Суднова система моніторингу для попередження ефекту коанда
Номер патенту: 100819
Опубліковано: 10.08.2015
Автори: Нікольський Віталій Валентинович, Будашко Віталій Віталійович, Хнюнін Сергій Гергійович
Формула / Реферат
Суднова система моніторингу гвинтокермової установки для попередження ефекту Коанда, яка відрізняється тим, що містить п'єзодатчики, які розташовані подовж окружності дейдвудного підшипника валопроводу гвинтокермової установки, блок перетворювачів та мікроконтролер з видачею інформації по інтерфейсу RS-485.
Текст
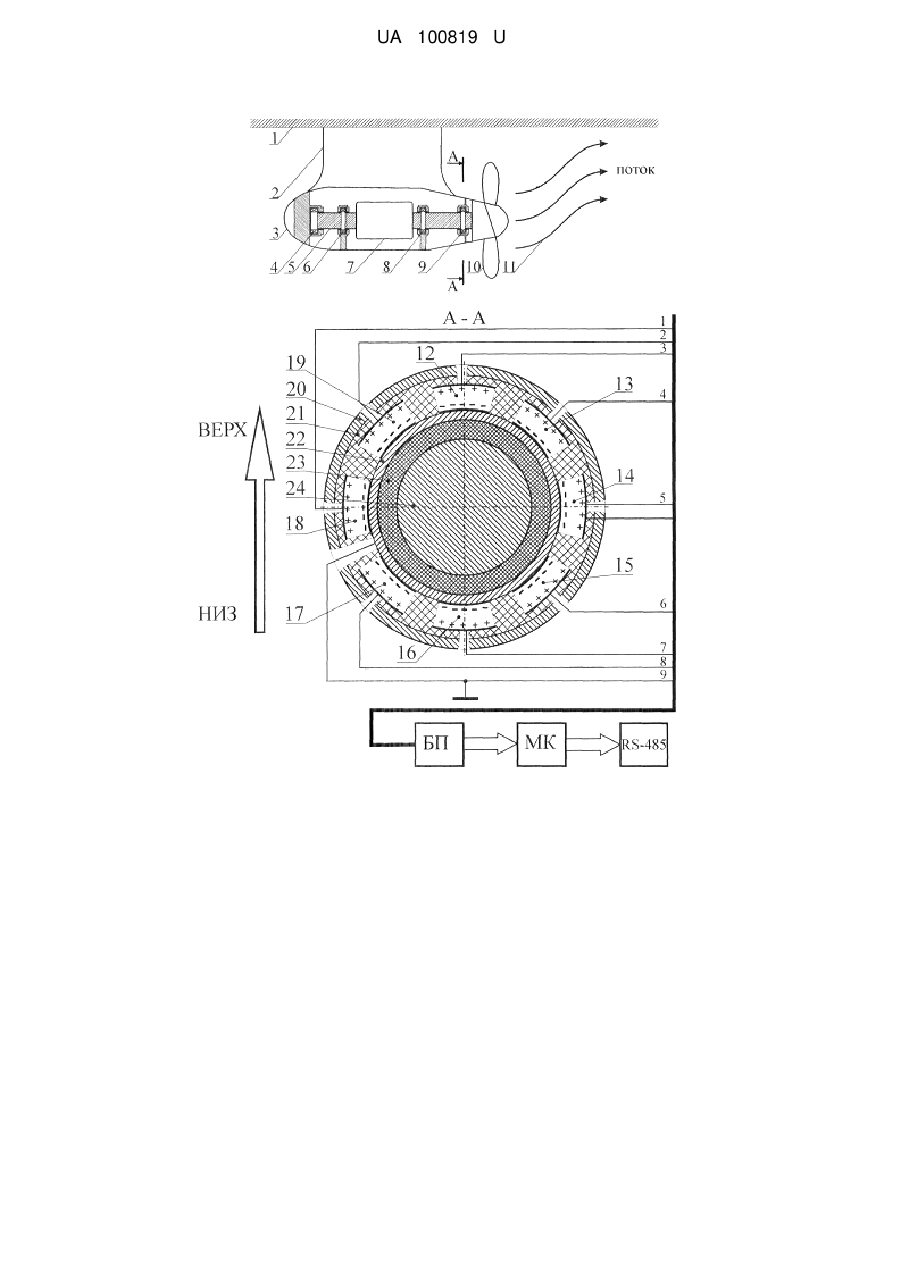
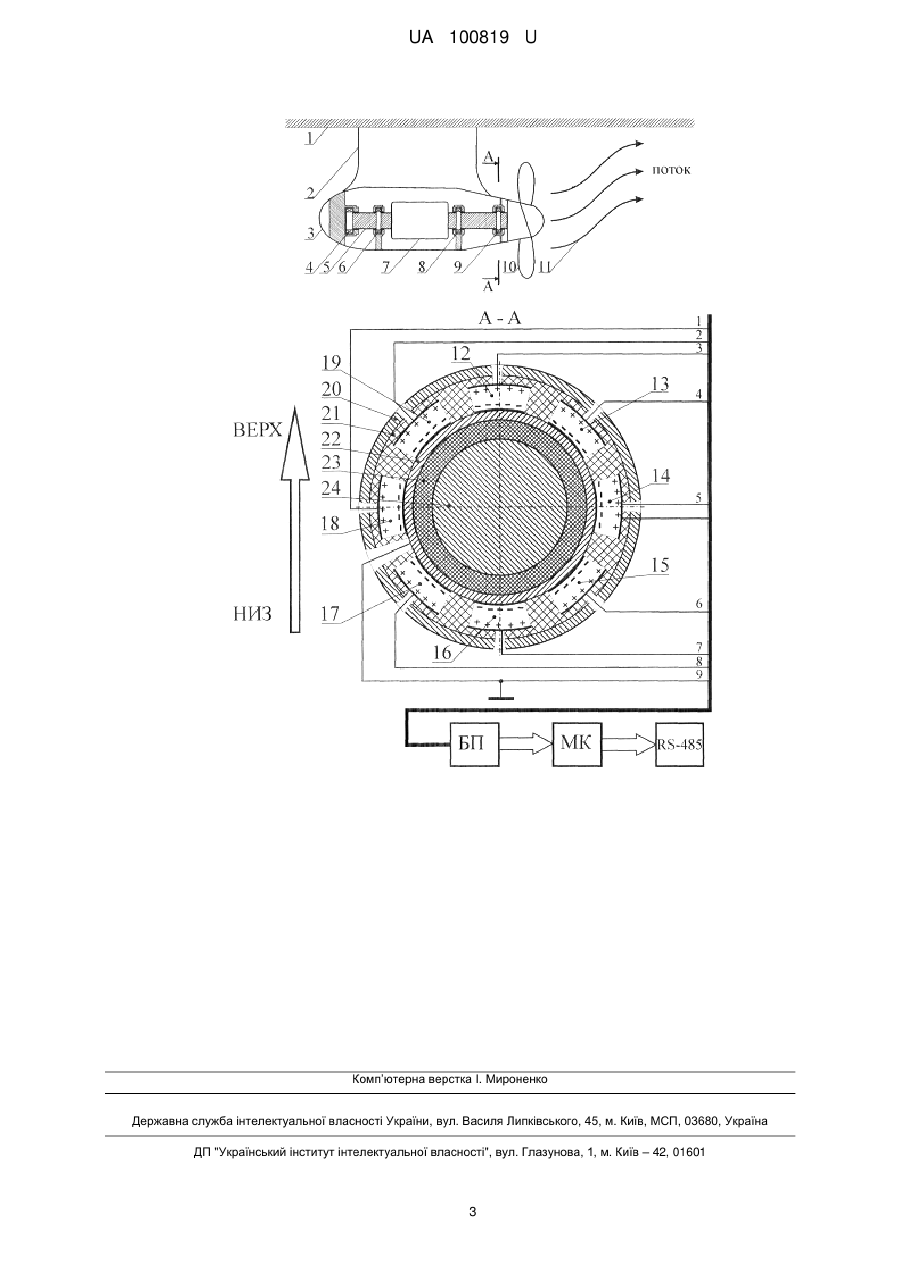
Реферат: Суднова система моніторингу гвинтокермової установки для попередження ефекту Коанда містить п'єзодатчики, які розташовані подовж окружності дейдвудного підшипника валопроводу гвинтокермової установки, блок перетворювачів та мікроконтролер з видачею інформації по інтерфейсу RS-485. UA 100819 U (12) UA 100819 U UA 100819 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем моніторингу положення гвинтокермової установки (ГКУ) для попередження ефекту Коанда, що встановлюється на великі яхти і пасажирські судна, судна змішаного (ріка-море) плавання, буксири, рятувальні судна, плавучі бурові платформи та науково-дослідні судна, криголамні та військові кораблі прибережної зони [1-4]. Відома система на даний час складається з механічної протидії ефекту Коанда за рахунок нахилу балера всієї конструкції ще на етапі конструювання гвинтокермової установки для надання напрямку потоку води під кутом від днища судна [5]. Недоліки системи проявляються в зниженні загального коефіцієнта корисної дії конструкції за рахунок направлення потоку води не паралельно днищу судна. Іншим недоліком системи є те, що при роботі гвинто-кермової установки в реверсному режимі потік води вже направлений до днища судна, що викликає сприятливі умови для виникнення ефекту Коанда і в свою чергу призводить до втрати керованості судна. Найбільш близьким за технічною суттю та