Спосіб дистанційної зйомки
Номер патенту: 95696
Опубліковано: 25.08.2011
Автори: Бурачек Всеволод Германович, Зацерковний Віталій Іванович, Станкевич Сергій Арсенійович, Попов Михайло Олексійович


Формула / Реферат
Спосіб дистанційної зйомки аерокосмічних знімків, що ґрунтується на субпіксельній технології, який відрізняється тим, що при зйомці виконують кутове зміщення оптичної осі знімального приладу по напрямку рядків і стовпців фотоприймача матриці на кількість позицій ![]() з інтервалом:
з інтервалом: ![]() ,
,
де: ![]() - лінійний розмір сторони квадрата піксела матриці;
- лінійний розмір сторони квадрата піксела матриці;
![]() - фокусна відстань об'єктива цифрової камери;
- фокусна відстань об'єктива цифрової камери;
![]() - кутова константа,
- кутова константа,
при цьому при дешифруванні визначають рівень електричних сигналів від засвічування прямокутних ділянок ![]() пікселів, де
пікселів, де ![]() - короткий бік прямокутної ділянки відповідно по напрямках рядків і стовпців, базуючись на групи пікселів з рівним рівнем сигналів від їх засвічування, переважно мінімального рівня, після чого по даних сигналах від прямокутних ділянок визначають рівень електричного сигналу для кожної ділянки піксела площиною
- короткий бік прямокутної ділянки відповідно по напрямках рядків і стовпців, базуючись на групи пікселів з рівним рівнем сигналів від їх засвічування, переважно мінімального рівня, після чого по даних сигналах від прямокутних ділянок визначають рівень електричного сигналу для кожної ділянки піксела площиною ![]() , що відповідає його засвічуванню, і таким чином поділяють кожний піксел ПЗЗ-матриці на
, що відповідає його засвічуванню, і таким чином поділяють кожний піксел ПЗЗ-матриці на ![]() субпікселів.
субпікселів.
Текст
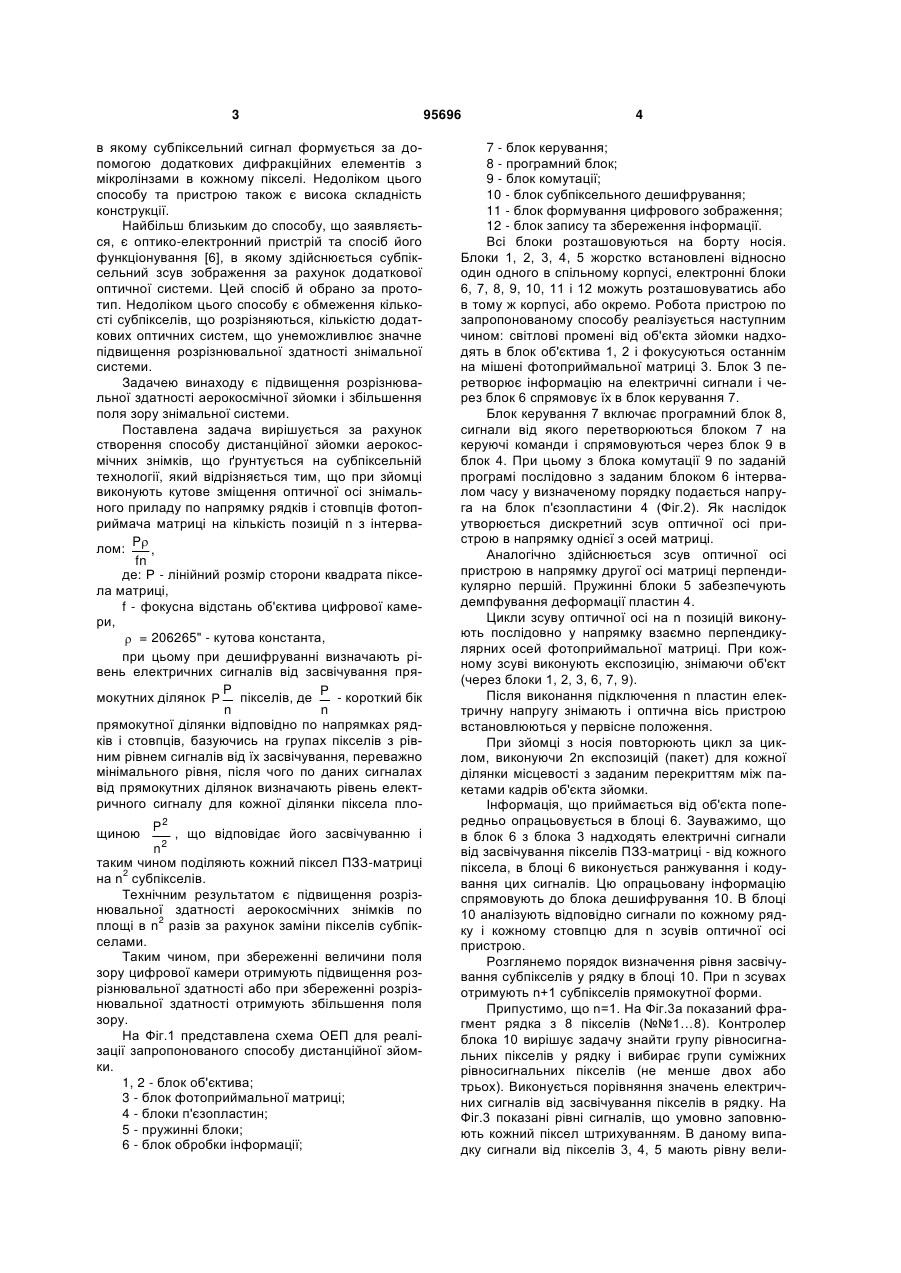
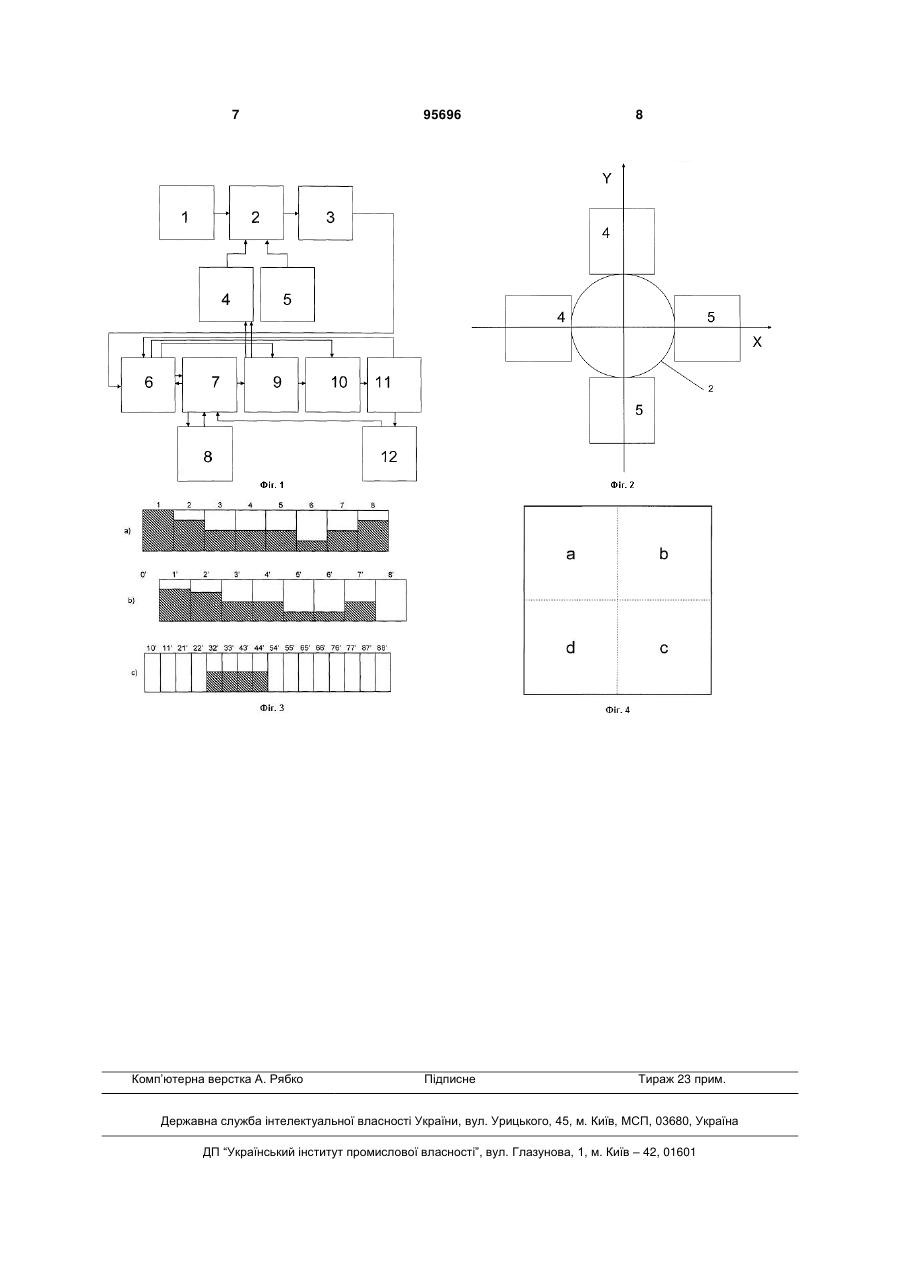
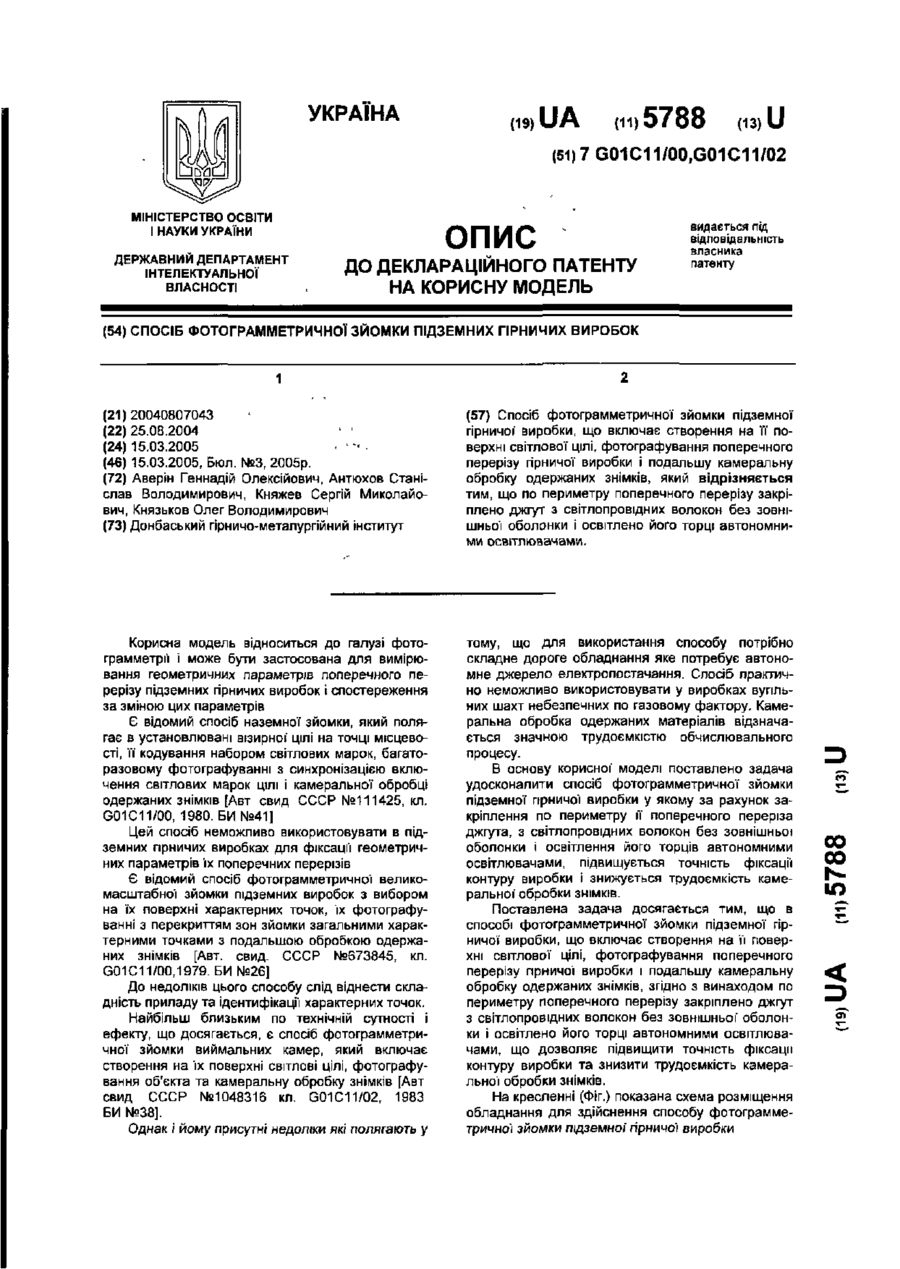
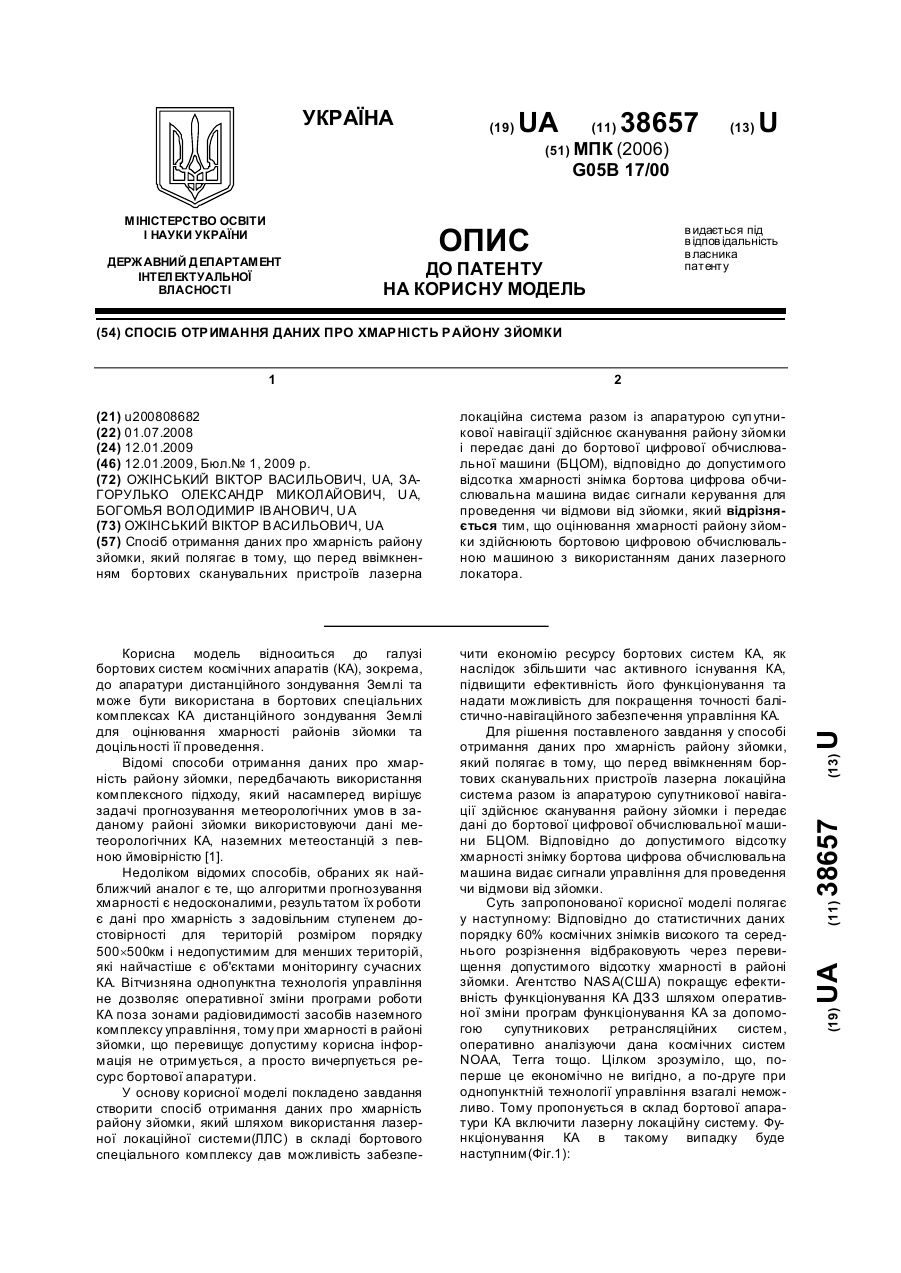
