Пристрій для дистанційної зйомки
Номер патенту: 95697
Опубліковано: 25.08.2011
Автори: Бурачек Всеволод Германович, Станкевич Сергій Арсенійович, Зацерковний Віталій Іванович, Попов Михайло Олексійович

Формула / Реферат
Пристрій для дистанційнї зйомки, що містить цифрову знімальну камеру з рухомим компонентом об'єктива і фотоприймальною аналізуючою матрицею (ФАМ), блок обробки інформації (БОI), блок керування (БУ), блок формування цифрового зображення (БФЦЗ), блок запису та збереження інформації (БЗЗІ), який відрізняється тим, що рухомий компонент об'єктива механічно стикований з двома блоками п'єзоелектричних пластин (БПП) і двома пружинними блоками по двох взаємно перпендикулярних осях, що відповідають напрямкам осей фотоприймальної аналізуючої матриці, при цьому пристрій містить програмний блок (ПрБ), блок комутації (БК) та блок субпіксельного дешифрування (БСД), причому вихід ПрБ електрично зв'язаний зі входом БУ, вихід БУ зв'язаний зі входом ПБ, другий вихід БУ зв'язаний зі входом БК, другий вхід БК зв'язаний з виходом БОI, два виходи БК зв'язані зі входами двох блоків БПП, третій вихід БК зв'язаний зі входом БСД, другий вхід БСД зв'язаний з виходом БОI, а вихід БСД зв'язаний зі входом БФЦЗ.
Текст
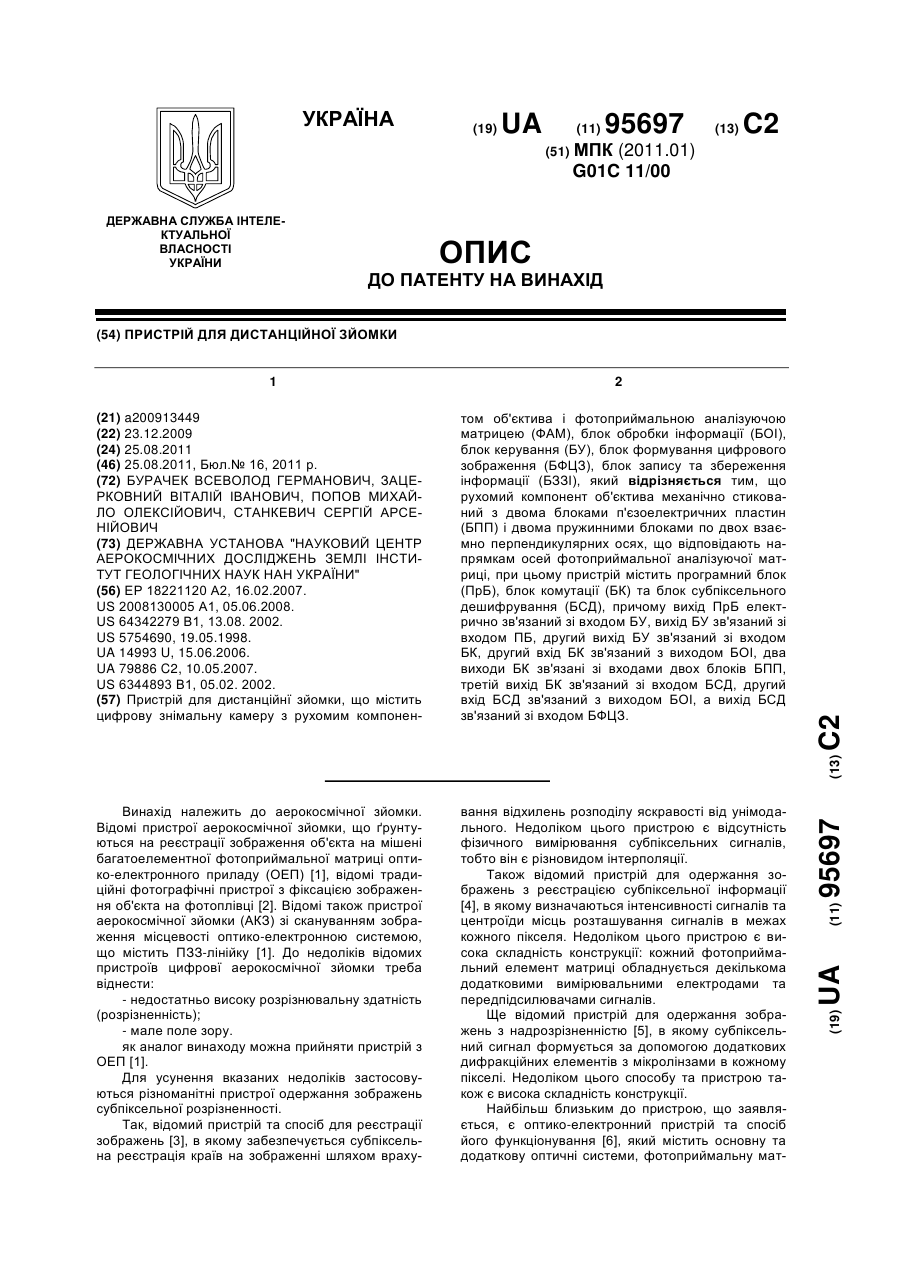
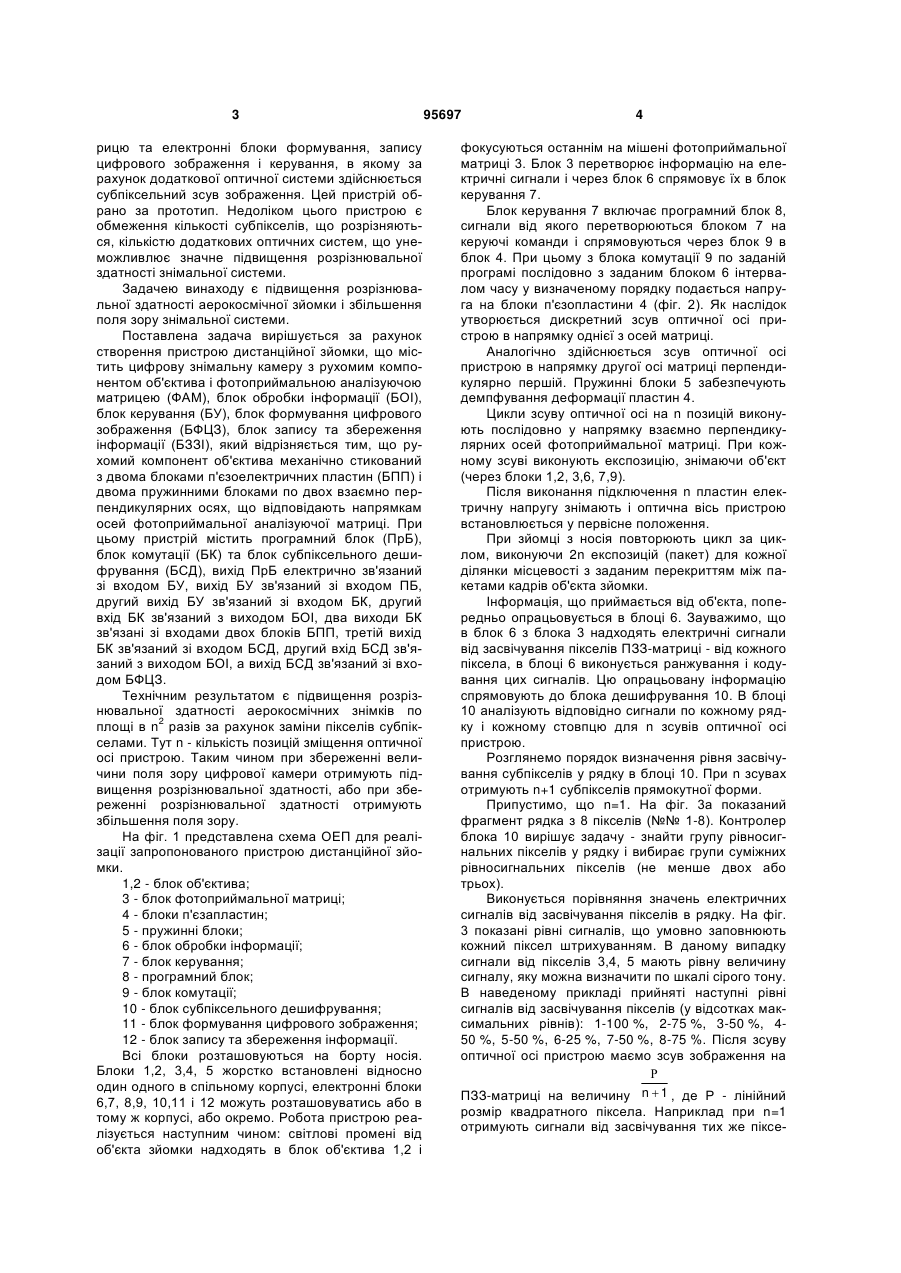
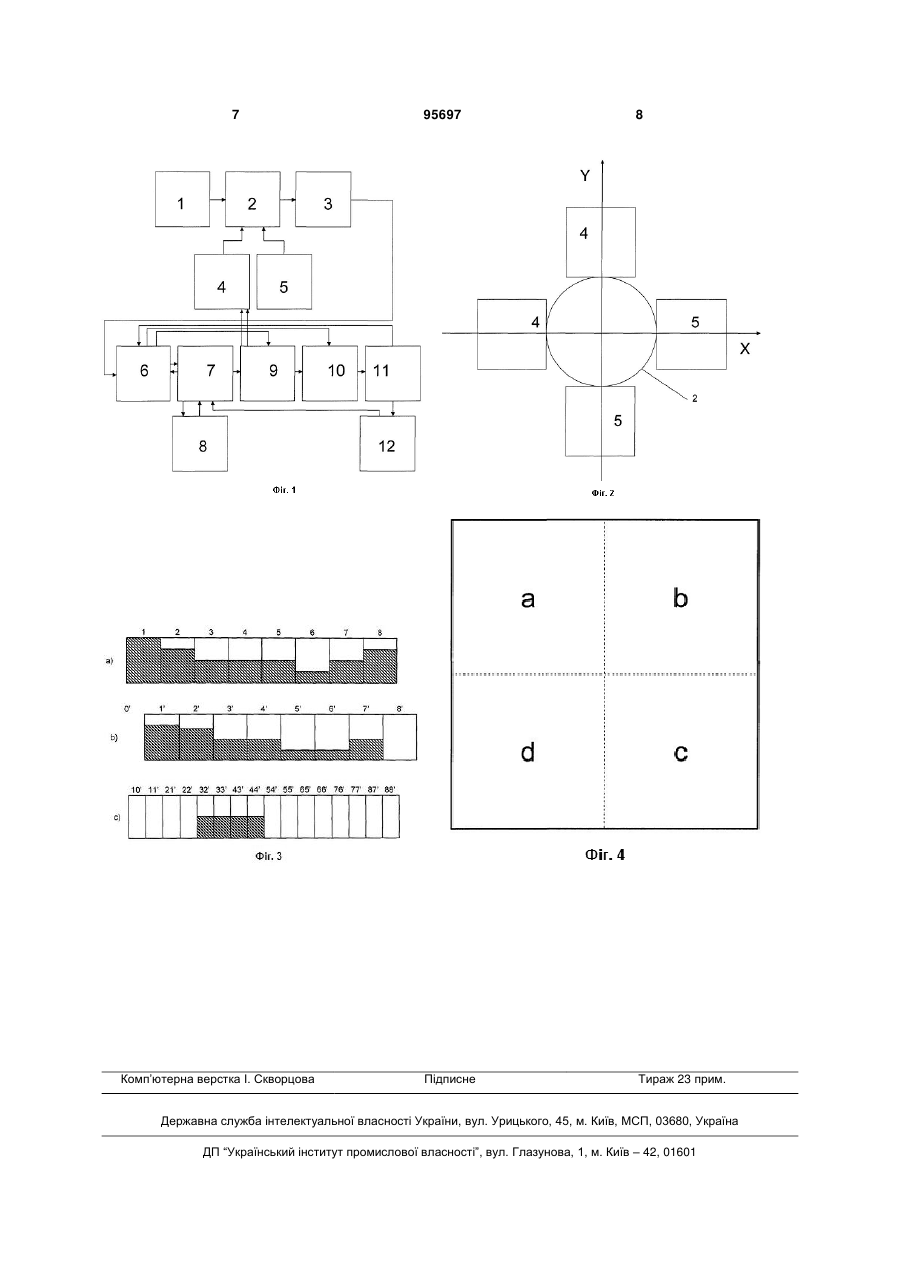
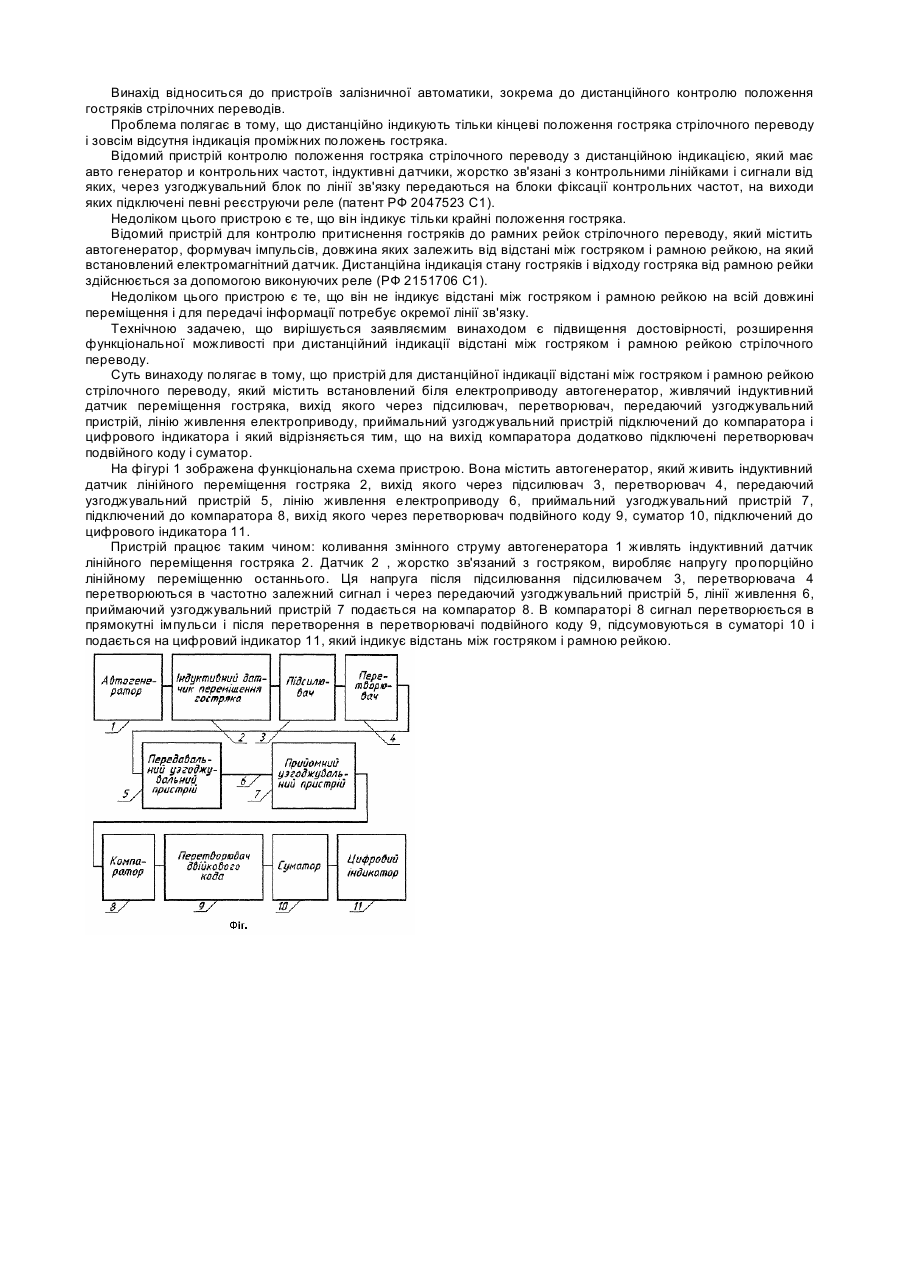
Пристрій для дистанційнї зйомки, що містить цифрову знімальну камеру з рухомим компонен C2 1 3 рицю та електронні блоки формування, запису цифрового зображення і керування, в якому за рахунок додаткової оптичної системи здійснюється субпіксельний зсув зображення. Цей пристрій обрано за прототип. Недоліком цього пристрою є обмеження кількості субпікселів, що розрізняються, кількістю додаткових оптичних систем, що унеможливлює значне підвищення розрізнювальної здатності знімальної системи. Задачею винаходу є підвищення розрізнювальної здатності аерокосмічної зйомки і збільшення