результатом, що досягається, до винаходу, що пропонується, є спосіб укладання гвинта в трубу з пелюстковими відбивачами або направляючу насадку [6]. У цьому випадку потік води постійно спрямований у бік, компенсуючи можливе виникнення ефекту Коанда. Недоліки системи, які обумовлені використанням направляючої насадки [7,8]: корпус насадки в тому місці, де лопаті гвинта найбільш підходять близько, піддається сильній корозії; при маневруванні з-за нахилу потоку спостерігається сильна вібрація ГКУ; при обростанні насадки шаром морських рослин і тварин ефективність ГКУ судна помітно падає; загальна конструкція гвинта з насадкою складніше у конструюванні і дорожче у виготовленні; постійне збільшене тертя потоку води скрізь направляючу насадку навіть у той час, коли ефект Коанда не проявляється; при роботі в реверсному режимі струмінь води вже направлена до днища судна посилюючи ефект Коанда. Задачею корисної моделі є створення системи моніторингу виникнення ефекту Коанда для подальшої мінімізації підвищеного зносу дейдвудного, упорного і опорних підшипників гвинтокермової установки. Поставлена задача вирішується тим, що суднова система моніторингу гвинтокермової установки для попередження ефекту Коанда, яка відрізняється тим, що містить п'єзодатчики, які розташовані подовж окружності дейдвудного підшипника валопроводу гвинтокермової установки, блок перетворювачів та мікроконтролер з видачею інформації по інтерфейсу RS-485. Технічний ефект досягається завдяки тому, що ефект Коанда полягає в тому, що струмінь води, що проходить через гвинт судна, прагне відхилитися у напрямку до днища і при певних умовах "прилипає" до неї. В процесі цього відхилення на гвинт з валопроводом починає діяти сила в напрямку дії ефекту. В результаті, по-перше, валопровід в свою чергу впливає на дейдвудний, упорний та опорні підшипники, що призводить до нерівномірного зносу останніх. По-друге, внаслідок прояву ефекту Коанда виникають труднощі з утриманням позиції судна. У зв'язку з