Системи та способи для заглушення потенційної нестабільності кадру
Номер патенту: 115350
Опубліковано: 25.10.2017
Автори: Раджендран Вівек, Субасінгха Субасінгха Шамінда, Крішнан Венкатеш
Формула / Реферат
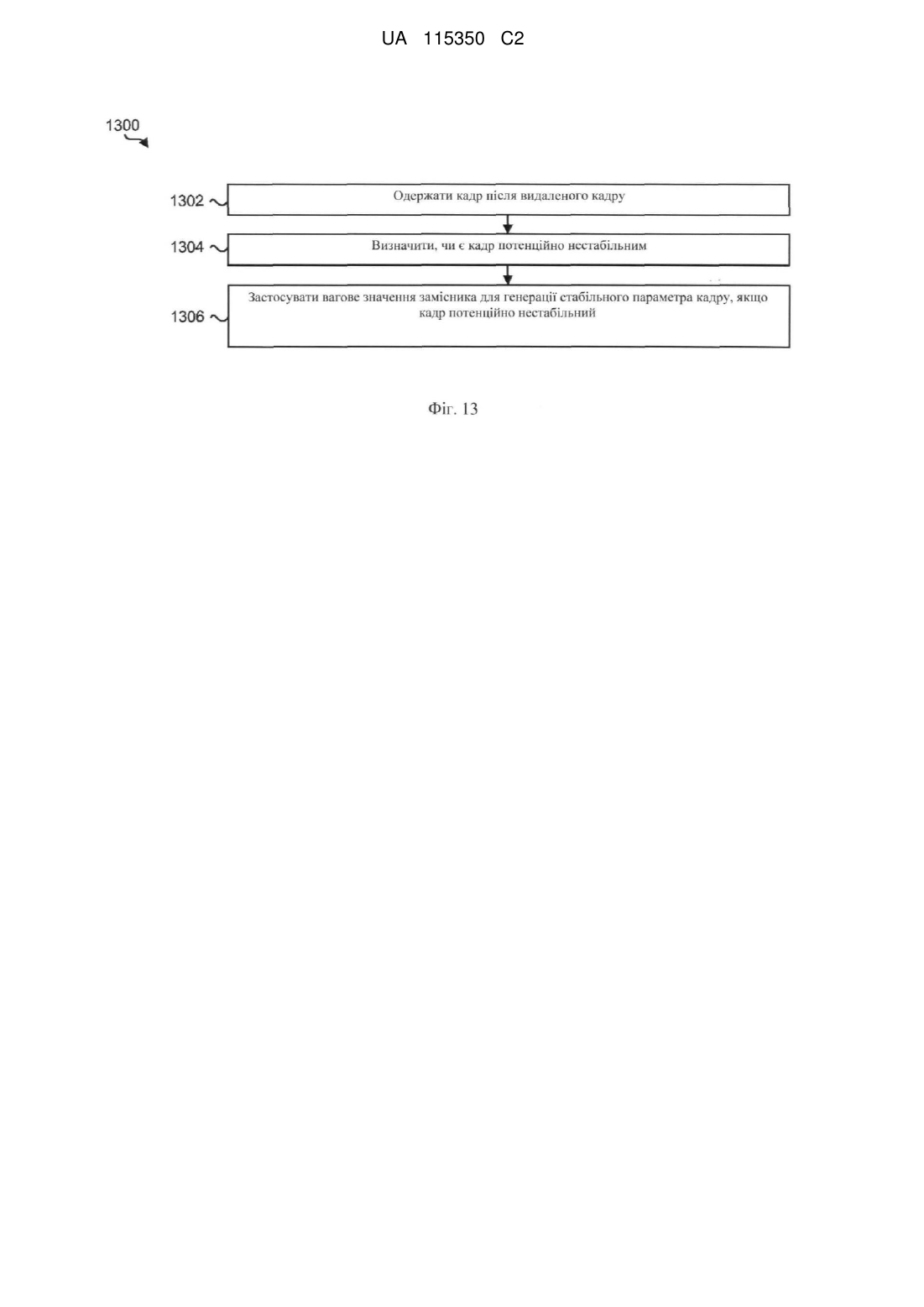
1. Спосіб заглушення потенційної нестабільності кадру електронним пристроєм, який включає етапи, на яких:
одержують перший кадр мовного сигналу, наступний за часом за видаленим кадром; причому перший кадр є правильно прийнятим кадром;
деквантують квантований кінцевий вектор лінійної спектральної частоти першого кадру для формування кінцевого вектора лінійної спектральної частоти першого кадру;
визначають, чи є перший кадр потенційно нестабільним, причому потенційно нестабільний кадр має одну або більше характеристик, які вказують небезпеку формування мовного артефакту; і
застосовують вагове значення замісника, замість прийнятого вагового вектора, до кінцевого вектора лінійної спектральної частоти першого кадру для генерації стабільного параметра кадру, у відповідь на визначення того, що кадр потенційно нестабільний, причому стабільний параметр кадру є проміжним вектором лінійної спектральної частоти кадру між векторами лінійної спектральної частоти підкадрів.
2. Спосіб за п. 1, який додатково включає етап, на якому інтерполюють множину векторів лінійної спектральної частоти підкадрів на основі проміжного вектора лінійної спектральної частоти кадру.
3. Спосіб за п. 1, який додатково включає етап, на якому застосовують прийнятий ваговий вектор для генерації проміжного вектора лінійної спектральної частоти поточного кадру.
4. Спосіб за п. 1, в якому вагове значення замісника становить від 0 до 1.
5. Спосіб за п. 1, в якому генерація стабільного параметра кадру містить застосування вагового значення замісника до кінцевого вектора лінійної спектральної частоти поточного кадру і кінцевого вектора лінійної спектральної частоти попереднього кадру.
6. Спосіб за п. 1, в якому генерація стабільного параметра кадру містить визначення проміжного вектора лінійної спектральної частоти замісника поточного кадру, який рівний добутку кінцевого вектора лінійної спектральної частоти поточного кадру і вагового значення замісника плюс добуток кінцевого вектора лінійної спектральної частоти попереднього кадру і різниці одиниці і вагового значення замісника.
7. Спосіб за п. 1, в якому вагове значення замісника вибирається на основі щонайменше однієї з класифікації двох кадрів і різниці лінійних спектральних частот між двома кадрами.
8. Спосіб за п. 1, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи впорядкована проміжна лінійна спектральна частота поточного кадру відповідно до правила до будь-якого перевпорядкування.
9. Спосіб за п. 1, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи знаходиться кадр в межах порогової кількості кадрів після видаленого кадру.
10. Спосіб за п. 1, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи використовує який-небудь кадр між кадром і видаленим кадром квантування без прогнозування.
11. Електронний пристрій для заглушення потенційної нестабільності кадру, який містить:
схему визначення параметра кадру, виконану з можливістю одержувати перший кадр мовного сигналу, наступний за часом за видаленим кадром, причому перший кадр є правильно прийнятим кадром;
схему блока зворотного квантування, підключену до схеми визначення параметра кадру, причому схема блока зворотного квантування виконана з можливістю деквантувати квантований кінцевий вектор лінійної спектральної частоти першого кадру для формування кінцевого вектора лінійної спектральної частоти першого кадру;
схему визначення стабільності, підключену до схеми визначення параметра кадру, причому схема визначення стабільності виконана з можливістю визначати, чи є перший кадр потенційно нестабільним, причому потенційно нестабільний кадр має одну або більше характеристик, які вказують небезпеку формування мовного артефакту; і
схему заміщення вагового значення, підключену до схеми визначення стабільності, причому схема заміщення вагового значення виконана з можливістю застосовувати вагове значення замісника, замість прийнятого вагового вектора, до кінцевого вектора лінійної спектральної частоти першого кадру для генерації стабільного параметра кадру, у відповідь на визначення того, що кадр потенційно нестабільний, причому стабільний параметр кадру є проміжним вектором лінійної спектральної частоти кадру між векторами лінійної спектральної частоти підкадрів.
12. Електронний пристрій за п. 11, який додатково містить схему інтерполяції, виконану з можливістю інтерполювати множину векторів лінійної спектральної частоти підкадрів на основі проміжного вектора лінійної спектральної частоти кадру.
13. Електронний пристрій за п. 11, в якому схема визначення параметра кадру виконана з можливістю застосовувати прийнятий ваговий вектор для генерації проміжного вектора лінійної спектральної частоти поточного кадру.
14. Електронний пристрій за п. 11, в якому вагове значення замісника становить від 0 до 1.
15. Електронний пристрій за п. 11, в якому генерація стабільного параметра кадру включає застосування вагового значення замісника до кінцевого вектора лінійної спектральної частоти поточного кадру і кінцевого вектора лінійної спектральної частоти попереднього кадру.
16. Електронний пристрій за п. 11, в якому генерація стабільного параметра кадру включає визначення проміжного вектора лінійної спектральної частоти замісника поточного кадру, який рівний добутку кінцевого вектора лінійної спектральної частоти поточного кадру і вагового значення замісника плюс добуток кінцевого вектора лінійної спектральної частоти попереднього кадру і різниці одиниці і вагового значення замісника.
17. Електронний пристрій за п. 11, в якому вагове значення замісника вибирається на основі щонайменше однієї з класифікації двох кадрів і різниці лінійних спектральних частот між двома кадрами.
18. Електронний пристрій за п. 11, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи впорядкована проміжна лінійна спектральна частота поточного кадру відповідно до правила до будь-якого перевпорядкування.
19. Електронний пристрій за п. 11, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи знаходиться кадр в межах порогової кількості кадрів після видаленого кадру.
20. Електронний пристрій за п. 11, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи використовує який-небудь кадр між кадром і видаленим кадром квантування без прогнозування.
21. Комп'ютерно-зчитуваний носій, на якому зберігаються інструкції, які при виконанні приписують електронному пристрою:
одержувати перший кадр мовного сигналу, наступний за часом за видаленим кадром, причому кадр є правильно прийнятим кадром;
визначати, чи є кадр потенційно нестабільним, причому потенційно нестабільний кадр має одну або більше характеристик, які вказують небезпеку формування мовного артефакту; і
застосовувати вагове значення замісника, замість прийнятого вагового вектора, до кінцевого вектора лінійної спектральної частоти першого кадру для генерації стабільного параметра кадру, у відповідь на визначення того, що кадр потенційно нестабільний, причому стабільний параметр кадру є проміжним вектором лінійної спектральної частоти кадру між векторами лінійної спектральної частоти підкадрів.
22. Комп'ютерно-зчитуваний носій за п. 21, причому при виконанні інструкції додатково приписують електронному пристрою інтерполювати множину векторів лінійної спектральної частоти підкадрів на основі проміжного вектора лінійної спектральної частоти кадру.
23. Комп'ютерно-зчитуваний носій за п. 21, причому при виконанні інструкції додатково приписують електронному пристрою застосовувати прийнятий ваговий вектор для генерації проміжного вектора лінійної спектральної частоти поточного кадру.
24. Комп'ютерно-зчитуваний носій за п. 21, в якому вагове значення замісника становить від 0 до 1.
25. Комп'ютерно-зчитуваний носій за п. 21, в якому генерація стабільного параметра кадру включає застосування вагового значення замісника до кінцевого вектора лінійної спектральної частоти поточного кадру і кінцевого вектора лінійної спектральної частоти попереднього кадру.
26. Комп'ютерно-зчитуваний носій за п. 21, в якому генерація стабільного параметра кадру включає визначення проміжного вектора лінійної спектральної частоти замісника поточного кадру, який рівний добутку кінцевого вектора лінійної спектральної частоти поточного кадру і вагового значення замісника плюс добуток кінцевого вектора лінійної спектральної частоти попереднього кадру і різниці одиниці і вагового значення замісника.
27. Комп'ютерно-зчитуваний носій за п. 21, в якому вагове значення замісника вибирається на основі щонайменше однієї з класифікації двох кадрів і різниці лінійних спектральних частот між двома кадрами.
28. Комп'ютерно-зчитуваний носій за п. 21, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи впорядкована проміжна лінійна спектральна частота поточного кадру відповідно до правила до будь-якого перевпорядкування.
29. Комп'ютерно-зчитуваний носій за п. 21, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи знаходиться кадр в межах порогової кількості кадрів після видаленого кадру.
30. Комп'ютерно-зчитуваний носій за п. 21, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи використовує який-небудь кадр між кадром і видаленим кадром квантування без прогнозування.
31. Пристрій для заглушення потенційної нестабільності кадру, який містить:
засіб для одержання першого кадру мовного сигналу, наступного за часом за видаленим кадром, причому перший кадр є правильно прийнятим кадром;
засіб для деквантування квантованого кінцевого вектора лінійної спектральної частоти першого кадру для формування кінцевого вектора лінійної спектральної частоти першого кадру;
засіб для визначення, чи є перший кадр потенційно нестабільним, причому потенційно нестабільний кадр має одну або більше характеристик, які вказують небезпеку формування мовного артефакту; і
засіб для застосування вагового значення замісника, замість прийнятого вагового вектора, до кінцевого вектора лінійної спектральної частоти першого кадру для генерації стабільного параметра кадру, у відповідь на визначення того, що кадр потенційно нестабільний, причому стабільний параметр кадру є проміжним вектором лінійної спектральної частоти кадру між векторами лінійної спектральної частоти підкадрів.
32. Пристрій за п. 31, який додатково містить засіб для інтерполяції множини векторів лінійної спектральної частоти підкадрів на основі проміжного вектора лінійної спектральної частоти кадру.
33. Пристрій за п. 31, який додатково містить засіб для застосування прийнятого вагового вектора для генерації проміжного вектора лінійної спектральної частоти поточного кадру.
34. Пристрій за п. 31, в якому вагове значення замісника становить від 0 до 1.
35. Пристрій за п. 31, в якому генерація стабільного параметра кадру включає застосування вагового значення замісника до кінцевого вектора лінійної спектральної частоти поточного кадру і кінцевого вектора лінійної спектральної частоти попереднього кадру.
36. Пристрій за п. 31, в якому генерація стабільного параметра кадру включає визначення проміжного вектора лінійної спектральної частоти замісника поточного кадру, який рівний добутку кінцевого вектора лінійної спектральної частоти поточного кадру і вагового значення замісника плюс добуток кінцевого вектора лінійної спектральної частоти попереднього кадру і різниці одиниці і вагового значення замісника.
37. Пристрій за п. 31, в якому вагове значення замісника вибирається на основі щонайменше однієї з класифікації двох кадрів і різниці лінійних спектральних частот між двома кадрами.
38. Пристрій за п. 31, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи впорядкована проміжна лінійна спектральна частота поточного кадру відповідно до правила до будь-якого перевпорядкування.
39. Пристрій за п. 31, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи знаходиться кадр в межах порогової кількості кадрів після видаленого кадру.
40. Пристрій за п. 31, в якому визначення, чи є кадр потенційно нестабільним, здійснюється на основі того, чи використовує який-небудь кадр між кадром і видаленим кадром квантування без прогнозування.
