Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила
Номер патенту: 106521
Опубліковано: 10.09.2014
Автори: Павлов Вадим Володимирович, Копитова Катерина Анатоліївна
Формула / Реферат
Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила, що передбачає розрахунок сигналу керування для кожного керованого рухомого елемента конструкції крила, який подають на виконуючий механізм згаданого керованого рухомого елемента, в якому, крім того виконують перевірку умов активації з передачею сигналу керування на виконавчий механізм керованого рухомого елемента, який відрізняється тим, що згаданий сигнал керування розподіляють згідно заданій пропорції розподілення керування висотою так, що одну частину сигналу керування подають на основний контур керування за допомогою відхилення керма висоти, а другу частину сигналу керування подають на додатковий контур керування за допомогою безпосередньої зміни підйомної сили аеродинамічною схемою крила та вибирають за допомогою бортового обчислювача серед можливих варіантів комбінацій відхилення кожного з рухомих складових конструкції крила, які розраховують відповідно до умов та параметрів польоту через вагові коефіцієнти функції підтримки прийняття рішень.
Текст
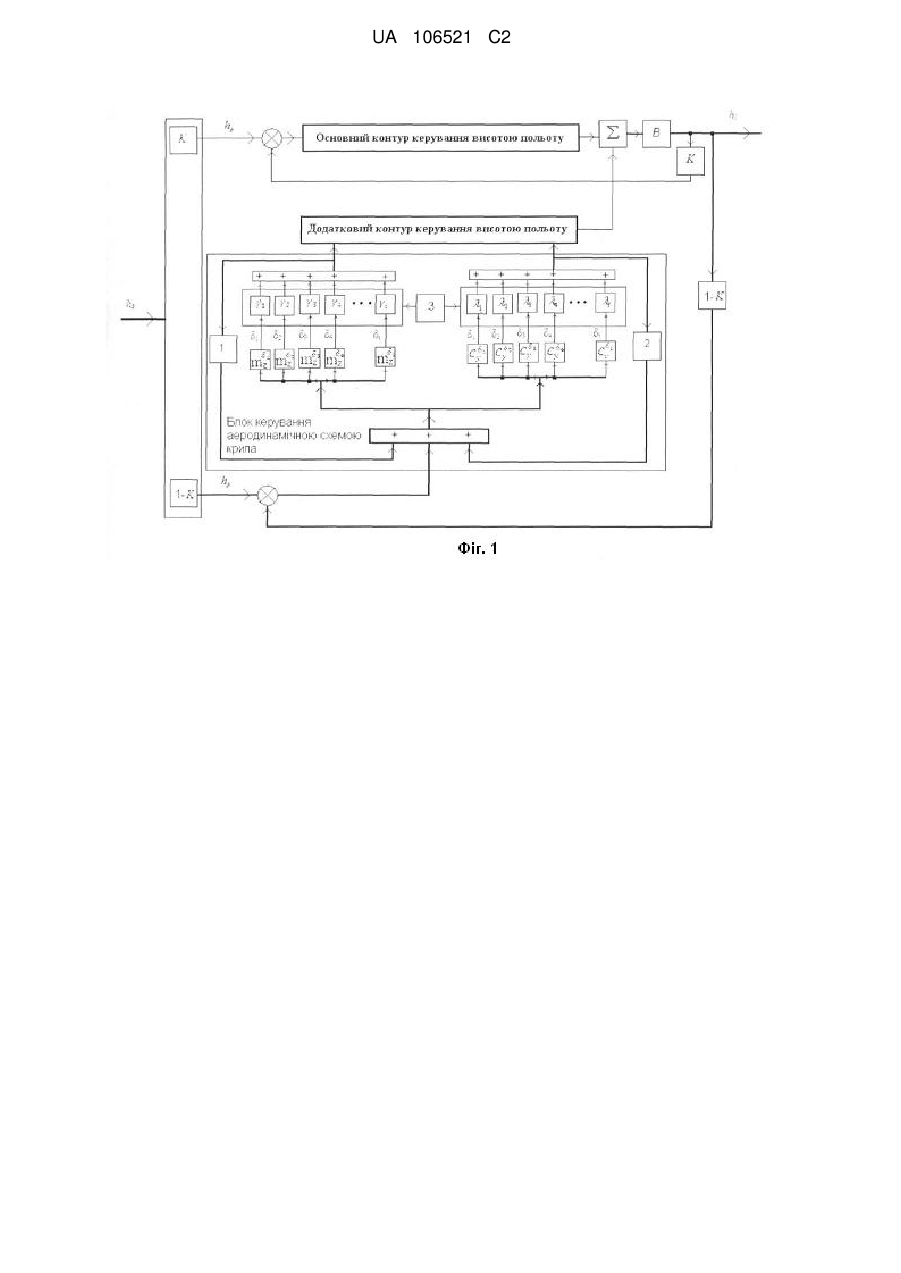
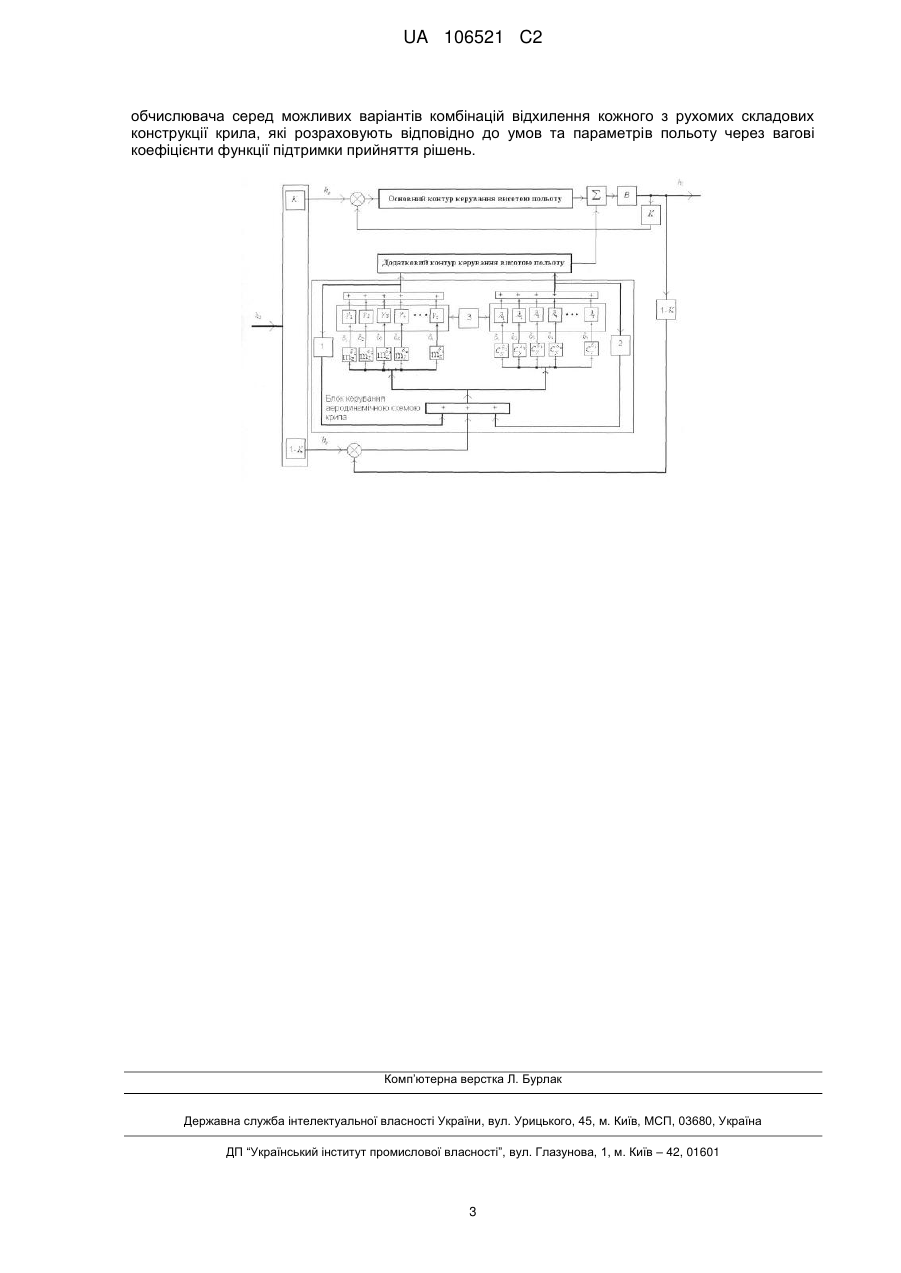
Реферат: Винахід належить до авіації. Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила передбачає розрахунок сигналу керування для кожного керованого рухомого елемента конструкції крила, який подають на виконуючий механізм згаданого керованого рухомого елемента. Згаданий сигнал керування розподіляють згідно заданій пропорції розподілення керування висотою так, що одну частину сигналу керування подають на основний контур керування за допомогою відхилення керма висоти. Другу частину сигналу керування подають на додатковий контур керування за допомогою безпосередньої зміни підйомної сили аеродинамічною схемою крила та вибирають за допомогою бортового обчислювача серед можливих варіантів комбінацій відхилення кожного з рухомих складових конструкції крила. Такі варіанти розраховують відповідно до умов та параметрів польоту через вагові коефіцієнти функції підтримки прийняття рішень. Технічним результатом є забезпечення самоналаштування аеродинамічної схеми поверхонь керування для досягнення поставленої задачі з високою точністю та швидкістю витримування заданої траєкторії польоту. UA 106521 C2 (12) UA 106521 C2 UA 106521 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі авіації, а більш конкретно до систем автоматичного керування контуром висоти польоту повітряного судна, за допомогою використання розподіленої системи інтегрованого керування зміною аеродинамічної