Ракета для метеорологічних досліджень
Номер патенту: 111883
Опубліковано: 24.06.2016
Автори: Літвінов Олександр Володимирович, Яндбердін Олексій Тімербулатович, Клочков Андрій Сергійович, Гурський Олександр Іванович, Хворостовський Анатолій Володимирович, Морозов Анатолій Сергійович, Аксьоненко Олександр Володимирович
Формула / Реферат
Ракета для метеорологічних досліджень, яка складається з ракетної частини з маршовим двигуном і хвостовим відсіком і чотириконсольним стабілізатором та головної частини, що відділяється, яка відрізняється тим, що у носовій частині головної частини з аеродинамічними рулями додатково розташована газодинамічна двигунна установка системи демпфування, орієнтації та стабілізації.
Текст
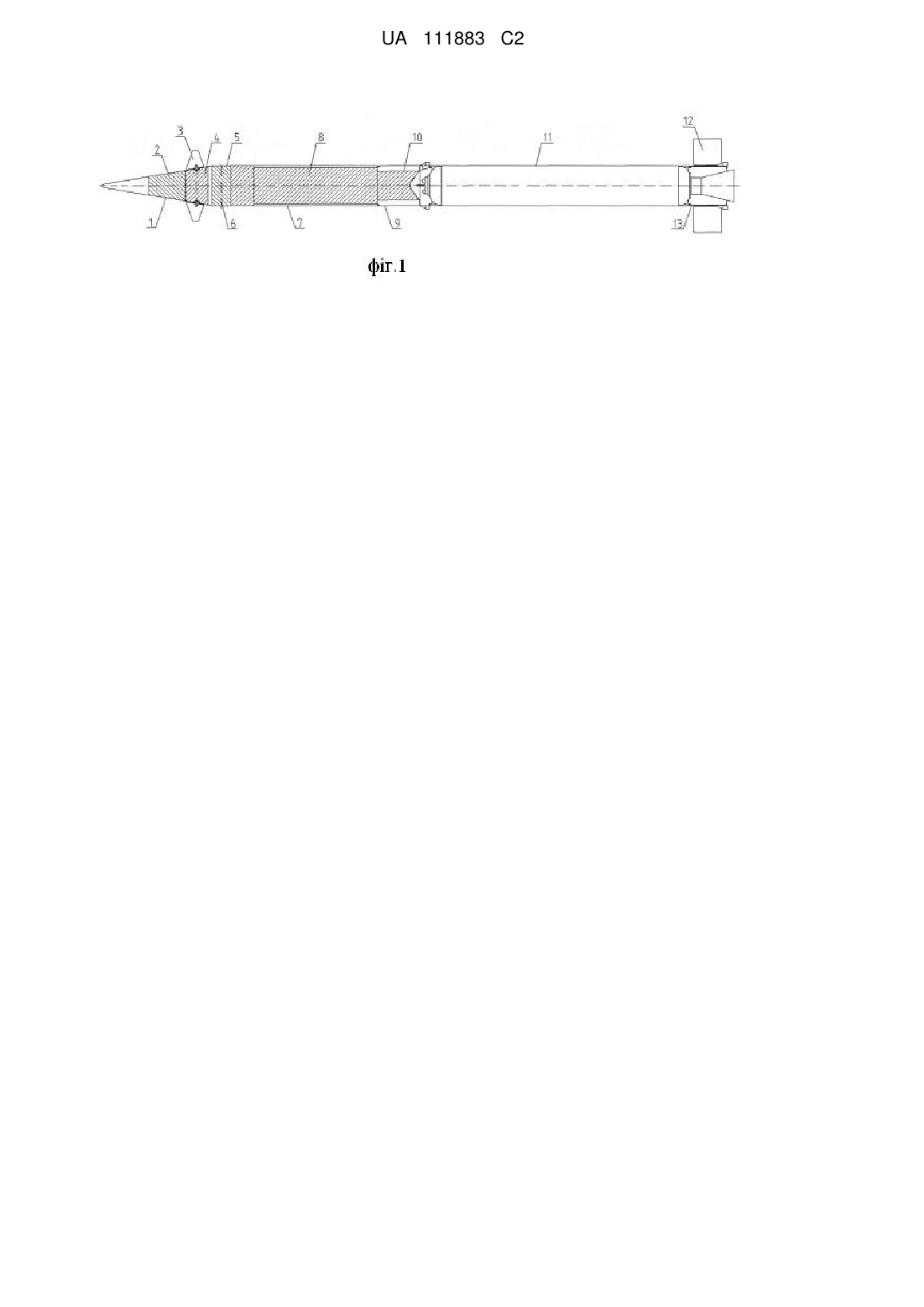
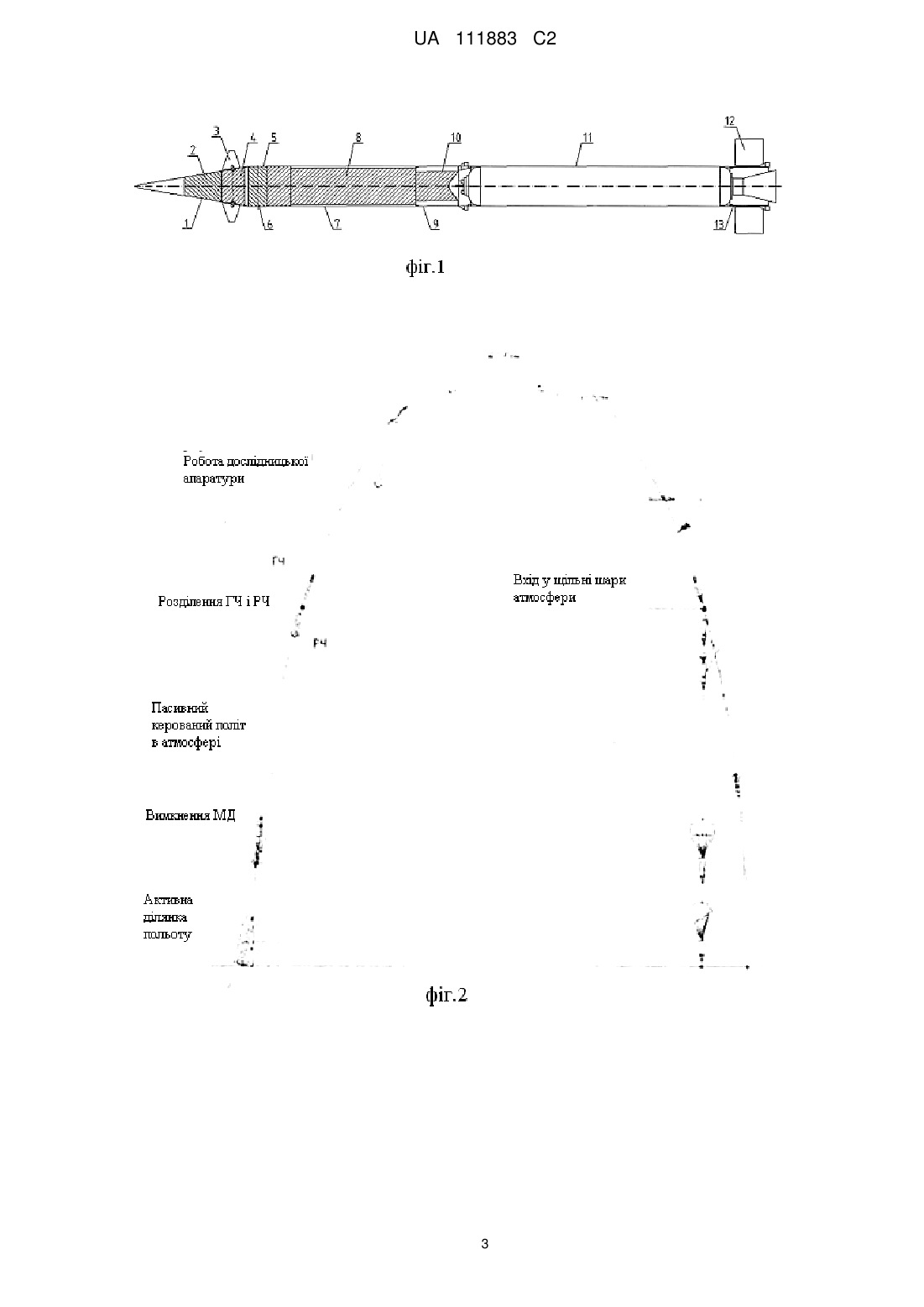
Реферат: Винахід належить до ракетної техніки, а саме до метеорологічних ракет (МР). У даному винаході забезпечуються оптимальні умови для роботи науково-дослідницької апаратури, мінімальний вплив зовнішніх збурень на дослідницьку апаратуру та головну частину у цілому та підвищення точності виведення головної частини у апогей траєкторії, а також зменшення радіуса зони розсіювання падіння головної частини за рахунок встановлення у носовій частині з аеродинамічними рулями газодинамічної двигунної установки системи демпфування, орієнтації та стабілізації та їх сумісної роботи. UA 111883 C2 (12) UA 111883 C2 UA 111883 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до ракетної техніки, а саме до метеорологічних ракет (МР). Як аналоги розглянуті найбільш сучасні ракетні комплекси метеорологічного призначення: МР-30 (РФ), REXUS (Швеція) і Terrier-Oriole (США). Стабілізація на позаатмосферній ділянці ракет комплексів REXUS і Terrier-Oriole за рахунок хвостових стабілізаторів, а на МР-30 також за допомогою АДР, розташованих у носовій частині. Найбільш близьким до заявленого є Шведська метеорологічна ракета (МР) REXUS (REXUS User Manual, Version 7.7, September 2012, EuroLaunch). Конструктивно ракета REXUS складається з ракетної частини (РЧ) та головної частини (ГЧ), що відділяється. У склад ракетної частини входить