Спосіб ультразвукового локального позиціонування рухомих об’єктів з адаптацією до звукового каналу
Номер патенту: 105710
Опубліковано: 10.06.2014
Автори: Коваль Юрій Олександрович, Лівнов Віталій Олександрович
Формула / Реферат
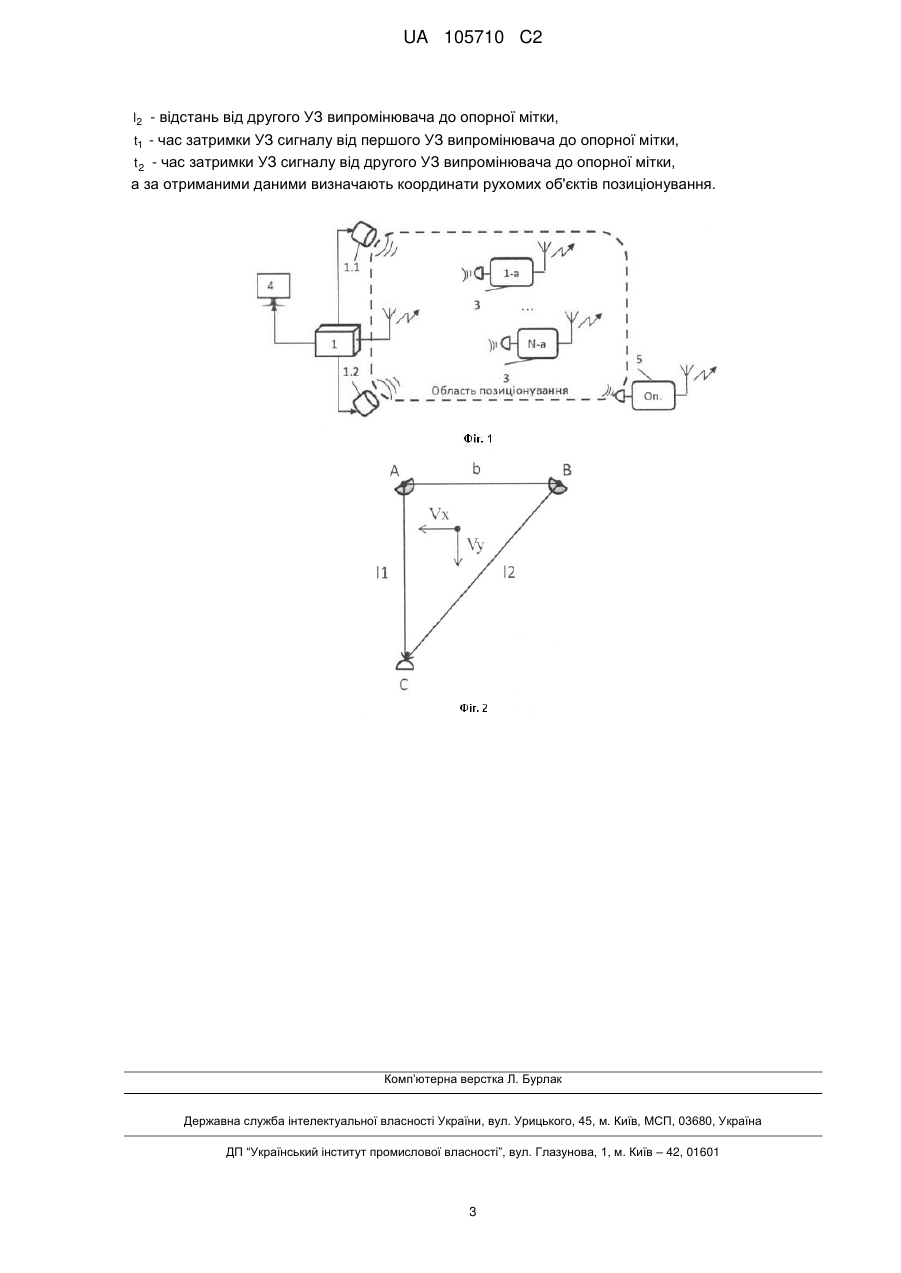
Спосіб ультразвукового локального позиціонування рухомих об'єктів з адаптацією до звукового каналу, за яким визначають координати декількох об'єктів з закріпленими на них ультразвуковими (УЗ) мітками, при цьому задають область позиціонування та розташовують в ній два УЗ випромінювачі, за допомогою базової станції по радіоканалу синхронізують лічильники часу УЗ міток з моментом випромінювання УЗ сигналу УЗ випромінювачами, УЗ мітки приймають цей сигнал і їх лічильники фіксують час затримки сигналу, який передається по радіоканалу на базову станцію по запиту з номером УЗ мітки, базова станція пересилає отриману інформацію в персональний комп'ютер (ПК) для подальшої обробки і визначення координат кожної мітки, причому позиціонування рухомих об'єктів здійснюють по закріплених на них УЗ мітках, який відрізняється тим, що у визначеному місці області позиціонування встановлюють опорну УЗ мітку, за допомогою опорної мітки вимірюють час затримки УЗ сигналу на фіксованій відстані від УЗ випромінювачів, причому опорну мітку встановлюють на тій же висоті над областю позиціонування, що і УЗ випромінювачі, а відрізок, що з'єднує опорну мітку та один із УЗ випромінювачів, та відрізок, що з'єднує обидва УЗ випромінювачі, який є базовим відрізком, повинні перетинатися під прямим кутом, час затримки УЗ сигналу передають на ПК за допомогою базової станції, де розраховують складові швидкості звуку ![]() та
та ![]() за формулами:
за формулами:
![]() ,
,
![]() ,
,
де
![]() - відстань від першого УЗ випромінювача до опорної мітки,
- відстань від першого УЗ випромінювача до опорної мітки,
![]() - відстань від другого УЗ випромінювача до опорної мітки,
- відстань від другого УЗ випромінювача до опорної мітки,
![]() - час затримки УЗ сигналу від першого УЗ випромінювача до опорної мітки,
- час затримки УЗ сигналу від першого УЗ випромінювача до опорної мітки,
![]() - час затримки УЗ сигналу від другого УЗ випромінювача до опорної мітки,
- час затримки УЗ сигналу від другого УЗ випромінювача до опорної мітки,
а за отриманими даними визначають координати рухомих об'єктів позиціонування.
Текст
