Система для визначення розташування частинок в рідинному середовищі
Формула / Реферат
1. Система для визначення розташування частинок в рідинному середовищі, що містить джерело когерентного випромінювання - імпульсний лазер, модулятор добротності, систему дзеркал, короткофокусний об'єктив, точковий просторовий фільтр, довгофокусний об'єктив, голограму, об'єкт для дослідження, генератор звукових коливань та фотокамеру, яка відрізняється тим, що додатково введений блок рівнеміру рідинного ультразвукового з можливістю визначення точного місця розташування об'єкта, який досліджується.
2. Система за п. 1, яка відрізняється тим, що блок рівнеміру рідинного ультразвукового встановлений з можливістю пересування в чверті, обмеженій 90°.
Текст
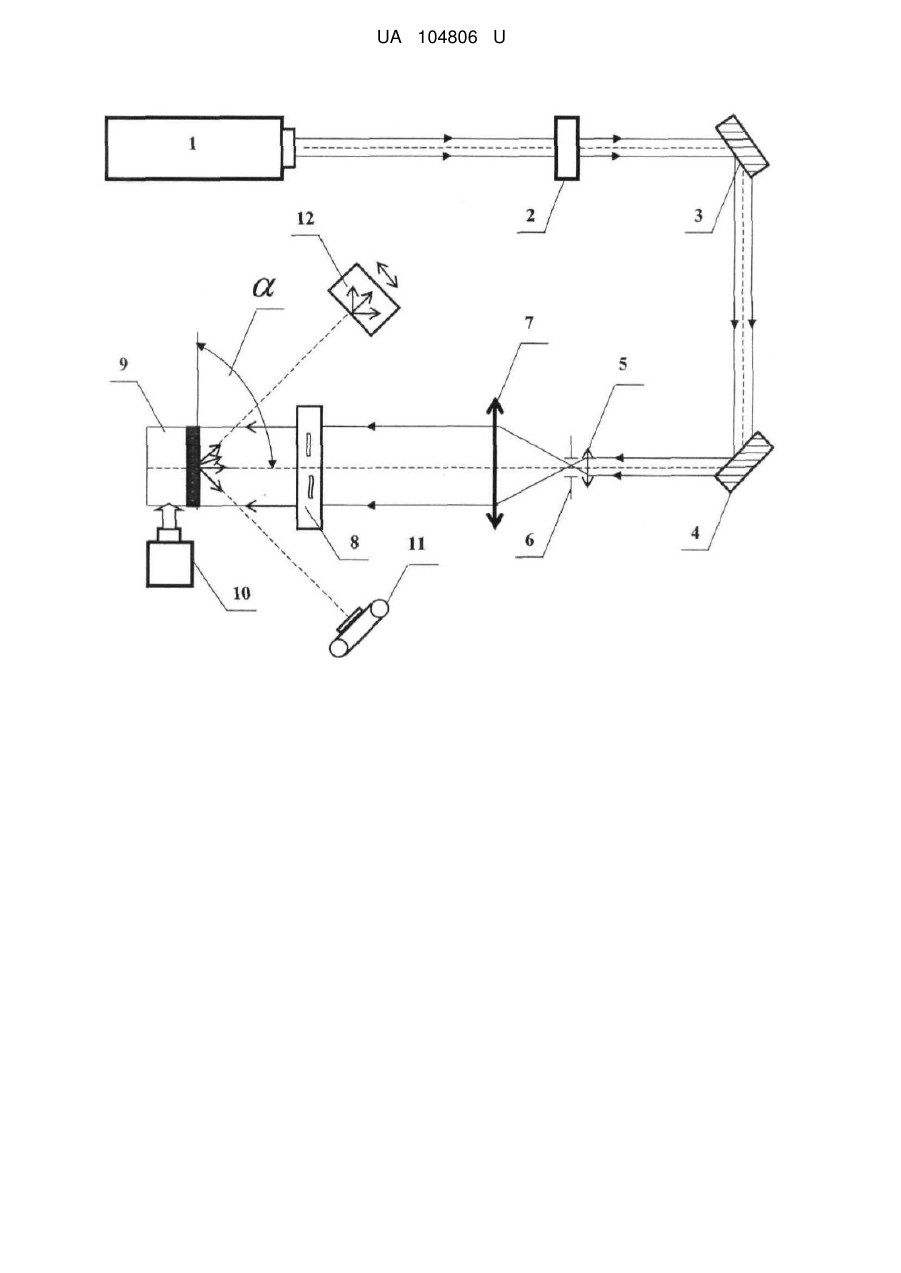
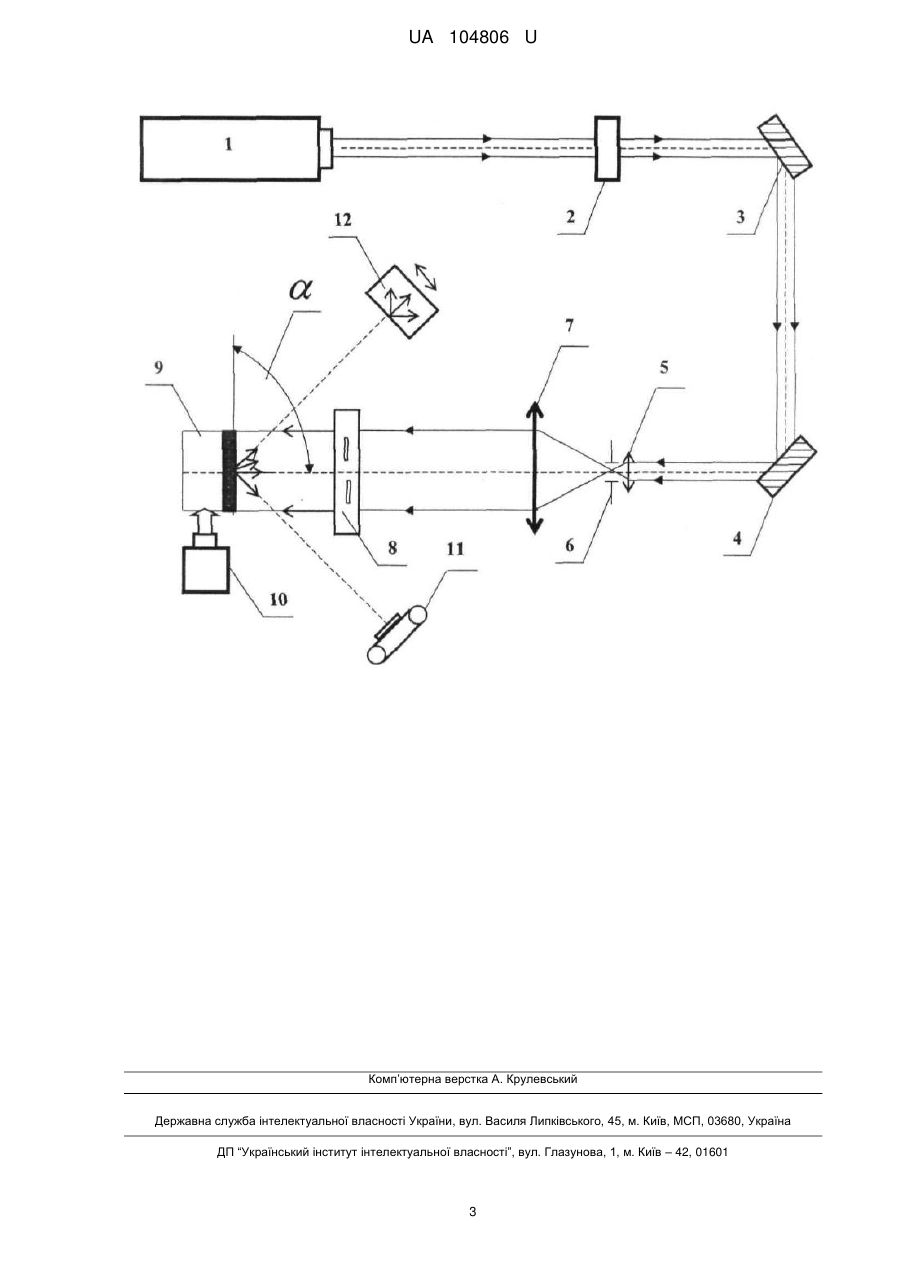
Реферат: UA 104806 U UA 104806 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі контрольно-вимірювальної техніки й призначена для визначення координати або місця розташування частинок механічних домішок в різних рідинних середовищах. Відомий спосіб вимірювання амплітуди коливань методом голографічної інтерферометрії осереднення по часу [Джоунс Р., Уайкс К. Голографическая и спекл-интерферометрия. - Μ.: Мир, 1986. - С. 110-112]. Суть найближчого аналога полягає у тому, що поверхню об'єкта, який здійснює механічні коливання, освітлюють неперервним когерентним випромінюванням лазера та реєструють голографічну інтерферограму об'єкта, за допомогою якої визначають розподіл амплітуди коливань по поверхні об'єкта. Виконують спосіб на установці, що містить джерело когерентного випромінювання, об'єкт дослідження та реєстратор амплітуди коливань. Недоліком цього способу є невисока точність вимірювання та неможливість дослідження динамічних об'єктів, які, наприклад, обертаються, у реальному часі, а також відсутність можливості визначення місця розташування (координати) об'єкта дослідження. Як найближчий аналог вибрано спосіб вимірювання амплітуди коливань дифузно 7 відбиваючого об'єкта [Пат. № 94162 Україна, МПК G01N 15/00. Спосіб вимірювання амплітуди коливань дифузно відбиваючого об'єкта / С.І. Мовчан, М.В. Морозов. - № 200911607; заявл. 13.11.2009, опубл. 