твердопаливний маршовий двигун та хвостовий відсік з чотириконсольним стабілізатором. У склад головної частини входить перехідний відсік з розташованою у ньому парашутною системою спасіння, приладовий відсік та відсік корисного вантажу. При польоті у щільних шарах атмосфери на висхідній гільці траєкторії підтримання первинної орієнтації повздовжньої осі ракети, заданої кутом нахилу до горизонту стріли пускової установки, і текуча стабілізація ракети відносно її центра мас відбувається шляхом обертання МР навколо повздовжньої осі. Після виходу МР з щільних шарів атмосфери відбувається відокремлення головної частини. ГЧ виконує некерований політ по балістичній траєкторії до задіяння парашутної системи спасіння (розкриття рятівного парашута). Недоліками аналогів і прототипу є: - вільна орієнтація ГЧ на позаатмосферній ділянці польоту, що не дозволяє забезпечити оптимальні умови для роботи дослідницької апаратури; - значний динамічний вплив на дослідницьку апаратуру на момент входу в щільні шари атмосфери через вільну орієнтацію ГЧ; - великий радіус зони розсіювання при падінні ГЧ через вільну орієнтацію ГЧ у момент входу у щільні шари атмосфери. Задача винаходу: - забезпечити оптимальні умови для роботи науково-дослідницької апаратури при проведенні метеорологічних вимірювань за рахунок забезпечення заданої орієнтації ГЧ на позаатмосферній ділянці польоту за допомогою розміщення у носовій частині ГЧ газодинамічної двигунної установки системи демпфування, орієнтації і стабілізації (ДУ СДОС); - забезпечити мінімальний динамічний вплив на дослідницьку апаратуру та рятівну головну частину у цілому за рахунок зниження факторів збурення роботою аеродинамічних рулів (АДР) та ДУ СДОС; - підвищити точність виведення ГЧ у апогей траєкторії, а також мінімізувати радіус зони розсіювання при падінні ГЧ за рахунок підвищення керованості і забезпечення заданої орієнтації ГЧ сумісною роботою ДУ СДОС та АДР. Таким чином, до суттєвих відмінностей можна віднести: - розміщення у носовій частині ГЧ газодинамічної ДУ СДОС, що дозволяє забезпечити стабілізацію польоту і задану орієнтацію ГЧ на позаатмосферній ділянці, а також