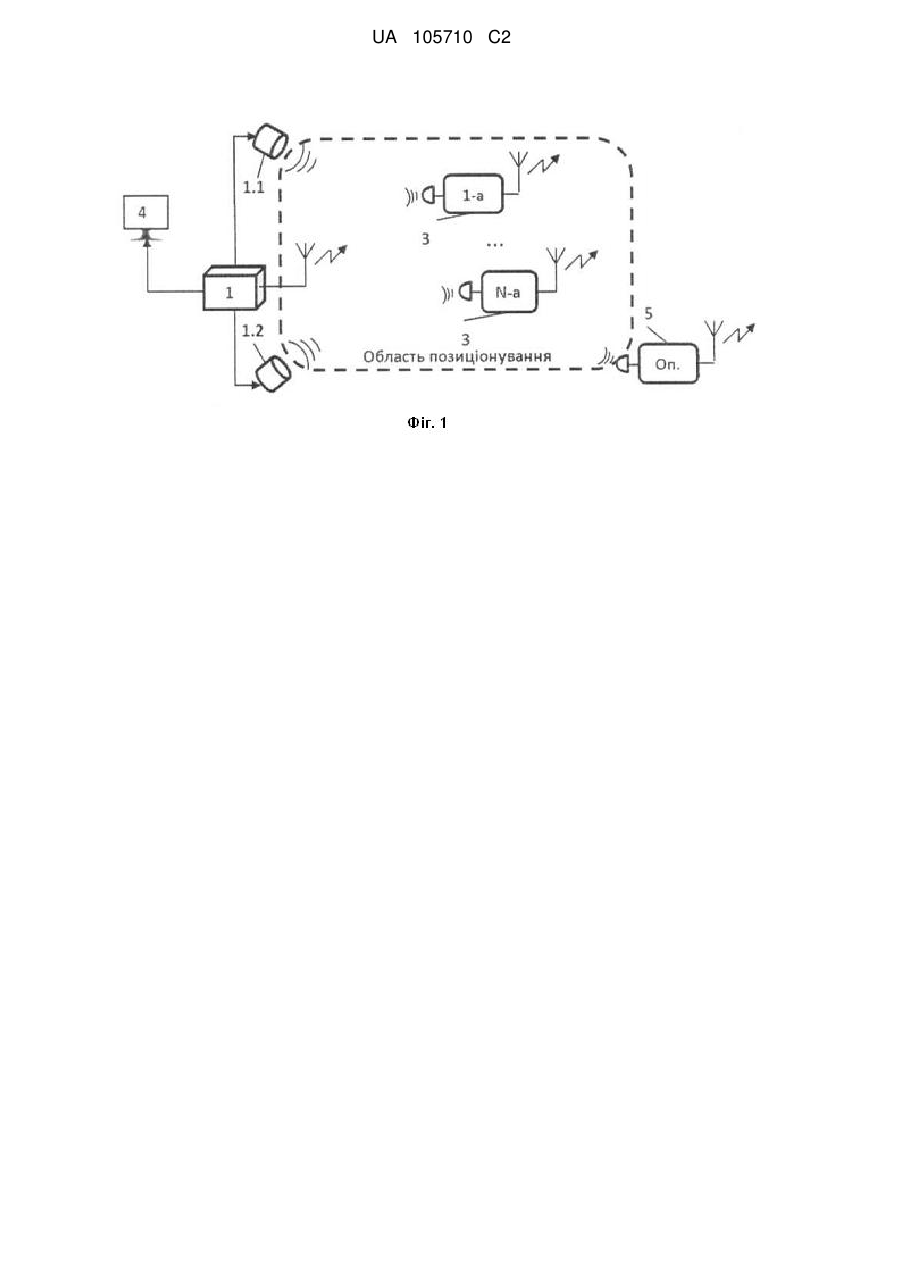
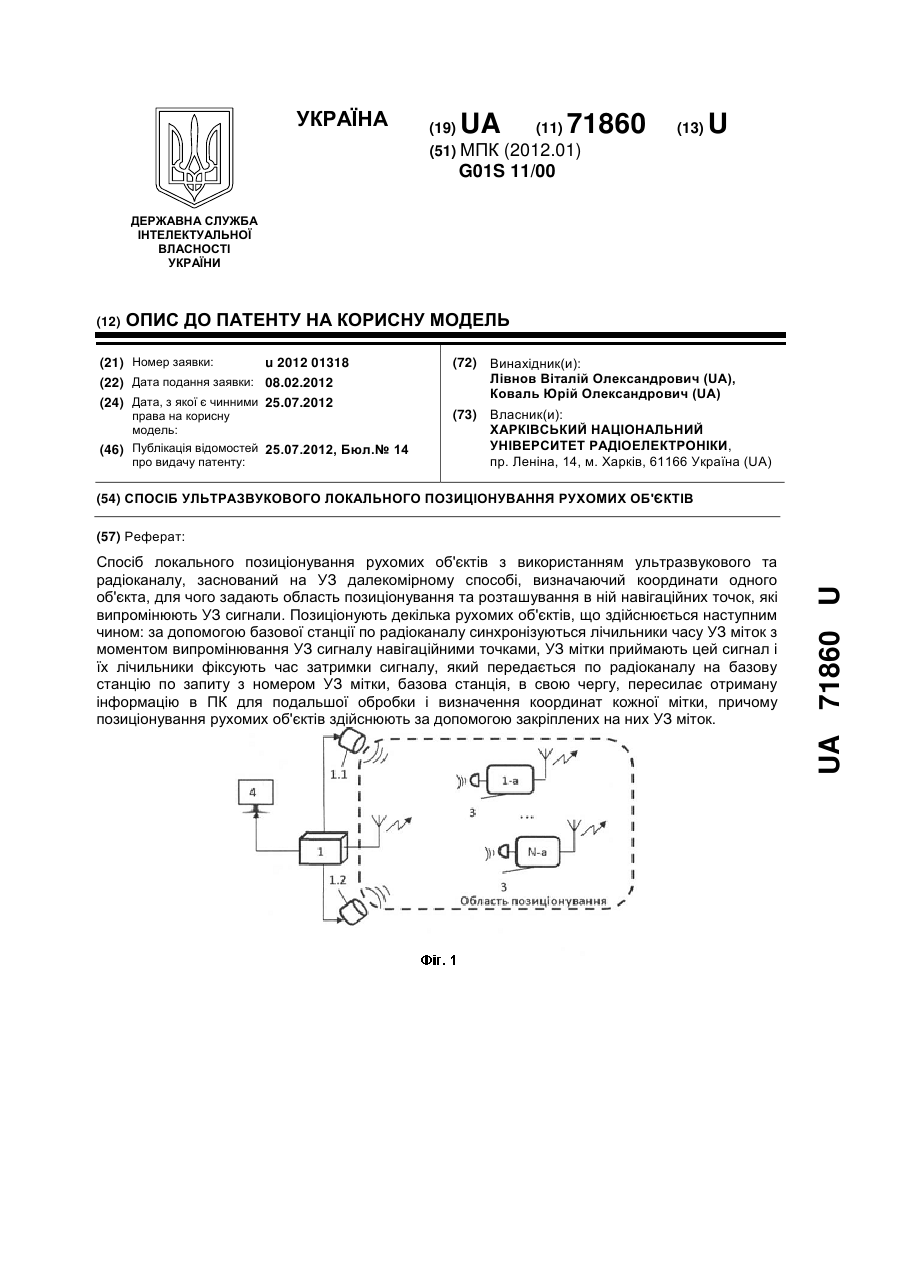
Реферат: Винахід належить до техніки позиціонування і може бути використаний для відстеження переміщення спортсменів, слідкування за рухом вантажів, частин механізмів в промисловості, тощо. За способом ультразвукового локального позиціонування рухомих об'єктів з адаптацією до звукового каналу визначають координати декількох об'єктів з закріпленими на них ультразвуковими (УЗ) мітками. При цьому задають область позиціонування та розташовують в ній два УЗ випромінювачі, за допомогою базової станції по радіоканалу синхронізують лічильники часу УЗ міток з моментом випромінювання УЗ сигналу УЗ випромінювачами. УЗ мітки приймають цей сигнал і їх лічильники фіксують час затримки сигналу, який передається по радіоканалу на базову станцію по запиту з номером УЗ мітки. Базова станція пересилає отриману інформацію в персональний комп'ютер (ПК) для подальшої обробки і визначення координат кожної мітки. Згідно з винаходом, у визначеному місці області позиціонування встановлюють опорну УЗ мітку, за допомогою опорної мітки вимірюють час затримки УЗ сигналу на фіксованій відстані від УЗ випромінювачів, причому опорну мітку встановлюють на тій же висоті над областю позиціонування, що і УЗ випромінювачі. Відрізок, що з'єднує опорну мітку та один із УЗ випромінювачів, та відрізок, що з'єднує обидва УЗ випромінювачі, повинні перетинатися під прямим кутом. Час затримки УЗ сигналу передають на ПК за допомогою базової станції, де розраховують складові швидкості звуку за відповідними формулами, а за отриманими даними визначають координати рухомих об'єктів позиціонування. Спосіб забезпечує підвищення точності позиціонування за рахунок зменшення похибок. UA 105710 C2 (12) UA 105710 C2 UA 105710 C2 5 10 15 20 25 30 35 40 45 Винахід належить до техніки позиціонування і призначений для визначення координат рухомих та малорухомих об'єктів в локальній області позиціонування в режимі реального часу з похибкою менше 1 см. Спосіб ультразвукового локального позиціонування рухомих об'єктів з адаптацією до звукового каналу може знайти застосування для відстеження та запису переміщення спортсменів по ігровому полю під час матчу, слідкуванні за рухом вантажів та частин механізмів в промисловості, а також для вирішення проблеми навігації в приміщеннях людей з проблемами зору. Відомий спосіб позиціонування