27.09.2010, Бюл. № 7]. Реалізація способу відбувається на системі, що містить джерело когерентного випромінювання - імпульсний лазер, модулятор добротності, систему дзеркал, короткофокусний об'єктив, точковий просторовий фільтр, довгофокусний об'єктив, голограму, об'єкт для дослідження, генератор звукових коливань та фотокамеру, які формують пучок випромінювання, що освітлює об'єкт дослідження, при цьому реєструється голограма нерухомої поверхні об'єкта у зустрічних пучках, за рахунок збудження коливань об'єкта, що досліджується, і з використанням генератора звукових коливань відтворюється їх величина та напрям дії, з встановленням режиму модулятора добротності, випромінювання імпульсного лазера, та відбувається реєстрація голографічної інтерферографії збудженого амплітудного стану об'єктива за допомогою фотокамери. Недоліком найближчого аналогу є недостатність умов в системі для проведення технологічних вимірювань з виключними характеристиками параметрів частинок водних розчинів. В основу корисної моделі поставлена задача розробити систему для визначення розташування частинок в рідинному середовищі шляхом встановлення додаткового блока рівнеміра рідинного ультразвукового, який забезпечує ефективне дослідження рідинного середовища чи будь-якого іншого розчину та при якому створюються умови для визначення розташування частинок водного розчину та їх окремих гідромеханічних параметрів. Поставлена задача вирішується тим, що в системі для визначення розташування частинок в рідинному середовищі, яка включає джерело когерентного випромінювання - імпульсний лазер, модулятор добротності, систему дзеркал, короткофокусний об'єктив, точковий просторовий фільтр, довгофокусний об'єктив, голограму, об'єкт для дослідження, генератор звукових коливань та фотокамеру, згідно з корисною моделлю, встановлено додатково блок рівнемір рідинний ультразвуковий, з можливістю визначення місця розташування (рівня від дна та бокових стінок, висоти та інш.) об'єкта дослідження, який розташований в електрофоретичній камері. В прикладі конкретного виконання блок рівнемір рідинний ультразвуковий встановлений з можливістю пересування в чверті, обмеженій 90°, яка дозволяє визначати розташування частинки в електрофоретичній камері. Встановлення додаткового блока створює умови для ефективного дослідження процесу контролю параметрів частинок водних розчинів та автоматизації розробленої системи. Корисна модель пояснюється кресленням, де представлена блок-схема системи. Блок-схема системи містить джерело когерентного випромінювання - імпульсний лазер 1, модулятор добротності 2, систему дзеркал 3, 4, короткофокусний об'єктив 5, точковий просторовий фільтр 6, довгофокусний об'єктив 7, голограму 8, об'єкт дослідження 