Спосіб багатопараметрового електромагнітного контролю
Номер патенту: 103169
Опубліковано: 10.12.2015
Автори: Бойко Григорій Олексійович, Шапран Євген Миколайович, Марченко Дмитро Миколайович, Бігвава Віталій Антонович, Смірний Михайло Федорович

Формула / Реферат
Спосіб багатопараметрового електромагнітного контролю, при якому застосовують робочий та компенсаційний датчики, увімкнені за диференціальною схемою, мінімізують модуль багатомірного сигналу диференціальної схеми з використанням електронного оптимізатора, заглушають вплив мультипликативної перешкоди за допомогою розмножувального пристрою, який відрізняється тим, що робочий та компенсаційний датчики виконують у вигляді двох паралельних стрижнів, на кінцях стрижнів робочого датчика розташовують пари обмоток управління, підключають їх до генератора лінійно зростаючого струму та генератора лінійно спадного струму, входи яких зв'язують з електронним оптимізатором.
Текст
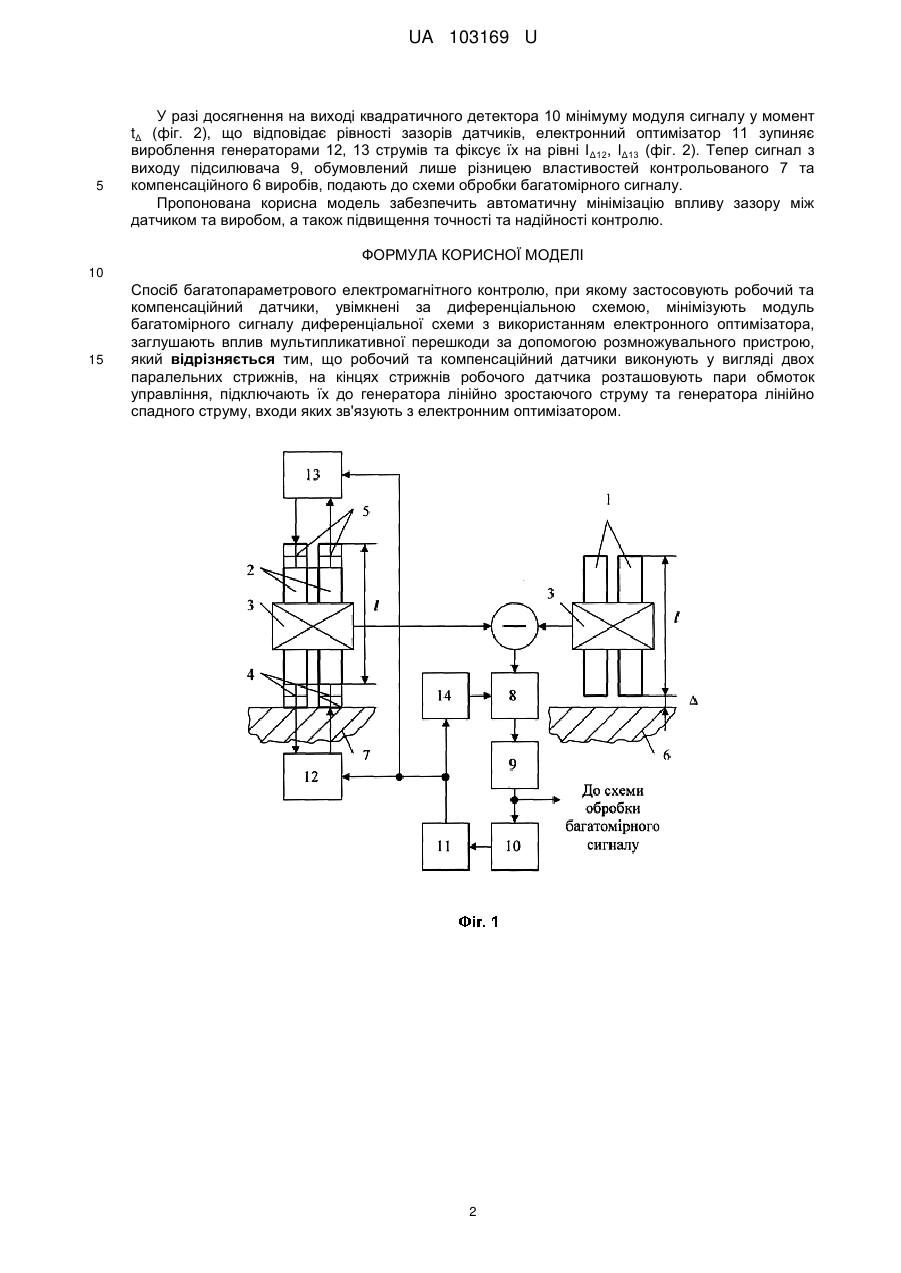
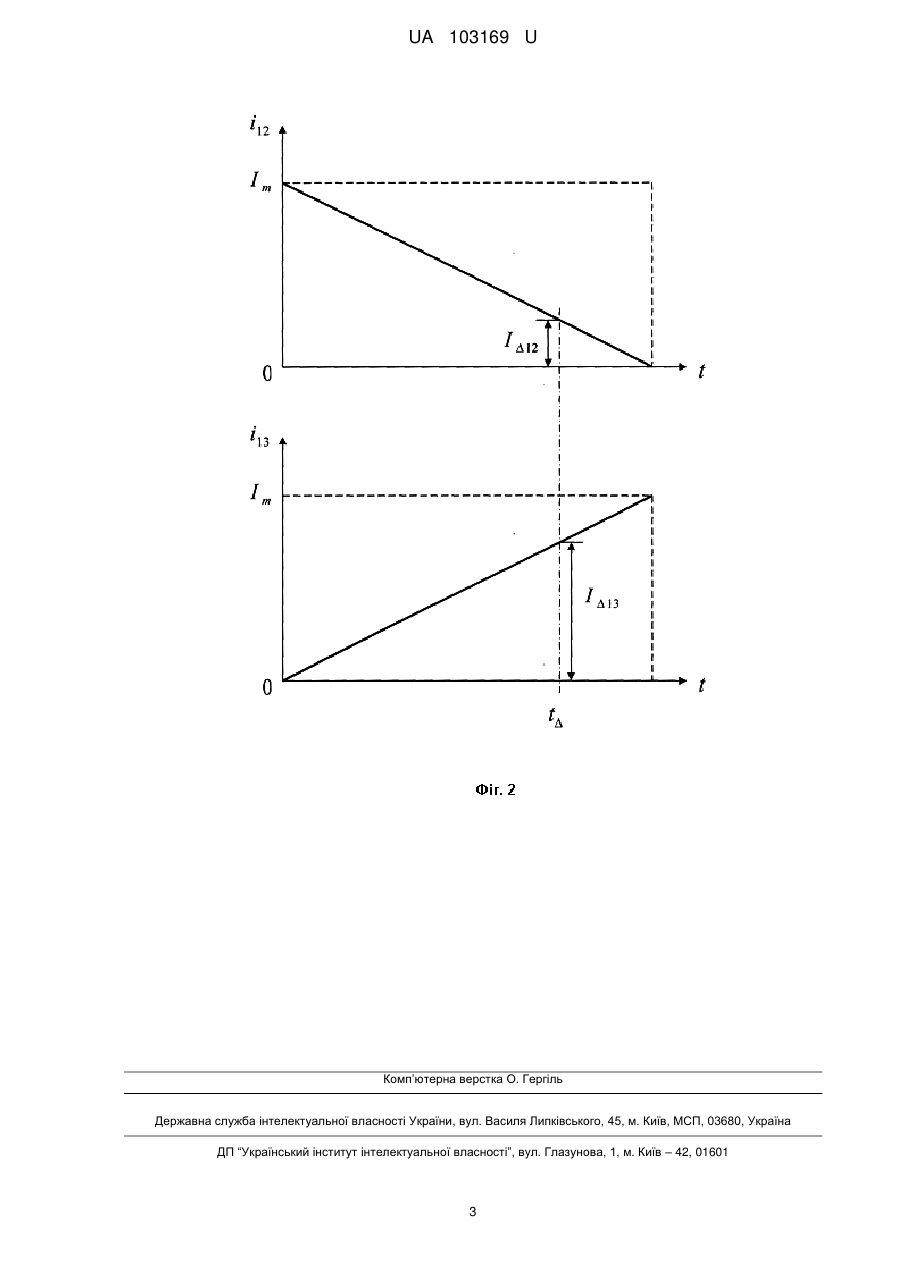
Реферат: Спосіб багатопараметрового електромагнітного контролю, при якому застосовують робочий та компенсаційний датчики, увімкнені за диференціальною схемою, мінімізують модуль багатомірного сигналу диференціальної схеми з використанням електронного оптимізатора, заглушають вплив мультипликативної перешкоди за допомогою розмножувального пристрою. Робочий та компенсаційний датчики виконують у вигляді двох паралельних стрижнів, на кінцях стрижнів робочого датчика розташовують пари обмоток управління, підключають їх до генератора лінійно зростаючого струму та генератора лінійно спадного струму, входи яких зв'язують з електронним оптимізатором. UA 103169 U (12) UA 103169 U UA 103169 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки і може бути використана для контролю властивостей феромагнітних виробів. Відомо спосіб багатопараметрового електромагнітного контролю, при якому застосовують робочий та компенсаційний датчики, увімкнені за диференціальною схемою, переміщують робочий датчик у напрямку, що співпадає з нормаллю до поверхні контрольованого виробу, та мінімізують модуль багатомірного сигналу диференціальної схеми з використанням електронного оптимізатора, при переміщенні датчика одночасно заглушають вплив мультипликативної перешкоди за допомогою розмножувального пристрою [див. а. с. СРСР 339856, G01N 27/86, опубл. 