схеми крила. Винахід може використовуватись в системах автоматичного керування для підвищення якості та швидкості відпрацювання заданої величини висоти польоту. Відомо, що зміну аеродинамічної схеми профілю крила все частіше застосовують для підвищення якості та швидкості відпрацювання заданої траєкторії польоту повітряного судна в збуреній атмосфері або при розведенні повітряних суден у вирішенні конфліктних ситуацій в умовах обмеженого часу. Відомо спосіб (ЕР 1,184,006 А1), що забезпечує зменшення динамічних навантажень від дії вітрових збурень на конструкцію повітряного судна до мінімуму, за рахунок того, що в контур керування рухом повітряного судна від системи автоматичного керування або пілота подається згенерований сигнал виміряного значення дії збуреної атмосфери зі зворотнім знаком. Отримані вихідні величини попереднього керування приводять в дію елементи керування повітряного судна, що включають один або більше елементів поверхонь керування таких як кермо висоти, елерони та інші. Але в даному способі відсутня можливість застосування кожної з керуючих поверхонь та можливість синхронізації керування відхиленням керма висоти з відхиленням компонентів аеродинамічної схеми крила, що приводить до покращення якості та збільшення швидкості компенсації дії вітрових збурень. Спосіб, відповідно до патенту RU 2,377,159 С1, зменшення дії вертикальної складової турбулентності на політ повітряного судна, відповідно до якого в ході польоту виконується наступна послідовність етапів, в котрих: α) вертикальну складову визначають за відхиленням повітряного судна; с) розраховують сигнал керування щонайменше для одного керованого рухомого елемента конструкції крила, що дає змогу мінімізувати амплітуду коефіцієнтів навантаження, які викликані дією вертикальної складової турбулентності, та e) згаданий сигнал керування передають щонайменше на один виконуючий механізм згаданого керованого рухомого елемента, в якому, крім того, в ході згаданого польоту автоматичним способом виконують наступні етапи, в яких: b) за допомогою згаданої дії вертикальної складової вітру визначають її вплив на політ повітряного судна як функцію відхилення коефіцієнта вертикальної складової навантаження на повітряне судно в рівновазі та коефіцієнт навантаження в результаті дії вертикальної турбулентності, та d) виконують перевірку, щоб впевнитися, чи реалізовані умови активації, залежні від рівня небезпеки польоту повітряного судна, та на етапі e) сигнал керування передають на виконавчий механізм керованого рухомого елемента, якщо реалізовані згадані умови активації. Але в даному способі відсутня можливість розподілення виконання розрахованого сигнал керування, яке синхронізує