виконати програмний розворот ГЧ перед входом у щільні шари атмосфери; - розміщення у носовій частині ГЧ ДУ СДОС з встановленими АДР, які забезпечують керованість на ділянці польоту у щільних шарах атмосфери та демпфування збурень при вході у щільні шари атмосфери на спадаючій ділянці траєкторії. Сукупність відомих суттєвих відзнак та нових відмінних відзнак дозволяє забезпечити рішення поставленої задачі. Для пояснення роботи метеорологічної ракети (МР) приведені креслення, на яких зображені: Фіг.1 Компонувальна схема МР, де: 1 - агрегатний відсік; 2 - ДУ СДОС; 3 - аеродинамічні рулі; 4 - приводи аеродинамічних рулів; 5 - приладовий відсік; 6 - система керування; 7 - відсік корисного вантажу; 8 - науково-дослідницька апаратура; 9 - перехідний відсік; 10 - система спасіння; 11 - маршовий двигун; 12 - консоль аеродинамічного стабілізатора; 13 - хвостовий відсік; фіг.2 Схема польоту метеорологічної ракети. Політ МР відбувається по наступній схемі: активна ділянка польоту ракети - ділянка польоту з додатним прискоренням ракети. За часом він співпадає з тривалістю роботи маршового двигуна (11) і складається з двох стадій - некерованої - рух по напрямних, та керованої - політ МР після сходу з напрямних. Первинна орієнтація повздовжньої осі ракети задається кутом нахилу до горизонту напрямних. Початкова динамічна стійкість ракети відносно центра мас забезпечується за допомогою АДР (3). Після сходу ракети з напрямних починається керована стадія активної ділянки траєкторії польоту ракети. 1 UA 111883 C2 5 10 15 20 25 30 35 40 Первинна орієнтація повздовжньої осі ракети і текуча стабілізація ракети відносно її центра мас виконується шляхом подачі команд від системи керування (6), розташованої у приладовому відсіку (5), на рульові приводи АДР (4). Пасивна ділянка польоту ракети - це ділянка польоту ракети і головної частини з від'ємним або нульовим прискоренням. Починається пасивна ділянка з моменту припинення роботи маршового двигуна і продовжується до приземлення ГЧ. Складається пасивна ділянка з наступних стадій: - керований політ ракети у атмосфері; - керований політ ГЧ поза і при вході у атмосферу при задіянні