Текст
Реферат: Описаний спосіб заглушення потенційної нестабільності кадру електронним пристроєм. Спосіб включає в себе одержання кадру, наступного за часом за видаленим кадром. Спосіб також включає в себе визначення, чи є кадр потенційно нестабільним. Спосіб додатково включає в себе застосування вагового значення замісника для генерації стабільного параметра кадру, якщо кадр потенційно нестабільний. UA 115350 C2 (12) UA 115350 C2 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 Спорідненні заявки [0001] Дана заявка належить до і заявляє пріоритет за попередньою заявкою на патент США № 61/767,431, поданою 21 лютого 2013 р., під назвою "SYSTEMS AND METHODS FOR CORRECTING А POTENTIAL LINE SPECTRAL FREQUENCY INSTABILITY". Галузь техніки, до якої належить винахід [0002] Даний винахід стосується, в цілому, електронних пристроїв. Зокрема, даний винахід стосується систем та способів для заглушення потенційної нестабільності кадру. Рівень техніки [0003] В останні декілька десятиріч стали широко використовуватися електронні пристрої. Зокрема, розвиток електронної технології призвів до зниження вартості все більш складних і корисних електронних пристроїв. Зниження вартості і потреби споживача сприяли використанню електронних пристроїв, що призвело до їх практично повсюдного поширення в сучасному суспільстві. По мірі розширення використання електронних пристроїв, потрібні нові та вдосконалені ознаки електронних пристроїв. Зокрема, електронні пристрої, які здійснюють нові функції і/або які здійснюють функції швидше, більш ефективно або з більш високою якістю, користуються підвищеним попитом. [0004] Деякі електронні пристрої (наприклад, стільникові телефони, смартфони, пристрої звукозапису, побутові відеокамери, комп'ютери тощо) використовують аудіосигнали. Ці електронні пристрої можуть кодувати, зберігати і/або передавати аудіосигнали. Наприклад, смартфон може одержувати, кодувати і передавати мовний сигнал для телефонного виклику, тоді як інший смартфон може приймати і декодувати мовний сигнал. [0005] Однак при кодуванні, передачі і декодуванні аудіосигналів виникають конкретні проблеми. Наприклад, аудіосигнал можна кодувати для скорочення величини смуги необхідної для передачі аудіосигналу. Коли частина аудіосигналу втрачається при передачі, може бути складно точно представляти декодований аудіосигнал. З цього розгляду виходить, що можуть бути корисні системи та способи, поліпшуючі декодування. Суть винаходу [0006] Описаний спосіб заглушення потенційної нестабільності кадру електронним пристроєм. Спосіб включає в себе одержання кадру, наступного за часом за видаленим кадром. Спосіб також включає в себе визначення, чи є кадр потенційно нестабільним. Спосіб додатково включає в себе застосування вагового значення замісника для генерації стабільного параметра кадру, якщо кадр потенційно нестабільний. Параметром кадру може бути проміжний вектор лінійної спектральної частоти кадру. Спосіб може включати в себе застосування прийнятого вагового вектора для генерації проміжного вектора лінійної спектральної частоти поточного кадру. [0007] Вагове значення замісника може бути вміщене між 0 та 1. Генерація стабільного параметра кадру може включати в себе застосування вагового значення замісника до кінцевого вектора лінійної спектральної частоти поточного кадру і кінцевого вектора лінійної спектральної частоти попереднього кадру. Генерація стабільного параметра кадру може включати в себе визначення проміжного вектора лінійної спектральної частоти замісника поточного кадру, який рівний добутку кінцевого вектора лінійної спектральної частоти поточного кадру і вагового значення замісника плюс добуток кінцевого вектора лінійної спектральної частоти попереднього кадру і різниці одиниці і вагового значення замісника. Вагове значення замісника можна вибирати на основі щонайменше однієї з класифікації двох кадрів і різниці лінійних спектральних частот між двома кадрами. [0008] Визначення, чи є кадр потенційно нестабільним, може здійснюватися на основі того, чи впорядкована проміжна лінійна спектральна частота поточного кадру відповідно до правила до будь-якого перевпорядкування. Визначення, чи є кадр потенційно нестабільним, може здійснюватися на основі того, чи знаходиться кадр в межах порогової кількості кадрів після видаленого кадру. Визначення, чи є кадр потенційно нестабільним, може здійснюватися на основі того, чи використовує який-небудь кадр між кадром і видаленим кадром квантування без прогнозування. [0009] Описаний також електронний пристрій длязаглушення потенційної нестабільності кадру. Електронний пристрій включає в себе схему визначення параметра кадру, яка одержує кадр, наступний за часом за видаленим кадром. Електронний пристрій також включає в себе схему визначення стабільності, підключену до схеми визначення параметра кадру. Схема визначення стабільності визначає, чи є кадр потенційно нестабільним. Електронний пристрій додатково включає в себе схему заміщення вагового значення, підключену до схеми визначення стабільності. Схема заміщення вагового значення застосовує вагове значення замісника для генерації стабільного параметра кадру, якщо кадр потенційно нестабільний. 1 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 [0010] Описаний також комп'ютерний програмний продукт для заглушення потенційної нестабільності кадру. Комп'ютерний програмний продукт включає в себе нетранзиторний матеріальний комп'ютерно-зчитуваний носій з інструкціями. Інструкції включають в себе код, що приписує електронному пристрою одержувати кадр, наступний за часом за видаленим кадром. Інструкції також включають в себе код, що приписує електронному пристрою визначати, чи є кадр потенційно нестабільним. Інструкції додатково включають в себе код, що приписує електронному пристрою застосовувати вагове значення замісника для генерації стабільного параметра кадру, якщо кадр потенційно нестабільний. [0011] Описаний також пристрій для заглушення потенційної нестабільності кадру. Пристрій включає в себе засіб для одержання кадру, наступного за часом за видаленим кадром. Пристрій також включає в себе засіб для визначення, чи є кадр потенційно нестабільним. Пристрій додатково включає в себе засіб для застосування вагового значення замісника для генерації стабільного параметра кадру, якщо кадр потенційно нестабільний. Короткий опис креслень [0012] Фіг. 1 - блок-схема, що демонструє загальний приклад кодера і декодера; [0013] Фіг. 2 - блок-схема, що демонструє приклад базової реалізації кодера і декодера; [0014] Фіг. 3 - блок-схема, що демонструє приклад широкосмугового мовного кодера і широкосмугового мовного декодера; [0015] Фіг. 4 - блок-схема, що демонструє більш конкретний приклад кодера; [0016] Фіг. 5 - схема, що демонструє приклад кадрів залежно від часу; [0017] Фіг. 6 - блок-схема операцій, що демонструє одну конФігурацію способу кодування мовного сигналу кодером; [0018] Фіг. 7 - схема, що демонструє приклад визначення вектора лінійної спектральної частоти (LSF); [0019] Фіг. 8 включає в себе дві схеми, що демонструють приклади інтерполяції та екстраполяції LSF; [0020] Фіг. 9 - блок-схема операцій, що демонструє одну конФігурацію способу декодування кодованого мовного сигналу декодером; [0021] Фіг. 10 - схема, що демонструє один приклад кластеризованих вимірювань LSF; [0022] Фіг. 11 - графік, що демонструє приклад артефактів внаслідок кластеризованих вимірювань LSF; [0023] Фіг. 12 - блок-схема, що демонструє одну конФігурацію електронного пристрою, виконаного з можливістю заглушення потенційної нестабільності кадру; [0024] Фіг. 13 - блок-схема операцій, що демонструє одну конФігурацію способу заглушення потенційної нестабільності кадру; [0025] Фіг. 14 - блок-схема операцій, що демонструє більш конкретну конФігурацію способу заглушення потенційної нестабільності кадру; [0026] Фіг. 15 - блок-схема операцій, що демонструє іншу більш конкретну конФігурацію способу заглушення потенційної нестабільності кадру; [0027] Фіг. 16 - блок-схема операцій, що демонструє іншу більш конкретну конФігурацію способу заглушення потенційної нестабільності кадру; [0028] Фіг. 17 - графік, що демонструє приклад синтезованого мовного сигналу; [0029] Фіг. 18 - блок-схема, що демонструє одну конФігурацію пристрою бездротового зв'язку, в якому можна реалізувати системи та способи для заглушення потенційної нестабільності кадру; і [0030] Фіг. 19 демонструє різні компоненти, які можна використовувати в електронному пристрої. Докладний опис [0031] Різні конФігурації описані нижче з посиланням на Фігури, де аналогічні посилальні позиції можуть вказувати функціонально схожі елементи. Системи та способи, описані і проілюстровані в цілому тут на Фігурах, можуть бути сконструйовані в найрізноманітніших конФігураціях. Таким чином, нижченаведений більш докладний опис декількох конФігурацій, представлених на Фігурах, не покликаний обмежувати обсяг заявленого винаходу, але лише представляє системи та способи. [0032] На Фіг. 1 показана блок-схема, що демонструє загальний приклад кодера 104 і декодера 108. Кодер 104 приймає мовний сигнал 102. Мовний сигнал 102 може бути мовним сигналом у будь-якому діапазоні частот. Наприклад, мовний сигнал 102 може бути сигналом повної смуги з приблизним діапазоном частот 0-24 кілогерц (кГц), надширокосмуговим сигналом з приблизним діапазоном частот 0-16 кГц, широкосмуговим сигналом з приблизним діапазоном частот 0-8 кГц, вузькосмуговим сигналом з приблизним діапазоном частот 0-4 кГц, сигналом 2 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 нижньої смуги з приблизним діапазоном частот 50-300 герц (Гц) або сигналом верхньої смуги з приблизним діапазоном частот 4-8 кГц. Інші можливі діапазони частот для мовного сигналу 102 включають в себе 300-3400 Гц (наприклад, діапазон частот комутованої телефонної мережі загального користування (PSTN)), 14-20 кГц, 16-20 кГц та 16-32 кГц. У деяких конФігураціях, мовний сигнал 102 може дискретизуватися з частотою 16 кГц і може мати приблизний діапазон частот 0-8 кГц. [0033] Кодер 104 кодує мовний сигнал 102 для формування кодованого мовного сигналу 106. У загальному випадку, кодований мовний сигнал 106 включає в себе один або більше параметрів, які представляють мовний сигнал 102. Один або більше з параметрів можна квантувати. Приклади одного або більше параметрів включають в себе параметри фільтрації (наприклад, вагові коефіцієнти, лінійні спектральні частоти (LSF), лінійні спектральні пари (LSP), спектральні частоти імітансу (ISF), спектральні пари імітансу (ISP), коефіцієнти часткової кореляції (PARCOR), коефіцієнти відображення і/або значення логарифмічного відношення площ тощо) і параметри, включені в кодований сигнал збудження (наприклад, коефіцієнти посилення, індекси адаптивної кодової книги, коефіцієнти посилення адаптивної кодової книги, індекси фіксованої кодової книги і/або коефіцієнти посилення фіксованої кодової книги тощо). Параметри можуть відповідати одній або більше смугам частот. Декодер 108 декодує кодований мовний сигнал 106 для формування декодованого мовного сигналу 110. Наприклад, декодер 108 будує декодований мовний сигнал 110 на основі одного або більше параметрів, включених в кодований мовний сигнал 106. Декодований мовний сигнал 110 може бути наближеним відтворенням вихідного мовного сигналу 102. [0034] Кодер 104 можна реалізувати в обладнанні (наприклад, схемі), програмному забезпеченні або їх комбінації. Наприклад, кодер 104 можна реалізувати у вигляді спеціалізованої інтегральної схеми (ASIC) або у вигляді процесора з інструкціями. Аналогічно, декодер 108 можна реалізувати в обладнанні (наприклад, схемі), програмному забезпеченні або їх комбінації. Наприклад, декодер 108 можна реалізувати у вигляді спеціалізованої інтегральної схеми (ASIC) або у вигляді процесора з інструкціями. Кодер 104 і декодер 108 можна реалізувати на окремих електронних пристроях або на одному і тому самому електронному пристрої. [0035] На Фіг. 2 показана блок-схема, що демонструє приклад базової реалізації кодера 204 і декодера 208. Кодер 204 може бути одним прикладом кодера 104, описаним в зв'язку з Фіг. 1. Кодер 204 може включати в себе модуль 212 аналізу, перетворення 214 коефіцієнтів, блок 216 квантування А, блок 218 зворотного квантування А, зворотне перетворення 220 коефіцієнтів А, аналізуючий фільтр 222 і блок 224 квантування B. Один або більше з компонентів кодера 204 і/або декодера 208 можна реалізувати в обладнанні (наприклад, схемі), програмному забезпеченні або їх комбінації. [0036] Кодер 204 приймає мовний сигнал 202. Потрібно зазначити, що мовний сигнал 202 може включати в себе будь-який діапазон частот, як описано вище в зв'язку з Фіг. 1 (наприклад, всю смугу мовних частот або піддіапазон мовних частот). [0037] У цьому прикладі, модуль 212 аналізу кодує спектральну обвідну мовного сигналу 202 як набір коефіцієнтів лінійного прогнозування (LP) (наприклад, коефіцієнти А(z) аналізуючого фільтра, які можна застосовувати для формування всеполюсного синтезуючого фільтра 1/А(z), де z-комплексне число). Модуль 212 аналізу звичайно обробляє вхідний сигнал як послідовність неперекривних кадрів мовного сигналу 202, причому новий набір коефіцієнтів обчислюється для кожного кадру або підкадру. У деяких конФігураціях, період кадру може бути періодом, протягом якого можна чекати, що мовний сигнал 202 є локально стаціонарним. Один загальний приклад періоду кадру становить 20 мілісекунд (мс) (еквівалентно, наприклад, 160 вибіркам при частоті дискретизації 8 кГц). В одному прикладі, модуль 212 аналізу виконаний з можливістю обчислення набору з десяти коефіцієнтів лінійного прогнозування для характеризації формантної структури кожного 20-мс кадру. Можна також реалізувати модуль 212 аналізу для обробки мовного сигналу 202 як послідовності перекривних кадрів. [0038] Модуль 212 аналізу може бути виконаний з можливістю безпосереднього аналізу вибірок кожного кадру, або вибірки спочатку можуть зважуватися згідно з вирізувальною функцією (наприклад, зважувальною функції Хеммінга). Аналіз також може здійснюватися в межах вікна, що перевищує кадр, наприклад 30-мс вікна. Це вікно може бути симетричним (наприклад, 5-20-5, тобто таким, що включає в себе 5 мілісекунд безпосередньо до і після 20мілісекундного кадру) або асиметричним (наприклад, 10-20, тобто таким, що включає в себе останні 10 мілісекунд попереднього кадру). Модуль 212 аналізу звичайно виконаний з можливістю обчислення коефіцієнтів лінійного прогнозування з використанням рекурсії Левінсона-Дурбіна або алгоритму Леру-Гогена. В іншій реалізації модуль аналізу може бути 3 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 виконаний з можливістю обчислення набору кепстральних коефіцієнтів для кожного кадру замість набору коефіцієнтів лінійного прогнозування. [0039] Вихідну швидкість кодера 204 можна значно знизити без особливої шкоди для якості відтворення, за допомогою квантування коефіцієнтів. Коефіцієнти лінійного прогнозування складно ефективно квантувати і звичайно відображаються в інше представлення, наприклад LSF, для квантування і/або ентропійного кодування. У прикладі, наведеному на Фіг. 2, перетворення 214 коефіцієнтів перетворює набір коефіцієнтів у відповідний вектор LSF (наприклад, набір вимірювань LSF). Інші взаємно-однозначні представлення коефіцієнтів включають в себе LSP, коефіцієнти PARCOR, коефіцієнти відображення, значення логарифмічного відношення площ, ISP та ISF. Наприклад, ISF можна використовувати в AMRWB (адаптивному багатошвидкісному широкосмуговому) кодеку GSM (глобальної системи мобільного зв'язку). Для зручності, термін "лінійні спектральні частоти", "вимірювання LSF", "вектори LSF" і споріднені терміни можна використовувати відносно одного або більше з LSF, LSP, ISF, ISP, коефіцієнтів PARCOR, коефіцієнтів відображення і значень логарифмічного відношення площ. Звичайно перетворення між набором коефіцієнтів і відповідним вектором LSF зворотне, але деякі конФігурації можуть включати в себе реалізації кодера 204, в яких перетворення неможливо звернути без помилки. [0040] Блок 216 квантування А виконаний з можливістю квантування вектора LSF (або іншого представлення коефіцієнтів). Кодер 204 може виводити результат цього квантування у вигляді параметрів 228 фільтрації. Блок 216 квантування А звичайно включає в себе блок квантування вектора, який кодує вхідний вектор (наприклад, вектор LSF) як індекс відповідного запису вектора в таблиці або кодовій книзі. [0041] Як випливає з Фіг. 2, кодер 204 також генерує залишковий сигнал, пропускаючи мовний сигнал 202 через аналізуючий фільтр 222 (який також іменується вибілювальним фільтром або фільтром помилок прогнозування), сконФігурований згідно з набором коефіцієнтів. Аналізуючий фільтр 222 можна реалізувати як фільтр з кінцевою імпульсною характеристикою (FIR) або фільтр з нескінченною імпульсною характеристикою (IIR). Цей залишковий сигнал звичайно містить перцепційно важливу інформацію мовного кадру, наприклад, довготривалу структуру, що належить до основного тону, яка не представлена в параметрах 228 фільтрації. Блок 224 квантування В виконаний з можливістю обчислення квантованого представлення цього залишкового сигналу для виведення як кодованого сигналу 226 збудження. У деяких конФігураціях, блок 224 квантування В включає в себе блок квантування вектора, який кодує вхідний вектор як індекс відповідного запису вектора в таблиці або кодовій книзі. Додатково або альтернативно, блок 224 квантування В може бути виконаний з можливістю відправки одного або більше параметрів, з яких на декодері може динамічно генеруватися вектор, замість того, щоб витягувати їх зі сховища, як в способі розрідженої кодової книги. Такий спосіб використовується в таких схемах кодування, як алгебраїчне CELP (лінійне прогнозування з кодовим збудженням) і в таких кодеках, як EVRC (поліпшений кодек змінної швидкості) 3GPP2 (проекту партнерства третього покоління 2). У деяких конФігураціях, кодований сигнал 226 збудження і параметри 228 фільтрації можуть бути включені в кодований мовний сигнал 106. [0042] Може бути корисним, щоб кодер 204 генерував кодований сигнал 226 збудження згідно з тими самими значеннями параметрів фільтрації, які будуть доступні відповідному декодеру 208. Таким чином, результуючий кодований сигнал 226 збудження може вже до деякої міри враховувати відхилення від ідеалу в цих значеннях параметрів, наприклад помилку квантування. Відповідно, може бути корисним конФігурувати аналізуючий фільтр 222 з використанням тих самих значень коефіцієнтів, які будуть доступні на декодері 208. У базовому прикладі кодера 204, проілюстрованому на Фіг. 2, блок 218 зворотного квантування А деквантує параметри 228 фільтрації. Зворотне перетворення 220 коефіцієнтів А відображає результуючі значення зворотно у відповідний