Цифровий вимірювач кутової швидкості
Номер патенту: 95149
Опубліковано: 11.07.2011
Автори: Кондратов Владислав Тимофійович, Сенчевська Наталія Вікторівна
Формула / Реферат
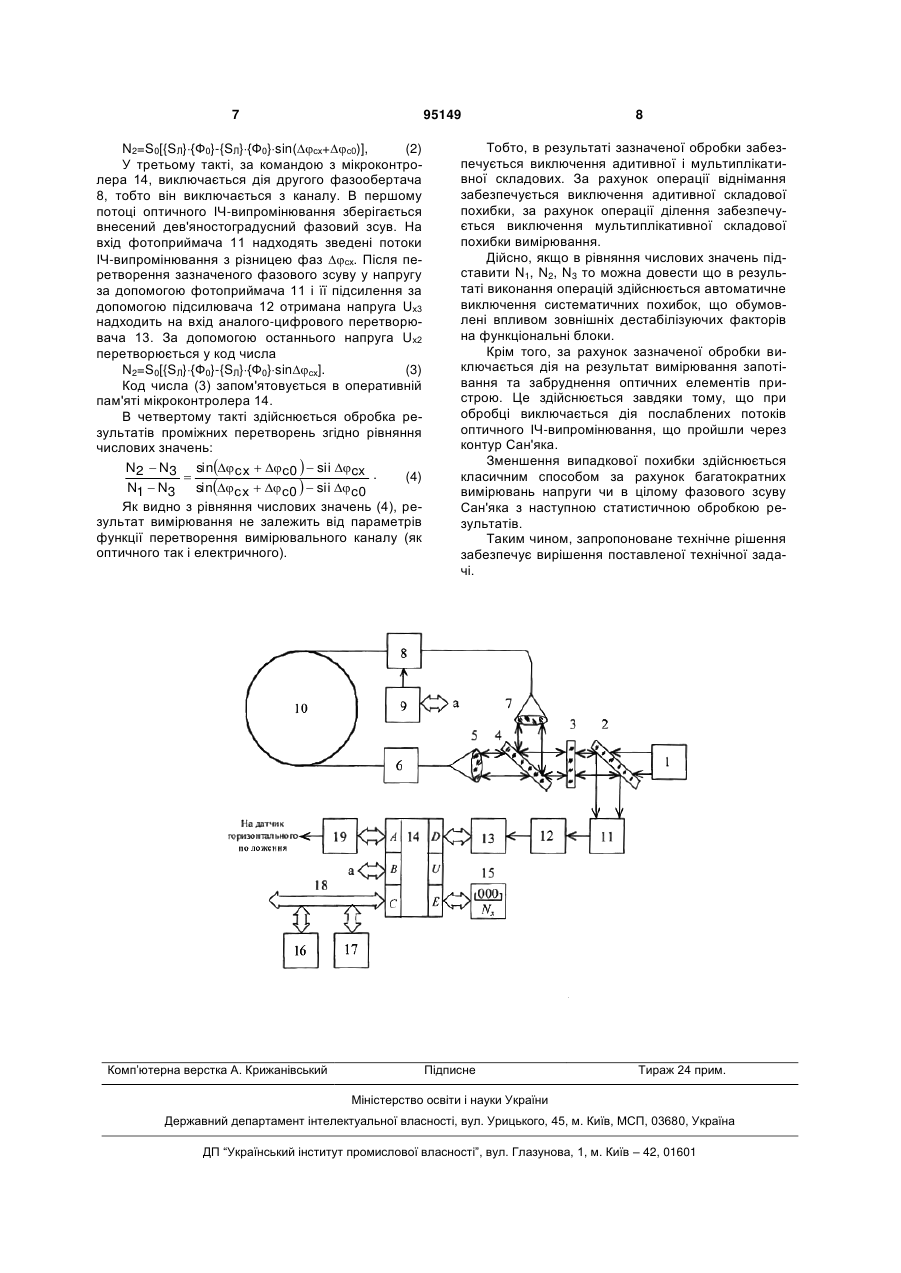
Цифровий вимірювач кутової швидкості, що включає мікроконтролер, оперативний запам'ятовуючий пристрій та постійний запам'ятовуючий пристрій, які через загальну шину з'єднані з портом С мікроконтролера, порт Е якого підключений до цифрового відлікового пристрою, а також оптично з'єднані між собою джерело оптичного випромінювання, першу світлоподільну пластину, поляризатор, другу світлоподільну пластину, фокусуючу лінзу, дев'яностоградусний фазообертач, волоконно-оптичний контур Сан'яка і другу фокусуючу лінзу, вихід якої оптично з'єднаний через другу світлоподільну пластину, поляризатор і першу світлоподільну пластину зі входом фотоприймача, вихід якого підключений до входу аналогово-цифрового перетворювача через підсилювач, який відрізняється тим, що додатково введені інтерфейс зв'язку з датчиком горизонтального положення рухомого об'єкта, кодокероване джерело напруги живлення та додатковий фазообертач, вхід якого підключений до виходу волоконно-оптичного контуру Сан'яка, а вихід з'єднаний зі входом другої фокусуючої лінзи, при цьому вхід керування додаткового фазообертача підключений до виходу кодокерованого джерела живлення, вхід керування якого з'єднаний з портом В мікроконтролера, порт А якого підключений до виходу інтерфейсу зв'язку з датчиком горизонтального положення, а порт D - до виходів аналого-цифрового перетворювача.