9, генератор звукових коливань 10, фотокамеру 11 та блок рівнеміру рідинний ультразвуковий 12. Запропонована система працює наступним чином. За допомогою імпульсного лазера 1, який працює у режимі вільної генерації, дзеркал 3, 4, об'єктивів 5, 7 та точкового просторового фільтру 6 формується пучок випромінювання, який освітлює об'єкт 9, що досліджується, реєструється голограма 8 нерухомої поверхні об'єкта 9 у зустрічних пучках. Потім збуджуються коливання об'єкта 9, що досліджується, за допомогою генератора 10 звукових коливань ГЗ-109, його величина відтворюється модулятором добротності 2 в режимі модуляції добротності випромінювання імпульсного лазера 1 та 1 UA 104806 U 5 10 15 20 25 30 реєструється голографічна інтерферограма збудженого амплітудного стану об'єкта 9 за допомогою фотокамери 11. За рахунок використання блока рівнеміру рідинного ультразвукового 12 визначається тривалість імпульсу випромінювання лазера у режимі модуляції добротності, значення якої -9 знаходиться на рівні t=20·10 с, що на багато порядків менше періоду коливань, які -5 визначаються при дослідженнях (T=10 с при частоті механічних коливань f=100 кГц). Відстань між перетворювачем п'єзоелектричним становить не менше 40 мм, глибина занурення в рідині не менше 50 мм, кут між віссю датчиків й трубопроводом знаходиться в межах від 0 до 90°. Таким чином, система забезпечує вимірювання рівня (висоти) від дна (місця розташування) перетворювачем п'єзоелектричним об'єкта дослідження, який розташований в електрофоретичній камері, а також в трубопроводах, лотках та каналах при наявності окремо розташованої камери. Для перевірки точності визначення рівня (висоти) від дна (місця розташування) перетворювачем п'єзоелектричним об'єкта дослідження, рекомендується використання методу автоматизації, який визначає основні технічні параметри - координати місця розташування об'єкта, в якому відбувається дослідження. Система має надійне модульне виконання, внаслідок використання рівнеміра рідинного ультразвукового, принцип дії якого полягає на постійному випромінюванні частотномодульованого СВЧ-сигналу в діапазоні 24,15-26,05 ГГц, що забезпечує точне вимірювання у великих резервуарах і об'ємах. Точно сфокусований промінь зводить до мінімуму кількість неточних (хибних) відображень, забезпечуючи в складних технологічних умовах потоку рідинного середовища точність вимірювань, яка знаходиться в межах ("плюс"/"мінус") 3 мм. Програмне забезпечення системи оптимізоване для