набір коефіцієнтів. Цей набір коефіцієнтів використовується для конФігурування аналізуючого фільтра 222 для генерації залишкового сигналу, квантованого блоком 224 квантування В. [0043] Деякі реалізації кодера 204 виконані з можливістю обчислення кодованого сигналу 226 збудження шляхом ідентифікації одного з набору векторів кодової книги, який найкращим чином узгоджується із залишковим сигналом. Зазначимо, однак, що кодер 204 можна також реалізувати для обчислення квантованого представлення залишкового сигналу без фактичної генерації залишкового сигналу. Наприклад, кодер 204 може бути виконаний з можливістю використання декількох векторів кодової книги для генерації відповідних синтезованих сигналів (згідно з, наприклад, поточним набором параметрів фільтрації) і вибору вектора кодової книги, 4 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 зв'язаного зі згенерованим сигналом, який найкращим чином узгоджується з вихідним мовним сигналом 202 в перцепційно зваженій ділянці. [0044] Декодер 208 може включати в себе блок 230 зворотного квантування В, блок 236 зворотного квантування С, зворотне перетворення 238 коефіцієнтів В і синтезуючий фільтр 234. Блок 236 зворотного квантування С деквантує параметри 228 фільтрації (наприклад, вектор LSF), і зворотне перетворення 238 коефіцієнтів В перетворює вектор LSF в набір коефіцієнтів (наприклад, як описано вище з посиланням на блок 218 зворотного квантування А і зворотне перетворення 220 коефіцієнтів А кодера 204). Блок 230 зворотного квантування В деквантує кодований сигнал 226 збудження для формування сигналу 232 збудження. На основі коефіцієнтів і сигналу 232 збудження, синтезуючий фільтр 234 синтезує декодований мовний сигнал 210. Іншими словами, синтезуючий фільтр 234 виконаний з можливістю формування спектра сигналу 232 збудження згідно з деквантованими коефіцієнтами для формування декодованого мовного сигналу 210. У деяких конФігураціях, декодер 208 також може видавати сигнал 232 збудження на інший декодер, який може використовувати сигнал 232 збудження для одержання сигналу збудження іншої смуги частот (наприклад, верхньої смуги). У деяких реалізаціях, декодер 208 може бути виконаний з можливістю надання іншому декодеру додаткової інформації, яка належить до сигналу 232 збудження, наприклад, спектральний нахил, коефіцієнт посилення і відставання основного тону і мовний режим. [0045] Система кодера 204 і декодера 208 є базовим прикладом мовного кодека на основі аналізу через синтез. Кодування на основі лінійного прогнозування із збудженням кодовою книгою є одним популярним сімейством кодування за допомогою аналізу через синтез. Реалізації таких кодерів можуть здійснювати кодування форми хвилі залишку, що включає в себе такі операції, як вибір записів з фіксованих та адаптивних кодових книг, операції мінімізації помилок і/або операції перцептивного зважування. Інші реалізації кодування за допомогою аналізу через синтез включають в себе кодування на основі лінійного прогнозування зі змішаним збудженням (MELP), алгебраїчного CELP (ACELP), релаксаційного CELP (RCELP), регулярного імпульсного збудження (RPE), багатоімпульсного збудження (MPE), багатоімпульсного CELP (MP-CELP) і лінійного прогнозування із збудженням векторною сумою (VSELP). Споріднені способи кодування включають в себе кодування на основі багатосмугового збудження (MBE) та інтерполяції форми хвилі прототипу (PWI). Приклади стандартизованих мовних кодеків на основі аналізу через синтез включають в себе повношвидкісний кодек ETSI (Європейський інститут телекомунікаційних стандартів)-GSM (GSM 06.10) (який використовує лінійне прогнозування із залишковим збудженням (RELP)), поліпшений повношвидкісний кодек GSM (ETSI-GSM 06.60), стандартний кодер 11.8 кілобіт в секунду (кбіт/с) ITU (Міжнародний союз телекомунікацій) G.729 додаток Е, кодеки IS (внутрішній стандарт)-641 для IS-136 (схема множинного доступу з часовим розділенням), адаптивні багатошвидкісні кодеки GSM (GSMAMR) і кодек 4GV™ (Fourth-Generation Vocoder ™) (QUALCOMM Incorporated, San Diego, Calif.). Кодер 204 і відповідний декодер 208 можна реалізувати згідно з будь-якою з цих технологій або будь-якою іншою технологією кодування мови (відомою або перспективною), яка представляє мовний сигнал як (А) набір параметрів, які описують фільтр, і (В) сигнал збудження, що використовується для збудження описаного фільтра для відтворення мовного сигналу. [0046] Навіть після того як аналізуючий фільтр 222 видаляє грубу спектральну обвідну з мовного сигналу 202, можуть залишатися значний обсяг тонкої гармонічної структури, особливо для вокалізованої мови. Періодична структура належить до основного тону, і різні вокалізовані звуки, що видаються одним і тим самим, хто говорить, можуть мати різні формантні структури, але схожі структури основного тону. [0047] Ефективність кодування і/або якість мови можна підвищити з використанням одного або більше значень параметрів для кодування характеристик структури основного тону. Однією важливою характеристикою структури основного тону є частота першої гармоніки (яка також іменується основною частотою), яка звичайно становить в межах від 60 до 400 герц (Гц). Ця характеристика звичайно кодується як величина, зворотна основній частоті, яка також іменується відставанням основного тону. Відставання основного тону вказує кількість вибірок в одному періоді основного тону і може кодуватися як один або більше індексів кодової книги. Мовним сигналам від тих, хто говорить, чоловічої статі властиво мати відставання основного тону більшої величини, ніж мовні сигнали від тих, хто говорить, жіночої статі. [0048] Іншою характеристикою сигналу, що належить до структури основного тону, є періодичність, яка вказує силу гармонічної структури або, іншими словами, до якої міри сигнал є гармонічним або ангармонічним. Двома типовими індикаторами періодичності є перетини нуля і нормалізовані автокореляційні функції (NACF). Періодичність також може бути вказана 5 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 коефіцієнтом посилення основного тону, який звичайно кодується як коефіцієнт посилення кодової книги (наприклад, квантований коефіцієнт посилення адаптивної кодової книги). [0049] Кодер 204 може включати в себе один або більше модулів, виконаних з можливістю кодування довготривалої гармонічної структури мовного сигналу 202. У деяких підходах до кодування на основі CELP, кодер 204 включає в себе модуль аналізу на основі кодування з лінійний прогнозуванням (LPC) відкритого циклу, який кодує короткочасні характеристики або грубу спектральну обвідну, після якого йде стадія аналізу на основі довгострокового прогнозування замкненого циклу, який кодує тонку структуру основного тону або гармонічну структуру. Короткочасні характеристики кодуються як коефіцієнти (наприклад, параметри 228 фільтрації), і довготривалі характеристики кодуються як значення параметрів, наприклад, відставання основного тону і коефіцієнт посилення основного тону. Наприклад, кодер 204 може бути виконаний з можливістю виведення кодованого сигналу 226 збудження у формі, яка включає в себе один або більше індексів кодової книги (наприклад, індекс фіксованої кодової книги та індекс адаптивної кодової книги) і відповідні значення коефіцієнта посилення. Обчислення цього квантованого представлення залишкового сигналу (наприклад, блоком 224 квантування В) може включати в себе вибір таких індексів та обчислення таких значень. Кодування структури основного тону також може включати в себе інтерполяцію форми хвилі прототипу основного тону, і ця операція може включати в себе обчислення різниці між послідовними імпульсами основного тону. Моделювання довготривалої структури може бути заборонене для кадрів, що відповідають невокалізованій мови, яка звичайно шумоподібна і не структурована. [0050] Деякі реалізації декодера 208 можуть передбачати можливість виведення сигналу 232 збудження на інший декодер (наприклад, декодер верхньої смуги) після відновлення довготривалої структури (основного тону або гармонічної структури). Наприклад, такий декодер може бути виконаний з можливістю виведення сигналу 232 збудження як деквантованою версією кодованого сигналу 226 збудження. Звичайно, можна також реалізувати декодер 208 таким чином, що інший декодер здійснює деквантування кодованого сигналу 226 збудження для одержання сигналу 232 збудження. [0051] На Фіг. 3 показана блок-схема, що демонструє приклад широкосмугового мовного кодера 342 і широкосмугового мовного декодера 358. Один або більше компонентів широкосмугового мовного кодера 342 і/або широкосмугового мовного декодера 358 можна реалізувати в обладнанні (наприклад, схемі), програмному забезпеченні або їх комбінації. Широкосмуговий мовний кодер 342 і широкосмуговий мовний декодер 358 можна реалізувати на окремих електронних пристроях або на одному і тому самому електронному пристрої. [0052] Широкосмуговий мовний кодер 342 включає в себе набір 344 фільтрів А, кодер 348 першої смуги і кодер 350 другої смуги. Набір 344 фільтрів А виконаний з можливістю фільтрації широкосмугового мовного сигналу 340 для формування сигналу 346a першої смуги (наприклад, вузькосмугового сигналу) і сигналу 346b другої смуги (наприклад, сигналу верхньої смуги). [0053] Кодер 348 першої смуги виконаний з можливістю кодування сигналу 346a першої смуги для формування параметрів 352 фільтрації (наприклад, параметрів вузькосмугової (NB) фільтрації) і кодованого сигналу 354 збудження (наприклад, кодованого вузькосмугового сигналу збудження). У деяких конФігураціях, кодер 348 першої смуги може формувати параметри 352 фільтрації і кодований сигнал 354 збудження як індекси кодової книги або в іншій квантованій формі. У деяких конФігураціях, кодер 348 першої смуги можна реалізувати відповідно до кодера 204, описаного в зв'язку з Фіг. 2. [0054] Кодер 350 другої смуги виконаний з можливістю кодування сигналу 346b другої смуги (наприклад, сигналу верхньої смуги) згідно з інформацією в кодованому сигналі 354 збудження для формування параметрів 356 кодування другої смуги (наприклад, параметрів кодування верхньої смуги). Кодер 350 другої смуги може бути виконаний з можливістю формування параметрів 356 кодування другої смуги як індексів кодової книги або в іншій квантованій формі. Один конкретний приклад широкосмугового мовного кодера 342 виконаний з можливістю кодування широкосмугового мовного сигналу 340 на швидкості близько 8.55 кбіт/с, причому близько 7.55 кбіт/с використовується для параметрів 352 фільтрації і кодованого сигналу 354 збудження, і близько 1 кбіт/с використовується для параметрів 356 кодування другої смуги. У деяких реалізаціях, параметри 352 фільтрації, кодований сигнал 354 збудження і параметри 356 кодування другої смуги можуть бути включені в кодований мовний сигнал 106. [0055] У деяких конФігураціях, кодер 350 другої смуги можна реалізувати аналогічно кодеру 204, описаному в зв'язку з Фіг. 2. Наприклад, кодер 350 другої смуги може формувати параметри фільтрації другої смуги (наприклад, в складі параметрів 356 кодування другої смуги) як описано в зв'язку з кодером 204, описаним в зв'язку з Фіг. 2. Однак кодер 350 другої смуги 6 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 може відрізнятися в деяких відношеннях. Наприклад, кодер 350 другої смуги може включати в себе генератор збудження другої смуги, який може генерувати сигнал другої смуги збудження на основі кодованого сигналу 354 збудження. Кодер 350 другої смуги може використовувати сигнал другої смуги збудження для формування синтезованого сигналу другої смуги і для визначення коефіцієнта посилення другої смуги. У деяких конФігураціях, кодер 350 другої смуги може квантувати коефіцієнт посилення другої смуги. Відповідно, приклади параметрів 356 кодування другої смуги включають в себе параметри фільтрації другої смуги і квантований коефіцієнт посилення другої смуги. [0056] Може бути корисним об'єднувати параметри 352 фільтрації, кодований сигнал 354 збудження і параметри 356 кодування другої смуги в єдиний бітовий потік. Наприклад, може бути корисним мультиплексувати кодовані сигнали один з одним для передачі (наприклад, по дротовому, оптичному або бездротовому каналу передачі) або для збереження, як кодований широкосмуговий мовний сигнал. У деяких конФігураціях, широкосмуговий мовний кодер 342 включає в себе мультиплексор (не показаний), виконаний з можливістю об'єднання параметрів 352 фільтрації, кодованого сигналу 354 збудження і параметрів 356 кодування другої смуги в мультиплексований сигнал. Параметри 352 фільтрації, кодований сигнал 354 збудження і параметри 356 кодування другої смуги можуть бути прикладами параметрів, включених в кодований мовний сигнал 106, як описано в зв'язку з Фіг. 1. [0057] У деяких реалізаціях, електронний пристрій який включає в себе широкосмуговий мовний кодер 342 також може включати в себе схему, виконану з можливістю передачі мультиплексованого сигналу в канал передачі, наприклад, дротовий, оптичний або бездротовий канал. Такий електронний пристрій також може бути виконаний з можливістю здійснення однієї або більше операцій кодування каналу на сигналі, наприклад, кодування з виправленням помилок (наприклад, сумісного за швидкістю згортального кодування) і/або кодування, з виявленням помилок (наприклад, циклічного надмірного кодування) і/або одного або більше рівнів кодування мережного протоколу (наприклад, Ethernet, протоколу керування передачею/інтернет-протоколу (TCP/IP), cdma2000тощо). [0058] Може бути корисним, щоб мультиплексор був виконаний з можливістю впровадження параметрів 352 фільтрації і кодованого сигналу 354 збудження як віддільного підпотоку мультиплексованого сигналу, таким чином, що параметри 352 фільтрації і кодований сигнал 354 збудження можуть відновлюватися і декодуватися незалежно від іншої частини мультиплексованого сигналу, наприклад, сигналу верхньої смуги і/або нижньої смуги. Наприклад, мультиплексований сигнал може бути сконФігурований таким чином, що параметри 352 фільтрації і кодований сигнал 354 збудження можна відновлювати шляхом видалення параметрів 356 кодування другої смуги. Потенційна перевага такої ознаки полягає в можливості уникати необхідності перекодування параметрів 356 кодування другої смуги до їх передачі системі, яка підтримує декодування параметрів 352 фільтрації і кодованого сигналу 354 збудження, але не підтримує декодування параметрів 356 кодування другої смуги. [0059] Широкосмуговий мовний декодер 358 може включати в себе декодер 360 першої смуги, декодер 366 другої смуги і набір 368 фільтрів B. Декодер 360 першої смуги (наприклад, вузькосмуговий декодер) виконаний з можливістю декодування параметрів 352 фільтрації і кодованого сигналу 354 збудження для формування декодованого сигналу 362a першої смуги (наприклад, декодованого вузькосмугового сигналу). Декодер 366 другої смуги виконаний з можливістю декодування параметрів 356 кодування другої смуги згідно із сигналом 364 збудження (наприклад, вузькосмугового сигналу збудження), на основі кодованого сигналу 354 збудження, для формування декодованого сигналу 362b другої смуги (наприклад, декодованого сигналу верхньої смуги). У цьому прикладі, декодер 360 першої смуги виконаний з можливістю видачі сигналу 364 збудження на декодер 366 другої смуги. Набір 368 фільтрів виконаний з можливістю об'єднання декодованого сигналу 362a першої смуги і декодованого сигналу 362b другої смуги для формування декодованого широкосмугового мовного сигналу 370. [0060] Деякі реалізації широкосмугового мовного декодера 358 можуть включати в себе демультиплексор (не показаний), виконаний з можливістю формування параметрів 352 фільтрації, кодованого сигналу 354 збудження і параметрів 356 кодування другої смуги з мультиплексованого сигналу. Електронний пристрій, який включає в себе широкосмуговий мовний декодер 358, може включати в себе схему, виконану з можливістю прийому мультиплексованого сигналу з каналу передачі, наприклад, дротового, оптичного або бездротового каналу. Такий електронний пристрій також може бути виконаний з можливістю здійснення однієї або більше операцій декодування каналу на сигналі, наприклад, декодування з виправленням помилок (наприклад, сумісного за швидкістю згортального декодування) і/або декодування з виявленням помилок (наприклад, циклічного надмірного декодування) і/або 7 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 одного або більше рівнів декодування мережного протоколу (наприклад, Ethernet, TCP/IP, cdma2000). [0061] Набір 344 фільтрів А в широкосмуговому мовному кодері 342 виконаний з можливістю фільтрації вхідного сигналу згідно зі схемою розділення смуг для формування сигналу 346a першої смуги (наприклад, вузькосмугового сигналу або низькочастотного піддіапазону) і сигналу 346b другої смуги (наприклад, сигналу верхньої смуги або високочастотного піддіапазону). Залежно від критеріїв конструкції для конкретного застосування, вихідні піддіапазони можуть мати рівні або нерівні смуги і можуть перекриватися або не перекриватися. Можлива також конФігурація набору 344 фільтрів А, який створює більше двох піддіапазонів. Наприклад, набір 344 фільтрів А може бути виконаний з можливістю формування одного або більше сигналів нижньої смуги, які включають в себе компоненти в діапазоні частот нижче діапазону частот сигналу 346a першої смуги (наприклад, в діапазоні 50-300 герц (Гц)). Набір 344 фільтрів А також може бути виконаний з можливістю формування одного або більше додаткових сигналів верхньої смуги, які включають в себе компоненти в діапазоні частот вище діапазону частот сигналу 346b другої смуги (наприклад, в діапазоні 14-20, 16-20 або 16-32 кілогерц (кГц)). У такій конФігурації, широкосмуговий мовний кодер 342 можна реалізувати для окремого кодування сигналу або сигналів, і мультиплексор може бути виконаний з можливістю включення додаткового кодованого сигналу або сигналів у мультиплексований сигнал (наприклад, як одну або більше віддільних частин). [0062] На Фіг. 4 показана блок-схема, що демонструє більш конкретний приклад кодера 404. Зокрема, Фіг. 4 демонструє архітектуру CELP на основі аналізу через синтез для кодування мови з низькою бітовою швидкістю. У цьому прикладі, кодер 404 включає в себе модуль 472 кадрування і попередньої обробки, модуль 476 аналізу, перетворення 478 коефіцієнтів, блок 480 квантування, синтезуючий фільтр 484, суматор 488, модуль 492 перцептивного зважувального фільтра і мінімізації помилки і модуль 494 оцінювання збудження. Потрібно зазначити, що кодер 404 і один або більше з компонентів кодера 404 можна реалізувати в обладнанні (наприклад, схемі), програмному забезпеченні або їх комбінації. [0063] Мовний сигнал 402 (наприклад, вхідний мовний сигнал s) може являти собою електронний сигнал, який містить мовну інформацію. Наприклад, акустичний