Пристрій для електромагнітного контролю стану каналів ливарної мгд установки
Номер патенту: 89415
Опубліковано: 25.04.2014
Автори: Дубодєлов Віктор Іванович, Богдан Кім Степанович, Слажнєв Микола Андрійович, Моісеєв Юрій Васильович
Формула / Реферат
Пристрій для електромагнітного контролю стану каналів ливарної МГД установки, до складу якого входять: первинний датчик індукції магнітного поля, підсилювач, аналого-цифровий перетворювач, індикатор сигналу та блок живлення, який відрізняється тим, що в нього додатково введено два аналого-цифрових перетворювачі, триканальний мікропроцесорний блок вимірювання і програмного оброблення первинної інформації та спеціалізований монітор, причому датчик індукції виконано портативним і трикоординатним (3D), а його виходи по кожній з координат (X, Y, Z) підключені за допомогою гнучкого кабелю через підсилювач і аналого-цифровий перетворювач до мікропроцесорного блока, з'єднаного з монітором, які забезпечують візуалізацію змін стану каналу і їх місцеположення в процесі експлуатації МГД установки.
Текст
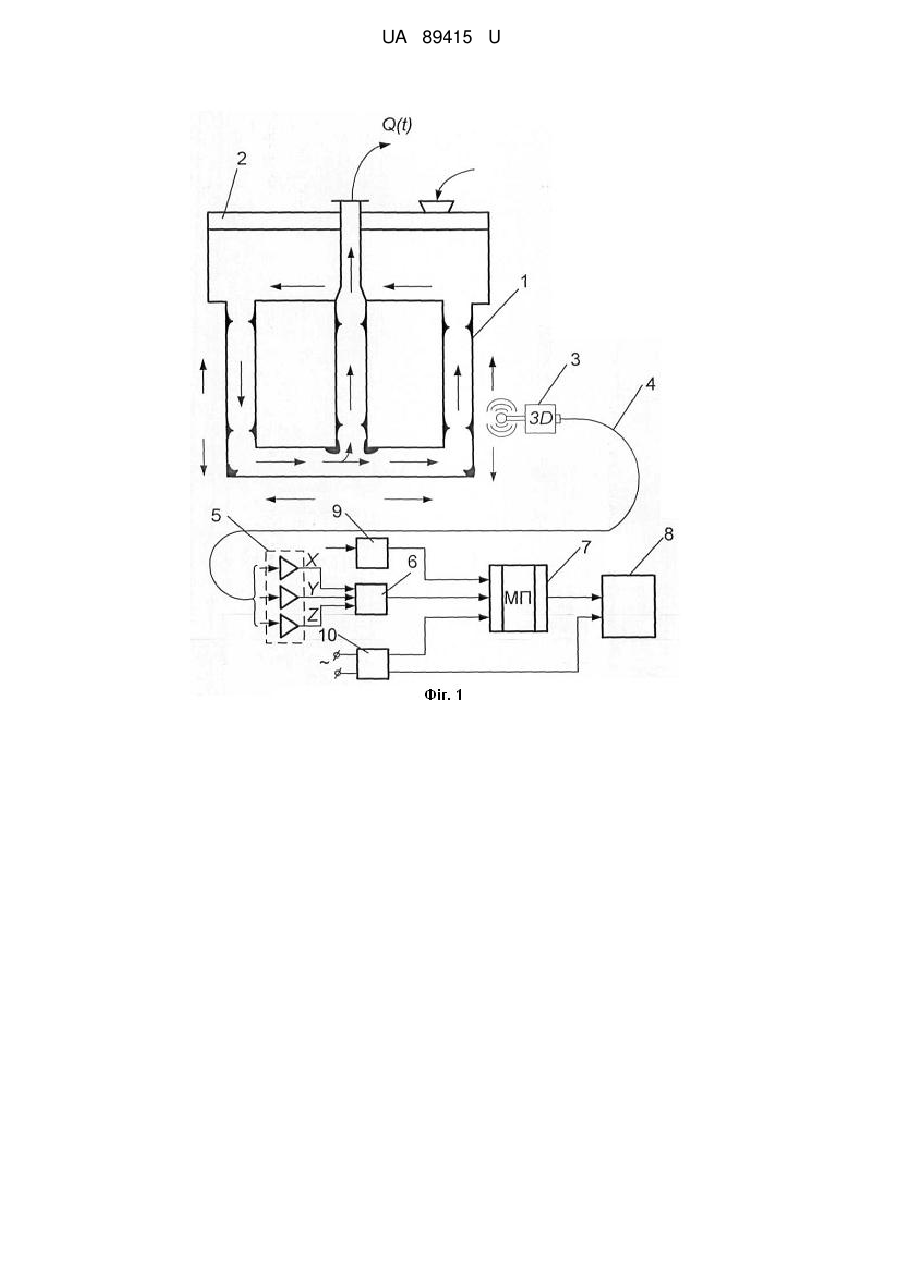
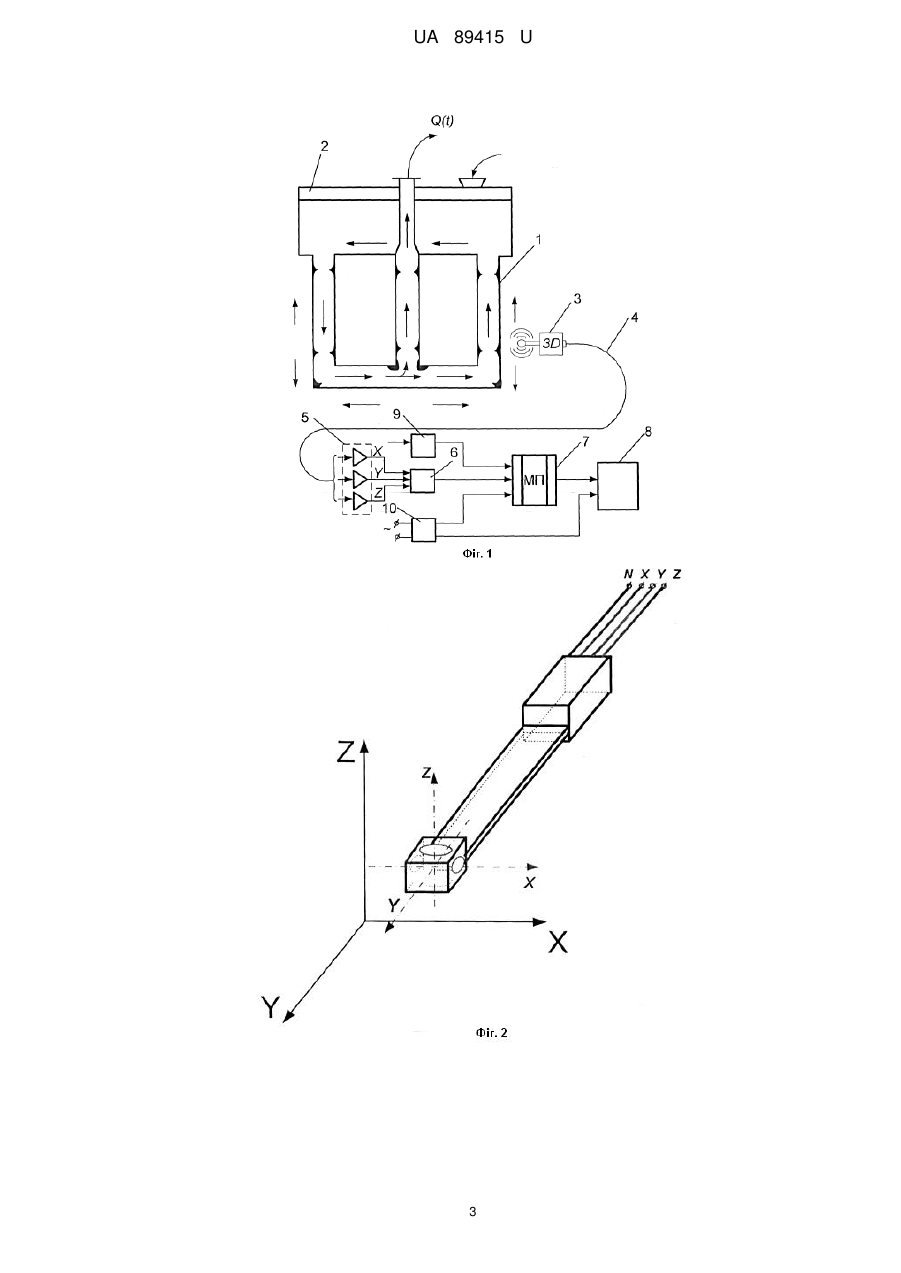
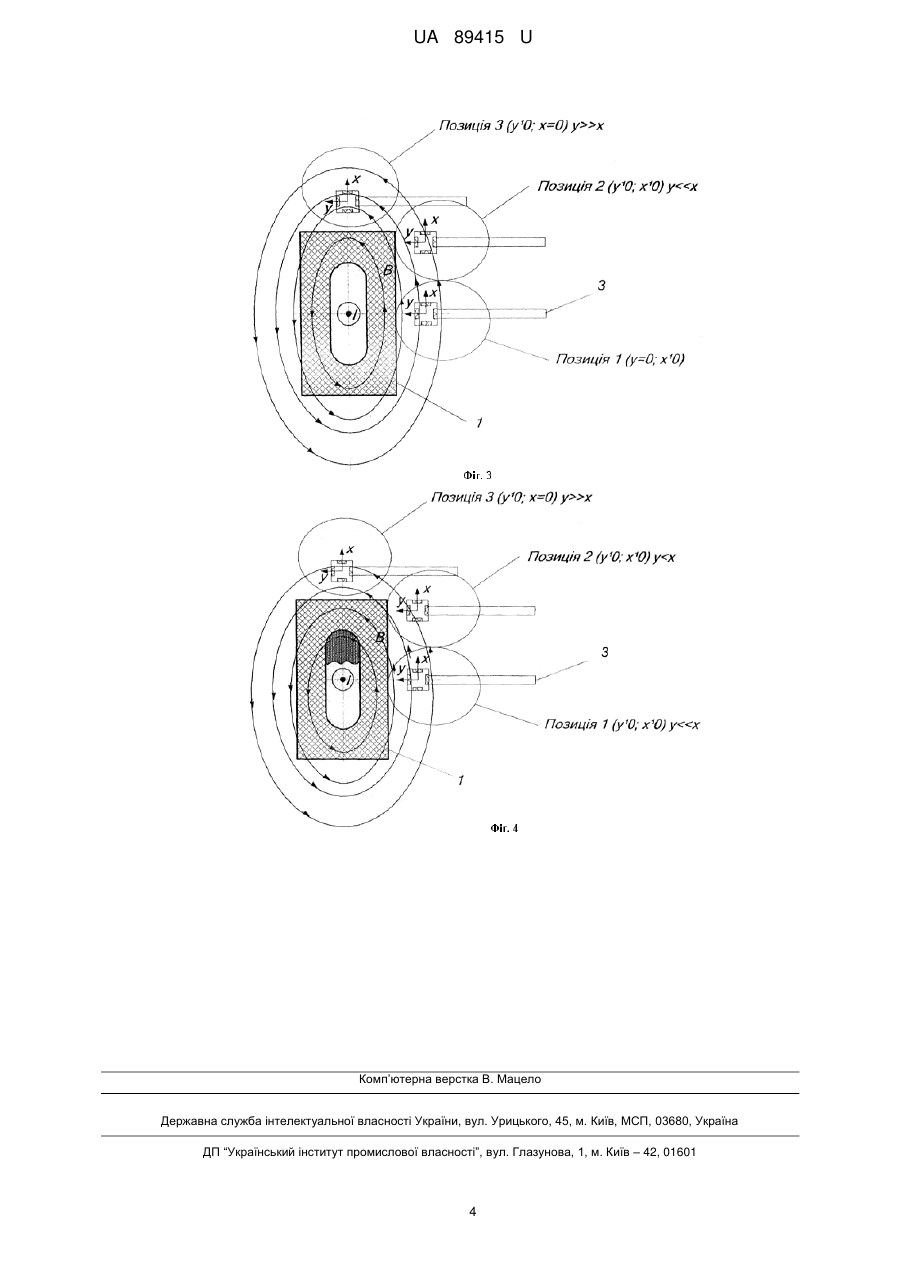
Реферат: Пристрій для електромагнітного контролю стану каналів ливарної МГД установки містить первинний датчик індукції магнітного поля, підсилювач, аналого-цифровий перетворювач, індикатор сигналу та блок живлення. Додатково в нього введено два аналого-цифрових перетворювачі, триканальний мікропроцесорний блок вимірювання і програмного оброблення первинної інформації та спеціалізований монітор. При цьому датчик індукції виконано портативним і трикоординатним (3D), а його виходи по кожній з координат (X, Y, Z) підключені за допомогою гнучкого кабелю через підсилювач і аналого-цифровий перетворювач до мікропроцесорного блока, з'єднаного з монітором. UA 89415 U (12) UA 89415 U UA 89415 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до контрольно-вимірювальної техніки і може бути використана в металургії та ливарному виробництві для безконтактного контролю стану каналів індукційних канальних печей, ливарних МГД установок