поля зору знімальної системи. Поставлена задача вирішується за рахунок створення пристрою дистанційної зйомки, що містить цифрову знімальну камеру з рухомим компонентом об'єктива і фотоприймальною аналізуючою матрицею (ФАМ), блок обробки інформації (БОІ), блок керування (БУ), блок формування цифрового зображення (БФЦЗ), блок запису та збереження інформації (БЗЗІ), який відрізняється тим, що рухомий компонент об'єктива механічно стикований з двома блоками п'єзоелектричних пластин (БПП) і двома пружинними блоками по двох взаємно перпендикулярних осях, що відповідають напрямкам осей фотоприймальної аналізуючої матриці. При цьому пристрій містить програмний блок (ПрБ), блок комутації (БК) та блок субпіксельного дешифрування (БСД), вихід ПрБ електрично зв'язаний зі входом БУ, вихід БУ зв'язаний зі входом ПБ, другий вихід БУ зв'язаний зі входом БК, другий вхід БК зв'язаний з виходом БОI, два виходи БК зв'язані зі входами двох блоків БПП, третій вихід БК зв'язаний зі входом БСД, другий вхід БСД зв'язаний з виходом БОІ, а вихід БСД зв'язаний зі входом БФЦЗ. Технічним результатом є підвищення розрізнювальної здатності аерокосмічних знімків по 2 площі в n разів за рахунок заміни пікселів субпікселами. Тут n - кількість позицій зміщення оптичної осі пристрою. Таким чином при збереженні величини поля зору цифрової камери отримують підвищення розрізнювальної здатності, або при збереженні розрізнювальної здатності отримують збільшення поля зору. На фіг. 1 представлена схема ОЕП для реалізації запропонованого пристрою дистанційної зйомки. 1,2 - блок об'єктива; 3 - блок фотоприймальної матриці; 4 - блоки п'єзапластин; 5 - пружинні блоки; 6 - блок обробки інформації; 7 - блок керування; 8 - програмний блок; 9 - блок комутації; 10 - блок субпіксельного дешифрування; 11 - блок формування цифрового зображення; 12 - блок запису та збереження інформації. Всі блоки розташовуються на борту носія. Блоки 1,2, 3,4, 5 жорстко встановлені відносно один