з адаптацією до каналу, що використовується в системі для підводного позиціонування НіРАР (High Precision Acoustic Positioning), розробці компанії Kongsberg Maritime AS (див. Подводное позиционирование [Електронний ресурс] / © 2012 MARIMETR JSC - Режим доступу: http://www.marimeter.ru/content/view/42/87/ - 6.12.2012 р.). Ця система працює на далекомірно-кутовому методі навігації з активним відповідачем. Вона використовує датчики для вимірювання швидкості звуку у воді, дані з яких враховує при позиціонуванні, що дає змогу значно підвищити точність системи. Найбільш близьким до способу ультразвукового (УЗ) локального позиціонування рухомих об'єктів з адаптацією до звукового каналу, що заявляється, по сукупності ознак є спосіб ультразвукового позиціонування, що був описаний в патенті України № 71860 МПК G01S 11/00, опублікованому 25.05.2012 бюл. № 14. Даний спосіб заснований на УЗ далекомірному способі навігації, має можливість позиціонування декількох рухомих об'єктів у просторі, для чого використовує базову станцію і УЗ мітки, що встановлюються на рухомих об'єктах, а також УЗ канал для позиціонування і електромагнітний канал для синхронізації та обміну інформацією. Недоліком цього способу є похибки, пов'язані з непостійністю швидкості звуку в УЗ каналі. Задачею запропонованого винаходу є збільшення точності позиціонування шляхом зменшення похибок, пов'язаних зі зміною швидкості звуку в УЗ каналі. Поставлена задача вирішується тим, що у способі ультразвукового локального позиціонування рухомих об'єктів з адаптацією до звукового каналу, за яким визначають координати декількох об'єктів з закріпленими на них УЗ мітками, при цьому задають область позиціонування та розташовують в ній два УЗ випромінювачі, за допомогою базової станції по радіоканалу синхронізують лічильники часу УЗ міток з моментом випромінювання УЗ сигналу УЗ випромінювачами, УЗ мітки приймають цей сигнал і їх лічильники фіксують час затримки сигналу, який передається по радіоканалу на базову станцію по запиту з номером УЗ мітки, базова станція пересилає отриману інформацію в персональний комп'ютер (ПК) для подальшої обробки і визначення координат кожної мітки, причому позиціонування рухомих об'єктів здійснюють по закріплених на них УЗ мітках, згідно з винаходом, у визначеному місці області позиціонування встановлюють опорну УЗ мітку, за допомогою опорної мітки вимірюють час