мовний сигнал може захоплюватися мікрофоном і дискретизуватися для формування мовного сигналу 402. У деяких конФігураціях, мовний сигнал 402 можна дискретизувати з частотою 16 кГц. Мовний сигнал 402 може містити діапазон частот, як описано вище в зв'язку з Фіг. 1. [0064] Мовний сигнал 402 може надходити на модуль 472 кадрування і попередньої обробки. Модуль 472 кадрування і попередньої обробки може ділити мовний сигнал 402 на послідовність кадрів. Кожний кадр може бути конкретним періодом часу. Наприклад, кожний кадр може відповідати 20 мс мовного сигналу 402. Модуль 472 кадрування і попередньої обробки може здійснювати інші операції на мовному сигналі, наприклад фільтрацію (наприклад, одну або більше з низькочастотної, високочастотної і смугової фільтрації). Відповідно, модуль 472 кадрування і попередньої обробки може формувати заздалегідь оброблений мовний сигнал 474 (наприклад, S(l), де l-номер вибірки) на основі мовного сигналу 402. [0065] Модуль 476 аналізу може визначати набір коефіцієнтів (наприклад, аналізуючий фільтр лінійного прогнозування А(z)). Наприклад, модуль 476 аналізу може кодувати спектральну обвідну заздалегідь обробленого мовного сигналу 474 як набір коефіцієнтів, як описано в зв'язку з Фіг. 2. [0066] Коефіцієнти можуть надходити на перетворення 478 коефіцієнтів. Перетворення 478 коефіцієнтів перетворює набір коефіцієнтів у відповідний вектор LSF (наприклад, LSF, LSP, ISF, ISP тощо), як описано вище в зв'язку з Фіг. 2. [0067] Вектор LSF надходить на блок 480 квантування. Блок 480 квантування квантує вектор LSF в квантований вектор 482 LSF. Наприклад, блок 480 квантування може здійснювати векторне квантування на векторі LSF для одержання квантованого вектора 482 LSF. У деяких конФігураціях, вектори LSF можна генерувати і/або квантувати на підкадровій основі. У цих конФігураціях, тільки квантовані вектори LSF, що відповідають визначеним підкадрам (наприклад, останньому або кінцевому підкадру кожного кадру), можуть відправлятися на мовний декодер. У цих конФігураціях, блок 480 квантування також може визначати квантований ваговий вектор 441. Вагові вектори використовуються для квантування векторів LSF (наприклад, проміжні вектори LSF) між векторами LSF, які відповідають підкадрам, що відправляються. Вагові вектори можна квантувати. Наприклад, блок 480 квантування може визначати індекс кодової книги або пошукової таблиці, що відповідає ваговому вектору, який найкращим чином узгоджується з фактичним ваговим вектором. Квантовані вагові вектори 441 (наприклад, індекси) можуть відправлятися на мовний декодер. Квантований ваговий вектор 8 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 441 і квантований вектор 482 LSF можуть бути прикладами параметрів 228 фільтрації, описаних вище в зв'язку з Фіг. 2. [0068] Блок 480 квантування може формувати індикатор 481 режиму прогнозування, який вказує режим прогнозування для кожного кадру. Індикатор 481 режиму прогнозування може відправлятися на декодер. У деяких конФігураціях, індикатор 481 режиму прогнозування може вказувати один з двох режимів прогнозування (наприклад, чи використовується квантування з прогнозуванням або квантування без прогнозування) для кадру. Наприклад, індикатор 481 режиму прогнозування може вказувати, чи квантується кадр на основі попереднього кадру (наприклад, з прогнозуванням) чи ні (наприклад, без прогнозування). Індикатор 481 режиму прогнозування може вказувати режим прогнозування поточного кадру. У деяких конФігураціях, індикатором 481 режиму прогнозування може бути біт, що відправляється на декодер, який вказує, чи квантується кадр з прогнозуванням або без прогнозування. [0069] Квантований вектор 482 LSF надходить на синтезуючий фільтр 484. Синтезуючий фільтр 484 формує синтезований мовний сигнал 486 (наприклад, реконструйований мовний сигнал де l-номер вибірки) на основі вектора 482 LSF (наприклад, квантованих коефіцієнтів) і сигналу 496 збудження. Наприклад, синтезуючий фільтр 484 фільтрує сигнал 496 збудження на основі квантованого вектора 482 LSF (наприклад, 1/А(z)). [0070] Синтезований мовний сигнал 486 віднімається із заздалегідь обробленого мовного сигналу 474 суматором 488 для одержання сигналу 490 помилки (який також іменується, сигналом помилки прогнозування). Сигнал 490 помилки надходить на модуль 492 перцептивного зважувального фільтра і мінімізації помилки. [0071] Модуль 492 перцептивного зважувального фільтра і мінімізації помилки формує зважений сигнал 493 помилки на основі сигналу 490 помилки. Наприклад, не всі компоненти (наприклад, частотні компоненти) сигналу 490 помилки однаково впливають на якість синтезованого мовного сигналу, що сприймається. Помилка в деяких смугах частот впливає більшим чином на якість мови, ніж помилка в інших смугах частот. Модуль 492 перцептивного зважувального фільтра і мінімізації помилки може формувати зважений сигнал 493 помилки, який знижує помилку в частотних компонентах, що сильніше впливають на якість мови, і перерозподіляє помилку на інші частотні компоненти, що слабкіше впливають на якість мови. [0072] Модуль 494 оцінювання збудження генерує сигнал 496 збудження і кодований сигнал 498 збудження на основі вихідного сигналу модуля 492 перцептивного зважувального фільтра і мінімізації помилки. Наприклад, модуль 494 оцінювання збудження оцінює один або більше параметрів, які характеризують сигнал 490 помилки (наприклад, зважений сигнал 493 помилки). Кодований сигнал 498 збудження може включати в себе один або більше параметрів і може відправлятися на декодер. У підході CELP, наприклад, модуль 494 оцінювання збудження може визначати параметри, наприклад, індекс адаптивної кодової книги (або кодової книги основного тону), коефіцієнт посилення адаптивної кодової книги (або кодової книги основного тону), індекс фіксованої кодової книги і коефіцієнт посилення фіксованої кодової книги, які характеризують сигнал 490 помилки (наприклад, зважений сигнал 493 помилки). На основі цих параметрів, модуль 494 оцінювання збудження може генерувати сигнал 496 збудження, який надходить на синтезуючий фільтр 484. У цьому підході, індекс адаптивної кодової книги, коефіцієнт посилення адаптивної кодової книги (наприклад, квантований коефіцієнт посилення адаптивної кодової книги), індекс фіксованої кодової книги і коефіцієнт посилення фіксованої кодової книги (наприклад, квантований коефіцієнт посилення фіксованої кодової книги) може відправлятися на декодер як кодований сигнал 498 збудження. [0073] Кодований сигнал 498 збудження може бути прикладом кодованого сигналу 226 збудження, описаного вище в зв'язку з Фіг. 2. Відповідно, квантований ваговий вектор 441, квантований вектор 482 LSF, кодований сигнал 498 збудження і/або індикатор 481 режиму прогнозування можуть бути включені в кодований мовний сигнал 106 як описано вище в зв'язку з Фіг. 1. [0074] На Фіг. 5 показана схема, що демонструє приклад кадрів 503 залежно від часу 501. Кожний кадр 503 ділиться на декілька підкадрів 505. У прикладі, проілюстрованому на Фіг. 5, попередній кадр А 503a включає в себе 4 підкадри 505a-d, попередній кадр В 503b включає в себе 4 підкадри 505e-h, і поточний кадр С 503c включає в себе 4 підкадри 505i-l. Типовий кадр 503 може займати період часу 20 мс і може включати в себе 4 підкадри, хоча можна використовувати кадри різної довжини і/або з різними кількостями підкадрів. Кожний кадр можна позначати відповідним номером кадру, де n означає поточний кадр (наприклад, поточний кадр С 503c). Крім того, кожний підкадр можна позначати відповідним номером підкадру k. 9 UA 115350 C2 [0075] Фіг. 5 можна використовувати для ілюстрації одного прикладу квантування LSF в кодері. Кожний підкадр k в кадрі n має відповідний вектор LSF для використання в аналізуючому і синтезуючому фільтрах. Кінцевий вектор 527 LSF поточного 5 кадру (наприклад, останній підкадр вектор LSF n-го кадру) позначається де Проміжний вектор 525 LSF поточного кадру (наприклад, проміжний вектор LSF n-го кадру) позначається "Проміжний вектор LSF" - це вектор LSF між іншими векторами LSF (наприклад, між 10 15 ) за часом 501. Один приклад кінцевого вектора 523 LSF попереднього кадру проілюстрований на Фіг. 5 і позначається де Термін "попередній кадр", що використовується тут, може стосуватися будь-якого кадру до поточного кадру (наприклад, n-1, n-2, n-3, тощо). Відповідно, "кінцевий вектор LSF попереднього кадру" може являти собою кінцевий вектор LSF, що відповідає будь-якому кадру до поточного кадру. У прикладі, проілюстрованому на Фіг. 5, кінцевий вектор 523 LSF попереднього кадру відповідає останньому підкадру 505h попереднього кадру В 503b (наприклад, кадру n-1), який безпосередньо передує поточному кадру С 503c (наприклад, кадр n). [0076] Кожний вектор LSF має розмірність M, де кожне вимірювання вектора LSF відповідає одиничному вимірюванню або значенню LSF. Наприклад, M звичайно дорівнює 16 для широкосмугового мовного сигналу (наприклад, мовного сигналу, дискретизованого на частоті 16 кГц). i-е вимірювання LSF k-го підкадру кадру n позначається як 20 [0077] У процесі квантування кадру n, кінцевий вектор LSF можна квантувати в першу чергу. Це квантування може здійснюватися без прогнозування (наприклад, без використання попереднього вектора LSF в процесі квантування) або з прогнозуванням (наприклад, з використанням попереднього вектора LSF квантувати проміжний вектор LSF чином, що в процесі квантування). Потім можна Наприклад, кодер може вибирати ваговий вектор таким виражається в рівнянні (1). 25 (1) [0078] i-е вимірювання вагового вектора де відповідає одиничній вазі і позначається . Потрібно також зазначити, що дає значення, обмежене 30 wn проміжний вектор LSF x m n і , не обмежений. Зокрема, якщо , та або може бути поза діапазоном , результуючий . Кодер може визначати (наприклад, вибирати) ваговий вектор таким чином, щоб квантований проміжний вектор LSF був найближчим до фактичного проміжного вектора LSF в кодері на основі деякого ступеня спотворення, наприклад середньоквадратичної помилки (MSE) або логарифмічного спектрального спотворення (LSD). У процесі квантування, кодер передає індекси квантування 35 кінцевого вектора реконструювати LSF та індекс вагового вектора , що дозволяє декодеру . [0079] Вектори LSF підкадрів інтерполюються на основі з використанням коефіцієнтів інтерполяції , заданих рівнянням (2). (2) 40 10 UA 115350 C2 Потрібно зазначити, що 5 10 15 20 25 30 підлягають умові . Коефіцієнти інтерполяції можуть бути заздалегідь визначеними значеннями, відомими кодеру і декодеру. [0080] На Фіг. 6 показана блок-схема операцій, що демонструє одну конФігурацію способу 600 для кодування мовного сигналу кодером 404. Наприклад, електронний пристрій, що включає в себе кодер 404, може здійснювати спосіб 600. Фіг. 6 демонструє процедури квантування LSF для поточного кадру n. [0081] Кодер 404 може одержувати 602 квантований кінцевий вектор LSF попереднього кадру. Наприклад, кодер 404 може квантувати кінцевий вектор LSF, що відповідає попередньому кадру (наприклад, ), вибираючи вектор кодової книги, найближчий до кінцевого вектора LSF, що відповідає попередньому кадру n-1. [0082] Кодер 404 може квантувати 604 кінцевий вектор LSF поточного кадру (наприклад, ). Кодер 404 квантує 604 кінцевий вектор LSF поточного кадру на основі кінцевого вектора LSF попереднього кадру, якщо використовується квантування з прогнозуванням LSF. Однак квантування 604 вектора LSF поточного кадру не спирається на кінцевий вектор LSF попереднього кадру, якщо використовується квантування без прогнозування для кінцевого вектора LSF поточного кадру. [0083] Кодер 404 може квантувати 606 проміжний вектор LSF поточного кадру (наприклад, ) шляхом визначення вагового вектора (наприклад, ). Наприклад, кодер 404 може вибирати ваговий вектор, який дає квантований проміжний вектор LSF, найближчий до фактичного проміжного вектора LSF. Як проілюстровано в рівнянні (1), квантований проміжний вектор LSF може базуватися на ваговому векторі, кінцевому векторі LSF попереднього кадру і кінцевому векторі LSF поточного кадру. [0084] Кодер 404 може відправляти 608 квантований кінцевий вектор LSF поточного кадру і ваговий вектор на декодер. Наприклад, кодер 404 може передавати кінцевий вектор LSF поточного кадру і ваговий вектор на передавач електронного пристрою, який може передавати їх на декодер іншого електронного пристрою. [0085] На Фіг. 7 показана схема, що демонструє приклад визначення вектора LSF. Фіг. 7 демонструє попередній кадр А 703a (наприклад, кадр n-1) і поточний кадр В 703b (наприклад, кадр n) залежно від часу 701. У цьому прикладі, мовні вибірки зважуються з використанням зважувальних фільтрів і потім використовуються для визначення (наприклад, обчислення) вектора LSF. По-перше, зважувальний фільтр на кодері 404 використовується для визначення 707 кінцевого вектора LSF попереднього кадру (наприклад, ). По-друге, зважувальний фільтр на кодері 404 використовується для визначення 709 кінцевого вектора LSF поточного 35 40 45 кадру (наприклад, ). По-третє, зважувальний фільтр на кодері 404 використовується для визначення 711 (наприклад, обчислення) проміжного вектора LSF поточного кадру (наприклад, ). [0086] Фіг. 8 включає в себе дві схеми, що демонструють приклади інтерполяції та екстраполяції LSF. Горизонтальна вісь в прикладі А 821a демонструє частоту в Гц 819a і горизонтальна вісь в прикладі В 821b також демонструє частоту в Гц 819b. Зокрема, декілька вимірювання LSF представлені на Фіг. 8 в частотній ділянці. Однак потрібно зазначити, що представляти вимірювання LSF можна різними способами (наприклад, через частоту, кут, значення тощо). Відповідно, на горизонтальних осях 819a-b в прикладі А 821a та прикладі В 821a можна відкладати величини, виражені в інших одиницях. [0087] Приклад А 821a демонструє випадок інтерполяції, де розглядається перше вимірювання вектора LSF. Як описано вище, вимірювання LSF означає одиничне вимірювання або значення LSF вектора LSF. Зокрема, приклад А 821a демонструє вимірювання 813a кінцевої LSF попереднього кадру (наприклад, кінцевої LSF поточного кадру (наприклад, 50 ) на частоті 500 Гц і вимірювання 817a ) на частоті 800 Гц. У прикладі А 821a, першу вагу (наприклад, перше вимірювання вагового вектора 11 ) можна використовувати UA 115350 C2 для квантування і вказівки вимірювання 815a проміжної LSF (наприклад, ) проміжного вектора LSF поточного кадру між вимірюванням 813a кінцевої LSF попереднього кадру (наприклад, ) і вимірюванням 817a кінцевої LSF поточного кадру (наприклад, частотою 819a. Наприклад, якщо 5 то , як проілюстровано в прикладі А 821a. [0088] Приклад В 821b демонструє випадок екстраполяції, де розглядається перше вимірювання LSF вектора LSF. Зокрема, приклад В 821b демонструє вимірювання 813b кінцевої LSF попереднього кадру (наприклад, поточного кадру (наприклад, 10 ) за ) на частоті 500 Гц і вимірювання 817b кінцевої LSF ) на частоті 800 Гц. У прикладі В 821b, першу вагу (наприклад, перше вимірювання вагового вектора ) можна використовувати для квантування і вказівки вимірювання 815b проміжної LSF (наприклад, ) проміжного вектора LSF поточного кадру, яке не лежить між вимірюванням 813b кінцевої LSF попереднього кадру (наприклад, ) і вимірюванням 817b кінцевої LSF поточного кадру (наприклад, частотою 819b. Як проілюстровано в прикладі В 821b, наприклад, ) за якщо 15 то 20 . [0089] На Фіг. 9 показана блок-схема операцій, що демонструє одну конФігурацію способу 900 для декодування кодованого мовного сигналу декодером. Наприклад, електронний пристрій, що включає в себе декодер, може здійснювати спосіб 900. [0090] Декодер може одержувати 902 деквантований кінцевий вектор LSF попереднього кадру (наприклад, ). Наприклад, декодер може витягувати деквантований кінцевий вектор LSF, що відповідає попередньому кадру, який раніше був декодований (або оцінений, у випадку видалення кадру). [0091] Декодер може деквантувати 904 кінцевий вектор LSF поточного кадру (наприклад, 25 ). Наприклад, декодер може деквантувати 904 кінцевий вектор LSF поточного кадру за допомогою пошуку вектора LSF поточного кадру в кодовій книзі або таблиці на основі прийнятого індексу вектора LSF. [0092] Декодер може визначати 906 проміжний вектор LSF поточного кадру (наприклад, 30 35 40 45 ) на основі вагового вектора (наприклад, ). Наприклад, декодер може приймати ваговий вектор від кодера. Потім декодер може визначати 906 проміжний вектор LSF поточного кадру на основі кінцевого вектора LSF попереднього кадру, кінцевого вектора LSF поточного кадру і вагового вектора, як проілюстровано в рівнянні (1). Як описано вище, кожний вектор LSF може мати M вимірювань або вимірювань LSF (наприклад, 16 вимірювань LSF). Повинне бути мінімальне рознесення між двома або більше з вимірювань LSF у векторі LSF, щоб вектор LSF був стабільним. Однак за наявності множинних вимірювань LSF, кластеризованих тільки з мінімальним розділенням, є суттєва імовірність нестабільності вектора LSF. Як описано вище, декодер може перевпорядковувати вектор LSF у випадках, коли існує менше, ніж мінімальне рознесення між двома або більше з вимірювань LSF у векторі LSF. [0093] Підхід, описаний в зв'язку з Фіг. 4-9, для зважування та інтерполяції і/або екстраполяції векторів LSF добре діє в умовах чистого каналу (без видалень кадрів і/або помилок передачі). Однак цей підхід може стикатися з деякими серйозними проблемами, коли відбувається одне або більше видалень кадрів. Видаленим кадром є кадр, який не прийнятий декодером або прийнятий з помилками. Наприклад, кадр є видаленим кадром, якщо кодований мовний сигнал, який відповідає кадру, не прийнятий або прийнятий з помилками. [0094] Приклад видалення кадру наведений нижче з посиланням на Фіг. 5. Припустимо, що попередній кадр В 503b є видаленим кадром (наприклад, кадр n-1 втрачений). У цьому 12 UA 115350 C2 прикладі, декодер оцінює втрачений кінцевий вектор LSF (позначений ) і проміжний вектор LSF (позначений ) на основі попереднього кадру А 503a (наприклад, кадру n-2). Також припустимо, що кадр n прийнятий правильно. Декодер може використовувати рівняння (1) для обчислення проміжного вектора 525 LSF поточного кадру на основі 5 . У випадку екстраполяції конкретного вимірювання LSF j (наприклад, вимірювання j) , існує можливість, що вимірювання LSF розташовується далеко за межами частот вимірювання LSF, які використовуються в процесі екстраполяції (наприклад, ) в кодері. [0095] Вимірювання LSF в кожному векторі LSF можна впорядковувати таким чином, що 10 , де - мінімальне рознесення (наприклад, розділення за частотою) між двома послідовними вимірюваннями LSF. Як описано вище, якщо визначене вимірювання LSF j (наприклад, позначене ), екстраполюється з помилкою, внаслідок чого, воно виявляється значно більше вірного значення, наступні вимірювання LSF можна повторно