Пристрій для калібрування систем зважування і центрування літальних апаратів
Номер патенту: 102790
Опубліковано: 25.11.2015
Автори: Борзенкова Ганна Вікторівна, Черепащук Григорій Олександрович

Формула / Реферат
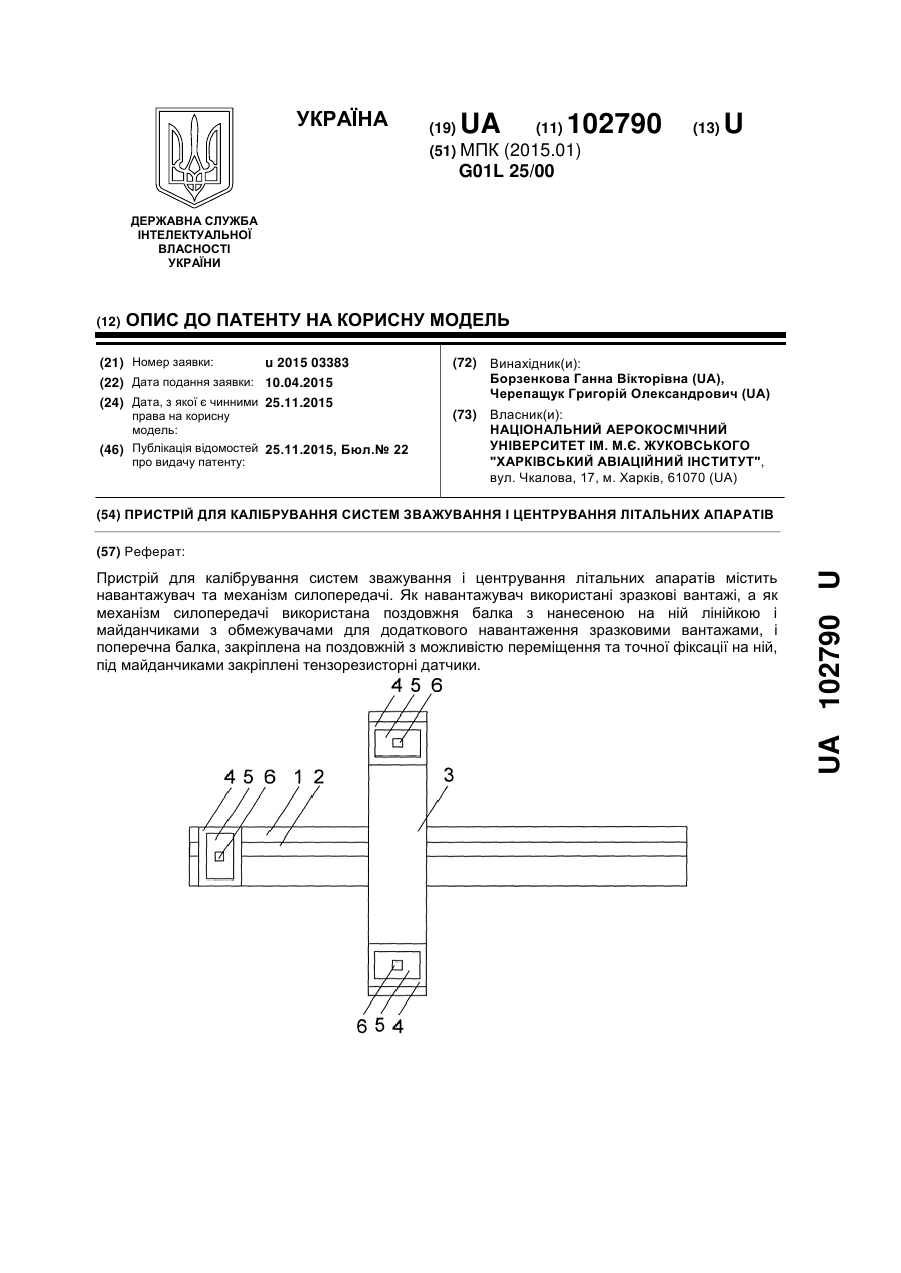
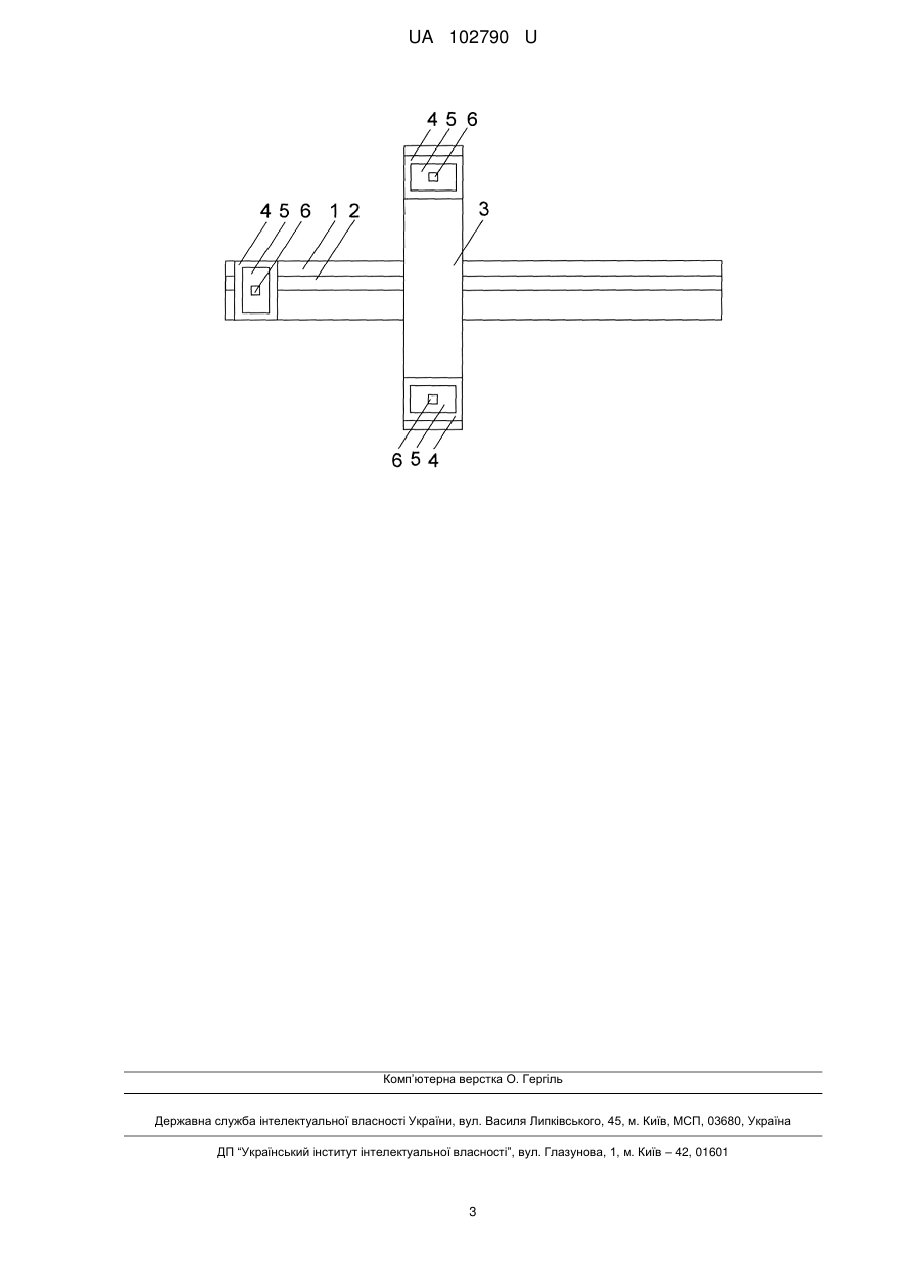
Пристрій для калібрування систем зважування і центрування літальних апаратів, що містить навантажувач та механізм силопередачі, який відрізняється тим, що як навантажувач використані зразкові вантажі, а як механізм силопередачі використана поздовжня балка з нанесеною на ній лінійкою і майданчиками з обмежувачами для додаткового навантаження зразковими вантажами, і поперечна балка, закріплена на поздовжній з можливістю переміщення та точної фіксації на ній, під майданчиками закріплені тензорезисторні датчики.