Спосіб дистанційної зйомки аерокосмічних знімків, що ґрунтується на субпіксельній технології, який відрізняється тим, що при зйомці виконують кутове зміщення оптичної осі знімального приладу по напрямку рядків і стовпців фотоприй 3 в якому субпіксельний сигнал формується за допомогою додаткових дифракційних елементів з мікролінзами в кожному пікселі. Недоліком цього способу та пристрою також є висока складність конструкції. Найбільш близьким до способу, що заявляється, є оптико-електронний пристрій та спосіб його функціонування [6], в якому здійснюється субпіксельний зсув зображення за рахунок додаткової оптичної системи. Цей спосіб й обрано за прототип. Недоліком цього способу є обмеження кількості субпікселів, що розрізняються, кількістю додаткових оптичних систем, що унеможливлює значне підвищення розрізнювальної здатності знімальної системи. Задачею винаходу є підвищення розрізнювальної здатності аерокосмічної зйомки і збільшення поля зору знімальної системи. Поставлена задача вирішується за рахунок створення способу дистанційної зйомки аерокосмічних знімків, що ґрунтується на субпіксельній технології, який відрізняється тим, що при зйомці виконують кутове зміщення оптичної осі знімального приладу по напрямку рядків і стовпців фотоприймача матриці на кількість позицій n з інтерваP лом: , fn де: Р - лінійний розмір сторони квадрата піксела матриці, f - фокусна відстань об'єктива цифрової камери, = 206265" - кутова константа, при цьому при дешифруванні визначають рівень електричних сигналів від засвічування пряP P мокутних ділянок P пікселів, де - короткий бік n n прямокутної ділянки відповідно по напрямках рядків і стовпців, базуючись на групах пікселів з рівним рівнем сигналів від їх засвічування, переважно мінімального рівня, після чого по даних сигналах від прямокутних ділянок визначають рівень електричного сигналу для кожної ділянки піксела площиною P2 , що