обчислювати як 15 20 25 30 35 40 45 хоча вони обчислюються в декодері як . Наприклад, хоча повторно обчислені вимірювання LSF j, j+1, тощо, можуть бути менше вимірювання LSF j, їх можна повторно обчислювати для одержання внаслідок структури впорядкування, що накладається. У результаті, виходить вектор LSF, який має два або більше вимірювань LSF, розташовані один за одним з мінімальною дозволеною відстанню. Два або більше вимірювань LSF з мінімальним рознесенням можуть іменуватися "кластеризованими вимірюваннями LSF". Кластеризовані вимірювання LSF можуть призводити до нестабільних вимірювань LSF (наприклад, нестабільних вимірювань LSF підкадру) і/або нестабільних векторів LSF. Нестабільні вимірювання LSF відповідають коефіцієнтам синтезуючого фільтра, які можуть призводити до виникнення мовного артефакту. [0096] Строго кажучи, фільтр може бути нестабільним, якщо щонайменше один його полюс знаходиться на або поза одиничним колом. Відносно кодування мови, терміни "нестабільний" і "нестабільність", що використовуються тут, мають розширене тлумачення. Наприклад, "нестабільне вимірювання LSF" означає будь-яке вимірювання LSF, що відповідає коефіцієнту синтезуючого фільтра, який можуть призводити до виникнення мовного артефакту. Наприклад, нестабільні вимірювання LSF не обов'язково відповідають полюсам на або поза одиничним колом, але можуть бути "нестабільними", якщо їх значення дуже близькі один до одного. Справа в тому, що вимірювання LSF, розташовані дуже близько один до одного, можуть задавати в синтезуючому фільтрі полюси, що мають характеристики фільтра з яскраво вираженим резонансними на деяких частотах, що призводить до утворення мовних артефактів. Наприклад, нестабільне квантоване вимірювання LSF може задавати для синтезуючого фільтра розміщення полюса, яке може призводити до небажаного збільшення енергії. Звичайно, розділення вимірювань LSF може підтримуватися в околі для вимірювань LSF, представлених кутами від 0 до . Термін "нестабільний вектор LSF", що використовується тут, означає вектор, який включає в себе одне або більше нестабільних вимірювань LSF. Крім того, "нестабільний синтезуючий фільтр" це синтезуючий фільтр, один або більше коефіцієнтів (наприклад, полюсів) якого відповідають одному або більше нестабільним вимірюванням LSF. [0097] На Фіг. 10 показана схема, що демонструє один приклад кластеризованих вимірювань 1029 LSF. Вимірювання LSF проілюстровані за частотою 1019 в Гц, хоча потрібно зазначити, що вимірювання LSF можна альтернативно виражати в інших одиницях. Вимірювання LSF (наприклад, 1031a, 1031b та 1031c) є прикладами вимірювань LSF, включених в проміжний вектор LSF поточного кадру після оцінювання і перевпорядкування. Наприклад, в попередньому видаленому кадрі, декодер оцінює перше вимірювання LSF кінцевого вектора LSF попереднього кадру (наприклад, ), яке, швидше за все, невірно. У цьому випадку, 13 UA 115350 C2 перше вимірювання LSF проміжного вектора LSF поточного кадру (наприклад, 1031a) також, швидше за все, невірне. [0098] Декодер може спробувати перевпорядкувати наступне вимірювання LSF проміжного 5 вектора LSF поточного кадру (наприклад, 1031b). Як описано вище, може потребуватися, щоб кожне наступне вимірювання LSF у векторі LSF було більше попереднього елемента. Наприклад, 1031b повинне бути більше 1031a. Таким чином, декодер може розміщувати його з мінімальним рознесенням (наприклад, Δ) від 1031a. Зокрема, . Відповідно, може існувати декілька вимірювань LSF (наприклад, 1031b та 10 15 20 25 30 35 40 45 50 1031a, 1031c) з мінімальним рознесенням (наприклад, Δ=100 Гц), як проілюстровано в Фіг. 10. Таким чином, 1031a, 1031b та 1031c представляють приклад кластеризованих вимірювань 1029 LSF. Кластеризовані вимірювання LSF можуть призводити до утворення нестабільного синтезуючого фільтра, що, в свою чергу може призводити до формування мовних артефактів у синтезованому мовному сигналі. [0099] На Фіг. 11 показаний графік, що демонструє приклад артефактів 1135 внаслідок кластеризованих вимірювань LSF. Зокрема, графік демонструє приклад артефактів 1135 в декодованому мовному сигналі (наприклад, синтезованому мовному сигналі), зумовлених застосуванням кластеризованих вимірювань LSF до синтезуючого фільтра. По горизонтальній осі графіка відкладений час 1101 (наприклад, в секундах), і по вертикальній осі графіка відкладена амплітуда 1133 (наприклад, число, значення). Амплітуда 1133 може бути числом, вираженим в бітах. У деяких конФігураціях, 16 бітів можна використовувати для представлення вибірок мовного сигналу, значення якого вміщене в межах від -32768 до 32767, що відповідає діапазону (наприклад, значенню від -1 до +1 в форматі плаваючої коми). Потрібно зазначити, що амплітуду 1133 можна представляти по-різному залежно від реалізації. У деяких прикладах, значення амплітуди 1133 може відповідати електромагнітному сигналу, що характеризується напругою (у вольтах) і/або струмом (в амперах). [00100] Інтерполяція і/або екстраполяція векторів LSF між векторами LSF поточного і попереднього кадрів на основі підкадрів відомі в системах кодування мови. В умовах видаленого кадру, як описано в зв'язку з Фіг. 10 та 11, схеми інтерполяції і/або екстраполяції LSF можуть генерувати нестабільні вектори LSF для визначених підкадрів, що може приводити до дратуючих артефактів у синтезованому мовному сигналі. Артефакти виникають частіше, коли для квантування LSF, крім методів квантування без прогнозування використовуються методи квантування з прогнозуванням. [00101] Для вирішення проблеми звичайно використовується збільшена кількість бітів для захисту від помилок і використовується квантування без прогнозування, щоб уникнути поширення помилок. Однак введення додаткових бітів неможливе для кодерів з обмеженням за кількістю бітів, і використання квантування без прогнозування може знижувати якість мови в умовах чистого каналу (наприклад, без видалених кадрів). [00102] Розкриті тут системи та способи можна використовувати для заглушення потенційної нестабільності кадру. Наприклад, деякі конФігурації розкритих тут систем та способів можна застосовувати для заглушення артефактів кодування мови внаслідок нестабільності кадру, зумовленої квантуванням з прогнозуванням і міжкадровою інтерполяцією та екстраполяцією векторів LSF в умовах каналу з порушеннями. [00103] На Фіг. 12 показана блок-схема, що демонструє одну конФігурацію електронного пристрою 1237, виконаного з можливістю заглушення потенційної нестабільності кадру. Електронний пристрій 1237 включає в себе декодер 1208. Один або більше з вищеописаних декодерів можна реалізувати відповідно до декодера 1208, описаного в зв'язку з Фіг. 12. Електронний пристрій 1237 також включає в себе детектор 1243 видалених кадрів. Детектор 1243 видалених кадрів можна реалізувати окремо від декодера 1208 або можна реалізувати в декодері 1208. Детектор 1243 видалених кадрів виявляє видалений кадр (наприклад, кадр, який не прийнятий або прийнятий з помилками) і може забезпечувати індикатор 1267 видаленого кадру при виявленні видаленого кадру. Наприклад, детектор 1243 видалених кадрів може виявляти видалений кадр на основі одного або більше з хеш-функції, контрольної суми, коду повторення, біта(ів) парності, циклічного контролю по надмірності (CRC), тощо. Потрібно зазначити, що один або більше з компонентів, включених в електронний пристрій 1237 і/або 14 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 декодер 1208, можна реалізувати в обладнанні (наприклад, схемі), програмному забезпеченні або їх комбінації. Одна або більше з ліній або стрілок, проілюстрованих в наведених тут блоксхемах, можуть вказувати зв'язки (наприклад, з'єднання) між компонентами або елементами. [00104] Декодер 1208 формує декодований мовний сигнал 1259 (наприклад, синтезований мовний сигнал) на основі прийнятих параметрів. Приклади прийнятих параметрів включають в себе квантовані вектори 1282 LSF, квантовані вагові вектори 1241, індикатор 1281 режиму прогнозування і кодований сигнал 1298 збудження. Декодер 1208 включає в себе один або більше з блока 1245 зворотного квантування А, модуля 1249 інтерполяції, зворотне перетворення 1253 коефіцієнтів, синтезуючого фільтра 1257, модуля 1261 визначення параметра кадру, модуля 1265 заміщення вагового значення, модуля 1269 визначення стабільності і блока 1273 зворотного квантування В. [00105] Декодер 1208 приймає квантовані вектори 1282 LSF (наприклад, квантовані LSF, LSP, ISF, ISP, коефіцієнти PARCOR, коефіцієнти відображення або значення логарифмічного відношення площ) і квантовані вагові вектори 1241. Прийняті квантовані вектори 1282 LSF можуть відповідати піднабору підкадрів. Наприклад, квантовані вектори 1282 LSF можуть включати в себе тільки квантовані кінцеві вектори LSF, які відповідають останньому підкадру кожного кадру. У деяких конФігураціях, квантовані вектори 1282 LSF можуть бути індексами, що відповідають пошуковій таблиці або кодовій книзі. Додатково або альтернативно, квантовані вагові вектори 1241 можуть бути індексами, що відповідають таблиці або кодовій книзі. [00106] Електронний пристрій 1237 і/або декодер 1208 може приймати індикатор 1281 режиму прогнозування від кодера. Як описано вище, індикатор 1281 режиму прогнозування вказує режим прогнозування для кожного кадру. Наприклад, індикатор 1281 режиму прогнозування може вказувати один з двох або більше режимів прогнозування для кадру. Зокрема, індикатор 1281 режиму прогнозування може вказувати, чи використовується квантування з прогнозуванням або квантування без прогнозування. [00107] Коли кадр прийнятий правильно, блок 1245 зворотного квантування А деквантує прийняті квантовані вектори 1282 LSF для формування деквантованих векторів 1247 LSF. Наприклад, блок 1245 зворотного квантування А може шукати деквантовані вектори 1247 LSF на основі індексів (наприклад, квантованих векторів 1282 LSF), що відповідають пошуковій таблиці або кодовій книзі. Деквантування квантованих векторів 1282 LSF також може здійснюватися на основі індикатора 1281 режиму прогнозування. Деквантовані вектори 1247 LSF можуть відповідати піднабору підкадрів (наприклад, кінцевим векторам LSF , що відповідають останньому підкадру кожного кадру). Крім того, блок 1245 зворотного квантування А деквантує квантовані вагові вектори 1241 для формування деквантованих вагових векторів 1239. Наприклад, блок 1245 зворотного квантування А може шукати деквантовані вагові вектори 1239 на основі індексів (наприклад, квантовані вагові вектори 1241) що відповідають пошуковій таблиці або кодовій книзі. [00108] Коли кадр є видаленим кадром, детектор 1243 видалених кадрів може видавати індикатор 1267 видаленого кадру на блок 1245 зворотного квантування A. Коли виникає видалений кадр, один або більше квантованих векторів 1282 LSF і/або один або більше квантованих вагових векторів 1241 можуть не прийматися або можуть містити помилки. У цьому випадку, блок 1245 зворотного квантування А може оцінювати один або більше деквантованих векторів 1247 LSF (наприклад, кінцевий вектор LSF видаленого кадру ) на основі одного або більше векторів LSF з попереднього кадру (наприклад, кадру до видаленого кадру). Додатково або альтернативно, коли виникає видалений кадр, блок 1245 зворотного квантування А може оцінювати один або більше деквантованих вагових векторів 1239. [00109] Деквантовані вектори 1247 LSF (наприклад, кінцеві вектори LSF) можуть надходити на модуль 1261 визначення параметра кадру і на модуль 1249 інтерполяції. Крім того, один або більше деквантованих вагових векторів 1239 можуть надходити на модуль 1261 визначення параметра кадру. Модуль 1261 визначення параметра кадру одержує кадри. Наприклад, модуль 1261 визначення параметра кадру може одержувати видалений кадр (наприклад, оцінений деквантований ваговий вектор 1239 та оцінений деквантований вектор 1247 LSF, що відповідає видаленому кадру). Модуль 1261 визначення параметра кадру також може одержувати кадр (наприклад, правильно прийнятий кадр) після видаленого кадру. Наприклад, модуль 1261 визначення параметра кадру може одержувати деквантований ваговий вектор 1239 і деквантований вектор 1247 LSF, що відповідає правильно прийнятому кадру, після видаленого кадру. [00110] Модуль 1261 визначення параметра кадру визначає параметр А 1263a кадру на основі деквантованих векторів 1247 LSF і деквантованого вагового вектора 1239. Один приклад 15 UA 115350 C2 параметра А 1263a кадру є проміжним вектором LSF (наприклад, ). Наприклад, модуль визначення параметра кадру може застосовувати прийнятий ваговий вектор (наприклад, деквантований ваговий вектор 1239) для генерації проміжного вектора LSF поточного кадру. Наприклад, модуль 1261 визначення параметра кадру може визначати проміжний вектор LSF 5 10 поточного кадру на основі кінцевого вектора LSF поточного кадру , кінцевого вектора w LSF попереднього кадру і ваговий вектор n поточного кадру відповідно до рівняння (1). Інші приклади параметра А 1263a кадру включають в себе вектори LSP і вектори ISP. Наприклад, параметром А 1263a кадру може бути будь-який параметр, оцінений на основі двох параметрів кінцевого підкадру. [00111] У деяких конФігураціях, модуль 1261 визначення параметра кадру може визначати, чи впорядкований параметр кадру (наприклад, проміжний вектор LSF поточного кадру ) відповідно до правила до будь-якого перевпорядкування. В одному прикладі, цей параметр кадру є проміжним вектором LSF поточного кадру 15 , і, згідно з правилом, всі вимірювання LSF в проміжному векторі LSF розпізнаються в порядку зростання з щонайменше мінімальним рознесенням в кожній парі вимірювань LSF. У цьому прикладі, модуль 1261 визначення параметра кадру може визначати, чи розташовуються всі вимірювання LSF в проміжному векторі LSF в порядку зростання з щонайменше мінімальним рознесенням в кожній парі вимірювань LSF. Наприклад, модуль 1261 визначення параметра кадру може 20 25 30 визначати, чи справедливо . [00112] У деяких конФігураціях, модуль 1261 визначення параметра кадру може видавати індикатор 1262 впорядкування на модуль 1269 визначення стабільності. Індикатор 1262 впорядкування вказує, чи були вимірювання LSF (наприклад, в проміжному векторі LSF ) невпорядковані і/або не рознесені більш ніж з мінімальним рознесенням Δ до будь-якого перевпорядкування. [00113] У ряді випадків модуль 1261 визначення параметра кадру може перевпорядковувати вектор LSF. Наприклад, якщо модуль 1261 визначення параметра кадру визначає, що вимірювання LSF, включені в проміжний вектор LSF поточного кадру , не розміщені в порядку зростання, і/або ці вимірювання LSF не мають щонайменше мінімального рознесення в кожній парі вимірювань LSF, модуль 1261 визначення параметра кадру може перевпорядковувати вимірювання LSF. Наприклад, модуль 1261 визначення параметра кадру може перевпорядковувати вимірювання LSF в проміжному векторі LSF поточного кадру таким чином, що 35 критеріям . Іншими словами, модуль 1261 визначення параметра кадру може додавати Δ до вимірювання LSF для одержання позиції наступного вимірювання LSF, якщо наступне вимірювання LSF не було відділене щонайменше на Δ. Крім того, це можна робити тільки для вимірювань LSF, які не відділені з мінімальним рознесенням Δ. Як описано вище, це перевпорядкування може призводити до кластеризованих вимірювань LSF в проміжному векторі LSF 40 45 для кожного вимірювання LSF, яке не задовольняє . Відповідно, параметр А 1263a кадру може бути перевпорядкованим вектором LSF (наприклад, проміжним вектором LSF ) в ряді випадків (наприклад, для одного або більше кадрів після видаленого кадру). [00114] У деяких конФігураціях, модуль 1261 визначення параметра кадру можна реалізувати в складі блока 1245 зворотного квантування A. Наприклад, визначення проміжного вектора LSF на основі деквантованих векторів 1247 LSF і деквантованого вагового вектора 1239 можна розглядати як частину процедури деквантування. Параметр А 1263a кадру може надходити на модуль 1265 заміщення вагового значення і, в необов'язковому порядку, на модуль 1269 визначення стабільності. 