Трикомпонентний вимірювач кутової швидкості
Номер патенту: 55300
Опубліковано: 15.03.2005
Автори: Кулік Анатолій Степанович, Бандура Іван Миколайович, Симонов Володимир Федорович, Субота Анатолій Максимович
Формула / Реферат
1. Фруктовий наповнювач, який містить пюре плодово-ягідне або подрібнені шматочки плодів чи ягід, цукор, лимонну кислоту, желеутворюючий компонент, який відрізняється тим, що додатково містить цитрат натрію і воду, а як желеутворюючий компонент містить модифікований крохмаль при такому співвідношенні інгредієнтів в кг на 1000 кг продукту:
пюре плодово-ягідне або подрібнені шматочки плодів чи ягід
290,0 - 410,0
цукор
490,0 - 560,0
лимонна кислота
0,9 - 8,0
модифікований крохмаль
6,0 - 36,0
цитрат натрію
1,2 - 2,8
вода
решта.
2. Фруктовий наповнювач по п.1, який відрізняється тим, що додатково містить ароматизатор в кількості 0,4 - 1,3 кг на 1000 кг продукту.
3. Фруктовий наповнювач по п.1, який відрізняється тим, що додатково містить сорбінову кислоту в кількості 0,3 - 0,7 кг на 1000 кг продукту.
4. Фруктовий наповнювач по п.1, який відрізняється тим, що додатково містить штучний або натуральний барвник відповідно в кількості 0,1 - 0,2 кг або 0,5 - 2,0 кг на 1000 кг продукту.
Текст
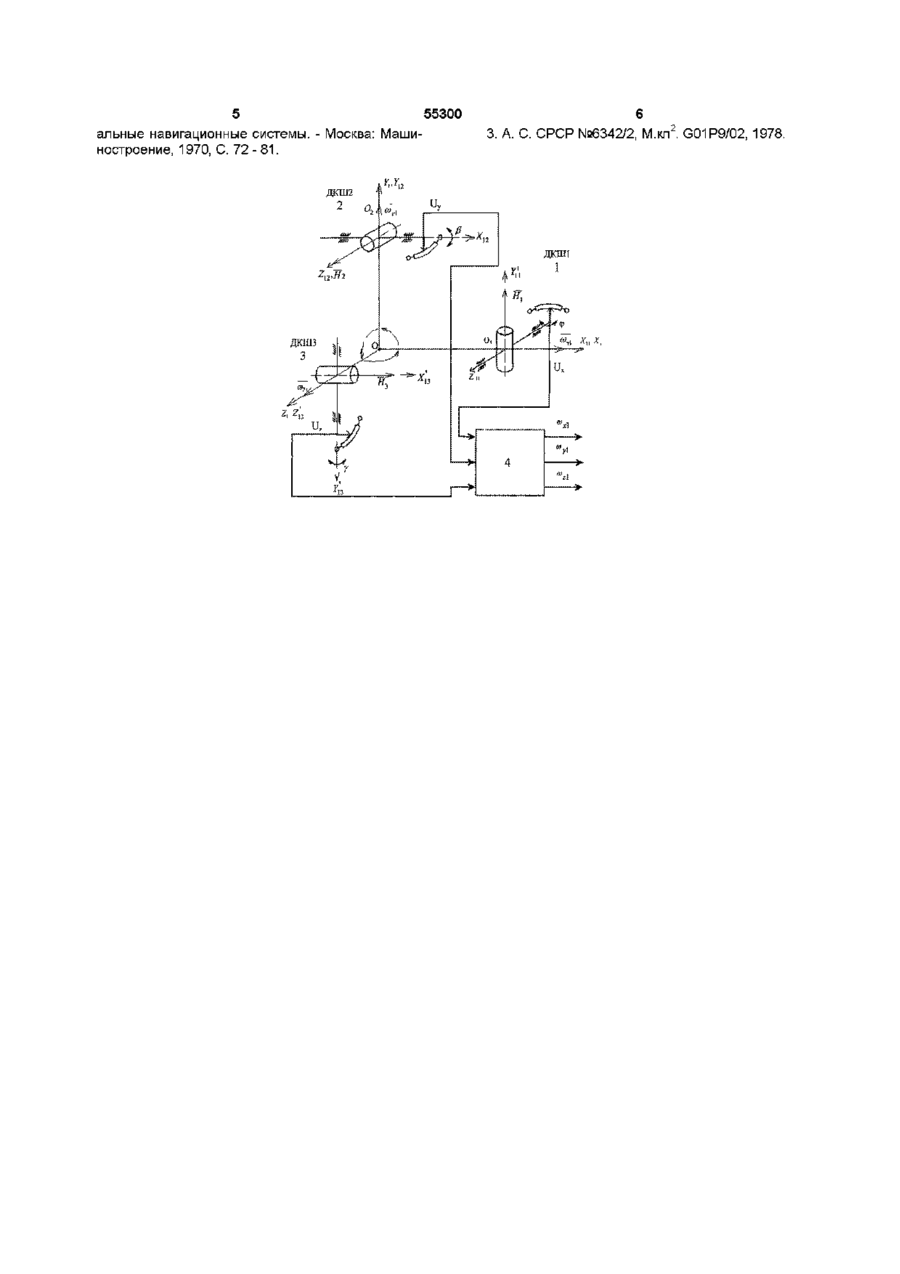
Трикомпонентний вимірювач кутової швидко Винахід відноситься до вимірювальної техніки, зокрема, до вимірювачів кутових швидкостей об'єктів, що рухаються Відомий блок датчиків кутових швидкостей(ДКШ), який складається з трьох незалежних датчиків кутових швидкостей, що використовують гіроскопи з двома ступенями свободи Вимірювальна вісь кожного датчика паралельна ВІДПОВІДНІЙ координатній ВІСІ об'єкта, а ВИХІДНІ ОСІ усіх датчиків розташовані в одній площині [1] Недоліком даного блока є наявність похибок із-за впливу перехресних кутових швидкостей, обумовлених розташуванням вихідних осей в одній площині Покажемо це на прикладі одного з каналів, наприклад, каналу вимірювання за допомогою датчика кутової швидкості курсу Для даного каналу рівняння, що описує положення чутливого елемента(ЧЕ) в стислому режимі, має вигляд K n p = Hco y1 cosp-Hco z1 sinp (1) де Кп - коефіцієнт пружності, р - кут повороту чутливого елемента, Н - кінетичний момент, ш у і, cuzi - складові кутові швидкості по курсу і тангажу, ВІДПОВІДНО Для реально використовуваних ДКШ кут повороту ЧЕ не перевищує 2,5 - 5град Отже, з високим ступенем точності можна прийняти cosp = 1, sinp= р Тоді рівняння (1) може бути записано у вигляді НЮу1-НЮ21р (2) сті, що містить обчислювач та три однокомпонентні гіроскопічні датчики, який відрізняється тим, що виходи трьох датчиків з'єднані з обчислювачем, а осі чутливості, осі кінетичного моменту та ВИХІДНІ осі цих датчиків зорієнтовані на рухомому об'єкті так, щоб у вказаній ПОСЛІДОВНОСТІ вище перелічені осі співпадали послідовно з ВІДПОВІДНИМИ осями зв'язаної з