Спосіб ультразвукового локального позиціонування рухомих об’єктів
Номер патенту: 71860
Опубліковано: 25.07.2012
Автори: Коваль Юрій Олександрович, Лівнов Віталій Олександрович

Формула / Реферат
Спосіб локального позиціонування рухомих об'єктів з використанням ультразвукового та радіоканалу, який заснований на УЗ далекомірному способі, що визначає координати одного об'єкта, для чого задають область позиціонування та розташування в ній навігаційних точок, які випромінюють УЗ сигнали, який відрізняється тим, що позиціонують декілька рухомих об'єктів, що здійснюється наступним чином: за допомогою базової станції по радіоканалу синхронізуються лічильники часу УЗ міток з моментом випромінювання УЗ сигналу навігаційними точками, УЗ мітки приймають цей сигнал і їх лічильники фіксують час затримки сигналу, який передається по радіоканалу на базову станцію по запиту з номером УЗ мітки, базова станція, в свою чергу, пересилає отриману інформацію в ПК для подальшої обробки і визначення координат кожної мітки, причому позиціонування рухомих об'єктів здійснюють за допомогою закріплених на них УЗ міток.
Текст
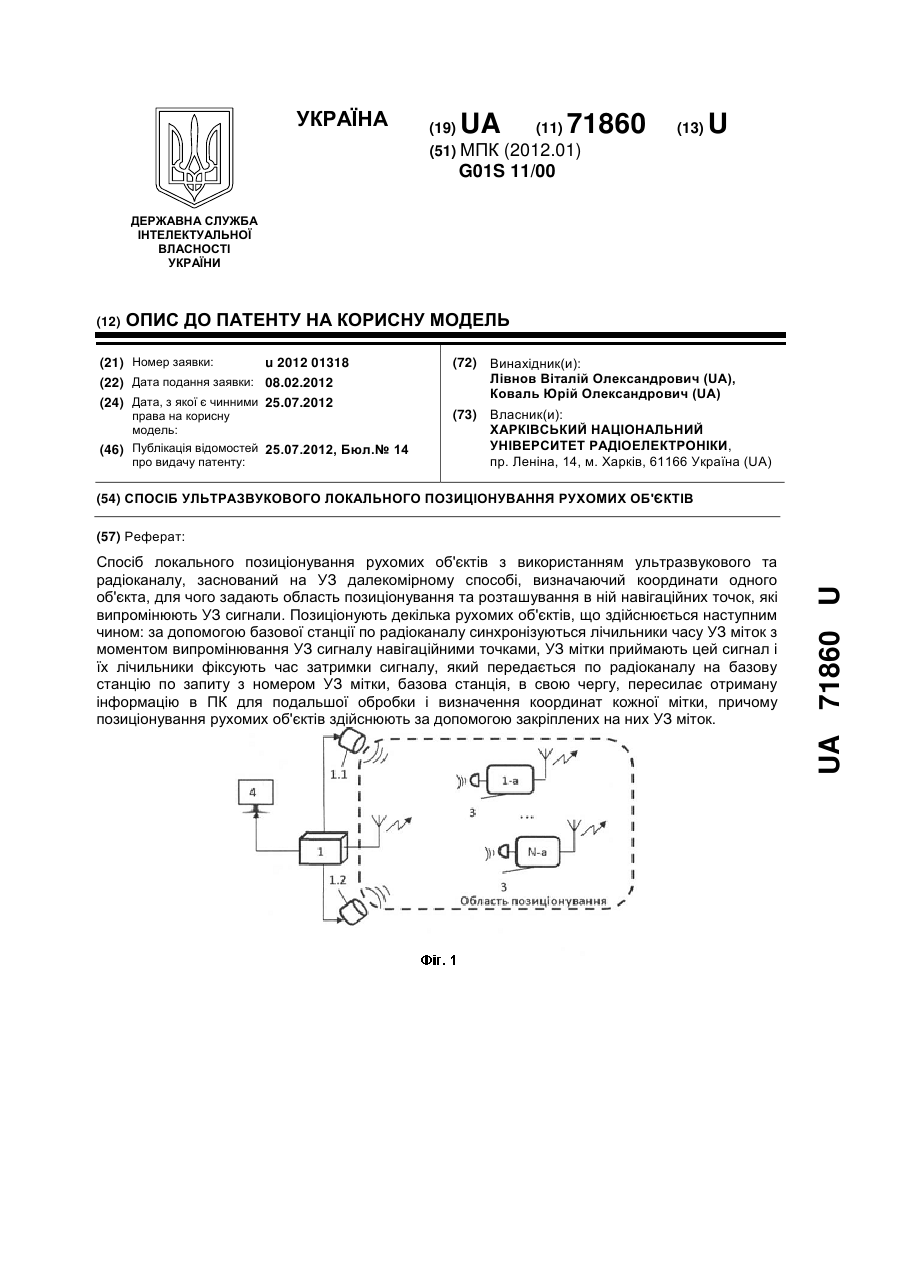
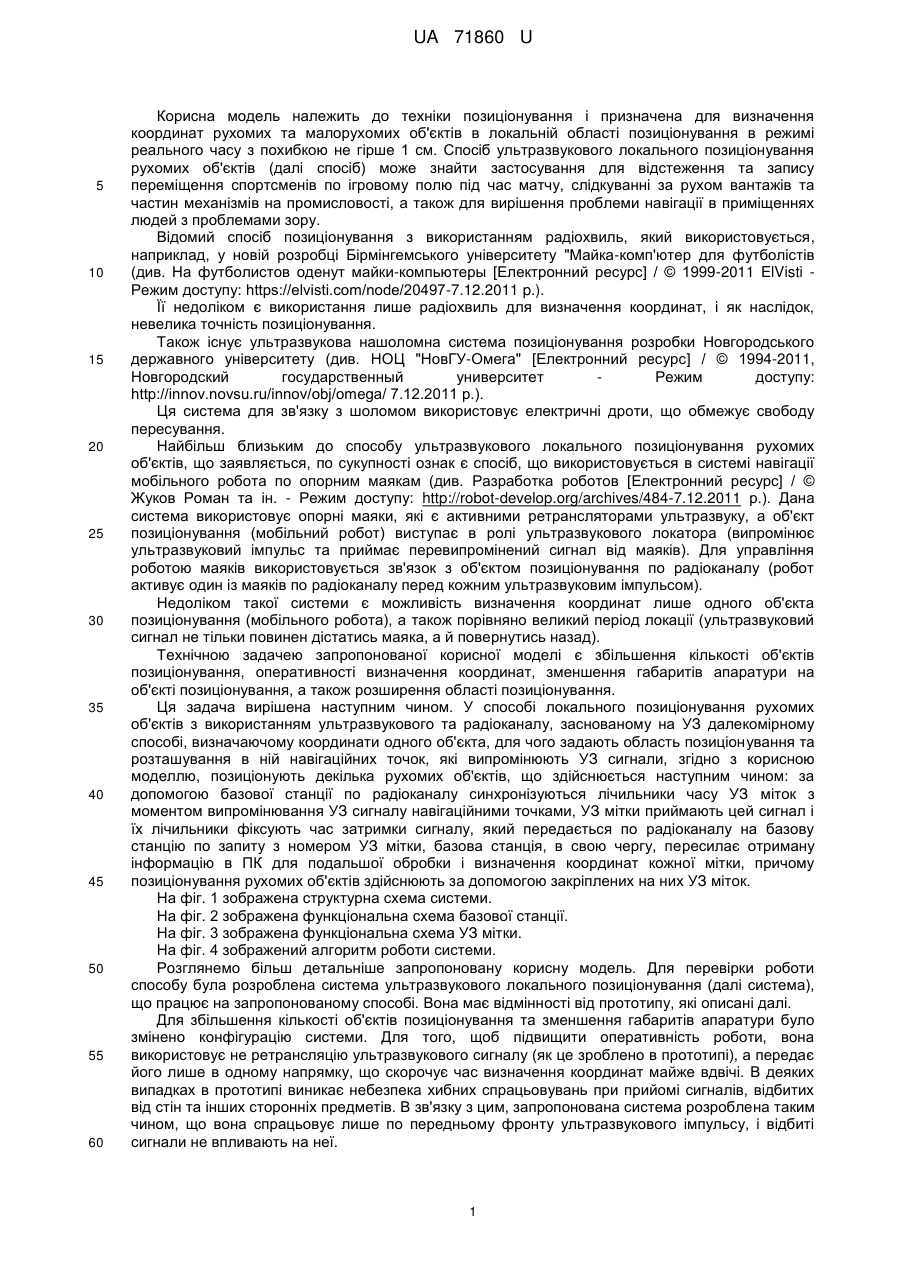
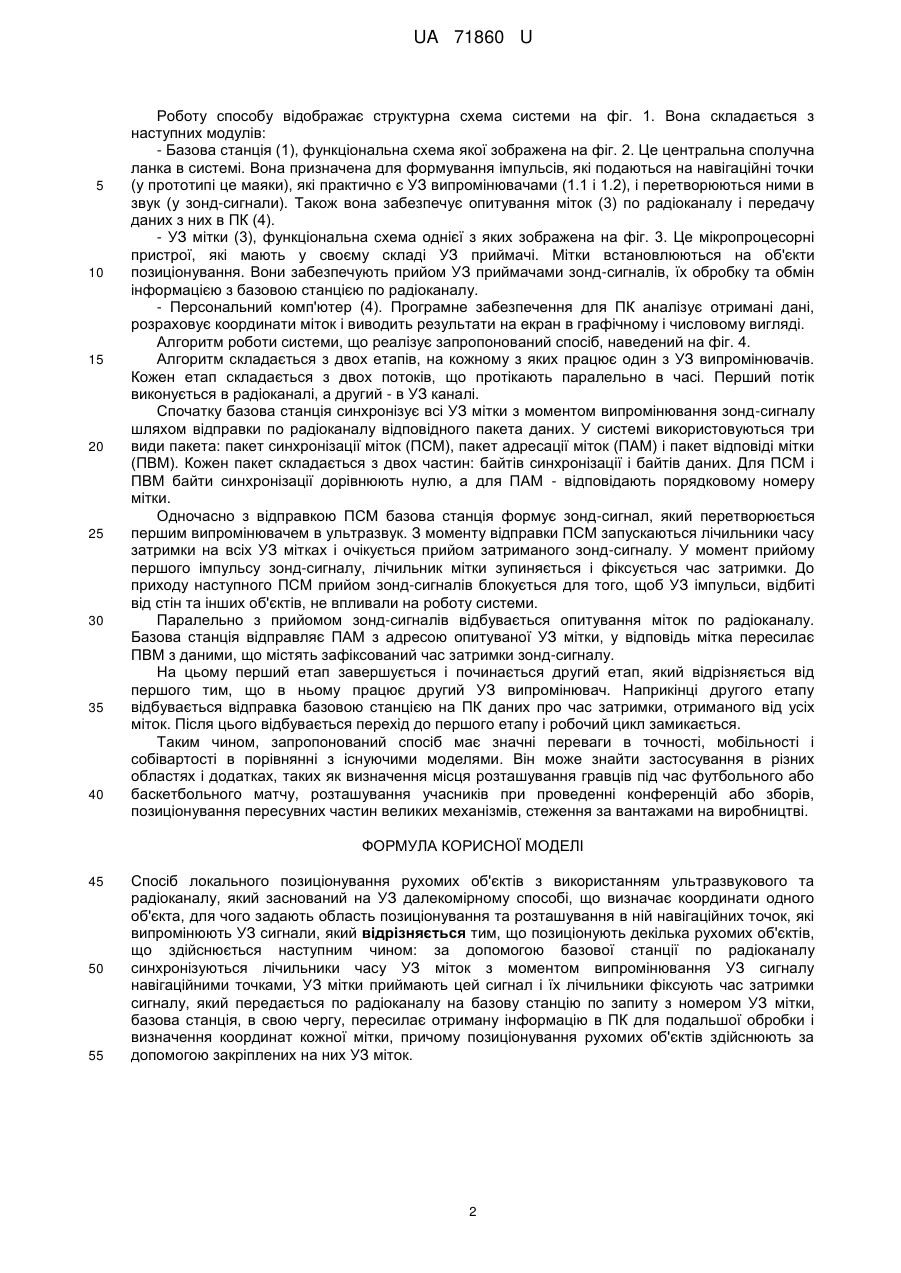
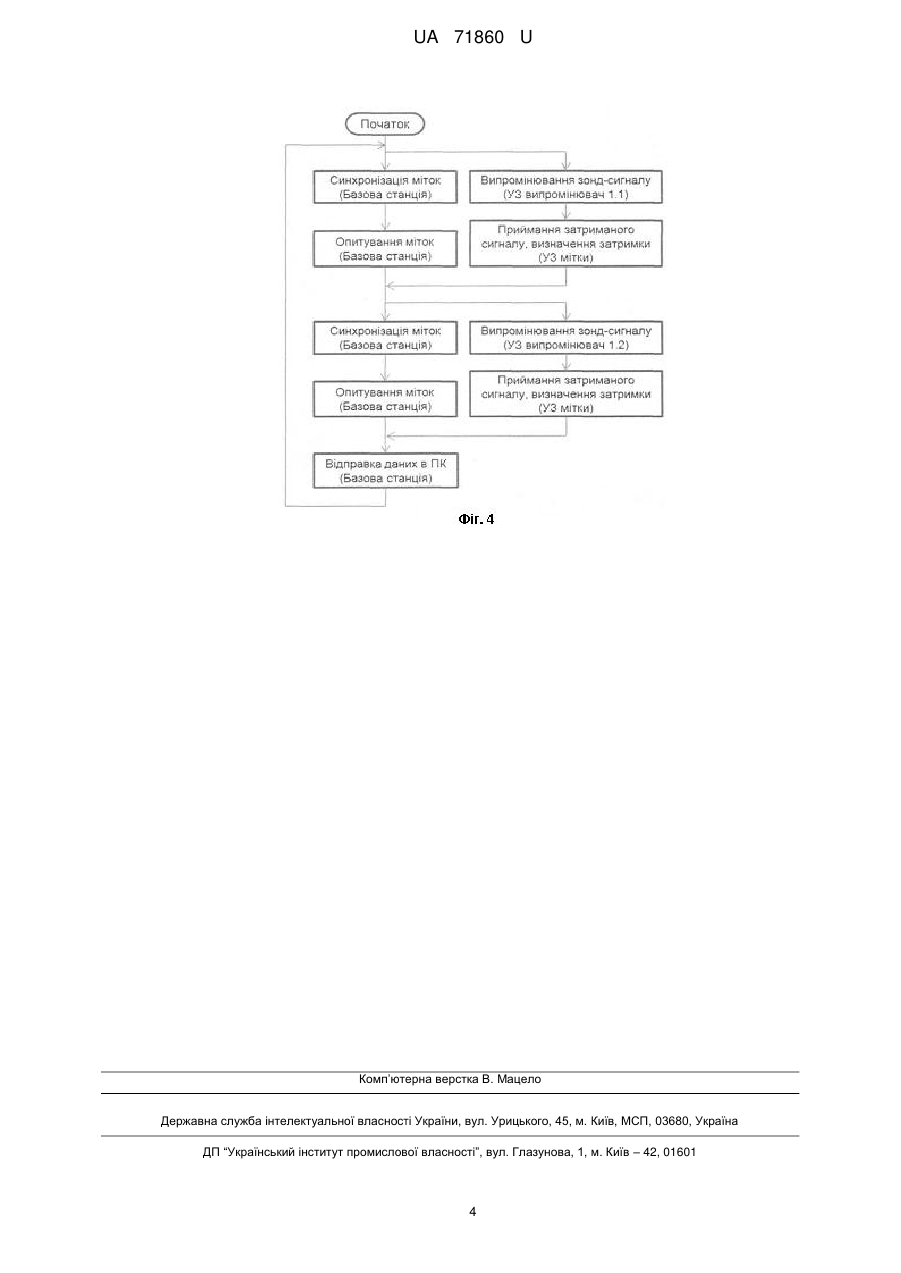
Реферат: UA 71860 U UA 71860 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до техніки позиціонування і призначена для визначення координат рухомих та малорухомих об'єктів в локальній області позиціонування в режимі реального часу з похибкою не гірше 1 см. Спосіб ультразвукового локального позиціонування рухомих об'єктів (далі спосіб) може знайти застосування для відстеження та запису переміщення спортсменів по ігровому полю під час матчу, слідкуванні за рухом вантажів та частин механізмів на промисловості, а також для вирішення проблеми навігації в приміщеннях людей з проблемами зору. Відомий спосіб позиціонування з використанням радіохвиль, який