16 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 [00115] Модуль 1269 визначення стабільності може визначати, чи є кадр потенційно нестабільним. Модуль 1269 визначення стабільності може видавати індикатор 1271 нестабільності на модуль 1265 заміщення вагового значення, коли модуль 1269 визначення стабільності визначає, що поточний кадр потенційно нестабільний. Іншими словами, індикатор 1271 нестабільності вказує, що поточний кадр потенційно нестабільний. [00116] Потенційно нестабільний кадр являє собою кадр, одна або більше характеристик якого вказують небезпеку формування мовного артефакту. Приклади характеристик, які вказують небезпеку формування мовного артефакту, можуть включати в себе вказівку, коли кадр знаходиться в одному або більше кадрах після видаленого кадру, чи використовує якийнебудь кадр між кадром і видаленим кадром квантування з прогнозуванням (або без прогнозування), і/або чи впорядкований параметр кадру відповідно до правила до будь-якого перевпорядкування. Потенційно нестабільний кадр може відповідати (наприклад, може включати в себе) одному або більше нестабільним векторам LSF. Потрібно зазначити, що потенційно нестабільний кадр в ряді випадків може бути фактично стабільним. Однак може бути складно визначити, чи є кадр визначено стабільним або визначено нестабільним, не синтезуючи весь кадр. Відповідно, розкриті тут системи та способи можуть робити коректуючу дію для заглушення потенційно нестабільних кадрів. Одна перевага розкритих тут систем та способів полягає в тому, що потенційно нестабільні кадри можна виявляти, не синтезуючи весь кадр. Це дозволяє скоротити обсяг обробки і/або затримку, необхідну для виявлення і/або заглушення мовних артефактів. [00117] У першому підході, модуль 1269 визначення стабільності визначає, чи є поточний кадр (наприклад, кадр n) потенційно нестабільним, на основі того, чи знаходиться поточний кадр в пороговій кількості кадрів після видаленого кадру, і чи використовує який-небудь кадр між видаленим кадром і поточним кадром квантування з прогнозуванням (або без прогнозування). Поточний кадр може бути прийнятий правильно. У цьому підході, модуль 1269 визначення стабільності визначає, що кадр потенційно нестабільний, якщо поточний кадр прийнятий в пороговій кількості кадрів після видаленого кадру і якщо жоден кадр між поточним кадром і видаленим кадром (за наявності) не використовує квантування без прогнозування. [00118] Кількість кадрів між видаленим кадром і поточним кадром можна визначити на основі індикатора 1267 видаленого кадру. Наприклад, модуль 1269 визначення стабільності може підтримувати лічильник, який збільшується для кожного кадру після видаленого кадру. В одній конфігурації, порогова кількість кадрів після видаленого кадру може бути рівною 1. В цій конфігурації, наступний кадр після видаленого кадру завжди вважається потенційно нестабільним. Наприклад, якщо поточний кадр є наступним кадром після видаленого кадру (отже, між поточним кадром і видаленим кадром немає жодного кадру, який використовує квантування без прогнозування), то модуль 1269 визначення стабільності визначає, що поточний кадр потенційно нестабільний. У цьому випадку, модуль 1269 визначення стабільності забезпечує індикатор 1271 нестабільності, який вказує, що поточний кадр потенційно нестабільний. [00119] В інших конФігураціях, порогова кількість кадрів після видаленого кадру може бути більше 1. В цих конФігураціях, модуль 1269 визначення стабільності може визначати, чи існує між поточним кадром і видаленим кадром кадр, який використовує квантування без прогнозування, на основі індикатора 1281 режиму прогнозування. Наприклад, індикатор 1281 режиму прогнозування може вказувати, чи використовується для кожного кадру квантування з прогнозуванням або без прогнозування. Якщо між поточним кадром і видаленим кадром існує кадр, який використовує квантування без прогнозування, модуль 1269 визначення стабільності може визначити, що поточний кадр стабільний (наприклад, не є потенційно нестабільним). У цьому випадку, модуль 1269 визначення стабільності може не вказувати, що поточний кадр потенційно нестабільний. [00120] У другому підході, модуль 1269 визначення стабільності визначає, чи є поточний кадр (наприклад, кадр n) потенційно нестабільним, на основі того, чи прийнятий поточний кадр після видаленого кадру, чи був параметр А 1263a кадру впорядкований відповідно до правила до будь-якого перевпорядкування, і чи використовує який-небудь кадр між видаленим кадром і поточним кадром квантування без прогнозування. У цьому підході, модуль 1269 визначення стабільності визначає, що кадр потенційно нестабільний, якщо поточний кадр одержаний після видаленого кадру, якщо параметр А 1263a кадру не був впорядкований відповідно до правила до будь-якого перевпорядкування і якщо жоден кадр між поточним кадром і видаленим кадром (за наявності) не використовує квантування без прогнозування. [00121] Чи прийнятий поточний кадр після видаленого кадру, можна визначити на основі індикатора 1267 видаленого кадру. Чи використовує який-небудь кадр між видаленим кадром і 17 UA 115350 C2 5 10 поточним кадром квантування без прогнозування, можна визначити на основі індикатора режиму прогнозування, як описано вище. Наприклад, якщо поточний кадр знаходиться в деякій кількості кадрів після видаленого кадру, якщо між поточним кадром і видаленим кадром немає жодного кадру, який використовує квантування без прогнозування, і якщо параметр А 1263a кадру не був впорядкований відповідно до правила до будь-якого перевпорядкування, то модуль 1269 визначення стабільності визначає, що поточний кадр потенційно нестабільний. У цьому випадку, модуль 1269 визначення стабільності забезпечує індикатор 1271 нестабільності, який вказує, що поточний кадр потенційно нестабільний. [00122] У деяких конФігураціях, модуль 1269 визначення стабільності може одержувати від модуля 1261 визначення параметра кадру індикатор 1262 впорядкування, який вказує, чи був параметр А 1263a кадру (наприклад, проміжний вектор LSF поточного кадру ) впорядкований відповідно до правила до будь-якого перевпорядкування. Наприклад, індикатор 1262 впорядкування може вказувати, чи були вимірювання LSF (наприклад, в проміжному 15 20 25 векторі LSF ) невпорядковані і/або чи не були рознесені з щонайменше мінімальним рознесенням Δ, до будь-якого перевпорядкування. [00123] У деяких конФігураціях можна реалізувати поєднання першого і другого підходів. Наприклад, для першого кадру після видаленого кадру можна застосовувати перший підхід, тоді як для наступних кадрів можна застосовувати другий підхід. У цій конФігурації, один або більше з наступних кадрів можна вказувати як потенційно нестабільні на основі другого підходу. Інші підходи до визначення потенційної нестабільності можуть базуватися на зміні енергії імпульсної характеристики синтезуючих фільтрів на основі векторів LSF і/або змін енергії, що відповідають різним смугам частот синтезуючих фільтрів на основі векторів LSF. [00124] Коли потенційна нестабільність не вказана (наприклад, коли поточний кадр стабільний), модуль 1265 заміщення вагового значення забезпечує або передає параметр А 1263a кадру як параметр В 1263 кадру модулю 1249 інтерполяції. В одному прикладі, параметр А 1263a кадру є проміжним вектором LSF поточного кадру векторі LSF поточного кадру , кінцевому векторі LSF попереднього кадру ваговому векторі поточного кадру 30 35 40 45 , який базується на кінцевому і прийнятому . Коли потенційна нестабільність не вказана, можна припустити, що проміжний вектор LSF поточного кадру стабільний і може надходити на модуль 1249 інтерполяції. [00125] Якщо поточний кадр потенційно нестабільний, модуль 1265 заміщення вагового значення застосовує вагове значення замісника для генерації стабільного параметра кадру (наприклад, проміжного вектора LSF замісника поточного кадру ). "Стабільний параметр кадру" - це параметр, який не обумовлює мовні артефакти. Вагове значення замісника може бути заздалегідь визначеним значенням, яке гарантує стабільний параметр кадру (наприклад, параметр В 1263b кадру). Вагове значення замісника можна застосовувати замість (прийнятого і/або оціненого) деквантованого вагового вектора 1239. Зокрема, модуль 1265 заміщення вагового значення застосовує вагове значення замісника до деквантованих векторів 1247 LSF для генерації стабільного параметра В 1263b кадру, коли індикатор 1271 нестабільності вказує, що поточний кадр потенційно нестабільний. У цьому випадку, параметр А 1263a кадру і/або деквантований ваговий вектор 1239 поточного кадру можна ігнорувати. Відповідно, модуль 1265 заміщення вагового значення генерує параметр В 1263b кадру, який заміняє параметр А 1263a кадру, коли поточний кадр потенційно нестабільний. [00126] Наприклад, модуль 1265 заміщення вагового значення може застосовувати вагове значення замісника для генерації проміжного вектора LSF замісника (стабільного) поточного кадру . Наприклад, модуль 1265 заміщення вагового значення може застосовувати вагове значення замісника до кінцевого вектора LSF поточного кадру і кінцевого вектора LSF попереднього кадру. У деяких конФігураціях, вагове значення замісника може бути скалярним значенням від 0 до 1. Наприклад, вагове значення замісника 50 може діяти як ваговий вектор замісника (наприклад, M-вимірний), де всі значення рівні 18 , UA 115350 C2 де . замісника (стабільного) поточного кадру рівняння (3). Таким чином, проміжний вектор LSF може генеруватися або визначатися відповідно до (3) 5 Використання 10 від 0 до 1 гарантує, що результуючий проміжний вектор LSF замісника поточного кадру стабільний, якщо нижчележачі кінцеві вектори LSF та стабільні. У цьому випадку, проміжний вектор LSF замісника поточного кадру є одним прикладом стабільного параметра кадру, оскільки застосування коефіцієнтів 1255, що відповідають проміжному вектору LSF замісника поточного кадру, до синтезуючого фільтра 1257, не призводить до утворення мовних артефактів у декодованому мовному сигналі 1259. У деяких конФігураціях, можна вибирати рівним 0.6, що додає трохи більшу вагу кінцевому вектору LSF поточного кадру (наприклад, 15 ) в порівнянні з кінцевим вектором LSF попереднього кадру (наприклад, ), що відповідає видаленому кадру. [00127] В альтернативних конФігураціях, вагове значення замісника може бути ваговим вектором замісника , що включає в себе індивідуальні вагові коефіцієнти , де i , 2, , M , і n означає поточний кадр. У цих конФігураціях, кожний ваговий коефіцієнт 1 становить від 0 до 1, і всі вагові коефіцієнти можуть не бути однакові. У цих 20 конфігураціях, вагове значення замісника (наприклад, ваговий вектор замісника можна застосовувати згідно з рівнянням (4). ) (4) 25 30 35 [00128] У деяких конФігураціях, вагове значення замісника може бути статичним. В інших конФігураціях, модуль 1265 заміщення вагового значення може вибирати вагове значення замісника на основі попереднього кадру і поточного кадру. Наприклад, різні вагові значення замісника можна вибирати на основі класифікації (наприклад, вокалізований, невокалізований тощо) двох кадрів (наприклад, попереднього кадру і поточного кадру). Додатково або альтернативно, різні вагові значення замісника можна вибирати на основі однієї або більше різниць LSF між двома кадрами (наприклад, різниці енергій імпульсної характеристики фільтра LSF). [00129] Деквантовані вектори 1247 LSF і параметр В 1263b кадру може надходити на модуль 1249 інтерполяції. Модуль 1249 інтерполяції інтерполює деквантовані вектори 1247 LSF і параметр В 1263b кадру для генерації векторів LSF підкадрів (наприклад, векторів LSF підкадрів для поточного кадру). [00130] В одному прикладі, параметр В 1263 кадру є проміжним вектором LSF поточного кадру кадру , і деквантовані вектори 1247 LSF включають в себе кінцевий вектор LSF попереднього і кінцевий вектор LSF поточного кадру може інтерполювати вектори LSF підкадрів використанням коефіцієнтів . Наприклад, модуль 1249 інтерполяції на основі інтерполяції з відповідно . Коефіцієнти інтерполяції 40 заздалегідь визначеними значеннями, таким чином, що номер підкадру, де до рівняння можуть бути . Тут, k - цілочисельний , де K - сумарна кількість підкадрів у поточному кадрі. Модуль 19 UA 115350 C2 1249 інтерполяції, відповідно, інтерполює вектори LSF, що відповідають кожному підкадру в поточному кадрі. У деяких конФігураціях, 5 10 15 20 25 30 35 40 45 50 55 для кінцевого вектора LSF поточного кадру . [00131] Модуль 1249 інтерполяції передає вектори 1251 LSF зворотному перетворенню 1253 коефіцієнтів. Зворотне перетворення 1253 коефіцієнтів перетворює вектори 1251 LSF в коефіцієнти 1255 (наприклад, коефіцієнти фільтрації для синтезуючого фільтра 1/А(z)). Коефіцієнти 1255 надходять на синтезуючий фільтр 1257. [00132] Блок 1273 зворотного квантування В приймає і деквантує кодований сигнал 1298 збудження для формування сигналу 1275 збудження. В одному прикладі, кодований сигнал 1298 збудження може включати в себе індекс фіксованої кодової книги, квантований коефіцієнт посилення фіксованої кодової книги, індекс адаптивної кодової книги і квантований коефіцієнт посилення адаптивної кодової книги. У цьому прикладі, блок 1273 зворотного квантування В шукає запис фіксованої кодової книги (наприклад, вектор) на основі індексу фіксованої кодової книги і застосовує деквантований коефіцієнт посилення фіксованої кодової книги до запису фіксованої кодової книги для одержання внеску фіксованої кодової книги. Додатково, блок 1273 зворотного квантування В шукає запис адаптивної кодової книги на основі індексу адаптивної кодової книги і застосовує деквантований коефіцієнт посилення адаптивної кодової книги запису адаптивної кодової книги для одержання внеску адаптивної кодової книги. Потім блок 1273 зворотного квантування В може підсумовувати внесок фіксованої кодової книги і внесок адаптивної кодової книги для формування сигналу 1275 збудження. [00133] Синтезуючий фільтр 1257 фільтрує сигнал 1275 збудження відповідно до коефіцієнтів 1255 для формування декодованого мовного сигналу 1259. Наприклад, полюси синтезуючого фільтра 1257 можна конФігурувати відповідно до коефіцієнтів 1255. Потім сигнал 1275 збудження пропускається через синтезуючий фільтр 1257 для формування декодованого мовного сигналу 1259 (наприклад, синтезованого мовного сигналу). [00134] На Фіг. 13 показана блок-схема операцій, що демонструє одну конФігурацію способу 1300 для заглушення потенційної нестабільності кадру. Електронний пристрій 1237 може одержувати 1302 кадр після (наприклад, наступний за часом) видаленого кадру. Наприклад, електронний пристрій 1237 може виявляти видалений кадр на основі одного або більше з хешфункції, контрольної суми, коду повторення, біта(ів) парності, циклічного контролю по надмірності (CRC), тощо. Потім електронний пристрій 1237 може одержувати 1302 кадр після видаленого кадру. Одержаний 1302 кадр може бути кадром, наступним після видаленого кадру, або може знаходитися в будь-якій кількості кадрів після видаленого кадру. Одержаний 1302 кадр може бути правильно прийнятим кадром. [00135] Електронний пристрій 1237 може визначати 1304, чи є кадр потенційно нестабільним. У деяких конФігураціях, визначення 1304, чи є кадр потенційно нестабільним, базується на тому, чи впорядкований параметр кадру (наприклад, проміжний вектор LSF поточного кадру) відповідно до правила до будь-якого перевпорядкування (наприклад, до перевпорядкування, за наявності). Додатково або альтернативно, визначення 1304, чи є кадр потенційно нестабільним, може базуватися на тому, чи знаходиться кадр (наприклад, поточний кадр) в пороговій кількості кадрів після видаленого кадру. Додатково або альтернативно, визначення 1304, чи є кадр потенційно нестабільним, можуть базуватися на тому, чи використовує який-небудь кадр між кадром (наприклад, поточний кадр) і видаленим кадром квантування без прогнозування. [00136] У першому підході, як описано вище, електронний пристрій 1237 визначає 1304, що кадр потенційно нестабільний, якщо кадр прийнятий в пороговій кількості кадрів після видаленого кадру і якщо жоден кадр між кадром і видаленим кадром (за наявності) не використовує квантування без прогнозування. У другому підході як описано вище, електронний пристрій 1237 визначає 1304, що кадр потенційно нестабільний, якщо поточний кадр одержаний після видаленого кадру, якщо параметр кадру (наприклад, проміжний вектор LSF поточного кадру ) не був впорядкований відповідно до правила до будь-якого перевпорядкування, і якщо жоден кадр між поточним кадром і видаленим кадром (за наявності) не використовує квантування без прогнозування. Можна використовувати додаткові або альтернативні підходи. Наприклад, перший підхід можна застосовувати для першого кадру після видаленого кадру, тоді як другий підхід можна застосовувати для наступних кадрів. [00137] Електронний пристрій 1237 може застосовувати 1306 вагове значення замісника для генерації стабільного параметра кадру, якщо кадр потенційно нестабільний. Наприклад, електронний пристрій 1237 може генерувати стабільний параметр кадру (наприклад, проміжний 20 UA 115350 C2 вектор LSF замісника поточного кадру ) шляхом застосування вагового значення замісника до деквантованих векторів 1247 LSF (наприклад, до кінцевого вектора LSF поточного кадру і кінцевого вектора LSF попереднього кадру ). Наприклад, генерація стабільного параметра кадру може включати в себе визначення проміжного вектора LSF замісника 5 поточного кадру (наприклад, (наприклад, ), який рівний добутку кінцевого вектора LSF поточного кадру ) і вагового значення замісника (наприклад, вектора LSF попереднього кадру (наприклад, 10 15 20 25 30 35 40 45 50 ) плюс добуток кінцевого ) і різниці одиниці і вагового значення замісника (наприклад, ). Це може здійснюватися, наприклад, як проілюстровано в рівнянні (3) або рівнянні (4). [00138] На Фіг. 14 показана блок-схема операцій, що демонструє більш конкретну конФігурацію способу 1400 для заглушення потенційної нестабільності кадру. Електронний пристрій 1237 може одержувати 1402 поточний кадр. Наприклад, електронний пристрій 1237 може одержувати параметри для періоду часу, що відповідає поточному кадру. [00139] Електронний пристрій 1237 може визначати 1404, чи є поточний кадр видаленим кадром. Наприклад, електронний пристрій 1237 може виявляти видалений кадр на основі одного або більше з хеш-функції, контрольної суми, коду повторення, біта(ів) парності, циклічного контролю по надмірності (CRC), тощо. [00140] Якщо поточний кадр є видаленим кадром, електронний пристрій 1237 може одержувати 1406 оцінений кінцевий вектор LSF поточного кадру і оцінений проміжний вектор LSF поточного кадру на основі попереднього кадру. Наприклад, декодер 1208 може використовувати маскування помилки для видаленого кадру. У маскуванні помилки, декодер 1208 може копіювати кінцевий вектор LSF попереднього кадру і проміжний вектор LSF попереднього кадру як оцінений вектор LSF поточного кадру та оцінений проміжний вектор LSF поточного кадру, відповідно. Цієї процедури можна дотримуватися для послідовних видалених кадрів. [00141] У випадку двох послідовних видалених кадрів, наприклад, другий видалений кадр може включати в себе копію кінцевого вектора LSF з першого видаленого кадру і всі інтерпольовані вектори LSF, наприклад, проміжний вектор LSF і вектори LSF підкадрів. Відповідно, вектори LSF у другому видаленому кадрі можуть бути приблизно такими самими, як вектори LSF в першому видаленому кадрі. Наприклад, кінцевий вектор LSF першого видаленого кадру можна копіювати з попереднього кадру. Таким чином, всі вектори LSF в послідовних видалених кадрах можна вивести з останнього правильно прийнятого кадру. Останній правильно прийнятий кадр може бути стабільним з дуже високою імовірністю. Отже, імовірність того, що послідовні видалені кадри мають нестабільний вектор LSF, дуже мала. Це, по суті, пояснюється тим, що може не існувати інтерполяції між двома різними векторами LSF у випадку послідовних видалених кадрів. Відповідно, в деяких конФігураціях вагове значення замісника може не застосовуватися для послідовно видалених кадрів. [00142] Електронний пристрій 1237 може визначати 1416 вектори LSF підкадрів для поточного кадру. Наприклад, електронний пристрій 1237 може інтерполювати кінцевий вектор LSF поточного кадру, проміжний вектор LSF поточного кадру і кінцевий вектор LSF попереднього кадру на основі коефіцієнтів інтерполяції для формування векторів LSF підкадрів для поточного кадру. У деяких конФігураціях, це може здійснюватися відповідно до рівняння (2). [00143] Електронний пристрій 1237 може синтезувати 1418 декодований мовний сигнал 1259 для поточного кадру. Наприклад, електронний пристрій 1237 може пропускати сигнал 1275 збудження через синтезуючий фільтр 1257, заданий коефіцієнтами 1255 на основі векторів 1251 LSF підкадрів для формування декодованого мовного сигналу 1259. [00144] Якщо поточний кадр не є видаленим кадром, електронний пристрій 1237 може застосовувати 1408 прийнятий ваговий вектор для генерації проміжного вектора LSF поточного кадру. Наприклад, електронний пристрій 1237 може множити кінцевий вектор LSF поточного кадру на прийнятий ваговий вектор і може множити кінцевий вектор LSF попереднього кадру на 1 мінус прийнятий ваговий вектор. Потім електронний пристрій 1237 може підсумовувати одержані добутки для генерації проміжного вектора LSF поточного кадру. Це може здійснюватися згідно з рівнянням (1). 