технологічних вимірювань, його висока чутливість припускає широкий діапазон використання для технічних рідин. Таким чином, введення в систему рівнеміра рідинного ультразвукового створює умови для проведення технологічних вимірювань з виключними характеристиками, які відбуваються безперервно, з високою точністю надійності й достатньому технічному рівні, з використанням простих технічних засобів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 1. Система для визначення розташування частинок в рідинному середовищі, що містить джерело когерентного випромінювання - імпульсний лазер, модулятор добротності, систему дзеркал, короткофокусний об'єктив, точковий просторовий фільтр, довгофокусний об'єктив, голограму, об'єкт для дослідження, генератор звукових коливань та фотокамеру, яка відрізняється тим, що додатково введений блок рівнеміру рідинного ультразвукового з можливістю визначення точного місця розташування об'єкта, який досліджується. 2. Система за п. 1, яка відрізняється тим, що блок рівнеміру рідинного ультразвукового встановлений з можливістю пересування в чверті, обмеженій 90°. 2 UA 104806 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01N 15/00, G01H 9/00
Мітки: система, визначення, розташування, частинок, рідинному, середовищі
Код посилання
<a href="https://ua.patents.su/5-104806-sistema-dlya-viznachennya-roztashuvannya-chastinok-v-ridinnomu-seredovishhi.html" target="_blank" rel="follow" title="База патентів України">Система для визначення розташування частинок в рідинному середовищі</a>
Система автоматичного табельного обліку, визначення місця розташування персоналу, транспортних засобів і стану газового середовища в шахтах
Номер патенту: 39934
Опубліковано: 25.03.2009
Автори: Широков Ігор Борисович, Котлярів Олександр Костянтинович, Богуцкий Володимир Борисович, Яуфман Анатолій Іванович
МПК: A62B 7/10
Мітки: табельного, визначення, газового, стану, автоматичного, місця, середовища, обліку, транспортних, засобів, персоналу, система, розташування, шахтах
Формула / Реферат:
Система автоматичного табельного обліку, визначення місця розташування персоналу, транспортних засобів і стану газового середовища в шахтах, що містить зчитувачі позиціювання, установлені в головних світильниках гірників, індивідуальні датчики рівня метану в газовому середовищі і передавачі місця розташування, стаціонарні датчики рівня метану в газовому середовищі, контролери, кабель, сервер системи, яка відрізняється тим, що індивідуальні...