об'єктом ортогональної системи координат при їх обході в напрямку проти годинникової стрілки ЗВІДКИ р= hcoу1 1 + hcoz-| = h соу1 Н де h = — - чутливість ДКШ без впливу переК п хресної кутової швидкості cuzi h - чутливість ДКШ з урахуванням h = 1 + hcoz1 впливу перехресної кутової швидкості cuzi Аналогічно вплив перехресних кутових швидкостей на величину чутливості ДКШ виявляється по інших каналах Відомий трьохкомпонентний вимірювач кутової швидкості, що містить три однокомпонентних гіроскопічних датчики кутової швидкості та обчислювач, що виробляє коректуючі сигнали та обчислює величину кожної складової вектора кутової швидкості [2] Описаний в [2] вимірювач передбачає наявність платформи, що підтримує в визначеному положенні в шерціальному просторі, на якій встановлюється необхідний набір вимірювачів параметрів руху Недоліками такого вимірювача є великі масогабаритні показники та енергоспоживання Відомий найбільш близький(з досягаемою точністю) та вибраний в якості прототипу трьохкомпонентний вимірювач кутової швидкості, що використовує обчислювач та однокомпонентні датчики О о со Ю ю 55300 кутової швидкості, який для компенсації впливу на вихідний сигнал кутового прискорення або перехресної кутової швидкості по кожному каналу містить додаткові однокомпонентні датчики кутових швидкостей [3] Недоліками цього вимірювача є підвищені масо-габаритні характеристики та знижена надійність із-за наявності великої КІЛЬКОСТІ додаткових елементів В основу винаходу поставлено вирішення задачі визначення трьохкомпонентним вимірювачем з високою точністю кутової швидкості по будьякому з каналів шляхом вилучення впливу перехресних кутових швидкостей без використовування додаткових датчиків кутових швидкостей, що забезпечує зменшення масо-габаритних характеристикта підвищення надійності вимірювача Поставлена задача вирішується тим, що в трьохкомпонентному вимірювачі кутової швидкості, що містить обчислювач та три однокомпонентних гіроскопічних датчика в ВІДПОВІДНОСТІ З винаходом вісь чутливості, вісь кінетичного моменту Н та вихідна ВІСЬ(ВІСЬ повороту рухомого вузла) кожного з трьох одноосьових датчиків кутової швидкості орієнтовані на рухомому об'єкті так, щоб в зазначеній ПОСЛІДОВНОСТІ перелічені вище осі співпадали послідовно з ВІДПОВІДНИМИ ОСЯМИ зв'я заної з об'єктом ортогональної системи координат OX-IY-IZI при їх обході в напрямку проти годинникової стрілки Схема розміщення приладових осей кожного з датчиків OX'i|Y{|Z!