відповідає його засвічуванню і n2 таким чином поділяють кожний піксел ПЗЗ-матриці 2 на n субпікселів. Технічним результатом є підвищення розрізнювальної здатності аерокосмічних знімків по 2 площі в n разів за рахунок заміни пікселів субпікселами. Таким чином, при збереженні величини поля зору цифрової камери отримують підвищення розрізнювальної здатності або при збереженні розрізнювальної здатності отримують збільшення поля зору. На Фіг.1 представлена схема ОЕП для реалізації запропонованого способу дистанційної зйомки. 1, 2 - блок об'єктива; 3 - блок фотоприймальної матриці; 4 - блоки п'єзопластин; 5 - пружинні блоки; 6 - блок обробки інформації; 95696 4 7 - блок керування; 8 - програмний блок; 9 - блок комутації; 10 - блок субпіксельного дешифрування; 11 - блок формування цифрового зображення; 12 - блок запису та збереження інформації. Всі блоки розташовуються на борту носія. Блоки 1, 2, 3, 4, 5 жорстко встановлені відносно один одного в спільному корпусі, електронні блоки 6, 7, 8, 9, 10, 11 і 12 можуть розташовуватись або в тому ж корпусі, або окремо. Робота пристрою по запропонованому способу реалізується наступним чином: світлові промені від об'єкта зйомки надходять в блок об'єктива 1, 2 і фокусуються останнім на мішені фотоприймальної матриці 3. Блок З перетворює інформацію на електричні сигнали і через блок 6 спрямовує їх в блок керування 7. Блок керування 7 включає програмний блок 8, сигнали від якого перетворюються блоком 7 на керуючі команди і спрямовуються через блок 9 в блок 4. При цьому з блока комутації 9 по заданій програмі послідовно з заданим блоком 6 інтервалом часу у визначеному порядку подається напруга на блок п'єзопластини 4 (Фіг.2). Як наслідок утворюється дискретний зсув оптичної осі пристрою в напрямку однієї з осей матриці. Аналогічно здійснюється зсув оптичної осі пристрою в напрямку другої осі матриці перпендикулярно першій. Пружинні блоки 5 забезпечують