Текст
Цифровий вимірювач кутової швидкості, що включає мікроконтролер, оперативний запам'ятовуючий пристрій та постійний запам'ятовуючий пристрій, які через загальну шину з'єднані з портом С мікроконтролера, порт Е якого підключений до цифрового відлікового пристрою, а також опти C2 2 (19) 1 3 вими модуляторами допоміжної і компенсаційної модуляції відповідно. До недоліків відомого вимірювача кутової швидкості слід віднести належність двох фотоприймачів та фазових модуляторів з неідентичними характеристиками, нестабільність функціональних блоків вимірювача до дії зовнішніх дестабілізуючих факторів, таких як температура, тиск тощо. Крім того, на результат вимірювання впливають забруднення та запотіванням оптичних елементів. Вказані недоліки знижують точність вимірювання кутової швидкості. Відомий цифровий пристрій вимірювання кутової швидкості об'єкта [див. А.Г. Шереметьев. Волоконно-оптический гироскоп М: Радіо і зв'язок, 1987], що включає в себе мікроконтролер, оперативний запам'ятовуючий пристрій та постійний запам'ятовуючий пристрій, які через загальну шину з'єднані з портом С мікроконтролера, порт Е якого підключений до цифрового відлікового пристрою, оптично з'єднані між собою джерело оптичного випромінювання, першу світлоподільну пластину, поляризатор, другу світлоподільну пластину, фокусуючу лінзу, дев'яностоградусний фазообертач, волоконно-оптичний контур Сан'яка і другу фокусуючу лінзу, вихід якої оптично з'єднаний через другу світлоподільну пластину, поляризатор і першу світлоподільну пластину зі входом фотоприймача, вихід якого підключений до входу аналогово-цифрового перетворювача через підсилювач. Головним недоліком відомого вимірювача є нестабільність функціональних блоків та їх характеристик в умовах дії дестабілізуючих факторів, зокрема при змінах навколишньої температури в широких межах - до ± 60 °C. Це веде до великих навігаційних похибок визначення місцезнаходження об'єкта. Особливо це помітно при впливі повільних температурних градієнтів, що впливають на довготривалий дрейф нуля вимірювального каналу. Відомий пристрій не забезпечує також виключення похибки вимірювання, що обумовлена забрудненням та запотіванням оптичних елементів. Все це заважає високоточним вимірюванням кутової швидкості. Найбільш близьким до запропонованого є цифровий волоконно-оптичний вимірювач кутової швидкості [див. патент на винахід № 2139499 кл. G 01С 19/72 (Россия), публ. 10.10.1999 г. Логозинский В.М, Соломатин В.О., Волоконно-оптический гироскоп], який включає в себе послідовно розташовані і з'єднані оптичним волокном модуль випромінювання, перший відгалужувач, поляризатор, другий відгалужувач, волоконний контур, фазовий модулятор и фото-приймальний модуль, а також включає в собі два перетворювачі однієї поляризаційної моди волокна в іншу, що виконані у вигляді тонких закручених і зафіксованих в цьому положенні ділянок волокна, фазовий модулятор виконаний у вигляді вільної петлі волокна, вхідний і вихідний відрізки якої зафіксовані на поверхні п'єзокерамічного елемента у вигляді двох паралельних волокон однієї довжини. Один перетворювач поляризаційної моди волокна розташований у волоконному контурі, а другий перетворювач розташований у вільній петлі фазового модулятора. 95149 4 Недоліком прототипу є залежність параметрів функції перетворення вимірювального каналу від дії зовнішніх дестабілізуючих факторів, зокрема навколишньої температури. Використання відгалужувачів з неідентичними характеристиками призводить до додаткових похибок вимірювання. Відомий пристрій не забезпечує виключення похибки вимірювання, що обумовлена забрудненням та запотіванням оптичних елементів. Все це знижує точність вимірювання кутової швидкості. Поставлена технічна задача в створенні такого цифрового вимірювача кутової швидкості рухомого об'єкта за ефектом Сан'яка, який би забезпечував