використовується, наприклад, у новій розробці Бірмінгемського університету "Майка-комп'ютер для футболістів (див. На футболистов оденут майки-компьютеры [Електронний ресурс] / © 1999-2011 ElVisti Режим доступу: https://elvisti.com/node/20497-7.12.2011 p.). Її недоліком є використання лише радіохвиль для визначення координат, і як наслідок, невелика точність позиціонування. Також існує ультразвукова нашоломна система позиціонування розробки Новгородського державного університету (див. НОЦ "НовГУ-Омега" [Електронний ресурс] / © 1994-2011, Новгородский государственный университет Режим доступу: http://innov.novsu.ru/innov/obj/omega/ 7.12.2011 р.). Ця система для зв'язку з шоломом використовує електричні дроти, що обмежує свободу пересування. Найбільш близьким до способу ультразвукового локального позиціонування рухомих об'єктів, що заявляється, по сукупності ознак є спосіб, що використовується в системі навігації мобільного робота по опорним маякам (див. Разработка роботов [Електронний ресурс] / © Жуков Роман та ін. - Режим доступу: http://robot-develop.org/archives/484-7.12.2011 р.). Дана система використовує опорні маяки, які є активними ретрансляторами ультразвуку, а об'єкт позиціонування (мобільний робот) виступає в ролі ультразвукового локатора (випромінює ультразвуковий імпульс та приймає перевипромінений сигнал від маяків). Для управління роботою маяків використовується зв'язок з об'єктом позиціонування по радіоканалу (робот активує один із маяків по радіоканалу перед кожним ультразвуковим імпульсом). Недоліком такої системи є можливість визначення координат лише одного об'єкта позиціонування (мобільного робота), а також порівняно великий період локації (ультразвуковий сигнал не тільки повинен дістатись маяка, а й повернутись назад). Технічною задачею запропонованої корисної моделі є збільшення кількості об'єктів позиціонування, оперативності визначення координат, зменшення габаритів апаратури на об'єкті позиціонування, а