демпфування деформації пластин 4. Цикли зсуву оптичної осі на n позицій виконують послідовно у напрямку взаємно перпендикулярних осей фотоприймальної матриці. При кожному зсуві виконують експозицію, знімаючи об'єкт (через блоки 1, 2, 3, 6, 7, 9). Після виконання підключення n пластин електричну напругу знімають і оптична вісь пристрою встановлюються у первісне положення. При зйомці з носія повторюють цикл за циклом, виконуючи 2n експозицій (пакет) для кожної ділянки місцевості з заданим перекриттям між пакетами кадрів об'єкта зйомки. Інформація, що приймається від об'єкта попередньо опрацьовується в блоці 6. Зауважимо, що в блок 6 з блока 3 надходять електричні сигнали від засвічування пікселів ПЗЗ-матриці - від кожного піксела, в блоці 6 виконується ранжування і кодування цих сигналів. Цю опрацьовану інформацію спрямовують до блока дешифрування 10. В блоці 10 аналізують відповідно сигнали по кожному рядку і кожному стовпцю для n зсувів оптичної осі пристрою. Розглянемо порядок визначення рівня засвічування субпікселів у рядку в блоці 10. При n зсувах отримують n+1 субпікселів прямокутної форми. Припустимо, що n=1. На Фіг.3a показаний фрагмент рядка з 8 пікселів (№№1…8). Контролер блока 10 вирішує задачу знайти групу рівносигнальних пікселів у рядку і вибирає групи суміжних рівносигнальних пікселів (не менше двох або трьох). Виконується порівняння значень електричних сигналів від засвічування пікселів в рядку. На Фіг.3 показані рівні сигналів, що умовно заповнюють кожний піксел штрихуванням. В даному випадку сигнали від пікселів 3, 4, 5 мають рівну вели 5 чину сигналу, яку можна визначити по шкалі сірого тону. В наведеному прикладі прийняті наступні рівні сигналів від засвічування пікселів (у відсотках максимальних рівнів): 1-100 %, 2-75 %, 3-50 %, 450 %, 5-50 %, 6-25 %, 7-50 %, 8-75 %. Після зсуву оптичної осі пристрою маємо зсув зображення на ПЗЗ-матриці на величину P , де n1 Р - лінійний розмір квадратного піксела. Наприклад при n=1 отримують сигнали від засвічування тих же пікселів, але тепер уже зсунутих у напрямку P лінії рядків на величину . 