24.05.1972. бюл. №17]. Цей спосіб вибрано за прототип. Недоліком відомого способу багатопараметрового електромагнітного контролю є те, що використання системи прецизійного механічного переміщення датчика для мінімізація впливу зазору між датчиком та виробом призводить до зниження точності та надійності контролю. В основу корисної моделі поставлено задачу вдосконалення способу багатопараметрового електромагнітного контролю шляхом того, що робочий та компенсаційний датчики виконують у вигляді двох паралельних стрижнів, на кінцях стрижнів робочого датчика розташовують пари обмоток управління, підключають їх до генератора лінійно зростаючого струму та генератора лінійно спадного струму, входи яких зв'язують з електронним оптимізатором, що забезпечить автоматичну мінімізацію впливу зазору між датчиком та виробом і підвищення точності та надійності контролю феромагнітних виробів. Поставлена задача вирішується тим, що у способі багатопараметрового електромагнітного контролю, при якому застосовують робочий та компенсаційний датчики, увімкнені за диференціальною схемою, мінімізують модуль багатомірного сигналу диференціальної схеми з використанням електронного оптимізатора, заглушають вплив мультипликативної перешкоди за допомогою розмножувального пристрою, згідно з корисною моделлю, робочий та компенсаційний датчики виконують у вигляді двох паралельних стрижнів, на кінцях стрижнів робочого датчика розташовують пари обмоток управління, підключають їх до генератора лінійно зростаючого струму та генератора лінійно спадного струму, входи яких зв'язують з електронним оптимізатором. Суть корисної моделі пояснюється кресленням (фіг. 1), де зображено функціональну схему, що пояснює здійснення способу багатопараметрового електромагнітного контролю, що містить компенсаційний датчик зі стрижнями 1, робочий датчик зі стрижнями 2, увімкнені за диференціальною схемою, вимірювальні обмотки 3, обмотки управління 4, 5, розташовані на кінцях стрижнів 2 робочого датчика, компенсаційний виріб 6, контрольований виріб 7, розмножувальний пристрій 8, підсилювач 9, квадратичний детектор 10, електронний оптимізатор 11, функціональний перетворювач 12, генератор лінійно спадного струму 12, генератор лінійно зростаючого струму 13 та функціональний перетворювач 14. Вихід підсилювача 9 підключають до схеми обробки багатомірного сигналу. Спосіб багатопараметрового електромагнітного контролю здійснюється наступним