21 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 [00145] Електронний пристрій 1237 може визначати 1410, чи знаходиться поточний кадр в пороговій кількості кадрів після останнього видаленого кадру. Наприклад, електронний пристрій 1237 може використовувати лічильник, який відраховує кожний кадр після видаленого кадру, вказаного індикатором 1267 видаленого кадру. Лічильник можна обнуляти кожний раз, коли виникає видалений кадр. Електронний пристрій 1237 може визначати, чи знаходиться лічильник в межах порогової кількості кадрів. Порогове число може бути рівним одному або більше кадрам. Якщо поточний кадр не знаходиться в пороговій кількості кадрів після останнього видаленого кадру, електронний пристрій 1237 може визначати 1416 вектори LSF підкадрів для поточного кадру і синтезувати 1418 декодований мовний сигнал 1259, як описано вище. Визначення 1410, чи знаходиться поточний кадр в пороговій кількості кадрів після останнього видаленого кадру, може скорочувати непотрібну обробку кадрів з низькою імовірністю нестабільності (наприклад, для кадрів, виникаючих після одного або більше потенційно нестабільних кадрів, для яких потенційна нестабільність заглушена). [00146] Якщо поточний кадр знаходиться в пороговій кількості кадрів після останнього видаленого кадру, електронний пристрій 1237 може визначати 1412, чи використовує якийнебудь кадр між поточним кадром і останнім видаленим кадром квантування без прогнозування. Наприклад, електронний пристрій 1237 може приймати індикатор 1281 режиму прогнозування, який вказує, чи використовує кожний кадр квантування з прогнозуванням або без прогнозування. Електронний пристрій 1237 може використовувати індикатор 1281 режиму прогнозування для відстеження режиму прогнозування для кожного кадру. Якщо який-небудь кадр між поточним кадром і останнім видаленим кадром використовує квантування без прогнозування, електронний пристрій 1237 може визначати 1416 вектори LSF підкадрів для поточного кадру і синтезувати 1418 декодований мовний сигнал 1259, як описано вище. Визначення 1412, чи використовує який-небудь кадр між поточним кадром і останнім видаленим кадром квантування без прогнозування, може скорочувати непотрібну обробку кадрів з низькою імовірністю нестабільності (наприклад, для кадрів, виникаючих після кадру, який повинен включати в себе точний кінцевий вектор LSF, оскільки кінцевий вектор LSF не був квантований, на основі будь-якого попереднього кадру). [00147] Якщо жоден кадр між поточним кадром і останнім видаленим кадром не використовує квантування без прогнозування (наприклад, якщо всі кадри між поточним кадром і останнім видаленим кадром використовують квантування з прогнозуванням), електронний пристрій 1237 може застосовувати 1414 вагове значення замісника для генерації проміжного вектора LSF замісника поточного кадру. У цьому випадку, електронний пристрій 1237 може визначити, що поточний кадр потенційно нестабільний, і може застосовувати вагове значення замісника для генерації стабільного параметра кадру (наприклад, проміжного вектора LSF замісника поточного кадру). Наприклад, електронний пристрій 1237 може множити кінцевий вектор LSF поточного кадру на ваговий вектор замісника і може множити кінцевий вектор LSF попереднього кадру на 1 мінус ваговий вектор замісника. Потім електронний пристрій 1237 може підсумовувати одержані добутки для генерації проміжного вектора LSF замісника поточного кадру. Це може здійснюватися згідно з рівнянням (3) або рівнянням (4). [00148] Потім електронний пристрій 1237 може визначати 1416 вектори LSF підкадрів для поточного кадру, як описано вище. Наприклад, електронний пристрій 1237 може інтерполювати вектори LSF підкадрів на основі кінцевого вектора LSF поточного кадру, кінцевого вектора LSF попереднього кадру, проміжного вектора LSF замісника поточного кадру і коефіцієнтів інтерполяції. Це може здійснюватися відповідно до рівняння (2). Електронний пристрій 1237 також може синтезувати 1418 декодований мовний сигнал 1259, як описано вище. Наприклад, електронний пристрій 1237 може пропускати сигнал 1275 збудження через синтезуючий фільтр 1257, заданий коефіцієнтами 1255, на основі векторів 1251 LSF підкадрів (які основані на поточному проміжному векторі LSF замісника) для формування декодованого мовного сигналу 1259. [00149] На Фіг. 15 показана блок-схема операцій, що демонструє іншу більш конкретну конФігурацію способу 1500 для заглушення потенційної нестабільності кадру. Електронний пристрій 1237 може одержувати 1502 поточний кадр. Наприклад, електронний пристрій 1237 може одержувати параметри для періоду часу, що відповідає поточному кадру. [00150] Електронний пристрій 1237 може визначати 1504, чи є поточний кадр видаленим кадром. Наприклад, електронний пристрій 1237 може виявляти видалений кадр на основі одного або більше з хеш-функції, контрольної суми, коду повторення, біта(ів) парності, циклічного контролю по надмірності (CRC), тощо. [00151] Якщо поточний кадр є видаленим кадром, електронний пристрій 1237 може одержувати 1506 оцінений кінцевий вектор LSF поточного кадру і оцінений проміжний вектор 22 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 LSF поточного кадру на основі попереднього кадру. Це може здійснюватися, як описано вище в зв'язку з Фіг. 14. [00152] Електронний пристрій 1237 може визначати 1516 вектори LSF підкадрів для поточного кадру. Це може здійснюватися, як описано вище в зв'язку з Фіг. 14. Електронний пристрій 1237 може синтезувати 1518 декодований мовний сигнал 1259 для поточного кадру. Це може здійснюватися, як описано вище в зв'язку з Фіг. 14. [00153] Якщо поточний кадр не є видаленим кадром, електронний пристрій 1237 може застосовувати 1508 прийнятий ваговий вектор для генерації проміжного вектора LSF поточного кадру. Це може здійснюватися, як описано вище в зв'язку з Фіг. 14. [00154] Електронний пристрій 1237 може визначати 1510, чи використовує який-небудь кадр між поточним кадром і останнім видаленим кадром квантування без прогнозування. Це може здійснюватися, як описано вище в зв'язку з Фіг. 14. Якщо який-небудь кадр між поточним кадром і останнім видаленим кадром використовує квантування без прогнозування, електронний пристрій 1237 може визначати 1516 вектори LSF підкадрів для поточного кадру і синтезувати 1518 декодований мовний сигнал 1259, як описано вище. [00155] Якщо жоден кадр між поточним кадром і останнім видаленим кадром не використовує квантування без прогнозування (наприклад, якщо всі кадри між поточним кадром і останнім видаленим кадром використовують квантування з прогнозуванням), електронний пристрій 1237 може визначати 1512, чи впорядкований проміжний вектор LSF поточного кадру відповідно до правила до будь-якого перевпорядкування. Наприклад, електронний пристрій 1237 може визначати, чи розташована кожна LSF в проміжному векторі LSF в порядку зростання з щонайменше мінімальним рознесенням в кожній парі вимірювань LSF до будь-якого перевпорядкування, як описано вище в зв'язку з Фіг. 12. Якщо проміжний вектор LSF поточного кадру впорядкований відповідно до правила до будь-якого перевпорядкування, електронний пристрій 1237 може визначати 1516 вектори LSF підкадрів для поточного кадру і синтезувати 1518 декодований мовний сигнал 1259, як описано вище. [00156] Якщо проміжний вектор LSF поточного кадру не впорядкований відповідно до правила до будь-якого перевпорядкування, електронний пристрій 1237 може застосовувати 1514 вагове значення замісника для генерації проміжного вектора LSF замісника поточного кадру. У цьому випадку, електронний пристрій 1237 може визначити, що поточний кадр потенційно нестабільний, і може застосовувати вагове значення замісника для генерації стабільного параметра кадру (наприклад, проміжного вектора LSF замісника поточного кадру). Це може здійснюватися, як описано вище в зв'язку з Фіг. 14. [00157] Потім електронний пристрій 1237 може визначати 1516 вектори LSF підкадрів для поточного кадру і синтезувати 1518 декодований мовний сигнал 1259, як описано вище в зв'язку з Фіг. 14. Наприклад, електронний пристрій 1237 може пропускати сигнал 1275 збудження через синтезуючий фільтр 1257, заданий коефіцієнтами 1255, на основі векторів 1251 LSF підкадрів (які основані на поточному проміжному векторі LSF замісника) для формування декодованого мовного сигналу 1259. [00158] На Фіг. 16 показана блок-схема операцій, що демонструє іншу більш конкретну конФігурацію способу 1600 для заглушення потенційної нестабільності кадру. Наприклад, деякі конФігурації розкритих тут систем та способів можна застосовувати в двох процедурах: виявлення потенційної нестабільності LSF і заглушення потенційної нестабільності LSF. [00159] Електронний пристрій 1237 може приймати 1602 кадр після видаленого кадру. Наприклад, електронний пристрій 1237 може виявляти видалений кадр і приймати один або більше кадрів після видаленого кадру. Зокрема, електронний пристрій 1237 може приймати параметри, що відповідають кадрам після видаленого кадру. [00160] Електронний пристрій 1237 може визначати, чи може проміжний вектор LSF поточного кадру бути нестабільним. У деяких реалізаціях, електронний пристрій 1237 може припускати, що один або більше кадрів після видаленого кадру потенційно нестабільні (наприклад, вони включають в себе потенційно нестабільний проміжний вектор LSF). [00161] При виявленні потенційної нестабільності, прийнятий ваговий вектор , що використовується кодером для інтерполяції/екстраполяції (наприклад, який передається як індекс на декодер 1208) можна ігнорувати. Наприклад, електронний пристрій 1237 (наприклад, декодер 1208) може ігнорувати ваговий вектор. [00162] Електронний пристрій 1237 може застосовувати 1604 вагове значення замісника для генерації проміжного вектора LSF замісника (стабільного) поточного кадру. Наприклад, декодер 1208 застосовує вагове значення замісника , як описано вище в зв'язку з Фіг. 12. 23 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 [00163] Нестабільність векторів LSF може розповсюджуватися, якщо наступні кадри (наприклад, n+1, n+2, тощо) використовують методи квантування з прогнозуванням для квантування кінцевих векторів LSF. Отже, для поточного кадру і наступного кадру, прийнятих 1608 до того, як електронний пристрій 1237 визначає 1606, 1614, що методи квантування LSF без прогнозування використовуються для кадру, декодер 1208 може визначати 1612, чи впорядкований проміжний вектор LSF поточного кадру відповідно до правила до будь-якого перевпорядкування. Зокрема, електронний пристрій 1237 може визначати 1606, чи використовує поточний кадр квантування з прогнозуванням LSF. Якщо поточний кадр використовує квантування з прогнозуванням LSF, електронний пристрій 1237 може визначати 1608, чи правильно прийнятий новий кадр (наприклад, наступний кадр). Якщо новий кадр прийнятий неправильно (наприклад, новий кадр є видаленим кадром), то операція може перейти до прийому 1602 поточного кадру після видаленого кадру. Якщо електронний пристрій 1237 визначає 1608, що новий кадр прийнятий правильно, електронний пристрій 1237 може застосовувати 1610 прийнятий ваговий вектор для генерації проміжного вектора LSF поточного кадру. Наприклад, електронний пристрій 1237 може використовувати поточний ваговий вектор для проміжної LSF поточного кадру (спочатку не замінюючи її). Відповідно, для всіх (правильно прийнятих) наступних кадрів, доки не використовуються методи квантування LSF без прогнозування, декодер може застосовувати 1610 прийнятий ваговий вектор для генерації проміжного вектора LSF поточного кадру і визначати 1612, чи впорядкований проміжний вектор LSF поточного кадру відповідно до правила до будь-якого перевпорядкування. Наприклад, електронний пристрій 1237 може застосовувати 1610 ваговий вектор на основі індексу, що передається від кодера, для інтерполяції проміжного вектора LSF. Потім електронний пристрій 1237 може визначати 1612, чи впорядкований проміжний вектор LSF поточного кадру, що відповідає кадру таким чином, що до будь-якого перевпорядкування. [00164] Порушення правила свідчить про потенційну нестабільність проміжного вектора LSF. Наприклад, якщо електронний пристрій 1237 визначає 1612, що проміжний вектор LSF, який відповідає кадру, не впорядкований відповідно до правила до будь-якого перевпорядкування, електронний пристрій 1237 відповідно визначає, що вимірювання LSF в проміжному векторі LSF потенційно нестабільні. Декодер 1208 може заглушувати потенційну нестабільність шляхом застосування 1604 вагового значення замісника, як описано вище. [00165] Якщо проміжний вектор LSF поточного кадру впорядкований відповідно до правила, електронний пристрій 1237 може визначати 1614, чи використовує поточний кадр квантування з прогнозуванням. Якщо поточний кадр використовує квантування з прогнозуванням, електронний пристрій 1237 може застосовувати 1604 вагове значення замісника, як описано вище. Якщо електронний пристрій 1237 визначає 1614, що поточний кадр не використовує квантування з прогнозуванням (наприклад, що поточний кадр використовує квантування без прогнозування), електронний пристрій 1237 може визначати 1616, чи правильно прийнятий новий кадр. Якщо новий кадр прийнятий неправильно (наприклад, якщо новий кадр є видаленим кадром), операція може перейти до прийому 1602 поточного кадру після видаленого кадру. [00166] Якщо поточний кадр використовує квантування без прогнозування і якщо електронний пристрій 1237 визначає 1616, що новий кадр прийнятий правильно, декодер 1208 продовжує працювати нормально, використовуючи прийнятий ваговий вектор, який використовується в регулярному режимі роботи. Іншими словами, електронний пристрій 1237 може застосовувати 1618 прийнятий ваговий вектор на основі індексу, що передається від кодера, для інтерполяції проміжного вектора LSF для кожного правильно прийнятого кадру. Зокрема, електронний пристрій 1237 може застосовувати 1618 прийнятий ваговий вектор на основі індексу, прийнятого від кодера, для кожного наступного кадру (наприклад, n+nnp+1, n+nnp+2, тощо, де nnp - номер кадру для кадру, який використовує квантування без прогнозування), доки не виникне видалений кадр. [00167] Розкриті тут системи та способи можна реалізувати в декодері 1208. У деяких конФігураціях, ніякі додаткові біти не потрібно передавати від кодера на декодер 1208 для забезпечення виявлення і заглушення потенційної нестабільності кадру. Крім того, розкриті тут системи та способи не знижують якість в умовах чистого каналу. [00168] На Фіг. 17 показаний графік, що демонструє приклад синтезованого мовного сигналу. По горизонтальній осі графіка відкладений час 1701 (наприклад, в секундах), і по вертикальній осі графіка відкладена амплітуда 1733 (наприклад, число, значення). Амплітуда 1733 може бути числом, вираженим в бітах. У деяких конФігураціях, 16 бітів можна використовувати для представлення вибірок мовного сигналу, значення якого вміщене в межах 24 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 від -32768 до 32767, що відповідає діапазону (наприклад, значенню від -1 до +1 в форматі плаваючої коми). Потрібно зазначити, що амплітуду 1733 можна представляти по-різному залежно від реалізації. У деяких прикладах, значення амплітуди 1733 може відповідати електромагнітному сигналу, що характеризується напругою (у вольтах) і/або струмом (в амперах). [00169] Розкриті тут системи та способи можна реалізувати для генерації синтезованого мовного сигналу, показаного на Фіг. 17. Іншими словами, на Фіг. 17 показаний графік, що демонструє один приклад синтезованого мовного сигналу, одержаного із застосуванням розкритих тут систем та способів. Відповідна форма хвилі без застосування розкритих тут систем та способів, показана на Фіг. 11. Як можна бачити, розкриті тут системи та способи забезпечують заглушення 1777 артефактів. Іншими словами, артефакти 1135, проілюстровані на Фіг. 11, заглушуються або віддаляються шляхом застосування розкритих тут систем та способів, як проілюстровано в Фіг. 17. [00170] На Фіг. 18 показана блок-схема, що демонструє одну конФігурацію пристрою 1837 бездротового зв'язку, в якому можна реалізувати системи та способи для заглушення потенційної нестабільності кадру. Пристрій 1837 бездротового зв'язку, проілюстрований на Фіг. 18, може бути прикладом щонайменше одного з описаних тут електронних пристроїв. Пристрій 1837 бездротового зв'язку може включати в себе процесор 1893 додатків. Процесор 1893 додатків, в цілому, обробляє інструкції (наприклад, виконує програми) для здійснення функцій на пристрої 1837 бездротового зв'язку. Процесор 1893 додатків може бути підключений до аудіокодера/декодера (кодека) 1891. [00171] Аудіокодек 1891 можна використовувати для кодування і/або декодування аудіосигналів. Аудіокодек 1891 може бути підключений до щонайменше одного гучномовця 1883, навушника 1885, вихідного гнізда 1887 і/або щонайменше одного мікрофона 1889. Гучномовці 1883 можуть включати в себе один або більше електроакустичних перетворювачів, які перетворюють електричні або електронні сигнали в акустичні сигнали. Наприклад, гучномовці 1883 можна використовувати для відтворення музики або виведення розмови, здійснюваної в режимі гучного зв'язку, тощо. Навушник 1885 може бути ще одним гучномовцем або електроакустичним перетворювачем, який можна використовувати для виведення акустичних сигналів (наприклад, мовних сигналів) користувачу. Наприклад, навушник 1885 можна використовувати таким чином, щоб тільки користувач міг чітко чути акустичний сигнал. Вихідне гніздо 1887 можна використовувати для підключення інших пристроїв до пристрою 1837 бездротового зв'язку для виведення аудіосигналу, наприклад головних телефонів. Гучномовці 1883, навушник 1885 і/або вихідне гніздо 1887, в цілому, можна використовувати для виведення аудіосигналу з аудіокодека 1891. Щонайменше один мікрофон 1889 може бути акустоелектричним перетворювачем, який перетворює акустичний сигнал (наприклад, голос користувача) в електричні або електронні сигнали, які надходять на аудіокодек 1891. [00172] Аудіокодек 1891 (наприклад, декодер) може включати в себе модуль 1861 визначення параметра кадру, модуль 1869 визначення стабільності і/або модуль 1865 заміщення вагового значення. Модуль 1861 визначення параметра кадру, модуль 1869 визначення стабільності і/або модуль 1865 заміщення вагового значення можуть функціонувати, як описано вище в зв'язку з Фіг. 12. [00173] Процесор 1893 додатків також може бути підключений до схеми 1804 керування потужністю. Одним прикладом схеми 1804 керування потужністю є інтегральна схема керування потужністю (PMIC), яку можна використовувати для керування споживанням електричної потужності пристроєм 1837 бездротового зв'язку. Схема 1804 керування потужністю може бути підключена до батареї 1806. Батарея 1806, в цілому, може забезпечувати пристрій 1837 бездротового зв'язку електричною потужністю. Наприклад, батарея 1806 і/або схема 1804 керування потужністю може бути підключена до щонайменше одного з елементів, включених в пристрій 1837 бездротового зв'язку. [00174] Процесор 1893 додатків може бути підключений до щонайменше одного пристрою 1808 введення для прийому введення. Приклади пристроїв 1808 введення включають в себе інфрачервоні датчики, датчики зображення, акселерометри, тактильні датчики, кнопкові панелі тощо. Пристрої 1808 введення можуть допускати взаємодію користувача з пристроєм 1837 бездротового зв'язку. Процесор 1893 додатків також може бути підключений до одного або більше пристроїв 1810 виведення. Приклади пристроїв 1810 виведення включають в себе принтери, проектори, екрани, тактильні пристрої. Пристрої 1810 виведення можуть дозволяти пристрою 1837 бездротового зв'язку формувати вихідний сигнал, який може сприйматися користувачем. 