затримки УЗ сигналу на фіксованій відстані від УЗ випромінювачів, причому опорну мітку встановлюють на тій же висоті над областю позиціонування, що і УЗ випромінювачі, а відрізок, що з'єднує опорну мітку та один із УЗ випромінювачів, та відрізок, що з'єднує обидва УЗ випромінювачі, який є базовим відрізком, повинні перетинатися під прямим кутом, час затримки УЗ сигналу передають на ПК за допомогою базової станції, де розраховують складові швидкості V звуку y та Vx за формулами: Vy l1 t1 , l2 t 2 Vy sin( ABC) Vx t 2 cos(ABC) , де l1 - відстань від першого УЗ випромінювача до опорної мітки, l2 - відстань від другого УЗ випромінювача до опорної мітки, t1 - час затримки УЗ сигналу від першого УЗ випромінювача до опорної мітки, 50 55 t 2 - час затримки УЗ сигналу від другого УЗ випромінювача до опорної мітки, а за отриманими даними визначають координати рухомих об'єктів позиціонування. На фіг. 1 зображена структурна схема системи для здійснення способу. На фіг. 2 зображена геометрична модель області позиціонування з опорною міткою. Розглянемо більш детальніше запропонований спосіб. Для перевірки роботи способу була розроблена система ультразвукового локального позиціонування рухомих об'єктів з адаптацією до звукового каналу (далі система), що працює на запропонованому способі. Вона має наступні відмінності від системи, що працює на способі 1 UA 105710 C2 5 10 15 20 25 30 прототипу. В визначеному місці області позиціонування встановлюється так звана опорна УЗ мітка. Метою встановлення цієї мітки є визначення швидкості звуку по координатам x та у, так як вона може змінюватись внаслідок коливань температури та руху повітряних мас (вітру). Надалі значення швидкості використовуватиметься при визначенні декартових координат УЗ міток в області позиціонування. Опорна мітка повинна встановлюватись на тій же висоті над землею (або підлогою), що й УЗ випромінювачі, а відрізок, що з'єднує опорну мітку та один з УЗ випромінювачів, та відрізок, що з'єднує обидва УЗ випромінювачі (базовий відрізок), повинні перетинатися під прямим кутом. Для охоплення більшої зони в області позиціонування опорна мітка встановлюється якнайдалі від УЗ випромінювачів. Рекомендована схема розташування опорної мітки наведена на фіг. 1. На ній зображені: базова станція (1), УЗ випромінювачі (1.1 і 1.2), УЗ мітки, що встановлюються на рухомих об'єктах (3), персональний комп'ютер (4) та опорна мітка (5), встановлена в одному з кутів області позиціонування. Алгоритм, за яким виконується розрахунок швидкості звуку пояснимо за допомогою моделі на фіг. 2. На ній у точках А та В знаходяться перший та другий УЗ випромінювачі відповідно, а в точці С встановлена опорна мітка. Відстань між УЗ випромінювачами b - це база, відрізок АВ базовий відрізок, відстань між опорною міткою та першим УЗ випромінювачем дорівнює l 1, а між міткою та другим випромінювачем – l2; кут CAB - прямий. Величини b, l1, l2, а також кута ABC наперед задані та незмінні. Введемо декартову площину наступним чином: вісь абсцис направимо паралельно базовому відрізку, а ординат - паралельно відрізку АС. Тоді швидкість звуку можна розкласти на дві складові: Vx та Vy, які і потрібно визначити. Спочатку опорна мітка вимірює затримку УЗ сигналу t1 від першого випромінювача (у т. А) до самої мітки. Програмне забезпечення (ПЗ) на ПК, отримавши ці дані, визначає складову V l t швидкості звуку Vy за наступною формулою: y 1 1 . Далі вимірюється затримка УЗ сигналу t 2 від другого випромінювача, а ПЗ обчислює складову Vx за допомогою формули: l2 t 2 Vy sin( ABC) Vx t 2 cos(ABC) , де значення Vy береться із попередніх розрахунків. За отриманими даними розрахунків визначають координати рухомих об'єктів позиціонування. Таким чином, запропонований винахід дає змогу значно підвищити точність способу ультразвукового локального позиціонування рухомих об'єктів шляхом адаптації його роботи до параметрів УЗ каналу. ФОРМУЛА ВИНАХОДУ 35 40 45 50 Спосіб ультразвукового локального позиціонування рухомих об'єктів з адаптацією до звукового каналу, за яким визначають координати декількох об'єктів з закріпленими на них ультразвуковими (УЗ) мітками, при цьому задають область позиціонування та розташовують в ній два УЗ випромінювачі, за допомогою базової станції по радіоканалу синхронізують лічильники часу УЗ міток з моментом випромінювання УЗ сигналу УЗ випромінювачами, УЗ мітки приймають цей сигнал і їх лічильники фіксують час затримки сигналу, який передається по радіоканалу на базову станцію по запиту з номером УЗ мітки, базова станція пересилає отриману інформацію в персональний комп'ютер (ПК) для подальшої обробки і визначення координат кожної мітки, причому позиціонування рухомих об'єктів здійснюють по закріплених на них УЗ мітках, який відрізняється тим, що у визначеному