2 Представимо рівні цих сигналів як заповнені штрихуванням квадрати 0', 1', 2', … 7' (Фіг.3b) з приблизними значеннями рівнів відповідних двом суміжним пікселам у ряді 1…8. Отримаємо у відсотках: 1' - 88 %, 2' - 62 %, 3' - 50 %, 4' - 50 %, 5' 38 %, 6' - 38 %, 7' - 62 %. По даних сигналів в квадратах пікселів на Фіг.3a і 3b на Фіг.3c аналогічно можна сформувати рівні сигналів в прямокутниках з коротким боком P , позначені як 10', 11', 21', 22', 32', 33', 43', 44', 2 54', 55', 65', 66', 76', 77', 87'. Звернемо увагу, що на Фіг.3а рівносигнальну границю утворюють сигнали в квадратах 3, 4, 5; на Фіг.3b - в квадратах 3', 4' і на Фіг.3c - в прямокутниках 33', 43', 44', 54', кожний з яких дорівнює 50 % максимального рівня. Треба відзначити, що в рівносигнальній групі 33', 43', 44', 54' отримані значення і еквівалентність рівнів сигналів є більш точними і достовірними у порівнянні з іншими "напівпікселами" ряду. При цьому, чим більше є пікселів в рівносигнальних границях (у рядку, стовпцю) і більше таких границь, тим точніші результати визначення рівнів сигналів від усіх напівпікселів. Після цього, базуючись на рівносигнальну групу (33'…54'), визначають в блоці 10 рівні сигналів у всіх прямокутниках рядка (тобто у відповідних напівпікселах). При цьому контролюють отримані значення по інших рівносигнальних групах у даному рядку і при необхідності виконують обчислювальне урівнювання сигналів. По вищеописаній технології в блоці 10 визнаP чають (по сигналах в прямокутниках P ) сигнали 2 P P P в прямокутниках P , P , P і т.д. 16 32 4 Аналогічно виконують поділ рівня сигналу по стовпцях фотоприймальної матриці і визначають сигнали від прямокутних напівпікселів. Таким чином, в блоці 10 будуть визначені сигнали в напівпіP кселах P по рядках і стовпцях. 