одного в спільному корпусі, електронні блоки 6,7, 8,9, 10,11 і 12 можуть розташовуватись або в тому ж корпусі, або окремо. Робота пристрою реалізується наступним чином: світлові промені від об'єкта зйомки надходять в блок об'єктива 1,2 і 95697 4 фокусуються останнім на мішені фотоприймальної матриці 3. Блок 3 перетворює інформацію на електричні сигнали і через блок 6 спрямовує їх в блок керування 7. Блок керування 7 включає програмний блок 8, сигнали від якого перетворюються блоком 7 на керуючі команди і спрямовуються через блок 9 в блок 4. При цьому з блока комутації 9 по заданій програмі послідовно з заданим блоком 6 інтервалом часу у визначеному порядку подається напруга на блоки п'єзопластини 4 (фіг. 2). Як наслідок утворюється дискретний зсув оптичної осі пристрою в напрямку однієї з осей матриці. Аналогічно здійснюється зсув оптичної осі пристрою в напрямку другої осі матриці перпендикулярно першій. Пружинні блоки 5 забезпечують демпфування деформації пластин 4. Цикли зсуву оптичної осі на n позицій виконують послідовно у напрямку взаємно перпендикулярних осей фотоприймальної матриці. При кожному зсуві виконують експозицію, знімаючи об'єкт (через блоки 1,2, 3,6, 7,9). Після виконання підключення n пластин електричну напругу знімають і оптична вісь пристрою встановлюється у первісне положення. При зйомці з носія повторюють цикл за циклом, виконуючи 2n експозицій (пакет) для кожної ділянки місцевості з заданим перекриттям між пакетами кадрів об'єкта зйомки. Інформація, що приймається від об'єкта, попередньо опрацьовується в блоці 6. Зауважимо, що в блок 6 з блока 3 надходять електричні сигнали від засвічування пікселів ПЗЗ-матриці - від кожного піксела, в блоці 6 виконується ранжування і кодування цих сигналів. Цю опрацьовану інформацію спрямовують до блока дешифрування 10. В блоці 10 аналізують відповідно сигнали по кожному рядку і кожному стовпцю для n зсувів оптичної осі пристрою. Розглянемо порядок визначення рівня засвічування