конструктивною особливістю знаходження всій ГКУ нижче ватерлінії під днищем судна ускладнений підхід до діагностики, планового обслуговування і ремонту. На кресленні зображено ГКУ, яка змонтована на судні і напрям потоку при виникненні ефекту Коанда. Система містить: 1 - днище судна; 2 - балл ер; 3 - силова гондола; 4 - упорний підшипник; 5 валопровід; 6 та 8 - опорні підшипники; 7 - механічний або електричний пристрій; 9 - дейдвудний підшипник; 10 - гвинт; 11 - напрям потоку води. При виникненні ефекту Коанда гвинт 10 з валопроводом 5 під дією потоку води 11 зміщується вгору до днища 1, що призводить до нерівномірного зносу дейдвудного 9, упорного 4 та опорних підшипників 6, 8. У розрізі за А - А зображено принципова схема підключення системи моніторингу. Схема підключення містить: 12-19 - п'єзодатчики; 20 - корпус судна; 21 - діелектричний шар; 22 - негативний полюс; 23 - дейдвудний підшипник; 24 - валопровід; БП - блок перетворювачів; МК - мікроконтролер; RS-485 - інтерфейс промислового Ethernet. Робота складається з двох етапів: у стані спокою при відсутності ефекту Коанда сумарна напруга на електродах п'єзодатчиків 12-19 дорівнює нулю; в робочому стані при виникненні ефекту Коанда сумарна напруга на електродах п'єзодатчиків не дорівнює нулю. У цьому стані при виникненні ефекту Коанда валопровід 24 1 UA 100819 U 5 10 15 20 25 30 35 40 зміщується вгору і тисне на дейдвудний підшипник 23, який деформує п'єзодатчик 12. П'єзодатчик перетворює механічну деформацію в електричний сигнал, який подається по шині даних через блок перетворювачів БП на мікроконтролер МК і далі в промислову мережу Ethernet. Елементи винаходу можуть бути реалізовані згідно з відомими схемами: п'єзодатчики 12-19 (креслення) фірми Kеро Electronics типу MFT [9] або вібрації LDT0-028K [10]; блок перетворювачів (БП) - вимірювальні перетворювачі сигналів напруги від Phoenix Contact (креслення) MCR-VAC-UI-O-DC-2811103 [11]; мікроконтролер (МК) від Phoenix Contact (креслення) ILC 1xx-3хх серій [12]; інтерфейс RS-485 - функціональні модулі клемні Inline від Phoenix Contact (креслення) IB IL RS 485/422-2MBD-PAC-2862097 [13]. Джерела інформації: 1. Contra-rotating Azipod propulsion selected for Japanese fast ferries // The Naval Architect, June 2003, p. 6. 