2 Розглянемо ситуацію в окремому пікселі. На Фіг.4 показаний квадрат піксела з визначеними в 95696 6 блоці 10 сигналами в прямокутниках: u1=a+b; u2=c+d; u3=a+d; u4=b+c; Якщо розглянутий квадрат (піксел) знаходиться в межах рівносигнальної групи (по рядках або стовпцях), наприклад, якщо u3=u4, то очевидним є u u те, що a b 1 а; c d 2 , то по даних алго2 2 ритмах визначають рівні сигналів від засвічування чвертьпікселів a, b, c, d в пікселі рівносигнальної групи. За межами цієї групи по виміряних і визначених значеннях згаданих сигналів чвертьпікселів визначають рівні сигналів від засвічування інших чвертьпікселів в рядках і стовпцях. Аналогічно в блоці 10 виконують розподіл сиг1 1 1 налу піксела від до , від до 1 і так 32 4 16 16 далі на площах P2 при значеннях n=16, 32 і т.п. n2 Треба відзначити, що можна визначити сигнали субпікселів при непарному n. Після перетворень в блоці 10 сигналів пікселів в сигнали субпікселів, останнім привласнюються відповідні новій (збільшеній) матриці номери і коди і передаються на вхід блока формування цифрового зображення 11, від якого спрямовують сигнали про формування зображення в блоці 6, а також зображення в блок 12 для запису і збереження. Таким чином, запропонований спосіб дистанційної зйомки дозволяє виконувати дистанційну зйомку і формування аерокосмічних зображень з підвищеною розрізнювальною здатністю за рахунок побудови субпіксельної аналізуючої матриці зображення. Джерела інформації: 1. Савиных В.П., Цветков В.Я. Геоинформационный анализ данных дистанционного зондирования Земли. - М.: Картгеоцентр-Геодезидат, 2001. 228 с. 2. Дорожинський О.Л. Основи фотограмметрії. - Львів: Видавництво Національного університету "Львівська політехніка", 2003. - 214 с. 3. Shiba H. Image registration method, image registration apparatus and recording medium / United States Patent No 6,434,279. - August 13, 2002. 