чином. Компенсаційний датчик зі стрижнями 1 розташовують з певним зазором Δ над компенсаційним виробом 6, а робочий датчик зі стрижнями 2 - над поверхнею контрольованого виробу 7. Синусоїдні коливання генераторів частот підсумовуються у синтезаторі та подаються в обмотки збудження датчиків (не показано). Різницевий багатомірний сигнал подають на розмножувальний пристрій 8, підсилюють підсилювачем 9, на виході квадратичного детектора 10 отримують модуль багатомірного сигналу, який подають на електронний оптимізатор 11, що виділяє мінімуму модуля сигналу. Сигнал електронного оптимізатора 11 запускає генератор лінійно спадного струму 12 та генератор лінійно зростаючого струму 13, що підключені відповідно до пар обмоток управління 4 та 5, в яких обмотки увімкнені послідовно узгоджено. Генератор лінійно спадного струму 12 та генератор лінійно зростаючого струму 13 виробляють відповідно струми і12, і13 (фіг. 2), максимуми яких Im спроможні доводити ділянки стрижнів 2, які знаходяться під обмотками управління 4, 5, до насичення. При t=0 струм в обмотках управління 4 дорівнює Im, а струм в обмотках 5 відсутній, при цьому ділянка стрижнів 2 під обмотками управління 4 насичена, що еквівалентно зменшенню довжини стрижнів 2 до величини , що дорівнює довжині стрижнів 1, та появі зазору довжиною, що дорівнює довжині обмотки управління 4. При зміні струмів i12, i13 (фіг. 2) відповідно ним промагнічуються ділянки стрижнів 2, що призводить до зменшення еквівалентного зазору при незмінній еквівалентній довжині стрижнів 2. Одночасно сигнал з електронного оптимізатора 11 подається на вхід функціонального перетворювача 14, вихідний сигнал якого надходить на другий вхід розмножувального пристрою 8. Це необхідно для компенсації мультипликативної складової перешкоди, що спричиняється змінним зазором між робочим датчиком та контрольованим виробом 7. 1 UA 103169 U 5 У разі досягнення на виході квадратичного детектора 10 мінімуму модуля сигналу у момент tΔ (фіг. 2), що відповідає рівності зазорів датчиків, електронний оптимізатор 11 зупиняє вироблення генераторами 12, 13 струмів та фіксує їх на рівні ΙΔ12, ΙΔ13 (фіг. 2). Тепер сигнал з виходу підсилювача 9, обумовлений лише різницею властивостей контрольованого 7 та компенсаційного 6 виробів, подають до схеми обробки багатомірного сигналу. Пропонована корисна модель забезпечить автоматичну мінімізацію впливу зазору між датчиком та виробом, а також підвищення точності та надійності контролю. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб багатопараметрового електромагнітного контролю, при якому застосовують робочий та компенсаційний датчики, увімкнені за диференціальною схемою, мінімізують модуль багатомірного сигналу диференціальної схеми з використанням електронного оптимізатора, заглушають вплив мультипликативної перешкоди за допомогою розмножувального пристрою, який відрізняється тим, що робочий та компенсаційний датчики виконують у вигляді двох паралельних стрижнів, на кінцях стрижнів робочого датчика розташовують пари обмоток управління, підключають їх до генератора лінійно зростаючого струму та генератора лінійно спадного струму, входи яких зв'язують з електронним оптимізатором. 2 UA 103169 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMany parameters method of electromagnetic control
Автори англійськоюSmyrnyi Mykhailo Fedorovych, Marchenko Dmytro Mykolayovych, Shapran Yevhen Mykolayovych, Boiko Grygorii Oleksiyovuch, Bigva Vitalii Antonovych
Назва патенту російськоюСпособ многопараметрового электромагнитного контроля
Автори російськоюСмирный Михаил Федорович, Марченко Дмитрий Николаевич, Шапран Евгений Николаевич, Бойко Григорий Алексеевич, Бигвава Виталий Антонович
МПК / Мітки
МПК: G01N 27/00
Мітки: електромагнітного, контролю, багатопараметрового, спосіб
Код посилання
<a href="https://ua.patents.su/5-103169-sposib-bagatoparametrovogo-elektromagnitnogo-kontrolyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб багатопараметрового електромагнітного контролю</a>
Спосіб електромагнітного контролю феромагнітних виробів, що рухаються
Номер патенту: 54919
Опубліковано: 17.03.2003
Автори: Іванов Дмитро Олексійович, Куваєв Володимир Миколайович, Чигринський Володимир Олександрович, Карпинський Юрій Пантелеймонович
МПК: G01N 27/90
Мітки: контролю, виробів, електромагнітного, рухаються, феромагнітних, спосіб
Формула / Реферат:
Спосіб електромагнітного контролю феромагнітних виробів, що рухаються, який включає попереднє намагнічування контрольованого виробу, перетворення зміни індукції, викликане рухом виробу поза полем, що його намагнічує, в електричний сигнал, виділення з отриманого сигналу імпульсів, інтегрування їх і оцінку контрольованих параметрів за результатами інтегрування, який відрізняється тим, що намагнічування виробу здійснюють в імпульсному...