виключення адитивної і мультиплікативної складових систематичних похибок вимірювального каналу, а також виключення дії на результат вимірювання забруднення та запотівання оптичних елементів. Поставлена технічна задача вирішується тим, що пристрій для вимірювання кутової швидкості, що включає в себе мікроконтролер, оперативний запам'ятовуючий пристрій та постійний запам'ятовуючий пристрій, які через загальну шину з'єднані з портом С мікроконтролера, порт Е якого підключений до цифрового відлікового пристрою, а також оптично з'єднані між собою джерело оптичного випромінювання, першу світлоподільну пластину, поляризатор, другу світлоподільну пластину, фокусуючу лінзу, дев'яностоградусний фазообертач, волоконно-оптичний контур Сан'яка і другу фокусуючу лінзу, вихід якої оптично з'єднаний через другу світлоподільну пластину, поляризатор і першу світлоподільну пластину зі входом фотоприймача, вихід якого підключений до входу аналогово-цифрового перетворювача через підсилювач, від відомого відрізняється тим, що додатково введені інтерфейс зв'язку з датчиком горизонтального положення рухомого об'єкта, кодокероване джерело напруги живлення та додатковий фазообертач, вхід якого підключений до виходу волоконнооптичного контуру Сан'яка, вихід з'єднаний зі входом другої фокусуючої лінзи, вхід керування додаткового фазообертача підключений до виходу кодокерованого джерела живлення, чий вхід керування з'єднаний з портом В мікроконтролера, порт А якого підключений до виходу інтерфейсу зв'язку з датчиком горизонтального положення, а порт D - до виходів аналого-цифрового перетворювача. На фіг. представлена схема цифрового вимірювача кутової швидкості, де 1 - джерело оптичного випромінювання, 2, 4 - перша та друга світлоподільні пластини, 3 - поляризатор, 5, 7 фокусуючі лінзи, 6 - дев'яностоградусний фазообертач, 8 - другий фазообертач, 9 - кодокероване джерело напруги живлення, 10 - волоконний контур, 11 - фотоприймач, 12 - підсилювач сигналу, 13 - аналогово-цифровий перетворювач, 14 - мікроконтролер, 15 - цифровий відліковий пристрій, 16 постійно запам'ятовуючий пристрій, 17 - оперативно запам'ятовуючий пристрій, 18 - загальна шина, 19 - інтерфейс зв'язку з датчиком горизонтального положення. Розглянемо зв'язки між функціональними блоками цифрового пристрою у статиці. Пристрій для 5 вимірювання кутової швидкості включає в себе послідовно з'єднані між собою джерело оптичного випромінювання 1, світлоподільні пластини 2 та 4, поляризатор 3, дев'яностоградусний фазообертач 6, фокусуючу лінзу 5, волоконний контур Сан'яка 10, який розташований на платформі і другу фокусуючу лінзу 7. Один з боків фокусуючої лінзи 7 оптично з'єднаний з вхідною гранню другої світлоподільної пластини 4 і, через першу світлоподільну пластину 2, зі входом чутливого елемента фотоприймача 11. Вихід фотоприймача 11 через підсилювач 12 з'єднаний зі входом аналоговоцифрового перетворювача 13. Цифровий вимірювач включає також цифровий відліковий пристрій 15, загальну шину 18, оперативний запам'ятовуючий пристрій 16, постійний запам'ятовуючий пристрій 17 та мікроконтролер 14. Порт Е мікроконтролера 14 з'єднаний з входами-виходами цифрового відлікового пристрою 15, порт С підключений до входів-виходів оперативного запам'ятовуючого пристрою 16 та постійного запам'ятовуючого пристрою 17. Від відомих цифровий вимірювач відрізняється тим, що в нього додатково введені: послідовно з'єднані між собою додатковий фазообертач 8 та кодокероване джерело напруги живлення 9, цифровий вхід якого підключений до порту В мікроконтролера 14, на порт А якого надходить через інтерфейс зв'язку 19 сигнал з сенсора горизонтального положення. При цьому оптичний вхід-вихід додаткового фазообертача 8 з'єднаний з другою фокусуючою лінзою 7, а другий оптичний вхід-вихід додаткового фазообертача 8 підключений до волоконно-оптичного