Вимірювальна система для визначення кількості магнітних частинок у зразку
Номер патенту: 102999
Опубліковано: 25.11.2015
Автори: Черевко Костянтин Володимирович, Ніколаєнко Тимофій Юрійович
МПК: G01N 27/00, G01R 33/00
Мітки: частинок, зразку, магнітних, визначення, кількості, система, вимірювальна
Формула / Реферат:
1. Вимірювальна система для визначення кількості магнітних частинок у зразку, що містить підкладку, електромагнітну структуру, виконану у формі витків котушки з електропровідного матеріалу, що сформована з можливістю прийому зразка з магнітними частинками, генератор електричного струму для створення електричного струму в електромагнітній структурі, вимірювач індуктивності електромагнітної структури та засіб співставлення значень...
Спосіб збудження сейсмічних хвиль в рідинному середовищі
Номер патенту: 53254
Опубліковано: 27.09.2010
Автори: Пасічник Володимир Дмитрович, Гошовський Сергій Володимирович, Войтенко Юрій Іванович
МПК: G01V 1/40
Мітки: рідинному, збудження, сейсмічних, хвиль, середовищі, спосіб
Формула / Реферат:
1. Спосіб збудження сейсмічних хвиль в рідинному середовищі при наявності гідростатичного тиску шляхом використання явища імплозії, що включає утворення в рідинному середовищі вакуумної порожнини, який відрізняється тим, що вакуумну порожнину в рідинному середовищі утворюють руйнуванням частини вміщуючого наповнену повітрям порожнину герметичного корпусу-мембрани в результаті дії на неї наявного гідростатичного тиску.2. Спосіб за...
Пристрій для визначення кількості частинок домішок у воді
Номер патенту: 96828
Опубліковано: 25.02.2015
Автори: Мовчан Сергій Іванович, Васюренко Сергій Сергійович, Морозов Микола Вікторович
МПК: G01N 15/00
Мітки: пристрій, кількості, визначення, частинок, домішок, води