Спосіб автоматизації контролю та визначення механічних параметрів електромагнітного реле
Номер патенту: 11886
Опубліковано: 16.01.2006
Автори: Разгонов Адам Пантелійович, Бондаренко Борис Маврович, Безрукавий Дмитро Анатолійович, Андреєвських Олександр Вікторович
МПК: G01B 7/00, H01H 51/00, G01M 19/00
Мітки: електромагнітного, контролю, визначення, механічних, параметрів, автоматизації, реле, спосіб
Формула / Реферат:
Спосіб автоматизації контролю та визначення механічних параметрів електромагнітного реле, при якому одночасно паралельно реєструють роботу реле по одному та більше каналах вимірювання, який відрізняється тим, що використовують цифрові відео- та акустичні канали, по яких сигнали, які містять інформацію про механічні параметри, з датчиків подають на багатовхідний порт комп'ютера, за допомогою спеціальної програми реєструють, порівнюють їх з...
Спосіб автоматизації контролю механічних параметрів електромагнітного реле
Номер патенту: 35716
Опубліковано: 10.10.2008
Автори: Безрукавий Дмитро Анатолійович, Андреєвських Олександр Вікторович, Бондаренко Борис Маврович, Розгонов Адам Пантелійович
МПК: G01R 27/20
Мітки: автоматизації, параметрів, контролю, електромагнітного, спосіб, реле, механічних
Формула / Реферат:
Спосіб автоматизації контролю механічних параметрів електромагнітного реле, при якому одночасно паралельно реєструють роботу реле по одному та більше каналах вимірювання, використовуючи цифрові відео- та акустичні канали, по яких сигнали, які містять інформацію про механічні параметри, з датчиків подають на багатовхідний порт комп'ютера, за допомогою спеціальної програми реєструють, порівнюють їх з еталонними сигналами, які зберігаються в...
Пристрій для електромагнітного контролю стану каналів ливарної мгд установки
Номер патенту: 89415
Опубліковано: 25.04.2014
Автори: Богдан Кім Степанович, Дубодєлов Віктор Іванович, Моісеєв Юрій Васильович, Слажнєв Микола Андрійович
МПК: G01N 27/80, G01R 33/02, G01N 27/84, G01R 19/00
Мітки: мгд, контролю, пристрій, стану, ливарної, електромагнітного, установки, каналів
Формула / Реферат:
Пристрій для електромагнітного контролю стану каналів ливарної МГД установки, до складу якого входять: первинний датчик індукції магнітного поля, підсилювач, аналого-цифровий перетворювач, індикатор сигналу та блок живлення, який відрізняється тим, що в нього додатково введено два аналого-цифрових перетворювачі, триканальний мікропроцесорний блок вимірювання і програмного оброблення первинної інформації та спеціалізований монітор, причому...
Спосіб комплексного електромагнітного контролю структурного і напружено-деформованого стану феромагнітних матеріалів
Номер патенту: 100379
Опубліковано: 27.07.2015
Автори: Мінаков Антон Сергійович, Осташ Орест Петрович, Безлюдько Генадій Якович, Мінаков Сергій Миколайович, Учанін Валентин Миколайович
МПК: G01N 27/72, G01L 1/12
Мітки: структурного, матеріалів, контролю, феромагнітних, стану, електромагнітного, спосіб, напружено-деформованого, комплексного
Формула / Реферат:
1. Спосіб комплексного електромагнітного контролю структурного і напружено-деформованого стану феромагнітних матеріалів, що полягає у перемагнічуванні контрольованого матеріалу, визначенні структурно-чутливого магнітного параметра, за яким визначають стан контрольованого матеріалу, який відрізняється тим, що додатково визначають параметри анізотропії магнітних властивостей контрольованого матеріалу, які використовують для визначення...
Попередній патент: Пристрій для визначення механічних напружень у феромагнітних конструкціях
Наступний патент: Цифровий автоматичний коерцитиметр
Випадковий патент: Привід гідравлічного преса