також розширення області позиціонування. Ця задача вирішена наступним чином. У способі локального позиціонування рухомих об'єктів з використанням ультразвукового та радіоканалу, заснованому на УЗ далекомірному способі, визначаючому координати одного об'єкта, для чого задають область позиціонування та розташування в ній навігаційних точок, які випромінюють УЗ сигнали, згідно з корисною моделлю, позиціонують декілька рухомих об'єктів, що здійснюється наступним чином: за допомогою базової станції по радіоканалу синхронізуються лічильники часу УЗ міток з моментом випромінювання УЗ сигналу навігаційними точками, УЗ мітки приймають цей сигнал і їх лічильники фіксують час затримки сигналу, який передається по радіоканалу на базову станцію по запиту з номером УЗ мітки, базова станція, в свою чергу, пересилає отриману інформацію в ПК для подальшої обробки і визначення координат кожної мітки, причому позиціонування рухомих об'єктів здійснюють за допомогою закріплених на них УЗ міток. На фіг. 1 зображена структурна схема системи. На фіг. 2 зображена функціональна схема базової станції. На фіг. 3 зображена функціональна схема УЗ мітки. На фіг. 4 зображений алгоритм роботи системи. Розглянемо більш детальніше запропоновану корисну модель. Для перевірки роботи способу була розроблена система ультразвукового локального позиціонування (далі система), що працює на запропонованому способі. Вона має відмінності від прототипу, які описані далі. Для збільшення кількості об'єктів позиціонування та зменшення габаритів апаратури було змінено конфігурацію системи. Для того, щоб підвищити оперативність роботи, вона використовує не ретрансляцію ультразвукового сигналу (як це зроблено в прототипі), а передає його лише в одному напрямку, що скорочує час визначення координат майже вдвічі. В деяких випадках в прототипі виникає небезпека хибних спрацьовувань при прийомі сигналів, відбитих від стін та інших сторонніх предметів. В зв'язку з