субпікселів у рядку в блоці 10. При n зсувах отримують n+1 субпікселів прямокутної форми. Припустимо, що n=1. На фіг. 3a показаний фрагмент рядка з 8 пікселів (№№ 1-8). Контролер блока 10 вирішує задачу - знайти групу рівносигнальних пікселів у рядку і вибирає групи суміжних рівносигнальних пікселів (не менше двох або трьох). Виконується порівняння значень електричних сигналів від засвічування пікселів в рядку. На фіг. 3 показані рівні сигналів, що умовно заповнюють кожний піксел штрихуванням. В даному випадку сигнали від пікселів 3,4, 5 мають рівну величину сигналу, яку можна визначити по шкалі сірого тону. В наведеному прикладі прийняті наступні рівні сигналів від засвічування пікселів (у відсотках максимальних рівнів): 1-100 %, 2-75 %, 3-50 %, 450 %, 5-50 %, 6-25 %, 7-50 %, 8-75 %. Після зсуву оптичної осі пристрою маємо зсув зображення на ПЗЗ-матриці на величину n 1 , де Р - лінійний розмір квадратного піксела. Наприклад при n=1 отримують сигнали від заcвічування тих же піксе 5 лів, але тепер вже зсунутих у напрямку лінії рядків на величину 2 . Представимо рівні цих сигналів як заповнені штрихуванням квадрати 0', 1', 2,' … 7' (фіг. 3b) з приблизними значеннями рівнів відповідних двом суміжним пікселам у ряді 1-8. Отримаємо у відсотках: 1' – 88 %, 2' – 62 %, 3' – 50 %, 4' – 50 %, 5' – 38 %, 6' – 38 %, 7' – 62 %. По даних сигналів в квадратах пікселів на фіг. 3а і 3б на фіг. 3в аналогічно можна сформувати рівні сигналів в прямокутниках з коротким боком 2 , позначені як 10', 11', 21', 22', 32', 33', 43', 44', 54', 55', 65', 66', 76', 77', 87'. Звернемо увагу, що на фіг. 3a рівносигнальну границю утворюють сигнали в квадратах 3,4, 5; на фіг. 3б в квадратах 3', 4' і на фіг. 3c - в прямокутниках 33', 43', 44', 54', кожний з яких дорівнює 50 % максимального рівня. Треба відзначити, що в рівносигнальній групі 33', 43', 44', 54' отримані значення і еквівалентність рівнів сигналів є більш точними і достовірними у порівнянні з іншими "напівпікселами" ряду. При цьому, чим більше є пікселів в рівносигнальних границях (у рядку, стовпцю) і більше таких границь, тим точніше результати визначення рівнів сигналів від усіх напівпікселів. Після цього, базуючись на рівносигнальній групі (33'-54'), визначають в блоці 10 рівні сигналів у всіх прямокутниках рядка (тобто у відповідних напівпікселах). При цьому контролюють отримані значення по інших рівносигнальних групах у даному рядку і при необхідності виконують обчислювальне урівнювання сигналів. По вищеописаній технології в блоці 10 визна чають (по сигналах в прямокутниках Р 2 ) сигнали , , в прямокутниках 4 16 32 і т. п. Аналогічно виконують поділ рівня сигналу по стовпцях фотоприймальної матриці і визначають сигнали від прямокутних напівпікселів. Таким чином в блоці 10 будуть визначені сигнали в напівпі кселах Р 2 по рядках і стовпцях. Розглянемо ситуацiю в окремому пікселі. На фіг. 4 показаний квадрат піксела з визначеними в блоці 10 сигналами в прямокутниках: u1=a+b;u2=c+d;u3=a+d;u4=b+c. Якщо квадрат (піксел), що розглядається, знаходиться в межах рівносигнальної групи (по рядках або стовпцях), наприклад, якщо u3=u4, то оче 95697 6 u1 u ;c d 2 2 2 , то по даних видним є те, що алгоритмах визначають рівні сигналів від засвічування чвертьпікселів a, b,c, d в пікселі рівносигнальної групи. За межами цієї групи по виміряних і визначених значеннях згаданих сигналів чвертьпікселів визначають рівні сигналів від заcвічування інших чвертьпікселів в рядках і стовпцях. Аналогічно в блоці 10 виконують розподіл сиг1 1 1 1 4 - до 16 , від 16 до 32 і так далі налу піксела від ab 2 2 на площах n при значеннях n=16,32 і т. п. Треба відзначити, що можна визначити сигнали субпікселів при непарному п. Після перетворень в блоці 10 сигналів пікселів в сигнали субпікселів останнім присвоюються відповідні новій (збільшеній) матриці номери і коди і передаються на вхід блока формування цифрового зображення 11, від якого спрямовують сигнали