та інших агрегатів, які мають індукційні канальні одиниці. Відомо пристрій для пошуку і безконтактного обстеження трубопроводів, який складається з двох, розміщених на штанзі, датчиків, виконаних у вигляді двохкомпонентних систем взаємно ортогональних з сумісними центрами індукційних рамок, виходи яких через перемикач послідовно під'єднані до аттенюатора, вибіркового підсилювача, амплітудного детектора і вимірювального приладу (А.с. СССР 1506367, G01N27/82, опубл. в Б.И. № 33, 1989 г.). Недоліком цього пристрою є низька точність, обумовлена відсутністю калібровки, а також складність застосування для електромагнітного контролю стану каналів індукційних одиниць. Відомо також пристрій для обміру дефектів в ізоляційних покриттях (Патент Великобритании 2119094, G01U3/11, G01N27/82), що складається з однієї або двох пар ідентичних індукційних перетворювачів, розташованих паралельно і рознесених у просторі в площині, перпендикулярній до осі трубопроводу, і пристрою прийому, порівняння і обробки сигналів, що складається з чотирьох попередніх підсилювачів, чотирьох вибіркових підсилювачів, двох мультиплексорів, керованого підсилювача, випрямляча, чотирьох запам'ятовуючих конденсаторів, демультиплексора, аналого-цифрового перетворювача і мікрокомп'ютера. Недоліком цього пристрою є складність конструкції і низька точність, яка обумовлена нестабільністю частоти струму у трубопроводі. Найбільш близьким (найближчим аналогом) до запропонованої корисної моделі щодо технічної суті і досягнутого результату є пристрій для випромінювання періодичних магнітних полів і отримання їх розподілу у просторі та часі (Патент RU 2174235 С1, G01R33/02, опубл. 27.09.2001), до складу якого входить шина, крокові двигуни, які підключені до блоків управління, під'єднаний до першого двигуна передавальний гвинт, джерело вимірювання магнітних полів. Крім того, до складу пристрою входить додаткова шина і два вимірювальних контури у вигляді ортогонально орієнтованих один відносно одного вузьких прямокутних рамок, жорстко з'єднаних з механізмом двокоординатного позиціювання. Електричні виходи контурів підключені