Текст
Реферат: UA 102790 U UA 102790 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до вимірювальної техніки і може бути використана при калібруванні систем зважування та центрування літальних апаратів в режимі визначення положення центра ваги. Такі системи можуть бути платформеного або стійкового типу і містять тензорезисторні датчики сили, сигнали з яких у вигляді напружень, пропорційних величині вимірюваної ваги окремої осі літака або вертольота, після посилення і перетворення в цифрову форму, надходять у ваговий термінал, де обробляються і відображаються. Для визначення центрування літального апарата інформація з термінала передається на персональний комп'ютер для розрахунку. Відомий пристрій для повірки силовимірювальних перетворювачів (Авторське свідоцтво № 1597635 СРСР, опубл.07.10.90), містить станину, зразковий силовимірювальний перетворювач, блок силозбуждення, керуючу ЕОМ, блок сполучення, цифро-аналоговий перетворювач (ЦАП), два аналого-цифрових перетворювачі (АЦП), керовані подільники напруг (УДН), блок управління, регулятор і вивірений силовимірювальний перетворювач. Керуюча ЕОМ через блок сполучення пов'язана з АЦП, ЦАП і УДН. Між виходом ЦАП та входом регулятора включений блок управління. Перемикання коефіцієнта передачі УДН дозволяє більш повно задовольняти вимогам до методики повірки за рахунок введення циклу перевантаження силового ланцюга без збільшення амплітудного діапазону АЦП і ЦАП. АЦП здійснює введення в ЕОМ інформації з вивіреного силовимірювального перетворювача, відповідної дійсним значенням реперних точок. Недолік даного пристрою полягає в тому, що при калібруванні систем зважування та центрування літальних апаратів можлива оцінка точності тензорезисторних датчиків сили і отже роботи системи тільки в режимі вимірювання поканальної ваги, а в режимі визначення положення центра ваги літального апарата точність оцінити неможливо. Найбільш близьким до пристрою є пристрій для калібрування динамометрів (патент на корисну модель № 18710 UA, опубл. 15.11.2006), який містить навантажувач, закритий теплоізоляційним кожухом, нагрівач, гвинтовий механізм попереднього навантаження, механізм силопередачі і джерело живлення. До виходу джерела живлення підключається прецизійний амперметр, який з'єднаний з блоком збору та обробки інформації, до якого підключений датчик температури навантажувача, розміщений під теплоізоляційним кожухом і датчик температури навколишнього середовища. Джерело живлення містить регулятор вихідної напруги. Навантажувач містить три паралельно розташованих циліндри з матеріалу з великим коефіцієнтом температурного розширення. Механізм передачі являє собою дві жорсткі пластини, закріплені між торцями навантажувача. Недоліком пристрою також є неможливість оцінки точності роботи систем зважування та центрування літальних апаратів в режимі визначення положення центра ваги. В основу корисної моделі поставлена задача реалізації можливості калібрування систем зважування та центрування літальних апаратів при вимірі положення центра ваги, наприклад, щодо середньої аеродинамічної хорди крила літака. Поставлена задача вирішується тим, що в пристрої для калібрування систем зважування та центрування літальних апаратів, який містить навантажувач та механізм силопередачі, згідно з корисною моделлю, як навантажувач використані зразкові вантажі, а як механізм силопередачі використана поздовжня балка з нанесеною на ній лінійкою і майданчиками з обмежувачами для додаткового навантаження зразковими вантажами, і поперечна балка, закріплена на поздовжній з можливістю переміщення та точної фіксації на ній, під майданчиками закріплені тензорезисторні датчики. Пристрій імітує літальний апарат по визначальних метрологічних параметрах. Навантажування пристрою зразковими вантажами дає можливість шляхом переміщення поперечної балки, що імітує крила літака, уздовж поздовжньої балки, що імітує фюзеляж літака, регулювати положення центру ваги. Кінці поперечної і поздовжньої балок (в точках прикладання додаткового навантаження) встановлюються на тензорезисторні датчики сили. Тензорезисторні датчики сили пристрої мають такі ж характеристики точності, як датчики системи зважування та центрування, яка калібрується, але менший у певну кількість разів у порівнянні з ними діапазон вимірювання. Таким чином, пристрій має три опори, як у більшості літаків, відповідні шасі носової частини, а також лівому і правому заднім шасі. При необхідності калібрування систем зважування та центрування літальних апаратів з великою кількістю опор, до конструкції даного пристрою може бути додана ще одна поперечна балка з такими ж конструктивними і точнісними параметрами, як у першій балці. Точність характеристик запропонованого пристрою визначається геометричними і ваговими параметрами і залежить від точності задання ваги і геометричних розмірів конструкції. Завдяки простоті пристрою і можливості точного визначення його параметрів, забезпечується висока точність калібрування систем зважування та центрування. 