парашуту (режим демпфування коливань); - некерований політ головної частини з парашутом. Після припинення роботи маршового двигуна ракета продовжує керований політ по інерції з номінальними програмними нульовими кутами атаки. При цьому повздовжня вісь ракети орієнтується по вектору швидкості за допомогою АДР (3), що керуються за командами системи керування (6) з урахуванням забезпечення аеродинамічної стійкості чотириконсольним стабілізаторм (12), розташованим на хвостовому відсіку ракети (13). На пасивній ділянці польоту ракети (у складі ГЧ та РЧ з відпрацьованим маршовим двигуном) приводиться у робочий стан дослідницька апаратура (8), що розташована у відсіку корисного вантажу (7). Відділення ГЧ від РЧ виконується після зменшення швидкісного напору до величини, при якій збурюючи аеродинамічні сили і моменти, що діють на ГЧ, стануть сумірні з наявними керуючими силами і моментами, які створюються соплами ДУ СДОС (2), тобто буде можливим автономний керований політ ГЧ. Після відділення ГЧ починається позаатмосферний керований пасивний політ ГЧ, на якому керування польотом здійснюється шляхом подачі команд від системи керування (6) на електропневмоклапани сопел ДУ СДОС (2), яка розташована у носовій частині ГЧ. Після досягнення апогею траєкторії починається рух до землі. У процесі керованого пасивного польоту ГЧ перед входом у щільні шари атмосфери за допомогою сопел ДУ СДОС (2) виконується поворот ГЧ, який забезпечує орієнтацію повздовжньої осі ГЧ уздовж вектора швидкості носовою частиною до землі. На перехідній ділянці у міру зростання швидкісного напору зростають збурюючи аеродинамічні сили та моменти. Для парирування цих збурень величин тяги ДУ СДОС (2) становить замало/тому поточна стабілізація ГЧ здійснюється шляхом сумісної роботи ДУ СДОС та АДР. Сумісна робота ДУ СДОС та АДР у процесі польоту забезпечує більш точний вхід у некерований спуск, що зменшує радіус зони падіння ГЧ. Після входу у щільні шари атмосфери подається команда від СК на систему спасіння (10), розташовану у перехідному відсіку (9), і починається некерований спуск з наступною посадкою ГЧ із заданою швидкістю. Досягнутий новий