до підсилювачів, виходи котрих з'єднані з входами двоканального аналого-цифрового перетворювача, підключеного до інтерфейсу, виходи котрого з'єднані з відповідними входами комп'ютера. Технічний результат застосування цього пристрою полягає у вимірюванні магнітної індукції в одній точці і отриманні розподілу магнітних полів у просторі і часі, а також візуалізації їх зображень з використанням алгоритму обчислюваної томографії. Недоліком цього пристрою є складність його конструкції і застосування для контролю стану індукційних каналів МГД установок. В основу запропонованої корисної моделі поставлена задача забезпечення візуалізації змін стану каналу при його заростанні і їх місцеположення в процесі експлуатації МГД установки, що дозволить своєчасно здійснювати очищення каналів. Поставлена задача вирішується тим, що в запропонований пристрій для електромагнітного контролю стану каналів ливарної МГД установки, до складу якого входять: первинний датчик індукції магнітного поля, підсилювач, аналого-цифровий перетворювач, індикатор сигналу та блок живлення, згідно з корисною моделлю, додатково введено два аналого-цифрових перетворювачі, триканальний мікропроцесорний блок вимірювання і програмного оброблення первинної інформації та спеціалізований монітор, причому датчик індукції виконано портативним і трикоординатним (3D), а його виходи по кожній з координат (X, Y, Z) підключені за допомогою гнучкого кабелю через підсилювач і аналого-цифровий перетворювач до мікропроцесорного блока, з'єднаного з монітором, які забезпечують візуалізацію змін стану каналу і їх місцеположення в процесі експлуатації МГД установки. Запропонований пристрій для електромагнітного контролю стану каналів ливарної МГД установки дозволяє підвищити точність визначення місцеположення змін стану каналу при його заростанні в процесі експлуатації і своєчасно здійснювати очищення каналів. Для пояснення запропонованої корисної моделі на фіг. 1 наведено структурнофункціональну схему пристрою для електромагнітного контролю стану каналів 1 ливарної МГД установки. Канали 1 з'єднані з тигелем 2 (індуктори і електромагніт МГД