контуру Сан'яка. В основу методу вимірювання, що реалізує запропонований цифровий вимірювач кутової швидкості рухомого об'єкта покладено ефект Сан'яка. Його суть полягає в тому, що фазові набіги (фази Сан'яка) двох електромагнітних хвиль, що розповсюджуються по замкнутому волоконнооптичному контуру 10 незмінної конфігурації у зустрічних напрямках, залежать від величини та напрямку кутової швидкості обертання цього контуру. Вимірюючи різницю фаз Сан'яка, можна отримати інформацію про кутову швидкість обертання об'єкта, на якому закріплений вимірювач, а шляхом інтегрування швидкості - інформацію про кут повороту. Ця інформація потім використовується для вимірювання кутової швидкості або для стабілізації стану об'єкта та/або для керування його рухом. Як відомо напруга на виході фотоприймача описується рівнянням величин [див. А.Г. Шереметьев Волоконно-оптичний гіроскоп. -М: Радіо і зв'язок, 1987. - С 29-35]: Ux=SЛФ0-SЛФ0sinс, де SЛ - крутість перетворення потужності зведених потоків ІЧ-випромінювання у напругу. Суть роботи запропонованого цифрового вимірювача кутової швидкості складається з трьох тактів вимірювання і одного такту обчислення. Після включення пристрою всі блоки установлюються в початкове положення. Відліковий пристрій 15 показує нуль. Другий фазообертач 8 включений в оптичний канал. За допомогою джерела 1 формується потік оптичного ІЧ-вимпромінювання, який 95149 6 через першу світло-подільну пластинку 2 надходить на поляризатор 3. В результаті на виході поляризатора 3 формується лінійно-поляризований потік оптичного ІЧ-випромінювання. Цей потік через оптичні елементи 4, 5, 6, 10, 8 і 7 надходить через поляризатор 3 на першу світлоподільну пластину 2, відбивається від неї і надходить на вхід фотоприймача 11. Одночасно лінійнополяризований потік оптичного ІЧвипромінювання, що відбився від другої світлоподільної пластини 4, через оптичні елементи 7, 8, 10, 6, 5 і 4 також надходить через поляризатор 3 на першу світлоподільну пластину 2, відбивається від неї і також надходить на вхід фотоприймача 11. На вході обидва потоки оптичного ІЧвипромінювання створюють інтерференційну картину, яка змінюється в залежності від різниці фаз між цими потоками. Відповідно міняється напруга на виході фотоприймача 11. Після підсилення за допомогою підсилювача 12 ця напруга перетворюється у код відповідного числа та запам'ятовується у оперативній пам'яті мікроконтролера 14. В першому такті у напругу Ux1 перетворюється потужність зведеного потоку оптичного випромінювання за умови відсутності обертання ({x}=0, {сx}=0). Це відбувається у момент часу, коли рухомий об'єкт знаходиться в горизонтальному положенні. В цей момент часу на послідовний порт А мікроконтролера 14 через інтерфейс зв'язку 19 подається сигнал з виходу сенсора горизонтального положення, коли рухомий об'єкт знаходиться в горизонтальному положенні. При цьому в перший з потоків оптичного ІЧ-випромінювання за допомогою першого фазообертача 6 вноситься дев'яностоградусний фазовий зсув, а в другий з потоків оптичного ІЧ-випромінювання за допомогою другого фазообертача 8 вноситься нормований за значенням фазовий зсув с0. Фазовий зсув зведених потоків оптичного ІЧ-випромінювання перетворюється у напругу Ux1, а потім у код числа N1=S0[{SЛ}{Ф0}-{SЛ}{Ф0}sinс0], (1) де S0 - крутість аналого-цифрового перетворення за допомогою аналого-цифрового перетворювача 13. Код числа (1) заноситься у оперативну пам'ять мікроконтролера 14 в момент часу, коли об'єкт знаходиться в горизонтальному положенні, де й запам'ятовується. У другому такті в першому потоці оптичного ІЧвипромінювання зберігається внесений дев'яностоградусний фазовий зсув, а в другий потік знову вносять нормований за значенням фазовий зсув с0. Вимірювання здійснюється за наявності обертання об'єкта ({x}0). В результаті на фотоприймач 11 надходять обидва зведені потоки оптичного ІЧ-випромінювання з різницею фаз {с0}={сx}+{с0}. Після перетворення зазначеного фазового зсуву у напругу за допомогою фотоприймача 11 і її підсилення за допомогою підсилювача 12, напруга Uх2 надходить на вхід аналогоцифрового перетворювача 13. За допомогою аналогово-цифрового перетворювача 13 напруга Uх2 перетворюється у код числа, який запам'ятовується в оперативній пам'яті мікроконтролера 14. 