25 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 [00175] Процесор 1893 додатків може бути підключений до пам'яті 1812 додатків. Пам'яттю 1812 додатків може бути будь-який електронний пристрій, здатний зберігати електронну інформацію. Приклади пам'яті 1812 додатків включають в себе синхронну динамічну оперативну пам'ять з подвійною швидкістю передачі даних (DDRAM), синхронну динамічну оперативну пам'ять (SDRAM), флеш-пам'ять тощо. Пам'ять 1812 додатків може забезпечувати сховище для процесора 1893 додатків. Наприклад, пам'ять 1812 додатків може зберігати дані і/або інструкції для функціонування програм, які виконуються на процесорі 1893 додатків. [00176] Процесор 1893 додатків може бути підключений до контролера 1814 дисплея, який, в свою чергу, може бути підключений до дисплея 1816. Контролер 1814 дисплея може являти собою апаратний блок, який використовується для генерації зображень на дисплеї 1816. Наприклад, контролер 1814 дисплея може перетворювати інструкції і/або дані з процесора 1893 додатків в зображення, які можуть представлятися на дисплеї 1816. Приклади дисплея 1816 включають в себе рідкокристалічні відображаючі панелі (LCD), світлодіодні (LED) панелі, дисплеї на основі електронно-променевої трубки (CRT), плазмові дисплеї тощо. [00177] Процесор 1893 додатків може бути підключений до процесора 1895 основної смуги. Процесор 1895 основної смуги, в цілому, обробляє сигнали зв'язку. Наприклад, процесор 1895 основної смуги може демодулювати і/або декодувати прийняті сигнали. Додатково або альтернативно, процесор 1895 основної смуги може кодувати і/або модулювати сигнали при підготовці до передачі. [00178] Процесор 1895 основної смуги може бути підключений до пам'яті 1818 основної смуги. Пам'яттю 1818 основної смуги може бути будь-який електронний пристрій, здатний зберігати електронну інформацію, наприклад, SDRAM, DDRAM, флеш-пам'ять тощо. Процесор 1895 основної смуги може зчитувати інформацію (наприклад, інструкції і/або дані) з і/або записувати інформацію в пам'ять 1818 основної смуги. Додатково або альтернативно, процесор 1895 основної смуги може використовувати інструкції і/або дані, що зберігаються в пам'яті 1818 основної смуги, для здійснення операцій зв'язку. [00179] Процесор 1895 основної смуги може бути підключений до радіочастотного (RF) приймач-передавача 1897. RF приймач-передавач 1897 може бути підключений до підсилювача 1899 потужності і однієї або більше антен 1802. RF приймач-передавач 1897 може передавати і/або приймати радіочастотний сигнали. Наприклад, RF приймач-передавач 1897 може передавати RF сигнал з використанням підсилювача 1899 потужності і щонайменше однієї антени 1802. RF приймач-передавач 1897 також може приймати RF сигнали з використанням однієї або більше антен 1802. Потрібно зазначити, що один або більше з елементів, включених в пристрій 1837 бездротового зв'язку, може бути підключено до загальної шини, яка може забезпечувати зв'язок між елементами. [00180] Фіг. 19 демонструє різні компоненти, які можна використовувати в електронному пристрої 1937. Проілюстровані компоненти можуть розташовуватися в одній і тій самій фізичній структурі або в окремих корпусах або структурах. Електронний пристрій 1937, описаний в зв'язку з Фіг. 19, можна реалізувати відповідно до одного або більше з описаних тут електронних пристроїв. Електронний пристрій 1937 включає в себе процесор 1926. Процесором 1926 може бути одно- або багатокристальний мікропроцесор загального призначення (наприклад, ARM), мікропроцесор спеціального призначення (наприклад, цифровий сигнальний процесор (DSP)), мікроконтролер, програмована вентильна матриця тощо. Процесор 1926 може іменуватися центральним процесором (CPU). Хоча в електронному пристрої 1937, представленому на Фіг. 19, показаний один єдиний процесор 1926, в альтернативній конФігурації, можна використовувати комбінацію процесорів (наприклад, ARM та DSP). [00181] Електронний пристрій 1937 також включає в себе пам'ять 1920, що здійснює електронний зв'язок з процесором 1926. Таким чином, процесор 1926 може зчитувати інформацію з і/або записувати інформацію в пам'ять 1920. Пам'яттю 1920 може бути будь-який електронний компонент, здатний зберігати електронну інформацію. Пам'яттю 1920 може бути оперативна пам'ять (RAM), постійна пам'ять (ROM), носії даних на основі магнітного диска, оптичні носії даних, пристрої флеш-пам'яті в RAM, вбудована пам'ять, об'єднана з процесором, програмована постійна пам'ять (PROM), стирана програмована постійна пам'ять (EPROM), електрично стирана PROM (EEPROM), регістри тощо, включаючи їх комбінації. [00182] У пам'яті 1920 можуть зберігатися дані 1924a та інструкції 1922a. Інструкції 1922a можуть включати в себе одну або більше програм, процедур, підпроцедур, функцій, операцій тощо. Інструкції 1922a можуть включати в себе комп'ютерно-зчитуваний одиничний оператор або багато комп'ютерно-зчитуваних операторів. Інструкції 1922a можуть виконуватися процесором 1926 для реалізації один або більше з вищеописаних способів, функцій та процедур. Виконання інструкцій 1922a може передбачати використання даних 1924a, що 26 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 зберігаються в пам'яті 1920. Фіг. 19 демонструє деякі інструкції 1922b і дані 1924b, що завантажуються в процесор 1926 (які можуть походити з інструкцій 1922a і даних 1924a). [00183] Електронний пристрій 1937 також може включати в себе один або більше інтерфейсів 1930 зв'язку для здійснення зв'язку з іншими електронними пристроями. Інтерфейси 1930 зв'язку можуть базуватися на технології дротового зв'язку, технології бездротового зв'язку або обох. Приклади різних типів інтерфейсів 1930 зв'язку включають в себе послідовний порт, паралельний порт, універсальну послідовну шину (USB), адаптер Ethernet, інтерфейс шини IEEE 1394, інтерфейс шини інтерфейсу малих комп'ютерних систем (SCSI), інфрачервоний (IR) комунікаційний порт, адаптер бездротового зв'язку Bluetooth тощо. [00184] Електронний пристрій 1937 також може включати в себе один або більше пристроїв 1932 введення і один або більше пристроїв 1936 виведення. Приклади різних видів пристроїв 1932 введення включають в себе клавіатуру, мишу, мікрофон, пристрій дистанційного керування, кнопку, джойстик, кульовий маніпулятор, сенсорну панель, світлове перо тощо. Наприклад, електронний пристрій 1937 може включати в себе один або більше мікрофонів 1934 для захоплення акустичних сигналів. В одній конФігурації, мікрофоном 1934 може бути перетворювач, який перетворює акустичні сигнали (наприклад, голос, мовний сигнал) в електричні або електронні сигнали. Приклади різних видів пристроїв 1936 виведення включають в себе гучномовець, принтер тощо. Наприклад, електронний пристрій 1937 може включати в себе один або більше гучномовців 1938. В одній конФігурації, гучномовцем 1938 може бути перетворювач, який перетворює електричні або електронні сигнали в акустичні сигнали. Одним конкретним типом пристрою виведення, який звичайно включений в електронний пристрій 1937, є пристрій 1940 відображення. Пристрої 1940 відображення, що використовуються з розкритими тут конФігураціями, можуть використовувати будь-яку придатну технологію проекції зображення, наприклад електронно-променеву трубку (CRT), рідкокристалічний дисплей (LCD), світлодіод (LED), газову плазму, електролюмінесценцію тощо. Також може бути передбачений контролер 1942 дисплея, для перетворення даних, що зберігаються в пам'яті 1920, в текст, графіку, і/або рухомі зображення (при необхідності), показані на пристрої 1940 відображення. [00185] Різні компоненти електронного пристрою 1937 можуть бути з'єднані один з одним однією або більше шинами, які можуть включати в себе шину живлення, шину сигналу керування, шину сигналу стану, шину даних тощо. Для простоти, різні шини проілюстровані на Фіг. 19 у вигляді шинної системи 1928. Потрібно зазначити, що Фіг. 19 демонструє тільки одну можливу конФігурацію електронного пристрою 1937. Можна використовувати різні інші архітектури і компоненти. [00186] У вищенаведеному описі, посилальні позиції іноді використовуються в зв'язку з різними термінами. Коли термін використовується в зв'язку з посилальним номером, це може мати значення відносно конкретного елемента, показаного на одній або більше з Фігур. Коли термін використовується без посилального номера, це може мати значення, в цілому, відносно терміну без обмеження якою-небудь конкретною Фігурою. [00187] Термін "визначення" охоплює найрізноманітніші дії, і тому "визначення" може включати в себе обчислення, розрахунок, обробку, одержання, дослідження, пошук (наприклад, пошук в таблиці, базу даних або іншу структуру даних), встановлення тощо. Також "визначення" може включати в себе прийом (наприклад, прийом інформації), здійснення доступу (наприклад, здійснення доступу до даних в пам'яті) тощо. Також "визначення" може включати в себе розв'язання, виділення, вибір, встановлення тощо. [00188] Вираз «на основі» не означає «на основі тільки…», якщо явно не вказане зворотне. Іншими словами, вираз «на основі» описує як «на основі тільки…», так і «на основі, щонайменше …». [00189] Потрібно зазначити, що один або більше з ознак, функцій, процедур, компонентів, елементів, структур тощо, описаних в зв'язку з будь-яким з описаних тут конфігурацій, можна об'єднувати з однією або більше з функцій, процедур, компонентів, елементів, структур тощо, описаних в зв'язку з будь-якою з інших описаних тут конфігурацій, коли сумісно. Іншими словами, будь-яке сумісне поєднання описаних тут функцій, процедур, компонентів, елементів тощо можна реалізувати відповідно до розкритих тут систем та способів. [00190] Описані тут функції можуть зберігатися у вигляді однієї або більше інструкцій на процесорно-зчитуваному або комп'ютерно-зчитуваному носії. Термін "комп'ютерно-зчитуваний носій" означає будь-який доступний носій, до якого може звертатися комп'ютер або процесор. У порядку прикладу, але не обмеження, такий носій може містити RAM, ROM, EEPROM, флешпам'ять, CD-ROM або інше сховище на основі оптичного диска, сховище на основі магнітного диска або інші магнітні запам'ятовуючі пристрої, або будь-який інший носій, який можна використовувати для зберігання бажаного програмного коду в формі інструкцій або структур 27 UA 115350 C2 5 10 15 20 25 30 35 40 45 50 55 60 даних і до яких може звертатися комп'ютер. Термін "диск", що використовується тут, включає в себе компакт-диск (CD), лазерний диск, оптичний диск, цифровий універсальний диск (DVD), ® флопі-диск і диск Blu-ray , де диски звичайно відтворюють дані магнітними засобами, тоді як диски відтворюють дані оптичними засобами за допомогою лазерів. Потрібно зазначити, що комп'ютерно-зчитуваний носій може бути матеріальним і нетранзиторним. Термін "комп'ютерний програмний продукт" означає обчислювальний пристрій або процесор спільно з кодом або інструкціями (наприклад, "програмою"), які можуть виконуватися, оброблятися або обчислюватися обчислювальним пристроєм або процесором. Термін "код", що використовується тут, може стосуватися програмного забезпечення, інструкцій, коду або даних, що виконується обчислювальним пристроєм або процесором. [00191] Програмне забезпечення або інструкції також можуть передаватися через середовище передачі. Наприклад, якщо програмне забезпечення передається з веб-сайта, сервера або іншого віддаленого джерела з використанням коаксіального кабелю, оптоволоконного кабелю, витої пари, цифрової абонентської лінії (DSL), або бездротових технологій, наприклад, інфрачервоної, радіо і мікрохвильової, то коаксіальний кабель, оптоволоконний кабель, вита пара, DSL або бездротові технології, наприклад, інфрачервона, радіо і мікрохвильова, включені у визначення середовища передачі. [00192] Розкриті тут способи містять один або більше етапів або дій для здійснення описаного способу. Етапи і/або дії способу можуть мінятися місцями один з одним, не виходячи за рамки обсягу формули винаходу. Іншими словами, якщо для належного виконання описаного способу не потрібний конкретний порядок етапів або дій, порядок і/або використання конкретних етапів і/або дій можна модифікувати, не виходячи за рамки обсягу формули винаходу. [00193] Потрібно розуміти, що формула винаходу не обмежуються конкретними проілюстрованими вище конФігурацією і компонентами. Можна запропонувати різні модифікації, зміни і зміни в компонуванні, експлуатації та деталях описаних тут систем, способів та пристрою, не виходячи за рамки обсягу формули винаходу. Посилальні позиції 102 мовний сигнал 104, 404 кодер 106 кодований мовний сигнал 108 декодер 110 декодований мовний сигнал 202 мовний сигнал 204 базова реалізація кодера 208 базова реалізація декодера 212 модуль аналізу 214 перетворення коефіцієнтів 216 блок квантування А 218 блок зворотного квантування А 220 зворотне перетворення коефіцієнтів А 222 аналізуючий фільтр 224 блок квантування B 226 кодований сигнал збудження 228 параметри фільтрації 230 блок зворотного квантування В 232 сигнал збудження 234 синтезуючий фільтр 236 блок зворотного квантування С 238 зворотне перетворення коефіцієнтів В 340 широкосмуговий мовний сигнал 342 широкосмуговий мовний кодер 344 набір фільтрів А 346a сигнал першої смуги 346b сигнал другої смуги 348 кодер першої смуги 350 кодер другої смуги 352 параметри фільтрації 354 кодований сигнал збудження 356 параметри кодування другої смуги 358 широкосмуговий мовний декодер 28
ДивитисяДодаткова інформація
Назва патенту англійськоюSystems and methods for mitigating potential frame instability
Автори англійськоюSubasingha, Subasingha Shaminda, Krishnan, Venkatesh, Rajendran, Vivek
Автори російськоюСубасингха Субасингха Шаминда, Кришнан Венкатэш, Раджендран Вивек
МПК / Мітки
МПК: G10L 19/005, G10L 19/07
Мітки: кадру, потенційно, способи, системі, заглушення, нестабільності
Код посилання
<a href="https://ua.patents.su/42-115350-sistemi-ta-sposobi-dlya-zaglushennya-potencijjno-nestabilnosti-kadru.html" target="_blank" rel="follow" title="База патентів України">Системи та способи для заглушення потенційної нестабільності кадру</a>
Системи та способи для визначення набору коефіцієнтів інтерполяції
Номер патенту: 114233
Опубліковано: 10.05.2017
Автори: Субасінгха Субасінгха Шамінда, Раджендран Вівек, Крішнан Венкатеш
МПК: G10L 19/005, G10L 19/07
Мітки: набору, способи, визначення, коефіцієнтів, системі, інтерполяції
Формула / Реферат:
1. Спосіб для визначення набору коефіцієнтів інтерполяції за допомогою електронного пристрою, який містить етапи, на яких:- визначають значення на основі властивості поточного кадру і властивості попереднього кадру;- визначають те, знаходиться чи ні значення за межами діапазону;- визначають набір коефіцієнтів інтерполяції на основі визначення, що значення знаходиться за межами діапазону, і індикатора режиму...
Системи та способи виконання регулювання посилення
Номер патенту: 114027
Опубліковано: 10.04.2017
Автори: Атті Венкатраман Срініваса, Крішнан Венкатеш
МПК: G10L 21/0264, G10L 21/038
Мітки: способи, посилення, регулювання, виконання, системі
Формула / Реферат:
1. Спосіб регулювання параметрів підсилення, який містить етапи, на яких:- визначають (304), на основі рознесення між парами спектральних ліній (LSP), асоційованого з кадром аудіосигналу, те, що аудіосигнал включає в себе компонент, який відповідає умові формування артефактів; і- у відповідь на визначення...
Пристрій формування основного кадру
Номер патенту: 53867
Опубліковано: 25.10.2010
Автори: Конюхов Станіслав Миколайович, Немчин Олександр Федорович, Яковлев Віталій Васильович, Курячий Євген Віталійович, Свириденко Анатолій Олексійович, Колесник Костянтин Іванович, Горбулін Володимир Павлович
МПК: H01L 25/00, H01L 27/00, H05K 1/00, G01D 5/00
Мітки: кадру, пристрій, основного, формування
Формула / Реферат:
1. Пристрій формування основного кадру, що містить блок управління і формування, блок живлення, перший, другий, третій, четвертий, п'ятий, шостий та сьомий роз'єми для під'єднання локальних комутаторів та джерел електроживлення, при цьому перший вихід блока управління і формування з'єднано багатоканальною лінією зв'язку з входом першого роз’єму, другий вихід блока управління і формування з'єднано багатоканальною лінією зв'язку з входом...
Системи та способи для генерації та декодування коротких кадрів при бездротовому зв’язку
Номер патенту: 113423
Опубліковано: 25.01.2017
Автори: Вентінк Мартен Мензо, Мерлін Сімоне, Цюань Чжи, Абрахам Сантош Пол, Астерджадхі Альфред
МПК: H04L 1/00, H04W 52/02, H04W 28/06, H04W 52/54
Мітки: бездротовому, коротких, декодування, способи, кадрів, генерації, системі, зв'язку
Формула / Реферат:
1. Спосіб бездротового зв'язку, який містить етапи, на яких:генерують кадр, що містить преамбулу фізичного рівня, яка має поле сигналу, причому поле сигналу містить:індикатор, який вказує, що поле сигналу кодується з множиною полів, які містять інформацію, пов'язану з типом кадру; іполе циклічного контролю за надмірністю;кодують зазначену множину полів, які містять інформацію, пов'язану з типом кадру, в полі...
Системи і способи виявлення наявності передавального сигналу у каналі безпровідного зв’язку
Номер патенту: 93115
Опубліковано: 10.01.2011
Автор: Шеллхаммер Стефен Дж.
МПК: H04B 1/00, H04B 1/44, H04B 1/06
Мітки: способи, каналі, системі, зв'язку, виявлення, безпровідного, сигналу, передавального, наявності
Формула / Реферат:
1. Спосіб виявлення наявності передавального сигналу у каналі діапазону безпровідного зв'язку, що містить:перетворення частоти сигналу з першої частоти у другу частоту;фільтрацію сигналу другої частоти для видалення сигналів, що не попадають у смугу пропускання другої частоти;перетворення сигналу другої частоти у комплексний модулюючий сигнал;обчислення усередненої періодограми комплексного модулюючого...
Попередній патент: Лінійний селектор
Наступний патент: Спосіб дезактивації радіоактивних відпрацьованих фільтруючих матеріалів витісненням
Випадковий патент: Придатна для розпилення композиція, що містить екстракт із листя червоного винограду