установки на схемі не показані). Трикоординатний датчик 3 індукції магнітного поля з'єднаний з допомогою гнучкого кабелю 4 з блоком 5 підсилювачів, підключених до триканального аналого-цифрового перетворювача 6, вихід якого з'єднаний з мікропроцесорним блоком 7 вимірювання та програмного оброблення первинної інформації. Вихід мікропроцесорного блока 7 підключений до спеціалізованого монітора 8. У структурі пристрою передбачено електронний ключ 9 для вибору режиму роботи. Живлення елементів схеми здійснюється від блока 10 живлення, 1 UA 89415 U 5 10 15 20 25 30 35 40 підключеного до мережі змінного струму напругою 220 В. Загальний вигляд 3D датчика індукції магнітного поля наведено на фіг. 2. 3D датчик складається з шести перетворювачів Холла, змонтованих у вигляді куба з ребром 6 мм. Сигнали від паралельно розташованих пар перетворювачів сумуються, що у випадку неоднорідного магнітного поля, приводить до усереднення величини індукції усередині кожної пари перетворювачів. У загальному випадку вихідні сигнали UX, UY, UZ характеризують одну просторову точку вимірювання, яка знаходиться у геометричному центрі куба. 3D датчик дозволяє реалізувати неперервне вимірювання нормальної (Z) і двох тангенціальних (X, Y) складових індукції магнітного поля на відстані 50 мм і більше від зовнішньої поверхні каналу. Принцип роботи пристрою для електромагнітного контролю стану каналів з рідкометалевим провідником, по якому протікає змінний електричний струм високої щільності, заснований на просторовому (3D) вимірюванні розподілу інтенсивності полів розсіювання навколо каналів МГД установки за допомогою 3D датчика індукції. При протіканні змінного електричного струму І 3 високої щільності (від 10 А) через рідкометалевий провідник в індукційному каналі навколо нього індукується змінне магнітне поле з індукцією В (фіг. 3), причому конфігурація розподілу інтенсивності величини В повторює контури перерізу рідкометалевого провідника, що міститься у каналі. При розташуванні 3D датчика індукції перпендикулярно до осі симетрії каналу магнітні силові лінії замикаються навколо нього та пронизують чутливі