Формула / Реферат:
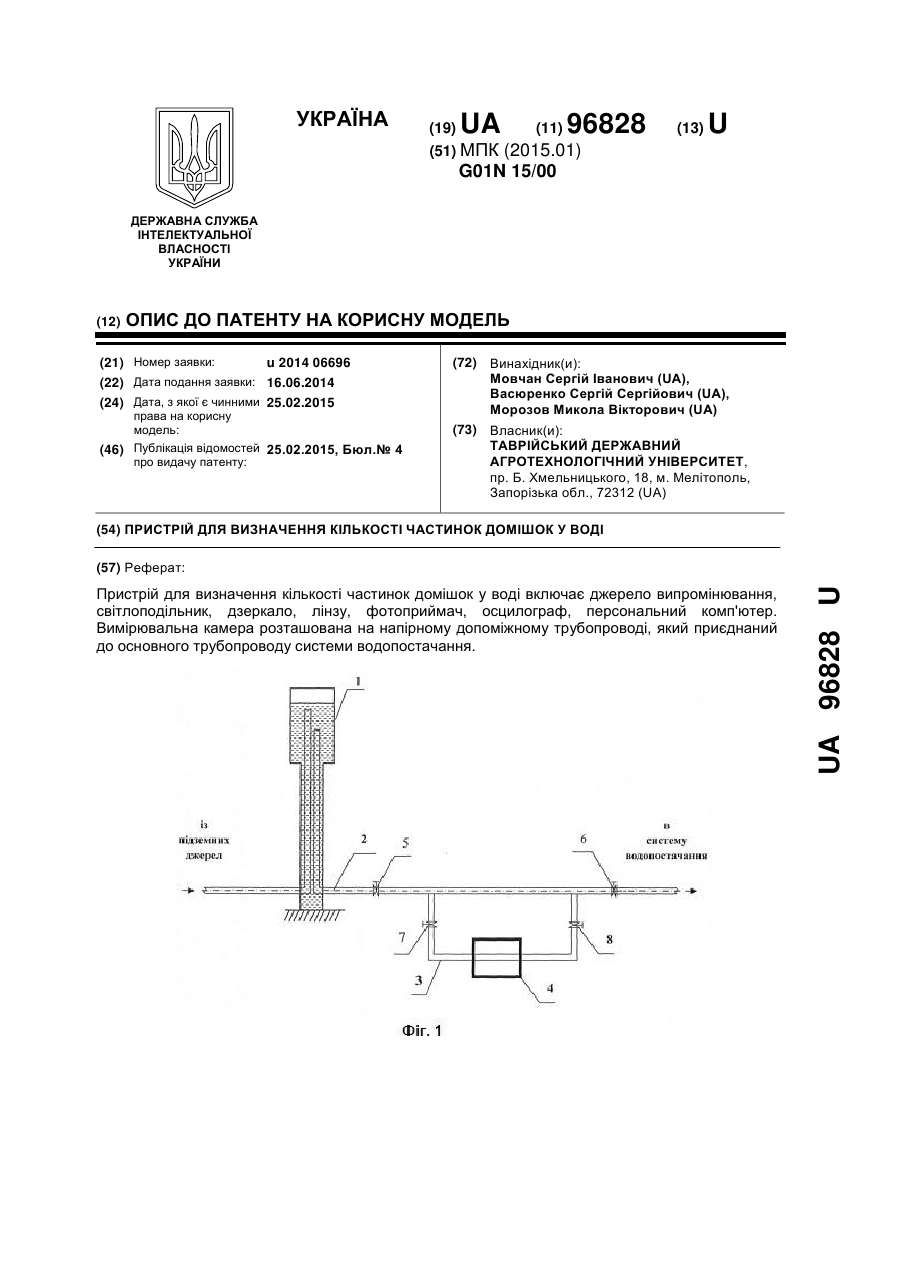
Пристрій для визначення кількості частинок домішок у воді, що включає джерело випромінювання, світлоподільник, дзеркало, лінзу, фотоприймач, осцилограф, персональний комп'ютер, який відрізняється тим, що вимірювальна камера розташована на напірному допоміжному трубопроводі, який приєднаний до основного трубопроводу системи водопостачання.
Система автоматичного табельного обліку, визначення місця розташування персоналу, транспортних засобів, стану газового середовища в шахтах, перманентного контролю серцевого ритму кожного шахтаря і залишкової єм
Номер патенту: 52839
Опубліковано: 10.09.2010
Автори: Широков Ігор Борисович, Котляров Олександр Костянтинович
МПК: A61B 5/00, G01R 31/36
Мітки: шахтах, персоналу, табельного, розташування, перманентного, стану, шахтаря, визначення, ритму, кожного, система, засобів, автоматичного, середовища, місця, транспортних, газового, обліку, залишкової, контролю, серцевого
Формула / Реферат:
Система автоматичного табельного обліку, визначення місця розташування персоналу, транспортних засобів, стану газового середовища в шахтах, що містить зчитувачі позиціювання, встановлені стаціонарно, індивідуальні датчики рівня метану в газовому середовищі, радіоприймачі-передавачі, стаціонарні датчики рівня метану в газовому середовищі, мікроконтролери, лінії зв'язку, сервер системи, центральний комп'ютер диспетчера і комп'ютери...
Попередній патент: Універсально-інформаційний пристрій для посіву та догляду за сільськогосподарськими культурами
Наступний патент: Спосіб профілактики інфекційних ускладнень після оперативних втручань в гінекології
Випадковий патент: Пристрій для поверхневої обробки матеріалів