1 UA 102790 U 5 10 15 На кресленні зображена схема пристрою для калібрування систем зважування та центрування літальних апаратів. Пристрій містить поздовжню балку 1 з нанесеною на ній лінійкою 2 і поперечну балку 3. Поперечна балка 3 закріплена на поздовжній балці 1 з можливістю переміщення по ній. Поперечна балка 3 може бути точно встановлена на задану позначку шкали лінійки 2. На балках передбачені майданчики 4 з обмежувачами для установки зразкових вантажів 5, що створюють додаткове навантаження. Під цими майданчиками 4 для установки зразкових вантажів у точках навантаження закріплені тензорезисторні датчики 6. Пристрій працює наступним чином: У процесі калібрування системи зважування та центрування літальних апаратів її нормуючі перетворювачі відключаються від виходів датчиків ваговимірювальних платформ або стійок системи і з'єднуються з тензорезисторними датчиками 6 моделі. Випробування проводяться при декількох положеннях поперечної балки 3, контрольованих за шкалою лінійки 2, і декількох значеннях ваги, що задаються зразковими вантажами 5. Отримані за показаннями системи положення центра ваги порівнюються із зразковими значеннями, знайденими шляхом розрахунку. Розрахунок здійснюється за простим і точним математичним співвідношенням, відповідним конструктивній схемі моделі: Xцт Gпозд Xпрод Gпопер Xпопер G доб X доб Gпозд Gпопер G доб , де Xцв - координата центра ваги, Gпозд , Gпопер - величина ваги поздовжньої і поперечної балок відповідно, 20 Xпозд , Xпопер - відстань від початку координат до центра поздовжньої і поперечної балок відповідно, G дод - вага зразкових додаткових вантажів, X дод - відстань від початку координат до центра майданчика для установки зразкових 25 30 35 вантажів. Порівняння виміряних значень положення центра ваги із зразковими дозволяє оцінити статичні характеристики перетворення і точність досліджуваної системи. Обчислюється результуюча похибка з урахуванням похибки пристрою і похибки заміни реального об'єкта (літака або вертольота) пристроєм. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для калібрування систем зважування і центрування літальних апаратів, що містить навантажувач та механізм силопередачі, який відрізняється тим, що як навантажувач використані зразкові вантажі, а як механізм силопередачі використана поздовжня балка з нанесеною на ній лінійкою і майданчиками з обмежувачами для додаткового навантаження зразковими вантажами, і поперечна балка, закріплена на поздовжній з можливістю переміщення та точної фіксації на ній, під майданчиками закріплені тензорезисторні датчики. 2 UA 102790 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for calibration of aircraft weighting and centering systems
Автори англійськоюBorzenkova Hanna Viktorivna, Cherepashchuk Hryhorii Oleksandrovych
Назва патенту російськоюУстройство для калибровки систем взвешивания и центрирования летательных аппаратов
Автори російськоюБорзенкова Анна Викторовна, Черепащук Григорий Александрович
МПК / Мітки
МПК: G01L 25/00
Мітки: літальних, апаратів, калібрування, пристрій, центрування, зважування, систем
Код посилання
<a href="https://ua.patents.su/5-102790-pristrijj-dlya-kalibruvannya-sistem-zvazhuvannya-i-centruvannya-litalnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Пристрій для калібрування систем зважування і центрування літальних апаратів</a>
Спосіб фрактального аналізу зображень з високою об’єктовою насиченістю для синтезу еталонних зображень кореляційно-екстремальних систем навігації літальних апаратів
Номер патенту: 93034
Опубліковано: 10.09.2014
Автори: Таршин Володимир Анатолійович, Сидоренко Руслан Григорович, Пащенко Руслан Едуардович, Лупандін Володимир Анатолійович, Сотніков Олександр Михайлович
МПК: G01S 1/00
Мітки: синтезу, аналізу, об'єктовою, апаратів, літальних, систем, спосіб, еталонних, зображень, високою, кореляційно-екстремальних, насиченістю, фрактального, навігації
Формула / Реферат:
Спосіб фрактального аналізу зображень з високою об'єктовою насиченістю для синтезу еталонних зображень кореляційно-екстремальних систем навігації літальних апаратів, який полягає у локалізації інформативних областей зображень та виділенні ділянок зображень унікального топологічного складу з максимальною яскравістю шляхом побудови селективних зображень в заданому діапазоні фрактальної розмірності, який відрізняється тим, що додатково...