елементи 3D датчика у горизонтальній площині. При цьому, у випадку, коли канал чистий, тобто переріз каналу і його конфігурація у вертикальній площині незмінні (фіг. 3), пара перетворювачів для вимірювання вертикальної складової індукції В по координаті Z не буде її фіксувати (U Z=0). У випадку, коли за якихось причин геометрія каналу у вертикальній площині відносно 3D датчика індукції має відхилення, наприклад, при локальному заростанні частини (дільниці) каналу неелектропровідними продуктами (фіг. 4), напрямок протікання струму по вертикалі буде набувати деякий кут, який приводить до утворення вертикальної складової індукції, яку сприймає пара перетворювачів 3D датчика, розташованих паралельно вертикальній осі каналу. Це дозволяє відслідковувати місця локальних змін напрямку протікання струму в результаті зміни геометрії каналу при його заростанні. Отримана інформація, після її програмного оброблення у блоці 7 (фіг. 1) надходить у спеціалізований монітор 8, на дисплеї якого висвітлюється гістограма, що характеризує стан каналу у місці знаходження 3D датчика. При переміщенні портативного 3D датчика вздовж поверхні каналів МГД установки можна одержати візуальну картину стану каналів в процесі експлуатації, що дозволить визначити величину і напрямок векторів магнітної індукції, які характеризують зміни стану каналів індукційної одиниці установки. Таким чином, запропонований пристрій, на відміну від аналогів, дає змогу одержати новий технічний результат, виражений у безконтактному 3D вимірюванні магнітної індукції полів розсіювання навколо каналів МГД установки, а отриману інформацію використовувати для визначення місцеположення змін стану каналів, що дозволяє своєчасно їх усувати і повертати установку у штатний режим роботи. В результаті створюються передумови для підвищення коефіцієнта корисної дії установки та економії енергоносіїв. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Пристрій для електромагнітного контролю стану каналів ливарної МГД установки, до складу якого входять: первинний датчик індукції магнітного поля, підсилювач, аналого-цифровий перетворювач, індикатор сигналу та блок живлення, який відрізняється тим, що в нього додатково введено два аналого-цифрових перетворювачі, триканальний мікропроцесорний блок вимірювання і програмного оброблення первинної інформації та спеціалізований монітор, причому датчик індукції виконано портативним і трикоординатним (3D), а його виходи по кожній з координат (X, Y, Z) підключені за допомогою гнучкого кабелю через підсилювач і аналогоцифровий перетворювач до мікропроцесорного блока, з'єднаного з монітором, які забезпечують візуалізацію змін стану каналу і їх місцеположення в процесі експлуатації МГД установки. 2 UA 89415 U 3 UA 89415 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюMoiseiev Yurii Vasyliovych, Dubodelov Viktor Ivanovych, Slazhniev Mykola Andriiovych, Bohdan Kim Stepanovych
Автори російськоюМоисеев Юрий Васильевич, Дубоделов Виктор Иванович, Слажнев Николай Андреевич, Богдан Ким Степанович
МПК / Мітки
МПК: G01N 27/80, G01N 27/84, G01R 33/02, G01R 19/00
Мітки: стану, ливарної, пристрій, мгд, контролю, каналів, установки, електромагнітного
Код посилання
<a href="https://ua.patents.su/6-89415-pristrijj-dlya-elektromagnitnogo-kontrolyu-stanu-kanaliv-livarno-mgd-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Пристрій для електромагнітного контролю стану каналів ливарної мгд установки</a>
Спосіб контролю корозійного стану залізобетонних облицювань меліоративних каналів
Номер патенту: 44575
Опубліковано: 12.10.2009
Автори: Литвиненко Петро Євгенович, Вітковський Юрій Антонович, Коваленко Олександр Васильович
МПК: G01N 33/38
Мітки: контролю, облицювань, залізобетонних, корозійного, каналів, меліоративних, спосіб, стану
Формула / Реферат:
Спосіб контролю корозійного стану залізобетонних облицювань меліоративних каналів, що включає розміщення електродів вимірювання на плитах облицювань в місцях їх можливої корозії і визначення корозійного стану залізобетонних конструкцій, який відрізняється тим, що на поверхні конструкцій вимірюють потенціал електричного поля корозії, причому нейтральність вимірюваного рівня електричного поля забезпечують наявністю в електричній схемі...