2. Highly manoeuvrable CRP Azipod solution for big boxships // MER, Oct. 2001, pp. 43-44. 3. Kurimo R., Poustoshniy A. V., Syrkin E. N. Azipod propulsion for passenger cruisers // NAV & HSMV International Conference, Sorrento, 18-21 March 1997. 4. IB Rothelstein, river icebreaker with Azipod propulsion for Osterreichische Donaukraftwerke AG // Ship & Boat, June 1995. 5. Представление движителей Azipod серии VI [Електронний ресурс]. http://www05.abb.com/global/scot/scot293.nsf/veritydisplay/908eb000f6546300cl 2577е5004191 aa/$file/azipod_vi_project_guide_ru.pdf. 6. Комплекс движительный гребной винт - направляющая насадка. Методика расчета и правила проектирования Текст.: ОСТ 5.4129-75. - М.: Изд-во стандартов, 1975.-202 с. 7. Судоремонт от А до Я. Направляющие насадки [Електронний ресурс]. http://sudoremont.blogspot.com/2014/07/napravlyaushie-nasadki.html. 8. Антоненко СВ. Судовые движители: учебное пособие. -Владивосток: ДВГТУ, 2007.-126 с. 9. Керо Electronics. Piezoelectric Element. Ceramic self-drive [Електронний ресурс]. : : http://www.chinaacoustic.com/prodList.php?type =0&fid=l&sid =18. 10. Measurement Specialties. Piezo Film Product Guide [Електронний ресурс]. - http://measspec.com/downloads/Piezo_Film_Product_Guide.pdf. 11. Список продукції Phoenix Contact: перетворювачі напруги змінного і постійного струму [Електронний ресурс]. https://www.phoenixcontact.com /online/portal/ua?uri=pxc-ocitemdetail:pid=2811103&library=uauk&tab=1. 12. Краткий каталог продукции Phoenix Contact 2014. Контроллеры. - С. 165 [Електронний ресурс]. https://www.phoenixcontact.com/assets /downloads_ed/local_ru/web_dwl_promotion/ KrakiyCatalog2014.pdf. 13. Список продукції Phoenix Contact: компоненти для систем введення/виведення [Електронний ресурс]. https://www.phoenixcontact.com /online/portal/ua?uri=pxc-ocitemdetail:pid=2862097&library=uauk&tab=1. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Суднова система моніторингу гвинтокермової установки для попередження ефекту Коанда, яка відрізняється тим, що містить п'єзодатчики, які розташовані подовж окружності дейдвудного підшипника валопроводу гвинтокермової установки, блок перетворювачів та мікроконтролер з видачею інформації по інтерфейсу RS-485. 2 UA 100819 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01L 9/08, G01L 1/16, G01L 5/12
Мітки: моніторингу, суднова, ефекту, коанда, система, попередження
Код посилання
<a href="https://ua.patents.su/5-100819-sudnova-sistema-monitoringu-dlya-poperedzhennya-efektu-koanda.html" target="_blank" rel="follow" title="База патентів України">Суднова система моніторингу для попередження ефекту коанда</a>
Пристрій захисту відцентрового насоса від кавітації на базі ефекту коанда
Номер патенту: 90499
Опубліковано: 26.05.2014
Автори: Срібнюк Степан Михайлович, Забишний Віктор Іванович, Земогляд Вікторія Дмитрівна, Медведовський Валерій Володимирович, Медведовський Євген Валерійович
МПК: F04F 5/54
Мітки: відцентрового, базі, ефекту, коанда, кавітації, насоса, пристрій, захисту
Формула / Реферат:
1. Пристрій захисту відцентрового насоса від кавітації на базі ефекту Коанда, що включає робочий насос із всмоктувальним і напірним трубопроводами та байпасний трубопровід, який відрізняється тим, що усмоктувальний трубопровід насоса виконано з двох частин, які з'єднано на горизонтальній стороні всмоктувального трубопроводу за допомогою фланців, між якими утворено міжфланцевий внутрішній простір, а між стінками частин всмоктувального...
Суднова комбінована енергетична установка
Номер патенту: 89142
Опубліковано: 10.04.2014
Автори: Соломаха Андрій Сергійович, Петренко Валерій Георгійович, Панін Владислав Вадимович, Дикий Микола Олександрович
МПК: F02C 6/00