технічний результат полягає в забезпеченні оптимальних умов роботи науково-дослідницької апаратури; зниженні динамічного впливу на дослідницьку апаратуру та рятувану ГЧ; підвищення точності виведення ГЧ у апогей траєкторії та зменшення радіуса зони розсіювання падіння ГЧ за рахунок установки у носовій частині ГЧ газодинамічної двигунної установки системи демпфування, орієнтації і стабілізації (ДУ СДОС) та аеродинамічних рулів (АДР) та їх сумісної роботи. 45 ФОРМУЛА ВИНАХОДУ 50 Ракета для метеорологічних досліджень, яка складається з ракетної частини з маршовим двигуном і хвостовим відсіком і чотириконсольним стабілізатором та головної частини, що відділяється, яка відрізняється тим, що у носовій частині головної частини з аеродинамічними рулями додатково розташована газодинамічна двигунна установка системи демпфування, орієнтації та стабілізації. 2 UA 111883 C2 3
ДивитисяДодаткова інформація
Автори англійськоюAksionenko Oleksandr Volodymyrovych, Morozov Anatolii Serhiiovych, Hurskyi Oleksandr Ivanovych, Khvorostovskyi Anatolii Volodymyrovych
Автори російськоюАксененко Александр Владимирович, Морозов Анатолий Сергеевич, Гурский Александр Иванович, Хворостовский Анатолий Владимирович
МПК / Мітки
МПК: F42B 15/08
Мітки: метеорологічних, досліджень, ракета
Код посилання
<a href="https://ua.patents.su/5-111883-raketa-dlya-meteorologichnikh-doslidzhen.html" target="_blank" rel="follow" title="База патентів України">Ракета для метеорологічних досліджень</a>
Одноступенева ракета
Номер патенту: 80015
Опубліковано: 10.08.2007
Автори: Тітова Надія Петрівна, Тітов Андрій Володимирович, Тітов Володимир Миколайович
МПК: F42B 15/00
Мітки: одноступенева, ракета
Формула / Реферат:
1. Одноступенева ракета, що містить відсік корисного вантажу, відсік керування польотом ракети та відсіки іншого призначення, які розташовані послідовно вздовж осі ракети, яка відрізняється тим, що на вказані відсіки/відсік встановлений один додатковий незамкнений зсередини циліндричний корпус ракетного двигуна твердого палива, який має один або більше соплові апарати та охоплює відсік корисного вантажу по зовнішній поверхні, при цьому він...
