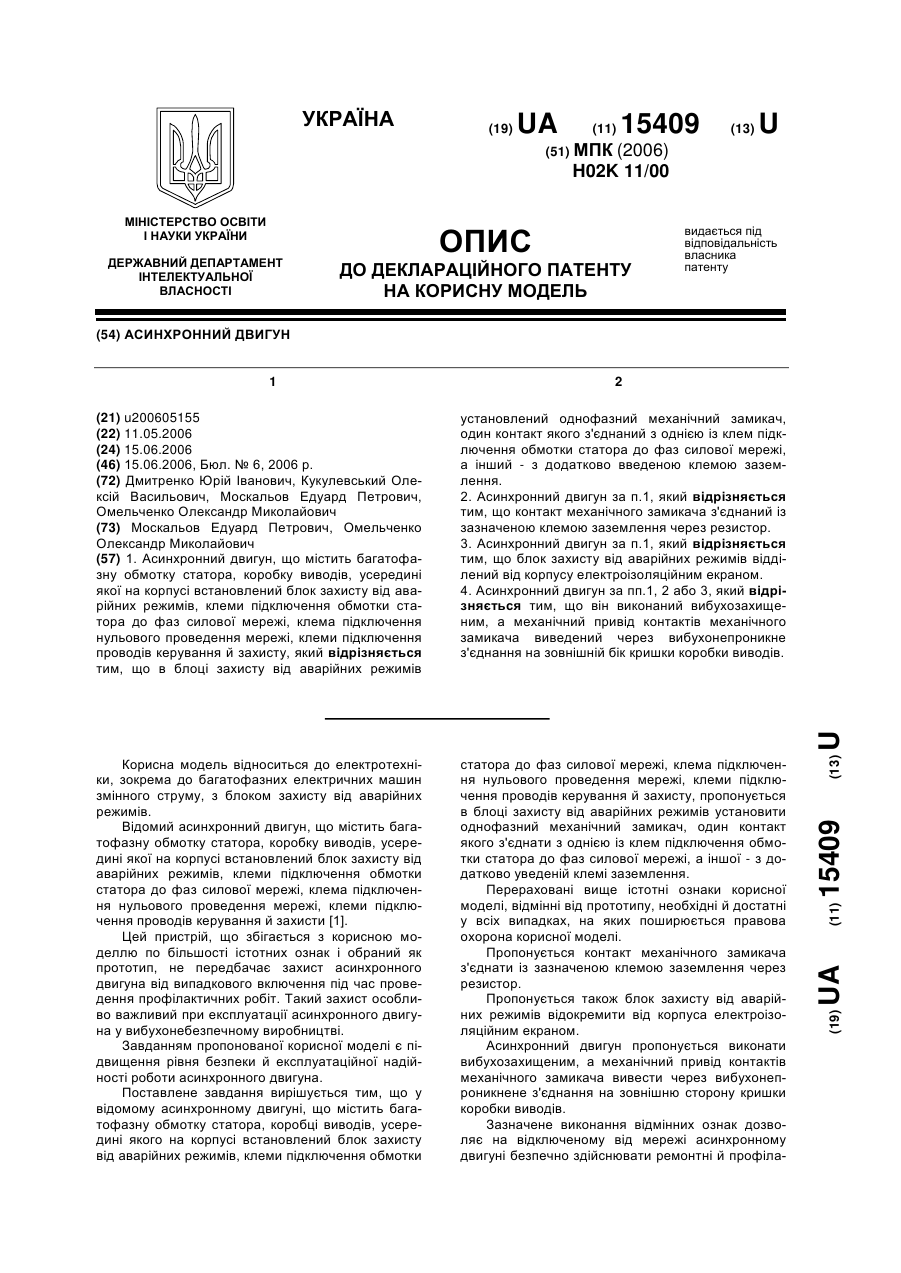
Спосіб визначення параметрів системи перетворювач частоти - асинхронний двигун, який полягає у тому, що асинхронний двигун через блок вимірювальних датчиків підключають до перетворювача частоти з широтно-імпульсною C2 2 (19) 1 3 93737 тотах живлячої напруги. Кількість рівнянь в системі відповідає кількості невідомих. При цьому необхідно вибирати частоти в області, де існує значна зміна еквівалентних активного і реактивного опорів, тобто в області низьких частот. Недоліком даного методу є те, що деякі параметри визначаються за характерними ділянками кривих залежності параметрів від частоти, що потребує проведення великої кількості експериментів для побудови цих кривих. Наведене технічне рішення прийняте за прототип. Метою винаходу є розробка способу визначення параметрів асинхронного двигуна, який дозволив би спростити математичний апарат ідентифікації та підвищити точність визначення параметрів для двигунів широкого спектру потужностей. Це досягається тим, що асинхронний двигун підключають до перетворювача частоти з широтно-імпульсною модуляцією, перед вимірювальними датчиками встановлюються фільтри нижніх частот, вимірюються сигнали напруг та струмів, розв'язується система лінійних алгебраїчних рівнянь для дійсної та уявної складової повного комплексного опору обмоток, знаходяться електромагнітні параметри схеми заміщення АД. Результати ідентифікації електромагнітних параметрів, окрім використання в частотнорегульованих електроприводах з векторним керуванням, можуть бути використані також в стаціонарних і мобільних системах діагностики і паспортизації асинхронних машин. Заявлений спосіб пояснюється наступними фігурами: на Фігурі 1 наведена схема підключення двигуна де прийняті позначення: 1 - мережа живлення, 2 - перетворювач частоти, 3 - блок датчиків, 4 - фільтр нижніх частот, 5 - аналогово-цифровий перетворювач, 6 - персональний комп'ютер, 7 асинхронний двигун; на Фігурі 2 наведена гармонійна складова напруги де прийняті позначення: 1 - вихідне значення, 2 - з врахуванням фільтру; на Фігурі 3 наведена корекція сигналу напруги де прийняті позначення: 1 - початкова міжфазна напруга, 2 - міжфазна напруга з урахуванням фільтру; на Фігурі 4 наведені криві струму де прийняті R1 R1 1 L11 позначення: 1 - крива вихідного струму, 2 - крива струму отриманого з вихідної напруги та розрахованих параметрів. Спосіб реалізується наступним чином. При встановленні фільтру низьких частот перед вимірювальним датчиком (Фіг. 1) з подальшою цифровою корекцією отримуємо сигнали струму і напруги. Використовуваний фільтр вносить амплітудні і фазні спотворення. На основі значень загасання амплітуд гармонік і фазового зрушення на гармоніках, що вносяться фільтрами, проводиться корекція зміряних сигналів напруги (Фіг. 2, Фіг. 3) та струму. Відфільтровані сигнали розкладаємо в ряд Фур'є. Користуючись лише значеннями перших гармонік отримуємо сумарний опір двигуна, в якому дійсна частина представляє собою активний опір, а уявна частина індуктивний опір. Для визначення параметрів двигуна необхідно задатися початковими значеннями параметрів схеми заміщення. В більшості випадків значення R1 