4.Jackson W.B., Jared D.A., Basu S., Biegelsen D.K.Position sensitive detector based image conversion system capable of preserving subpixel information / United States Patent No 5,754,690. May 19, 1998. 5. Mendlovic D., Zaievsky Z., Konforti N., Marom E., Shabtay G., Levy U., Karako S. Super-resolving imaging system / United States Patent No 6,344,893. - February 5, 2002. 6. Waslowski К., Merettig G. Opto-electronic device and method for its operation / European Patent No 1821120. - 16.02.2007. 7 Комп’ютерна верстка А. Рябко 95696 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of remote survey
Автори англійськоюBurachek Vsevolod Hermanovych, Zatserkovnyi Vitalii Ivanovych, Popov Mykhailo Oleksiiovych, Stankevych Serhii Arseniiovych
Назва патенту російськоюСпособ дистанционной съемки
Автори російськоюБурачек Всеволод Германович, Зацерковный Виталий Иванович, Попов Михаил Алексеевич, Станкевич Сергей Арсениевич
МПК / Мітки
МПК: G01C 11/00
Мітки: зйомки, спосіб, дистанційно
Код посилання
<a href="https://ua.patents.su/4-95696-sposib-distancijjno-zjjomki.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційної зйомки</a>
Спосіб коригування результатів спектрального аналізу матеріалів дистанційної зйомки грунту

Номер патенту: 19604
Опубліковано: 15.12.2006
Автори: Ачасов Андрій Борисович, Бідолах Дмитро Ілліч
МПК: G01C 11/00
Мітки: спектрального, аналізу, матеріалів, коригування, зйомки, результатів, грунту, дистанційно, спосіб
Формула / Реферат:
Спосіб коригування результатів спектрального аналізу матеріалів дистанційної зйомки ґрунту, що включає дистанційне знімання ґрунтових поверхонь, відбір зразків з верхнього шару ґрунту з прив'язкою місць відбору за допомогою GPS-приймача до глобальної системи координат, який відрізняється тим, що на прив'язаному космічному знімку по кожній точці відбору зразків комп'ютерно визначають значення яскравостей еталона на знімку по трьох спектральних...