місці області позиціонування встановлюють опорну УЗ мітку, за допомогою опорної мітки вимірюють час затримки УЗ сигналу на фіксованій відстані від УЗ випромінювачів, причому опорну мітку встановлюють на тій же висоті над областю позиціонування, що і УЗ випромінювачі, а відрізок, що з'єднує опорну мітку та один із УЗ випромінювачів, та відрізок, що з'єднує обидва УЗ випромінювачі, який є базовим відрізком, повинні перетинатися під прямим кутом, час затримки УЗ сигналу передають на ПК за допомогою базової станції, де розраховують складові швидкості звуку Vy та Vx за формулами: Vy l1 t1 , Vx 55 l2 t 2 Vy sin( ABC) t 2 cos( ABC) , де l1 - відстань від першого УЗ випромінювача до опорної мітки, 2 UA 105710 C2 l2 - відстань від другого УЗ випромінювача до опорної мітки, t1 - час затримки УЗ сигналу від першого УЗ випромінювача до опорної мітки, t 2 - час затримки УЗ сигналу від другого УЗ випромінювача до опорної мітки, а за отриманими даними визначають координати рухомих об'єктів позиціонування. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюLivnov Vitalii Oleksandrovych, Koval Yurii Oleksandrovych
Автори російськоюЛивнов Виталий Алесандрович, Коваль Юрий Александрович
МПК / Мітки
МПК: G01S 11/00
Мітки: рухомих, звукового, локального, каналу, об'єктів, спосіб, позиціонування, ультразвукового, адаптацією
Код посилання
<a href="https://ua.patents.su/5-105710-sposib-ultrazvukovogo-lokalnogo-pozicionuvannya-rukhomikh-obehktiv-z-adaptaciehyu-do-zvukovogo-kanalu.html" target="_blank" rel="follow" title="База патентів України">Спосіб ультразвукового локального позиціонування рухомих об’єктів з адаптацією до звукового каналу</a>
Спосіб ультразвукового локального позиціонування рухомих об’єктів
Номер патенту: 71860
Опубліковано: 25.07.2012
Автори: Лівнов Віталій Олександрович, Коваль Юрій Олександрович
МПК: G01S 11/00
Мітки: позиціонування, рухомих, спосіб, об'єктів, локального, ультразвукового
Формула / Реферат:
Спосіб локального позиціонування рухомих об'єктів з використанням ультразвукового та радіоканалу, який заснований на УЗ далекомірному способі, що визначає координати одного об'єкта, для чого задають область позиціонування та розташування в ній навігаційних точок, які випромінюють УЗ сигнали, який відрізняється тим, що позиціонують декілька рухомих об'єктів, що здійснюється наступним чином: за допомогою базової станції по радіоканалу...