цим, запропонована система розроблена таким чином, що вона спрацьовує лише по передньому фронту ультразвукового імпульсу, і відбиті сигнали не впливають на неї. 1 UA 71860 U 5 10 15 20 25 30 35 40 Роботу способу відображає структурна схема системи на фіг. 1. Вона складається з наступних модулів: - Базова станція (1), функціональна схема якої зображена на фіг. 2. Це центральна сполучна ланка в системі. Вона призначена для формування імпульсів, які подаються на навігаційні точки (у прототипі це маяки), які практично є УЗ випромінювачами (1.1 і 1.2), і перетворюються ними в звук (у зонд-сигнали). Також вона забезпечує опитування міток (3) по радіоканалу і передачу даних з них в ПК (4). - УЗ мітки (3), функціональна схема однієї з яких зображена на фіг. 3. Це мікропроцесорні пристрої, які мають у своєму складі УЗ приймачі. Мітки встановлюються на об'єкти позиціонування. Вони забезпечують прийом УЗ приймачами зонд-сигналів, їх обробку та обмін інформацією з базовою станцією по радіоканалу. - Персональний комп'ютер (4). Програмне забезпечення для ПК аналізує отримані дані, розраховує координати міток і виводить результати на екран в графічному і числовому вигляді. Алгоритм роботи системи, що реалізує запропонований спосіб, наведений на фіг. 4. Алгоритм складається з двох етапів, на кожному з яких працює один з УЗ випромінювачів. Кожен етап складається з двох потоків, що протікають паралельно в часі. Перший потік виконується в радіоканалі, а другий - в УЗ каналі. Спочатку базова станція синхронізує всі УЗ мітки з моментом випромінювання зонд-сигналу шляхом відправки по радіоканалу відповідного пакета даних. У системі використовуються три види пакета: пакет синхронізації міток (ПСМ), пакет адресації міток (ПАМ) і пакет відповіді мітки (ПВМ). Кожен пакет складається з двох частин: байтів синхронізації і байтів даних. Для ПСМ і ПВМ байти синхронізації дорівнюють нулю, а для ПАМ - відповідають порядковому номеру мітки. Одночасно