відомо, виходячи з цього, приймемо, що R '2 R R1 , де R - сумарний активний опір при частоті живлячої мережі 50 Гц. Індуктивний опір статора приймемо як , де - сумарний індуктивний опір при 1 2 частоті живлячої мережі 50 Гц, а індуктивний опір ротора рівний '2 1 c , де с, в залежності від типу машини, змінюється в межах 1.011.05. Сумарні активні і індуктивні опори, в даному випадку, розраховуються з сигналу струму і напруги випробовуваного двигуна при нерухомому роторі. Щоб задати індуктивний опір контура намагнічення скористаємося значенням уявної частини опору отриманого з сигналу струму і напруги при неробочому ході двигуна - =-1. Задавшись початковими умовами, складається систему рівнянь ідентифікації параметрів. Для кожної гармоніки можна скласти по два рівняння для дійсної та уявної частини. R ' 2 R R L L 2 2 ' 2 1 ' 2 R L 2 ' 2 1 2 ' 2 2 ' 2 2 2 L 1 2 ' 2 2 2 R ' 2 R L 2 ' 2 2 2 R R '2 R '2R 2 2R L'2 3 R ' 2 R L 2 ' 2 3 2 2 2 2 2 2R '2 L 3 2 ; 2 ; 3R' 2 L 2 2 L'2 2 L 2 L 3 3R' 2 L 1 2 L'2 1 R L R R L L 2 RR'2 R'2R2 2R L'2 2 ; 1 R 2L'2 2 R' 2 L 2 3L 1 L'2 2 2 R 3 R1 2 2 RR'2 R' R 2R L'2 12 2R'2 L 1 2 R 2L'2 1 R' 2 L 1 3L 1 L'2 1 2 R2 R1 2 L12 4 2 ; ; 5 93737 3 L13 6 R 2L'2 3 R' 2 L 3 3L 3 L'2 3 2 R ' 2 R де R1, 1, R2, 2, R3, 3 сумарні значення активного і індуктивного опору при різних знижених частотах, а =2f. L 2 ' 2 3 2 3 L 3 2 L'2 3 L 3 2 , До системи рівнянь додаємо обмеження на діапазон зміни шуканих параметрів, які визначаються за табл. Таблиця Діапазони відхилень електромагнітних параметрів схеми заміщення асинхронного двигуна Параметри ' R '2 , % ' '2 , % Більше 250 кВт 4,5-10 3,5-5 0,15-3,2 0,6-1,5 0,5-1,1 0,6-1,6 0,5-1,2 0,2-47 , % Потужність двигунів Від 5 до 250 кВт 0,2-3,3 50-60 До 5 кВт 5,5-21 % ' 1 , Частота, Гц 22-88 63-95 , % 30 0,3-24 10-75 40-90 , % 5-10 0,03-3,5 1,2-28 7-55 Перевірка отриманих результатів відбувається при порівнянні вихідного струму та отриманого з вихідної напруги та розрахованих параметрів (Фіг. 4). Оцінку точності можна представити у вигляді коефіцієнтів середньоквадратичного відхилення та детермінації. В разі невідповідності сигналів система рівнянь розраховується ще раз, але в якості початкових наближень беруться значення параметрів отриманих при попередніх розрахунках. 7 Комп’ютерна верстка О. Гапоненко 93737 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of parameters of system frequency transformer asynchronous motor
Автори англійськоюKalinov Andrii Petrovych, Melnykov Viacheslav Oleksandrovych, Rodkin Dmytro Yosypovych, Vorobeichyk Oleh Stanislavovych
Назва патенту російськоюСпособ определения параметров системы преобразователь частоты - асинхронный двигатель
Автори російськоюКалинов Андрей Петрович, Мельников Вячеслав Александрович, Родькин Дмитрий Иосифович, Воробейчик Олег Станиславович
МПК / Мітки
МПК: G01R 31/34
Мітки: перетворювач, системі, визначення, двигун, спосіб, частоти, параметрів, асинхронний
Код посилання
<a href="https://ua.patents.su/4-93737-sposib-viznachennya-parametriv-sistemi-peretvoryuvach-chastoti-asinkhronnijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів системи перетворювач частоти – асинхронний двигун</a>
Асинхронний двигун