про формування зображення в блоці 6, а також зображення в блок 12 для запису і збереження. Таким чином, запропонований пристрій дистанційної зйомки дозволяє виконувати дистанційну зйомку і формування аерокосмічних зображень з підвищеною розрізнювальною здатністю за рахунок побудови субпіксельної аналізуючої матриці зображення. Джерела інформації:. 1. Савиных В.П., Цветков В.Я. Геоинформационный анализ данных дистанционного зондирования Земли. - М.: Картгеоцентр-Геодезидат, 2001.228 с. 2. Дорожинський О.Л. Основи фотограмметрії.Львів: Видавництво Національного університету "Львівська політехніка", 2003.-214 с. 3.Shiba H.Image registration method, image registration apparatus and recording medium/United States Patent No 6,434,279.- August13,2002. 4.Jackson W.B., Jared D.A., Basu S., Biegelsen D.K.Position sensitive detector based image conversion system capable of preserving subpixel information/United States Patent No 5,754,690.May19,1998. 5.Mendlovic D., Zalevsky Z., Konforti N., Marom E., Shabtay G., Levy U., Karako S.Super-resolving imaging system/United States Patent No 6,344,893.February 5,2002. 6.Waslowski K., Merettig G.Opto-electronic device and method for its operation/European Patent No1821120.-16.02.2007. 7 Комп’ютерна верстка І. Скворцова 95697 8 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for remote survey
Автори англійськоюBurachek Vsevolod Hermanovych, Zatserkovnyi Vitalii Ivanovych, Popov Mykhailo Oleksiiovych, Stankevych Serhii Arseniiovych
Назва патенту російськоюУстройство для дистанционной съемки
Автори російськоюБурачек Всеволод Германович, Зацерковный Виталий Иванович, Попов Михаил Алексеевич, Станкевич Сергей Арсениевич
МПК / Мітки
МПК: G01C 11/00
Мітки: зйомки, дистанційно, пристрій
Код посилання
<a href="https://ua.patents.su/4-95697-pristrijj-dlya-distancijjno-zjjomki.html" target="_blank" rel="follow" title="База патентів України">Пристрій для дистанційної зйомки</a>
Спосіб дистанційної зйомки