Мітки: суднова, енергетична, комбінована, установка
Формула / Реферат:
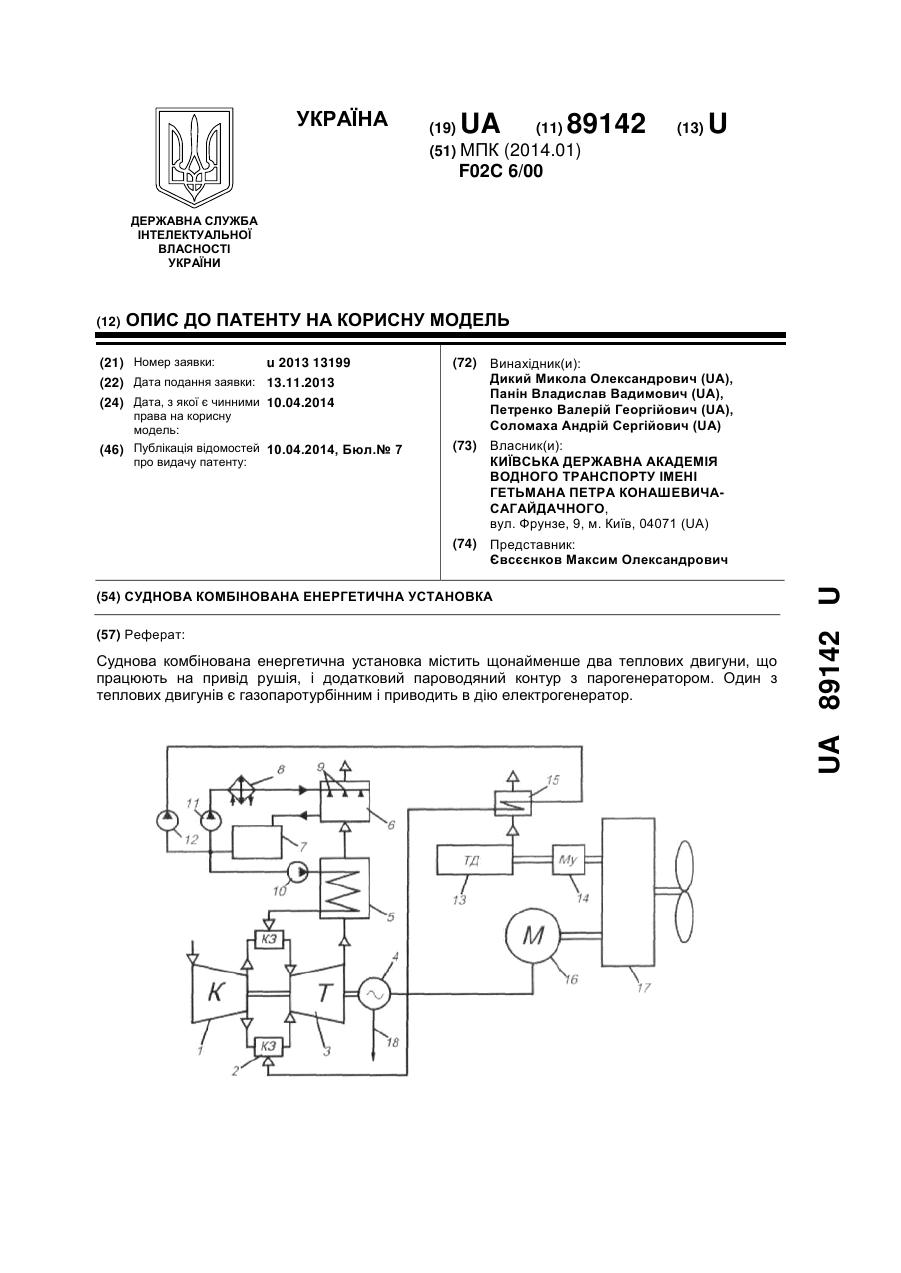
Суднова комбінована енергетична установка, що містить щонайменше два теплових двигуни, що працюють на привід рушія і один з яких є газопаротурбінним і приводить в дію електрогенератор, яка відрізняється тим, що містить додатковий пароводяний контур з парогенератором для утилізації теплоти відпрацьованих газів теплових двигунів з подальшим впорскуванням отриманої пари в камеру згоряння газопаротурбінного двигуна.
Система автоматичного моніторингу території
Номер патенту: 84133
Опубліковано: 10.10.2013
Автори: Пеліхатий Микола Михайлович, Ємець Володимір Михайлович, Гетманець Олег Михайлович
МПК: G08C 17/00, G01W 1/00
Мітки: території, моніторингу, автоматичного, система
Формула / Реферат:
1. Система автоматичного моніторингу території, що містить датчики екологічного контролю стану середовища, центральний диспетчерський пункт, засоби радіозв'язку, систему GPS та мобільну телефонну систему, яка відрізняється тим, що датчики екологічного контролю встановлюють на первинних постах контролю, кожен з яких являє собою автономний блок, розміром не більше 300×300×200 мм, причому від 10 до 300 первинних постів контролю...
Система віддаленого моніторингу залізничних поїздів
Номер патенту: 2777
Опубліковано: 16.08.2004
Автори: Гамбарян Григорій Рафаелович, Бондарь Сергій Іванович, Бандура Іван Миколайович, Макаренко Валентин Миколайович
МПК: G08B 17/06
Мітки: система, залізничних, моніторингу, віддаленого, поїздів
Формула / Реферат:
Система віддаленого моніторингу залізничних поїздів, яка складається із автоматизованого робочого місця (АРМ) начальників поїздів, кожне із яких містить обчислювальну машину, з'єднану з перетворювачем інтерфейсу, блоком індикації начальника поїзда і блоком живлення, АРМ провідників вагонів, кожне із яких містить перший процесор, з'єднаний з перетворювачем інтерфейсу, блоком індикації провідника і блоком живлення, пристроїв вимірювальних,...