Номер патенту: 15409
Опубліковано: 15.06.2006
Автори: Москальов Едуард Петрович, Дмитренко Юрій Іванович, Омельченко Олександр Миколайович, Кукулевський Олексій Васильович
МПК: H02K 11/00
Мітки: асинхронний, двигун
Формула / Реферат:
1. Асинхронний двигун, що містить багатофазну обмотку статора, коробку виводів, усередині якої на корпусі встановлений блок захисту від аварійних режимів, клеми підключення обмотки статора до фаз силової мережі, клема підключення нульового проведення мережі, клеми підключення проводів керування й захисту, який відрізняється тим, що в блоці захисту від аварійних режимів установлений однофазний механічний замикач, один контакт якого з'єднаний з...
Спосіб визначення електромагнітних параметрів машин змінного струму
Номер патенту: 51956
Опубліковано: 10.08.2010
Автори: Рєзнік Дмитро Володимирович, Воробейчик Олег Станіславович, Калінов Андрій Петрович
МПК: G01R 27/28
Мітки: спосіб, змінного, визначення, параметрів, струму, машин, електромагнітних
Формула / Реферат:
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення ( - номінальне сковзання,
Асинхронний двигун
Номер патенту: 30906
Опубліковано: 15.12.2000
Автори: Чуєнко Микола Онисимович, Мішин Володимир Іванович, Чуєнко Роман Миколайович, Тарасенко Ростислав Олександрович
МПК: H02K 17/34
Мітки: асинхронний, двигун
Формула / Реферат:
Асинхронний двигун, який має короткозамкнений ротор, трифазну статорну обмотку, який відрізняється тим, що кожну фазну обмотку статора виконують з двох паралельних віток, які мають різні числа витків, а у вітку з більшим числом витків включають конденсатор поздовжньої ємнісної компенсації.
Спосіб визначення електромагнітних параметрів машин змінного струму
Номер патенту: 43931
Опубліковано: 10.09.2009
Автори: Воробейчик Олег Станіславович, Рєзнік Олена Анатоліївна, Рєзнік Дмитро Володимирович, Калінов Андрій Петрович, Родькін Дмитро Йосипович
МПК: G01R 27/28
Мітки: струму, змінного, спосіб, визначення, машин, електромагнітних, параметрів
Формула / Реферат:
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення, задають ряд значень напруги та частоти на виході джерела живлення, знімають показання напруги та струму, визначають повний та еквівалентні активний і реактивний опір схеми заміщення асинхронного...
Асинхронний двигун

Номер патенту: 36490
Опубліковано: 27.10.2008
Автори: Макаров Констянтин Дмитрійович, Шейко Валентина Григорівна, Кукулевський Олексій Васильович
МПК: H02K 17/12, H02K 17/02, H02K 3/18
Мітки: асинхронний, двигун
Формула / Реферат:
1. Асинхронний двигун, що містить шихтований статор, з розміщеною у ньому жорсткою обмоткою, і короткозамкнутий ротор, який відрізняється тим, що діаметр розточування (Др) статора визначається із співвідношення:Др = 0,53•Да•р0,275,де Да - зовнішній діаметр заліза статора; р - число пар полюсів.2. Асинхронний двигун за п. 1, який відрізняється тим, що площа паза (Sn) для мідного стержня ротора складає (0,0028-0,0029)Др2,...
Попередній патент: Проекційний лазерний кінескоп
Наступний патент: Шпалерний матеріал і спосіб його виготовлення
Випадковий патент: Спосіб визначення обсягу резекції портальної вени при панкреатодуоденальній резекції