Спосіб перетворення контрольного каналу для використання його як звукового каналу/каналу даних в радіокомунікаційній системі
Номер патенту: 42676
Опубліковано: 15.11.2001
Автори: Адамчик Роберт, Грубе Гері В., Діаз Рафаель Дж., Робертс Робін С., Сасута Майкл Д.
Мітки: звукового, радіокомунікаційній, перетворення, використання, системі, даних, спосіб, каналу, контрольного
Формула / Реферат:
1. Способ преобразования действующего контрольного канала для использования в качестве звукового канала или канала данных для поддержания заданного уровня коммуникационного обслуживания в радиокоммуникационной системе, имеющей множество радиопередатчиков, ограниченное число звуковых каналов, контрольный канал, по которому посылаются контрольные сигналы, и центральный контроллер, распределяющий звуковые каналы через контрольный канал,...
Спосіб локального позиціонування при стрільбі та управлінні вогнем артилерії
Номер патенту: 60921
Опубліковано: 25.06.2011
Автори: Чигінь Василь-Степан Іванович, Свідерок Сергій Миколайович
Мітки: артилерії, позиціонування, управлінні, вогнем, локального, стрільби, спосіб
Формула / Реферат:
Спосіб локального позиціонування при стрільбі та управлінні вогнем артилерії, при роботі на вогневій позиції і веденні вогню, який відрізняється тим, що використовують систему, яка включає нову випромінювально-локаційну, топогеодезичну та навігаційну систему локального позиціонування машини СОБ і всіх гармат батареї з їх довільним розміщенням у певному наперед визначеному радіусі, нові сигналізуючі і вимірювальні пристрої, розміщені на...
Спосіб передавання дискретної інформації з адаптацією до параметрів каналу зв’язку та пристрій для його реалізації
Номер патенту: 48411
Опубліковано: 15.08.2002
Автори: Кривогубченко Сергій Григорович, Квєтний Роман Наумович, Кулик Анатолій Ярославович, Кривогубченко Денис Сергійович, Компанець Микола Миколайович
МПК: H03M 13/00
Мітки: дискретної, пристрій, передавання, параметрів, каналу, адаптацією, зв'язку, реалізації, інформації, спосіб
Формула / Реферат:
1. Спосіб передавання дискретної інформації з адаптацією до параметрів каналу зв'язку, який включає зчитування байта інформації з носія, перетворення його на послідовний код і передавання до каналу зв'язку, який відрізняється тим, що на передавальному боці додатково визначають швидкість передавання інформації, визначають період вимірювань напруги завад у каналі зв'язку, визначають середнє значення напруги завад у каналі,...
Спосіб контролю та регулювання точності суміщення фарб й позиціонування фарбовідбитків на задану координату аркуша в друкарських машинах
Номер патенту: 73390
Опубліковано: 25.09.2012
Автори: Казьмірович Олег Романович, Казьмірович Роман Владиславович
МПК: B41F 33/00, B41L 27/00, B41M 1/00
Мітки: контролю, спосіб, друкарських, регулювання, позиціонування, задану, точності, аркуша, машинах, фарб, фарбовідбитків, суміщення, координату
Формула / Реферат:
Спосіб контролю та регулювання точності суміщення фарб й позиціонування на задану координату фарбовідбитків на аркушах в друкарських машинах, який включає вимірювання та регулювання координат знаходження міток кольорів, який відрізняється тим, що вимірювання та регулювання координат позиціонування кольорів проводиться від краю аркуша, а обчислювання параметрів точності приведення фарб для всіх комбінацій кольорів проводиться за координатами...
Попередній патент: Спосіб знезараження води
Наступний патент: Спосіб одержання поверхнево-активних речовин
Випадковий патент: Різьбове з'єднання