з відправкою ПСМ базова станція формує зонд-сигнал, який перетворюється першим випромінювачем в ультразвук. З моменту відправки ПСМ запускаються лічильники часу затримки на всіх УЗ мітках і очікується прийом затриманого зонд-сигналу. У момент прийому першого імпульсу зонд-сигналу, лічильник мітки зупиняється і фіксується час затримки. До приходу наступного ПСМ прийом зонд-сигналів блокується для того, щоб УЗ імпульси, відбиті від стін та інших об'єктів, не впливали на роботу системи. Паралельно з прийомом зонд-сигналів відбувається опитування міток по радіоканалу. Базова станція відправляє ПАМ з адресою опитуваної УЗ мітки, у відповідь мітка пересилає ПВМ з даними, що містять зафіксований час затримки зонд-сигналу. На цьому перший етап завершується і починається другий етап, який відрізняється від першого тим, що в ньому працює другий УЗ випромінювач. Наприкінці другого етапу відбувається відправка базовою станцією на ПК даних про час затримки, отриманого від усіх міток. Після цього відбувається перехід до першого етапу і робочий цикл замикається. Таким чином, запропонований спосіб має значні переваги в точності, мобільності і собівартості в порівнянні з існуючими моделями. Він може знайти застосування в різних областях і додатках, таких як визначення місця розташування гравців під час футбольного або баскетбольного матчу, розташування учасників при проведенні конференцій або зборів, позиціонування пересувних частин великих механізмів, стеження за вантажами на виробництві. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Спосіб локального позиціонування рухомих об'єктів з використанням ультразвукового та радіоканалу, який заснований на УЗ далекомірному способі, що визначає координати одного об'єкта, для чого задають область позиціонування та розташування в ній навігаційних точок, які випромінюють УЗ сигнали, який відрізняється тим, що позиціонують декілька рухомих об'єктів, що здійснюється наступним чином: за