роботу керма висоти з компонентами аеродинамічної схеми крила або можливими комбінаціями їх відхилення. У пристрої за даним патентом немає жодного обчислювального пристрою, який би перерозподіляв навантаження між рухомими елементами механізації крила з найкращою аеродинамічною ефективністю. Поставлена задача досягається створенням такого способу автоматичного керування зміною висоти польоту, в якому у заданій пропорції подається сигнал керування в основний контур, який керує відхиленням керма висоти, та містить додатковий контур, який керує зміною аеродинамічної схеми крила. Додатковий контур керування висотою польоту містить обчислювач для вибору відповідно до умов польоту аеродинамічної схеми крила та формування величин сигналів керування зміною аеродинамічних сил та моментів через вагові коефіцієнти функції підтримки прийняття рішень. Система, яка реалізує цей спосіб в автоматичному режимі, забезпечує самоналаштування аеродинамічної схеми поверхонь керування для досягнення поставленої задачі з високою якістю та швидкістю витримування заданої траєкторії польоту. Суть винаходу пояснюється кресленням, де наведено схему системи керування висотою польоту повітряного судна з блоком керування зміни аеродинамічної схеми крила. На схемі зображено: основний контур керування висотою польоту, додатковий контур керування висотою польоту з блоком керування аеродинамічною схемою крила, який вміщує 1 та 2 - блоки перевірки відпрацювання сигналу керування на відхилення компонентів профілю крила, 3-блок розрахунку сигналу керування для кожного з компонентів керованих рухомих елементів Ci конструкції крила, 1, 2, 3, 4,..., i - кути відхилення елементів механізації крила, y приріст коефіцієнтів підйомної сили від відхилення компонентів механізації крила, m z приріст моменту тангажу від відхилення компонентів механізації крила i та i - вагомі коефіцієнти функції підтримки прийняття рішень; h3 - заданий сигнал керування висотою польоту, h0 - заданий 1 UA 106521 C2 сигнал керування висотою польоту, який подається до основного контуру керування висотою польоту, h0 - заданий сигнал керування висотою польоту, який подається до додаткового контуру керування висотою польоту, hi , фактична висота польоту повітряного судна B 5 10 15 20 25 30 35 40 45 50 55 вимірювач висоти польоту K та 1 K - задані коефіцієнти пропорційності. Сигнал керування h, зміни висоти польоту подається у заданій пропорції з коефіцієнтами K та 1 K , де 0 K 1 , відповідно до основного та додаткового контурів керування висотою польоту та синхронно відпрацьовується обома контурами керування. Фактична висота польоту повітряного судна hi вимірюється обладнанням для вимірювання висоти польоту