|| (і = 1, 2, 3) по відношенню до осей зв'язаної з об'єктом системи координат OX-IY-IZI наведена на кресленні Трьохкомпонентний вимірювач містить перший ДКШ 1, другий ДКШ 2, третій ДКШ 3, виходи яких з'єднані з обчислювачем 4 Технічний результат досягається за рахунок такого розміщення приладових осей датчиків по відношенню до осей зв'язаної з об'єктом системи координат, при якому вилучається вплив перехресних кутових швидкостей без використовування додаткових датчиків Так, наприклад, якщо необхідно виміряти складову кутової швидкості ш у і, то вісь чутливості датчика розташовується паралельно ВІСІ Y-I, ВІСЬ кінетичного моменту Н - паралельно ВІСІ Z-I, a вихідна вісь - паралельно ВІСІ Х І Аналогічно розташовуються осі датчиків для вимірювання складових кутових швидкостей шхі та При такому розташуванні датчиків кутових швидкостей система рівнянь, що описує їх динаміку, може бути записана у вигляді І 2 р + К а 2 р + К П 2 р = Н 2 со у1 cos р - H 2 co z1 sin p (3) ІзУ + к езУ + к п з У = н з ю г і c o s У - н з ю х і s i n У де І, - моменти інерції гіроскопів, Ф, р, у - кути повороту ЧЕ першого, другого, третього ДКШ ВІДПОВІДНО, К а - коефіцієнти демпфірування, Km - коефіцієнти пружності, И, - кінетичні моменти, ш х і, ш у і , OJZI - проекції кутової швидкості на осі 4 ОХ-і, OY-i, OZi ВІДПОВІДНО Якщо величина частоти власних коливань рухомих вузлів гіроскопів шо рівна 8 - 10 величинам частот вимушених коливань об'єкта ш, а ступінь згасання % = 0,707, то коефіцієнт динамічної сприятливості 1 1і амплітуда відхилення рухомого вузла датчика кутової швидкості в динамічному режимі з високим ступенем точності співпадає з амплітудою в статичному режимі А 5 = А С т ^ = Аст Таким чином, динамічними похибками можна знехтувати і в подальшому систему рівнянь (3) можна розглядати для статичного режиму К п 1 ф = Н1сок1 coscp-H-iCOyi sin ф К П 2 Р= H 2 co y1 cosp-H 2 a) z1 sin p (4) к п з ї = Чзс^гі cosy- Н3сок1 siny Оскільки кути поворотів ер, р, у не перевищують 2,5 - 5град, можна покласти соєф = cosp = COS у = 1, БІПф = ф, Sin(3 = (3, Sin у = у Оберемо три ідентичні прилади та введемо позначення Km = Кп2 - Кпз - Кп - коефіцієнт пружності, Ні = Н 2 = Нз = Н - кінетичний момент, и - чутливість рухомого вузла(проскопа h1 = к п як чутливого елемента, що реагує на кутову швидкість), п 9 = —^- - чутливість вихідного 2р перетворюва ча потенціометричного типу, І І Ж - напруга джерела живлення, 2ро - розмах потенціометра, U x , Uy, U z - ВИХІДНІ сигнали датчиків, що знімаються з ВІДПОВІДНИХ перетворювачів Після вирішення системи рівнянь (4) відносно невідомих ш х і , ш у і,та w z i через ВИХІДНІ сигнали датчиків отримаємо сох1 = x + h2UxUy + UxUyU; h^i-u'uyUJ y + h2UyUz + UxUyUz (5) UxUyUz Таким чином, проекції кутової швидкості на кожну вісь визначаються за вихідними сигналами усіх датчиків, що виключає вплив перехресних кутових швидкостей Обчислення значень ш х і, ш у і та w z i ВІДПОВІДНО виразам (5) виконується за допомогою бортового обчислювача Джерела інформації 1 Автопілот АП-28 Техническое описание Москва Машиностроение, 1973, С 46, рис 67 2 Геренштейн И А , Шульман И А Инерци 55300 альные навигационные системы. - Москва: Машиностроение, 1970, С. 72 - 81. 3. А. С. СРСР №6342/2, М.кп . G01P9/02, 1978.