Спосіб формування зображення об’єкта зйомки з використанням брекетингу експозиції

Номер патенту: 50559
Опубліковано: 10.06.2010
Автори: Подолян Олександр Петрович, Колобродов Валентин Георгійович, Півторак Діана Олександрівна
МПК: G06T 5/50
Мітки: зйомки, брекетингу, зображення, експозиції, спосіб, об'єкта, формування, використанням
Формула / Реферат:
1. Спосіб формування зображення об'єкта зйомки з використанням брекетенгу експозиції, що полягає в одержанні серії цифрових зображень одного й того ж об'єкта, виконаних при однакових зовнішніх умовах і при різних рівнях експозиції з подальшою побудовою результуючого цифрового зображення, який відрізняється тим, що спочатку для кожного піксела кожного цифрового зображення розраховують або вимірюють значення параметра, що визначає ефективність...
Спосіб фотограмметричної зйомки підземних гірничих виробок
Номер патенту: 5788
Опубліковано: 15.03.2005
Автори: Князьков Олег Володимирович, Аверін Геннадій Олексійович, Княжев Сергій Миколайович, Антюхов Станіслав Володимирович
МПК: G01C 11/00
Мітки: виробок, зйомки, підземних, гірничих, спосіб, фотограмметричної
Формула / Реферат:
Спосіб фотограмметричної зйомки підземної гірничої виробки, що включає створення на її поверхні світлової цілі, фотографування поперечного перерізу гірничої виробки і подальшу камеральну обробку одержаних знімків, який відрізняється тим, що по периметру поперечного перерізу закріплено джгут з світлопровідних волокон без зовнішньої оболонки і освітлено його торці автономними освітлювачами.
Спосіб отримання даних про хмарність району зйомки
Номер патенту: 38657
Опубліковано: 12.01.2009
Автори: Богом'я Володимир Іванович, Загорулько Олександр Миколайович, Ожінський Віктор Васильович
МПК: G05B 17/00
Мітки: хмарність, отримання, даних, спосіб, зйомки, району
Формула / Реферат:
Спосіб отримання даних про хмарність району зйомки, який полягає в тому, що перед ввімкненням бортових сканувальних пристроїв лазерна локаційна система разом із апаратурою супутникової навігації здійснює сканування району зйомки і передає дані до бортової цифрової обчислювальної машини (БЦОМ), відповідно до допустимого відсотка хмарності знімка бортова цифрова обчислювальна машина видає сигнали керування для проведення чи відмови від зйомки,...
Спосіб визначення колірної температури тіл за допомогою цифрової зйомки
Номер патенту: 51578
Опубліковано: 26.07.2010
Автор: Семенов Костянтин Іванович
МПК: G01J 5/60
Мітки: допомогою, визначення, колірної, спосіб, температури, цифрової, тіл, зйомки
Формула / Реферат:
Спосіб визначення температури тіл за допомогою цифрової зйомки, що включає визначення інтенсивності випромінювання тіл за допомогою матриці датчиків випромінювання, наприклад матриці ПЗЗ цифрового фотоапарата, який відрізняється тим, що випромінювання тіл за допомогою додаткових інтерференційних фільтрів і системи дзеркал, і/або призм, фіксують на одній матриці в декількох ділянках спектра шляхом накладення зображень в них (для...
Наступний патент: Пристрій для дистанційної зйомки
Випадковий патент: Аероінсоляційний комплекс для лікування опікових хворих "фенікс-мс"