Спосіб контролю корозійного стану бетону залізобетонних облицювань меліоративних каналів
Номер патенту: 59916
Опубліковано: 10.06.2011
Автор: Вітковський Юрій Антонович
МПК: G01B 7/00
Мітки: корозійного, спосіб, контролю, бетону, каналів, стану, залізобетонних, меліоративних, облицювань
Формула / Реферат:
Спосіб контролю корозійного стану бетону залізобетонних облицювань меліоративних каналів, що включає розміщення електродів вимірювання на плитах облицювань в місцях їх можливої корозії і вимірювання потенціалу електричного поля корозії, який відрізняється тим, що з метою визначення ступеня корозійного ушкодження бетону залізобетонних облицювань меліоративних каналів додатково вимірюють потенціал електричного поля корозії на поверхні...
Пристрій захисту і контролю руху копальневої підйомної установки
Номер патенту: 32732
Опубліковано: 26.05.2008
Автори: Роменський Володимир Костянтинович, Попов Микола Миколайович, Соломатін Леонід Олександрович, Єфремов Дмитро Владиславович, Мельник Юрій Станіславович, Кононенко Олексій Михайлович
МПК: B66B 5/12
Мітки: руху, захисту, контролю, копальневої, пристрій, установки, підйомної
Формула / Реферат:
1. Пристрій захисту і контролю руху копальневої підйомної установки, що містить мікропроцесорний блок із засобом візуального виведення інформації і сполучені з ним лініями зв’язку датчик контролю положення підйомної посудини в стовбурі, що встановлений на приводному валу підйомного барабана, кінематично зв’язаного з валом електродвигуна, і датчик контролю положення підйомної посудини в стовбурі, що встановлений на валу відхиляючого або...
Пристрій контролю стану екологічної комфортабельності
Номер патенту: 30670
Опубліковано: 11.03.2008
Автори: Величук Денис Дмитрович, Ащеулов Анатолій Анатолійович
МПК: H01L 35/00, A61B 5/00
Мітки: контролю, стану, пристрій, комфортабельності, екологічної
Формула / Реферат:
1. Пристрій контролю стану екологічної комфортабельності людини у вигляді наручного годинника на основі комп'ютерного блока обробки інформації з рідкокристалічним дисплеєм, таймера, блока електричного живлення, датчиків температури та зчитування сердечного пульсу людини, який відрізняється тим, що містить датчики температури та тиску оточуючого середовища, сонячної радіації та блок звукової і світлової сигналізації.2. Пристрій за п. 1,...
Пристрій ітеративної оцінки стану каналів зв`язку систем з технологією мімо
Номер патенту: 62638
Опубліковано: 12.09.2011
Автори: Кувшинов Олексій Вікторович, Восколович Олексій Іванович, Зайцев Сергій Васильович
МПК: H03M 13/37
Мітки: пристрій, мімо, технологією, ітеративної, зв'язку, стану, каналів, оцінки, систем
Формула / Реферат:
Пристрій ітеративної оцінки стану каналів зв'язку систем з технологією МІМО (6), що містить блок, що виробляє додаткові біти по завершенню кодування блока даних (14), який з’єднаний з декодерами 1,2 (1, 2), який відрізняється тим, що додатково містить наступні блоки: регістри зсуву (7, 8, 10, 12), блок, що здійснює операцію віднімання (9), блок, що здійснює операцію введення в ступінь 2 (11), блок, що здійснює операцію сумування та ділення...
Попередній патент: Термопластична фарба для нанесення горизонтальної дорожньої розмітки
Наступний патент: Пристрій для усунення прихватів при бурінні
Випадковий патент: Спосіб одержання сухого спіненого сиру