Номер патенту: 95696
Опубліковано: 25.08.2011
Автори: Станкевич Сергій Арсенійович, Попов Михайло Олексійович, Бурачек Всеволод Германович, Зацерковний Віталій Іванович
МПК: G01C 11/00
Мітки: спосіб, дистанційно, зйомки
Формула / Реферат:
Спосіб дистанційної зйомки аерокосмічних знімків, що ґрунтується на субпіксельній технології, який відрізняється тим, що при зйомці виконують кутове зміщення оптичної осі знімального приладу по напрямку рядків і стовпців фотоприймача матриці на кількість позицій з інтервалом: ,де:
Спосіб коригування результатів спектрального аналізу матеріалів дистанційної зйомки грунту

Номер патенту: 19604
Опубліковано: 15.12.2006
Автори: Ачасов Андрій Борисович, Бідолах Дмитро Ілліч
МПК: G01C 11/00
Мітки: коригування, результатів, дистанційно, матеріалів, спектрального, аналізу, грунту, спосіб, зйомки
Формула / Реферат:
Спосіб коригування результатів спектрального аналізу матеріалів дистанційної зйомки ґрунту, що включає дистанційне знімання ґрунтових поверхонь, відбір зразків з верхнього шару ґрунту з прив'язкою місць відбору за допомогою GPS-приймача до глобальної системи координат, який відрізняється тим, що на прив'язаному космічному знімку по кожній точці відбору зразків комп'ютерно визначають значення яскравостей еталона на знімку по трьох спектральних...
Пристрій для дистанційної індикації відстані між гостряком і рамною рейкою стрілочного переводу
Номер патенту: 69811
Опубліковано: 15.09.2004
Автори: Аніщенко Михайло В'ячеславович, Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: гостряком, відстані, рейкою, пристрій, стрілочного, індикації, рамною, дистанційно, переводу
Формула / Реферат:
Пристрій для дистанційної індикації відстані між гостряком і рамною рейкою стрілочного переводу, який містить встановлений біля електроприводу автогенератор, живлячий індуктивний датчик переміщення гостряка, вихід якого через підсилювач, перетворювач, передаючий узгоджувальний пристрій, лінію живлення електроприводу, приймальний узгоджувальний пристрій підключений до компаратора і цифрового індикатора, який відрізняється тим, що на вихід...