ДивитисяДодаткова інформація
Назва патенту англійськоюThree-component angular velocity meter
Автори англійськоюKulik Anatolii Stepanovych, Subota Anatolii Maksymovych, Bandura Ivan Mykolaiovych, Symonov Volodymyr Fedorovych
Назва патенту російськоюТрехкомпонентный измеритель угловой скорости
Автори російськоюКулик Анатолий Степанович, Субота Анатолий Максимович, Бандура Иван Николаевич, Симонов Владимир Федорович
МПК / Мітки
МПК: G01P 9/00
Мітки: вимірювач, трикомпонентний, кутової, швидкості
Код посилання
<a href="https://ua.patents.su/3-55300-trikomponentnijj-vimiryuvach-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Трикомпонентний вимірювач кутової швидкості</a>
Спосіб та пристрій для вимірювання кутової швидкості
Номер патенту: 61044
Опубліковано: 15.10.2003
Автори: Мурзаханов Олександр Валентинович, Шервашидзе Володимир Варламович, Леоненко Костянтин Миколайович
МПК: G01P 9/00
Мітки: спосіб, кутової, вимірювання, швидкості, пристрій
Формула / Реферат:
1. Спосіб для вимірювання кутової швидкості (), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають...
Датчик кутової швидкості

Номер патенту: 2678
Опубліковано: 15.07.2004
Автори: Шкляр Володимир Петрович, Самусь Андрій Ігорович, Шервашидзе Володимир Варламович, Мурзаханов Олександр Валентинович
МПК: G01P 9/00
Мітки: кутової, швидкості, датчик
Формула / Реферат:
Датчик кутової швидкості, що містить чутливий елемент з гіромотором і системою підвісу, датчик кутового положення, наприклад, індуктивного типу, блок управління рухом чутливого елементу, схему вимірювання кутової швидкості, який відрізняється тим, що до його складу введені обмежувач та інвертуючий інтегратор, причому вхід та вихід інвертуючого інтегратора з'єднані через обмежувач з виходом та входом схеми вимірювання кутової швидкості...
Пристрій для вимірювання кутової швидкості та прискорення
Номер патенту: 56722
Опубліковано: 15.05.2003
Автори: Білинська Марина Йосипівна, Білинський Йосип Йосипович, Кухарчук Василь Васильович
МПК: G01P 3/36, G01C 19/00
Мітки: вимірювання, кутової, швидкості, прискорення, пристрій
Формула / Реферат:
Пристрій для вимірювання кутової швидкості та кутового прискорення, який містить освітлювач, контрольований вал, об'єктив, оптично зв'язаний з входом багатоелементного фотоприймального пристрою, який відрізняється тим, що в нього введена насадка на контрольованому валу, виконана у вигляді Архімедової спіралі, оптично зв'язана з освітлювачем, що являє собою напівпровідниковий лазер, об'єктивом і обчислювальним пристроєм, вхід якого зв'язаний з...
Датчик кутової швидкості
Номер патенту: 2109
Опубліковано: 15.10.2003
Автори: Леоненко Костянтин Миколайович, Шервашидзе Володимир Варламович, Мурзаханов Олександр Валентинович
МПК: G01P 9/00, G01P 11/00
Мітки: швидкості, кутової, датчик
Формула / Реферат:
1. Датчик кутової швидкості, що містить розміщений за допомогою гнучкого підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку, схему визначення показника кутової швидкості, при цьому компенсаційна котушка силового перетворювача кола зворотного зв'язку встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів, а коло зворотного...
Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61160
Опубліковано: 17.11.2003
Автори: Гуменюк Володимир Григорович, Леоненко Сергій Миколайович, Шервашидзе Володимир Варлаамович, Шкляр Володимир Петрович, Васильєв Володимир Леонідович, Гаврилюк Володимир Леонідович, Олексієнко Микола Петрович
Мітки: швидкості, обробки, пристрій, спосіб, диференційних, сигналів, пристрою, здійснення, вимірювання, кутової, блок
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості, за яким визначають переміщення чутливого елемента з гіромотором, який розміщують на об'єкті, кутову швидкість якого виміряють, величину переміщення перетворюють в електричний сигнал, на основі якого формують компенсаційу силу, пропорційну кутовій швидкості вказаного об'єкта, і під впливом якої чутливий елемент повертається у зрівноважене положення, по величині якої визначають величину кутової...
Попередній патент: Циліндровий замок бардаченка
Наступний патент: Спосіб волочіння труб
Випадковий патент: Універсальний люкопідйомник