B та в тій самій пропорції через зворотній зв'язок подається на вхід відповідного контуру. Основний контур керування висотою польоту зі зворотним зв'язком, що зменшує помилку відпрацювання заданого сигналу керування висотою польоту h0 за допомогою відхилення керма висоти; додатковий контур керування висотою польоту за допомогою керування безпосередньо підйомної силою крила зі зворотним зв'язком, що зводить до мінімуму помилку відпрацювання заданого додаткового сигналу керування висотою польоту h0 , передаючи сигнал керування в блок керування аеродинамічною схемою крила. В цьому блоці бортовий комп'ютер розраховує сигнал керування для кожного з компонентів керованих рухомих елементів конструкції крила (блок 3) з обчисленням значення перерозподілу приростів i Ci підйомної сили y та моменту тангажу mz від відхилення компонентів механізації крила i відповідно до умов та параметрів польоту вибору компоненту відхилення аеродинамічної схеми крила або їх комбінацій за допомогою розрахованих заздалегідь вагових коефіцієнтів функції підтримки прийняття рішення i та i . Зворотній зв'язок через блоки перевірки відпрацювання сигналу керування на відхилення компонентів профілю крила 1 і 2 в блоці керування аеродинамічною схемою крила дозволяє простежити за ефективністю відхилення компонентів профілю крила і, в разі швидкої зміни величини заданого значення висоти польоту, скорегувати або перерозподілити сигнали керування відхилень вибраних компонентів механізації крила. Додатковий контур інтегрованої розподіленої системи керування висотою польоту використовує всі засоби зміни складної багатокомпонентної аеродинамічної схеми крила, використовуючи відхилення різних частин механізації крила або їх комбінацій. Задана додаткова величина відхилення висоти польоту повітряного судна h0 , подається на вхід додаткового контуру керування висотою польоту. Далі сигнал подається в блок 3 розрахованих заздалегідь вагових коефіцієнтів функції підтримки прийняття рішень аеродинамічної схеми повітряного судна, в якому перерозподіляються вагові коефіцієнти засобів зміни профілю крила. Завдання блоку полягає в забезпеченні самоналаштування системи розподілення сил і моментів зміни аеродинамічної схеми для відпрацювання заданої зміни висоти польоту з високою якістю та швидкістю витримування заданої траєкторії польоту повітряного судна. На виконавчі механізми, вибраних компонентів аеродинамічної схеми крила, подаються сигнали керування на відхилення відповідних компонентів аеродинамічної схеми крила. У додатковому інтегрованому контурі керування висотою польоту є блоки перевірки відпрацювання сигналу керування на відхилення компонентів профілю крила, які дозволяють