7 95149 N2=S0[{SЛ}{Ф0}-{SЛ}{Ф0}sin(сx+с0)], (2) У третьому такті, за командою з мікроконтролера 14, виключається дія другого фазообертача 8, тобто він виключається з каналу. В першому потоці оптичного ІЧ-випромінювання зберігається внесений дев'яностоградусний фазовий зсув. На вхід фотоприймача 11 надходять зведені потоки ІЧ-випромінювання з різницею фаз сx. Після перетворення зазначеного фазового зсуву у напругу за допомогою фотоприймача 11 і її підсилення за допомогою підсилювача 12 отримана напруга Uх3 надходить на вхід аналого-цифрового перетворювача 13. За допомогою останнього напруга Uх2 перетворюється у код числа N2=S0[{SЛ}{Ф0}-{SЛ}{Ф0}sinсx]. (3) Код числа (3) запом'ятовується в оперативній пам'яті мікроконтролера 14. В четвертому такті здійснюється обробка результатів проміжних перетворень згідно рівняння числових значень: N2 N3 sinсх с0 sіі cx . (4) N1 N3 sinсх с0 sіі c0 Як видно з рівняння числових значень (4), результат вимірювання не залежить від параметрів функції перетворення вимірювального каналу (як оптичного так і електричного). Комп’ютерна верстка А. Крижанівський 8 Тобто, в результаті зазначеної обробки забезпечується виключення адитивної і мультиплікативної складових. За рахунок операції віднімання забезпечується виключення адитивної складової похибки, за рахунок операції ділення забезпечується виключення мультиплікативної складової похибки вимірювання. Дійсно, якщо в рівняння числових значень підставити N1, N2, N3 то можна довести що в результаті виконання операцій здійснюється автоматичне виключення систематичних похибок, що обумовлені впливом зовнішніх дестабілізуючих факторів на функціональні блоки. Крім того, за рахунок зазначеної обробки виключається дія на результат вимірювання запотівання та забруднення оптичних елементів пристрою. Це здійснюється завдяки тому, що при обробці виключається дія послаблених потоків оптичного ІЧ-випромінювання, що пройшли через контур Сан'яка. Зменшення випадкової похибки здійснюється класичним способом за рахунок багатократних вимірювань напруги чи в цілому фазового зсуву Сан'яка з наступною статистичною обробкою результатів. Таким чином, запропоноване технічне рішення забезпечує вирішення поставленої технічної задачі. Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital measuring device for angular rate
Автори англійськоюKondratov Vladyslav Tymofiiovych, Senchevska Natalia Viktorivna
Назва патенту російськоюЦифровой измеритель угловой скорости
Автори російськоюКондратов Владислав Тимофеевич, Сенчевская Наталия Викторовна
МПК / Мітки
МПК: G01C 19/72
Мітки: цифровий, швидкості, кутової, вимірювач
Код посилання
<a href="https://ua.patents.su/4-95149-cifrovijj-vimiryuvach-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Цифровий вимірювач кутової швидкості</a>
Вимірювач кутової швидкості

Номер патенту: 11983
Опубліковано: 16.01.2006
Автори: Зінченко Юрій Володимирович, Гордін Олександр Григорович
МПК: G01P 3/00, G01P 3/64, G01R 33/02
Мітки: швидкості, вимірювач, кутової
Формула / Реферат:
1. Вимірювач кутової швидкості, який містить датчики переміщення та електродвигун, на валу якого знаходиться плоский дископодібний ротор, який відрізняється тим, що плоский дископодібний ротор складається з окремих радіально розташованих сегментів.2. Вимірювач кутової швидкості за п. 1, який відрізняється тим, що як датчики переміщення використано датчики магнітного потоку трансформаторного типу.