Система віддаленого моніторингу залізничних поїздів
Номер патенту: 67711
Опубліковано: 12.03.2012
Автори: Бандура Іван Миколайович, Гамбарян Григорій Рафаелович, Бондарь Сергій Іванович
МПК: G08B 17/06
Мітки: віддаленого, поїздів, система, залізничних, моніторингу
Формула / Реферат:
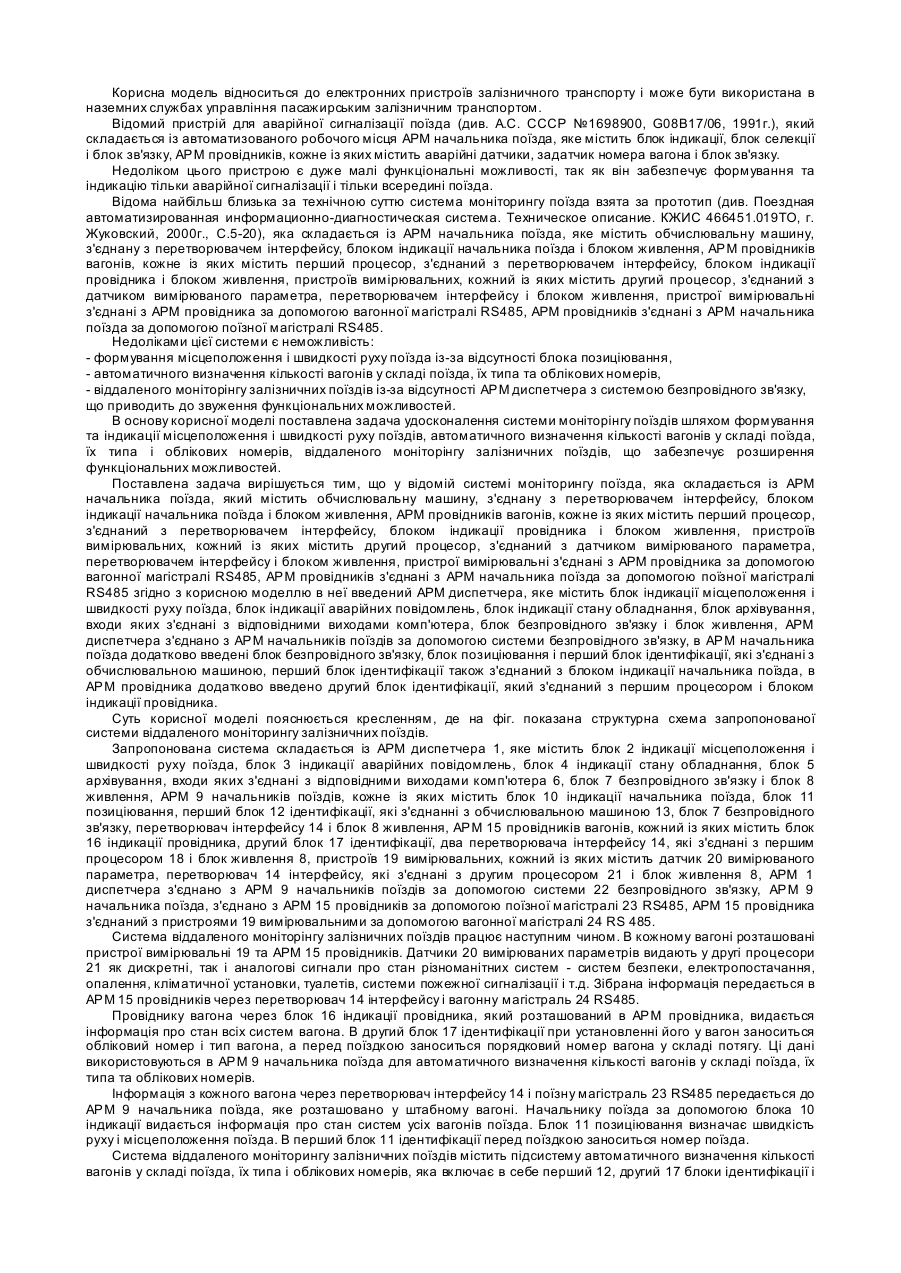
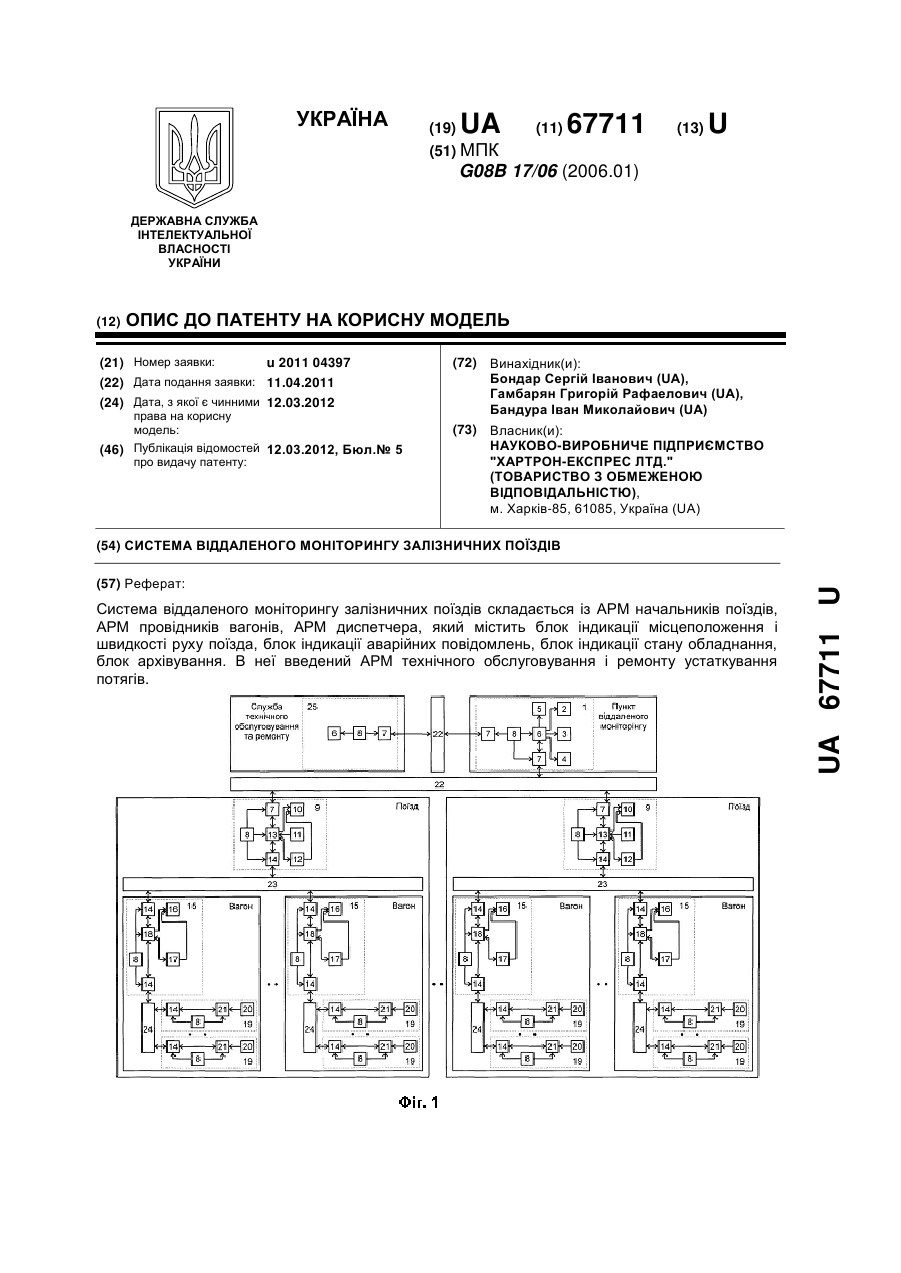
Система віддаленого моніторингу залізничних поїздів, що складається із АРМ начальників поїздів, кожний із яких містить обчислювальну машину, з'єднану з перетворювачем інтерфейсу, блоком індикації начальника поїзда і блоком живлення, АРМ провідників вагонів, кожний із яких містить перший процесор, з'єднаний з перетворювачем інтерфейсу, блоком індикації провідника і блоком живлення, пристроїв вимірювальних, кожний із яких містить другий...
Попередній патент: Спосіб одержання біопалива для дизельних двигунів
Наступний патент: Спосіб профілактики незаразних хвороб шлунково-кишкового тракту підсисних поросят
Випадковий патент: Спосіб диференційної діагностики ранніх стадій остеоартрозу великих суглобів