Пристрій дистанційної діагностики технічного стану складних електронних систем

Номер патенту: 18478
Опубліковано: 15.11.2006
Автори: Синєглазов Віктор Михайлович, Клебанівський Сергій Володимирович, Зеленков Олександр Аврамович, Сидоренко Костянтин Миколайович, Голік Артур Петрович, Соченко Петро Степанович
МПК: G01R 27/02
Мітки: електронних, діагностики, дистанційно, систем, складних, пристрій, технічного, стану
Формула / Реферат:
1. Пристрій дистанційної діагностики технічного стану m складних електронних систем, який містить n пар послідовно з'єднаних резисторів навантаження та еталонних резисторів, який відрізняється тим, що в складній і-й електронній системі одного із m об'єктів контролю виділяється комплект із n відповідальних вузлів, в яких відповідно виділені n існуючих резисторів навантаження, до яких послідовно підключені n еталонних активних опорів, введений...
Пристрій для проведення цифрової інтраоральної зйомки об’єктів порожнини рота
Номер патенту: 83713
Опубліковано: 11.08.2008
Автори: Шамаев Віталій Віталійович, Удод Олександр Анатолійович
МПК: A61C 19/00
Мітки: об'єктів, пристрій, проведення, цифрової, інтраоральної, порожнини, зйомки, рота
Формула / Реферат:
1. Пристрій для проведення цифрової інтраоральної зйомки, який включає відеокамеру, розташовану в корпусі, оптичний інтраоральний зонд з віконцем для прийому зображення, який включає оптоволоконний світловод для передачі відеозображення на відеокамеру та оптоволоконний світловод освітлювача, блок живлення, фізичні канали зв'язку передачі інформації на комп'ютер, який відрізняється тим, що додатково має знімний освітлювач, виконаний у вигляді...
Попередній патент: Спосіб дистанційної зйомки
Наступний патент: Барокомпенсований електрохімічний вимірювальний газоаналізатор (варіанти)
Випадковий патент: Процес одержання порошків оксидів