простежити за ефективністю відхилення компонентів профілю крила і, в разі швидкої зміни величини заданого значення висоти польоту, скорегувати відхилення вибраних компонентів рухомих елементів конструкції крила або перерозподілити сигнали керування окремими компонентами профілю крила. ФОРМУЛА ВИНАХОДУ Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила, що передбачає розрахунок сигналу керування для кожного керованого рухомого елемента конструкції крила, який подають на виконуючий механізм згаданого керованого рухомого елемента, в якому, крім того, виконують перевірку умов активації з передачею сигналу керування на виконавчий механізм керованого рухомого елемента, який відрізняється тим, що згаданий сигнал керування розподіляють згідно заданій пропорції розподілення керування висотою так, що одну частину сигналу керування подають на основний контур керування за допомогою відхилення керма висоти, а другу частину сигналу керування подають на додатковий контур керування за допомогою безпосередньої зміни підйомної сили аеродинамічною схемою крила та вибирають за допомогою бортового 2 UA 106521 C2 обчислювача серед можливих варіантів комбінацій відхилення кожного з рухомих складових конструкції крила, які розраховують відповідно до умов та параметрів польоту через вагові коефіцієнти функції підтримки прийняття рішень. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюPavlov Vadym Volodymypovych
Автори російськоюПавлов Вадим Володимирович
МПК / Мітки
МПК: B64C 13/16, B64C 3/38, G05D 1/04
Мітки: інтегрованого, аеродинамічною, судна, керування, повітряного, спосіб, висотою, складною, крила, схемою, польоту
Код посилання
<a href="https://ua.patents.su/5-106521-sposib-integrovanogo-keruvannya-visotoyu-polotu-povitryanogo-sudna-zi-skladnoyu-aerodinamichnoyu-skhemoyu-krila.html" target="_blank" rel="follow" title="База патентів України">Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила</a>
Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила
Номер патенту: 79031
Опубліковано: 10.04.2013
Автори: Павлов Вадим Володимирович, Копитова Катерина Анатоліївна
МПК: B64C 13/16
Мітки: керування, висотою, повітряного, схемою, аеродинамічною, спосіб, польоту, складною, інтегрованого, судна, крила
Формула / Реферат:
Спосіб інтегрованого керування висотою польоту повітряного судна зі складною аеродинамічною схемою крила, що передбачає визначення вертикальної складової за відхиленням повітряного судна, розрахунок сигналу керування щонайменше для одного керованого рухомого елемента конструкції крила, який передають щонайменше на один виконуючий механізм згаданого керованого рухомого елемента, в якому, крім того, в ході польоту автоматичним способом...
Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна
Номер патенту: 102654
Опубліковано: 25.07.2013
Автори: Копитова Катерина Анатоліївна, Павлов Вадим Володимирович
МПК: B64C 13/16, B64C 13/00
Мітки: траєкторію, судна, польоту, розподіленої, збурень, вітрових, дії, аеродинамічної, компенсації, повітряного, спосіб
Формула / Реферат:
Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна, що включає вимірювання величини дії вітрового збурення, створення сигналу компенсації зміною профілю крила та подачу його до контуру керування висотою польоту, який відрізняється тим, що перед подачею сигналу компенсації зміною профілю крила до контуру керування висотою польоту створюють протилежний за знаком сигнал компенсації дії...
Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна
Номер патенту: 78068
Опубліковано: 11.03.2013
Автори: Павлов Вадим Володимирович, Копитова Катерина Анатоліївна
МПК: B64C 13/00
Мітки: компенсації, розподіленої, повітряного, дії, спосіб, аеродинамічної, траєкторію, польоту, вітрових, судна, збурень
Формула / Реферат:
Спосіб розподіленої аеродинамічної компенсації дії вітрових збурень на траєкторію польоту повітряного судна, що включає вимірювання величини дії вітрового збурення, створення сигналу компенсації зміною профілю крила та подачу його до контуру керування висотою польоту, який відрізняється тим, що перед подачею сигналу компенсації зміною профілю крила до контуру керування висотою польоту створюють протилежний за знаком сигнал компенсації дії...
Привід управління рухомою аеродинамічною поверхнею крила літака
Номер патенту: 79830
Опубліковано: 25.04.2013
Автори: Сидоренко Юрій Григорович, Бейлін Георгій Володимирович, Петренко Сергій Юрійович
МПК: B64C 13/42
Мітки: крила, привід, літака, аеродинамічною, управління, рухомою, поверхнею
Формула / Реферат:
Привід управління рухомою аеродинамічною поверхнею крила літака, що приєднана до нерухомої відносно фюзеляжу аеродинамічної поверхні літака з можливістю її повороту, що включає встановлений у порожнині нерухомої відносно фюзеляжу аеродинамічної поверхні літака рушій з вихідною обертовою ланкою, з'єднаною з рухомою аеродинамічною поверхнею крила літака, який відрізняється тим, що як рушій застосований сервопривід, вихідна обертова ланка рушія...
Спосіб використання енергії руху газоповітряного потоку двигуна повітряного судна на стоянці
Номер патенту: 63187
Опубліковано: 15.01.2004
Автори: Шульга Іван Федорович, Марчук Володимир Єфремович
МПК: F01D 1/00
Мітки: потоку, енергії, спосіб, використання, руху, судна, двигуна, повітряного, стоянці, газоповітряного
Формула / Реферат:
Спосіб використання енергії руху газоповітряного потоку двигуна повітряного судна на стоянці, при якому спалюють паливо, прогрівають і перевіряють якість роботи двигуна повітряного судна на стоянці, відхиляють і розсіюють газоповітряний потік за межами двигуна повітряного судна на стоянці, який відрізняється тим, що під час відхилювання та розсіювання газоповітряного потоку за межами двигуна повітряного судна на стоянці перетворюють енергію...
Попередній патент: Підводна гідроелектростанція
Наступний патент: Спосіб очищення каналізаційних стоків від сполук вуглецю, азоту і фосфору із використанням комбінованих очисних споруд
Випадковий патент: Спосіб сушіння вологого кеку меламіну