Пристрій для калібрування динамометрів
Номер патенту: 18710
Опубліковано: 15.11.2006
Автори: Черепащук Григорій Олександрович, Бикова Тетяна Володимирівна
МПК: G01L 25/00
Мітки: пристрій, калібрування, динамометрів
Формула / Реферат:
Пристрій для калібрування динамометрів, що містить навантажувач, закритий теплоізоляційним кожухом, нагрівач, гвинтовий механізм попереднього навантаження, механізм силопередачі, джерело живлення, який відрізняється тим, що до виходу джерела живлення підключено прецизійний амперметр, який з'єднаний з блоком збору і обробки інформації, до якого підключено давач температури навантажувача, розміщений на поверхні навантажувача під...
Тандем дискових літальних апаратів
Номер патенту: 40273
Опубліковано: 25.03.2009
Автор: Цюренко Валентин Андрійович
МПК: B64C 29/00, B64C 39/02
Мітки: тандем, апаратів, літальних, дискових
Формула / Реферат:
Тандем дискових літальних апаратів, який відрізняється тим, що містить парний набір дискових ідентичних літальних апаратів, які являють собою частини зрізаного циліндра або кулі, що жорстко зв'язані між собою кріпленням, при цьому кожний окремий апарат складається із зв'язаних в єдиний робочий комплекс кабіни для пілотів з приладами для навігації, відсіку для ємностей з паливом та речами, необхідними для життєдіяльності людей, відсіку для...
Канал автоматичного супроводження літальних апаратів за напрямком з використанням частот міжмодових биттів та можливістю пошуку, формування і обробки зображення літальних апаратів для комбінованої лазерної сист
Номер патенту: 101399
Опубліковано: 10.09.2015
Автори: Сачук Ігор Іванович, Носик Андрій Михайлович, Коломійцев Олексій Володимирович, Довбня Олександр Володимирович, Старцев Володимир Вікторович, Балабуха Олексій Сергійович, Орлов Сергій Володимирович, Опенько Павло Вікторович, Альошин Геннадій Васильович, Карлов Дмитро Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: апаратів, биттів, можливістю, міжмодових, використанням, лазерної, автоматичного, комбінованої, напрямком, обробки, сист, канал, частот, зображення, супроводження, літальних, формування, пошуку
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів (ЛА) за напрямком з використанням частот міжмодових биттів та можливістю пошуку, формування і обробки зображення ЛА для комбінованої лазерної системи, що містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів, модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий...
Спосіб побудови системи відновлення бортового обладнання літальних апаратів
Номер патенту: 18697
Опубліковано: 15.11.2006
Автори: Волошин Ігор Іванович, Марценківський Вадим Тадеушович, Соловйов Володимир Ілліч, Мостовий Віктор Володимирович, Волков Вадим Олександрович
МПК: G05B 13/00
Мітки: апаратів, побудови, системі, спосіб, відновлення, бортового, обладнання, літальних
Формула / Реферат:
Спосіб побудови системи відновлення бортового обладнання літальних апаратів, при якому отримують інформацію щодо технічного стану літальних апаратів за допомогою технічних засобів контролю, аналізують рівень надійності бортового обладнання за типами літальних апаратів, визначають кількісні та якісні показники системи відновлення бортового обладнання літальних апаратів, визначають структуру системи відновлення бортового обладнання літальних...
Попередній патент: Спосіб виробництва крему яблучного “ностальгія” з квасом медовим і цистозірою
Наступний патент: Спосіб профілактики вітамінно-мінеральної недостатності у молодняка великої рогатої худоби
Випадковий патент: Спосіб приготування нанесеного каталізатора