допомогою базової станції по радіоканалу синхронізуються лічильники часу УЗ міток з моментом випромінювання УЗ сигналу навігаційними точками, УЗ мітки приймають цей сигнал і їх лічильники фіксують час затримки сигналу, який передається по радіоканалу на базову станцію по запиту з номером УЗ мітки, базова станція, в свою чергу, пересилає отриману інформацію в ПК для подальшої обробки і визначення координат кожної мітки, причому позиціонування рухомих об'єктів здійснюють за допомогою закріплених на них УЗ міток. 2 UA 71860 U 3 UA 71860 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for ultrasound local positioning of movable objects
Автори англійськоюLivnov Vitalii Oleksandrovych, Koval Yurii Oleksandrovych
Назва патенту російськоюСпособ ультразвукового локального позиционирования подвижных объектов
Автори російськоюЛивнов Виталий Александрович, Коваль Юрий Александрович
МПК / Мітки
МПК: G01S 11/00
Мітки: об'єктів, ультразвукового, рухомих, позиціонування, локального, спосіб
Код посилання
<a href="https://ua.patents.su/6-71860-sposib-ultrazvukovogo-lokalnogo-pozicionuvannya-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб ультразвукового локального позиціонування рухомих об’єктів</a>
Спосіб локального позиціонування при стрільбі та управлінні вогнем артилерії
Номер патенту: 60921
Опубліковано: 25.06.2011
Автори: Чигінь Василь-Степан Іванович, Свідерок Сергій Миколайович
Мітки: управлінні, артилерії, вогнем, позиціонування, спосіб, локального, стрільби
Формула / Реферат:
Спосіб локального позиціонування при стрільбі та управлінні вогнем артилерії, при роботі на вогневій позиції і веденні вогню, який відрізняється тим, що використовують систему, яка включає нову випромінювально-локаційну, топогеодезичну та навігаційну систему локального позиціонування машини СОБ і всіх гармат батареї з їх довільним розміщенням у певному наперед визначеному радіусі, нові сигналізуючі і вимірювальні пристрої, розміщені на...