Трикомпонентний вимірювач кутової швидкості
Номер патенту: 55300
Опубліковано: 15.03.2005
Автори: Кулік Анатолій Степанович, Бандура Іван Миколайович, Симонов Володимир Федорович, Субота Анатолій Максимович
МПК: G01P 9/00
Мітки: трикомпонентний, швидкості, вимірювач, кутової
Формула / Реферат:
1. Фруктовий наповнювач, який містить пюре плодово-ягідне або подрібнені шматочки плодів чи ягід, цукор, лимонну кислоту, желеутворюючий компонент, який відрізняється тим, що додатково містить цитрат натрію і воду, а як желеутворюючий компонент містить модифікований крохмаль при такому співвідношенні інгредієнтів в кг на 1000 кг продукту: пюре плодово-ягідне або подрібнені шматочки плодів чи ягід 290,0 -...
Пристрій для вимірювання кутової швидкості
Номер патенту: 55791
Опубліковано: 15.04.2003
Автори: Білинська Марина Йосипівна, Кухарчук Василь Васильович
МПК: G01P 3/36
Мітки: швидкості, пристрій, вимірювання, кутової
Формула / Реферат:
Пристрій для вимірювання кутової швидкості, що містить освітлювач, об'єктив, багатоелементний фотоприймальний пристрій, який відрізняється тим, що в нього введена багатогранна насадка на контрольований вал, виконана у вигляді правильного багатогранника, обчислювальний пристрій, при цьому освітлювач виконаний у вигляді імпульсного лазера, а багатоелементний фотоприймальний пристрій виконаний у вигляді матриці світлочутливих елементів, оптичний...
Пристрій для вимірювання кутової швидкості та прискорення
Номер патенту: 56722
Опубліковано: 15.05.2003
Автори: Кухарчук Василь Васильович, Білинська Марина Йосипівна, Білинський Йосип Йосипович
МПК: G01P 3/36, G01C 19/00
Мітки: швидкості, кутової, вимірювання, прискорення, пристрій
Формула / Реферат:
Пристрій для вимірювання кутової швидкості та кутового прискорення, який містить освітлювач, контрольований вал, об'єктив, оптично зв'язаний з входом багатоелементного фотоприймального пристрою, який відрізняється тим, що в нього введена насадка на контрольованому валу, виконана у вигляді Архімедової спіралі, оптично зв'язана з освітлювачем, що являє собою напівпровідниковий лазер, об'єктивом і обчислювальним пристроєм, вхід якого зв'язаний з...
Система гасіння початкової кутової швидкості космічного літального апарата
Номер патенту: 45064
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Кулік Анатолій Степанович, Педе Тетяна Юріївна
МПК: B64G 1/24
Мітки: початкової, система, гасіння, космічного, апарата, кутової, швидкості, літального
Формула / Реферат:
Система гасіння початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, блок підсилювачів потужності, вихід якого приєднаний до релейних виконавчих органів, яка відрізняється тим, що до неї введені блок визначення імпульсу післядії та комутатор, вихід датчика кутової швидкості приєднаний до входу блока визначення імпульсу післядії, перший вихід...
Попередній патент: Спосіб багаторазового швидкісного стопоріння
Наступний патент: Спосіб надлишкових вимірювань кутової швидкості
Випадковий патент: Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів та можливістю пошуку і розпізнавання ла для комбінованої лазерної системи