Спосіб позиціонування голови глядача при використанні нашоломного дисплея
Номер патенту: 81939
Опубліковано: 25.02.2008
Автори: Ощепков Антон Анатольович, Ощепков Анатолій Миколайович
МПК: G01B 7/00, G02B 27/22, H04N 3/00
Мітки: дисплея, нашоломного, використанні, голови, спосіб, позиціонування, глядача
Формула / Реферат:
1. Спосіб позиціонування голови глядача при використанні нашоломного дисплея, при якому визначають кутове положення голови глядача відносно першої системи координат, у якій формують зображення на дисплей, і цю інформацію передають у систему візуалізації нашоломного дисплея, який відрізняється тим, що попередньо визначають вектор кутової швидкості другої, зв'язаної з головою глядача, системи координат за допомогою закріплених на його голові...
Спосіб визначення кутів нахилу датчика ультразвукового апарата до сагітальної та фронтальної площин

Номер патенту: 40040
Опубліковано: 25.03.2009
Автори: Куценок Яків Борисович, Вовченко Ганна Яківна, Гайко Оксана Георгіївна
МПК: A61B 8/00
Мітки: фронтально, визначення, нахилу, спосіб, сагітальної, датчика, апарата, кутів, ультразвукового, площин
Формула / Реферат:
Спосіб визначення кутів нахилу датчика ультразвукового апарата до сагітальної та фронтальної площин, який включає нанесення вертикальної мітки на бокову грань датчика, фіксацію нитки з вантажем на верхній його грані на рівні мітки, розташування та переміщення датчика на шкірі обстежуваної ділянки, який відрізняється тим, що додатково на задню грань датчика наносять вертикальну мітку і на її рівні закріплюють нитку з вантажем, на бокову та...
Спосіб позиціонування вузлів у бездротових сенсорних мережах
Номер патенту: 65765
Опубліковано: 12.12.2011
Автори: Іваненко Вікторія Олександрівна, Зеленін Анатолій Миколайович
МПК: H04W 64/00
Мітки: вузлів, бездротових, мережах, сенсорних, спосіб, позиціонування
Формула / Реферат:
Спосіб позиціонування вузлів у бездротових сенсорних мережах, заснований на визначенні дальності між вузлами і базовими станціями, точні глобальні координати яких відомі, шляхом визначення величини загасання прийнятого пілот-сигналу, при відомому рівні переданого, який відрізняється тим, що при (n+1) базових станцій, де n - мінімально необхідна для позиціонування кількість базових станцій, кожна базова станція оснащена мотом - вузлом...
Спосіб позиціонування абонентів в мережі gsm
Номер патенту: 52369
Опубліковано: 25.08.2010
Автори: Бибка Олександр Іванович, Зеленін Анатолій Миколайович, Дереєв Олександр В'ячеславович
МПК: H04B 7/02
Мітки: абонентів, мережі, спосіб, позиціонування
Формула / Реферат:
Спосіб позиціонування абонентів в мережі GSM, що включає радіолокаційну технологію вимірювань часу проходження радіосигналу від мобільної станції до найближчих трьох базових станцій, після чого розраховують відстань до відповідних базових станцій і радіусами, відповідними до розрахованих відстаней, проводять кола з центрами, які співпадають з базовими станціями, причому точка перетину цих кіл характеризує місцезнаходження абонента (мобільної...
Попередній патент: Судно з підвищеною остійністю
Наступний патент: Спосіб in situ визначення електрофізичних параметрів та товщини плівок
Випадковий патент: Спосіб нарізування глобоїдних черв'яків