Вакуумно-лазерна ракета
Номер патенту: 106008
Опубліковано: 11.04.2016
Автор: Гончарик Юрій Ігорович
МПК: A62C 3/00, F42B 15/00
Мітки: вакуумно-лазерна, ракета
Формула / Реферат:
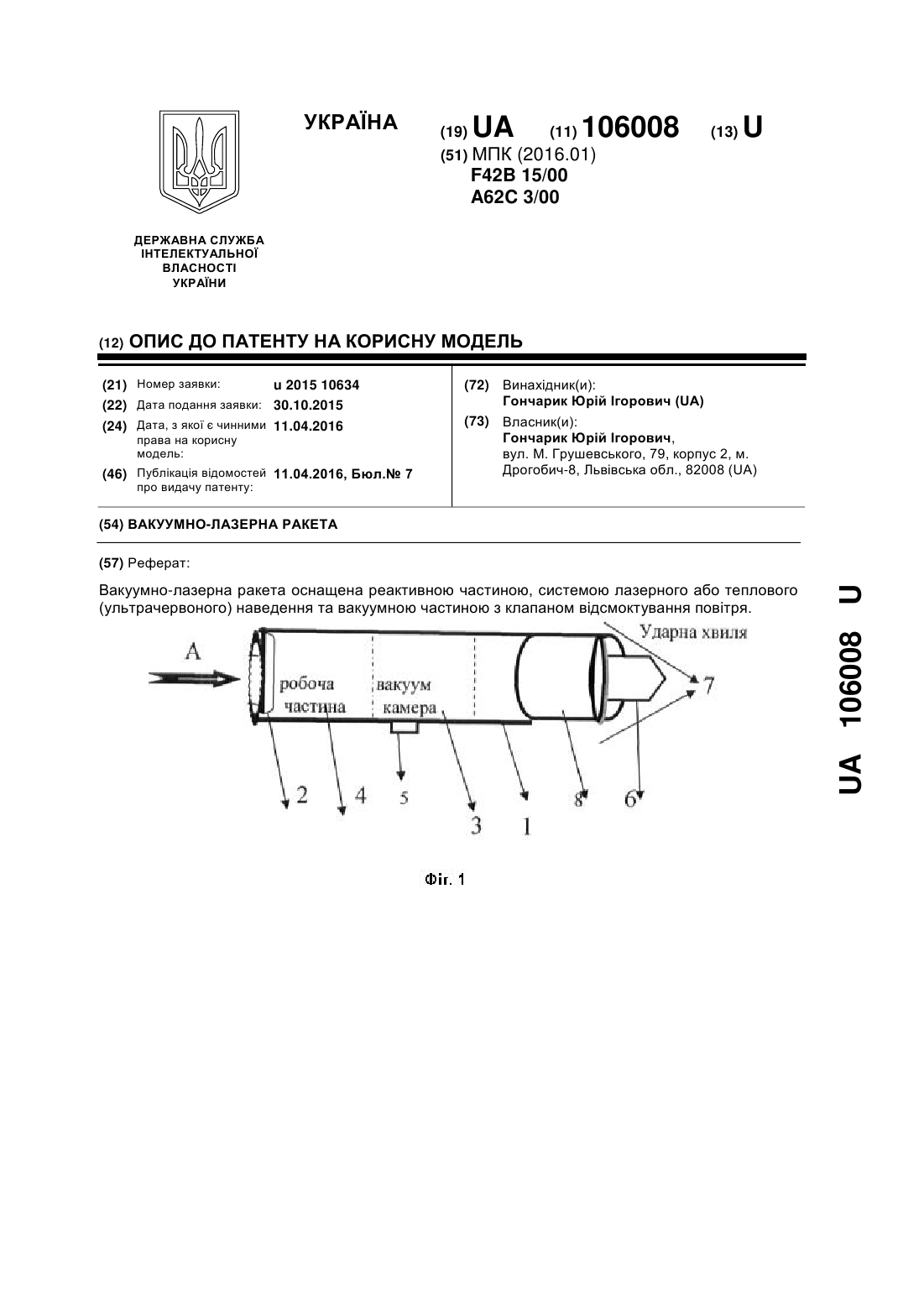
1. Вакуумно-лазерна ракета, яка оснащена реактивною частиною, системою лазерного або теплового (ультрачервоного) наведення, яка відрізняється тим, що вона оснащена вакуумною частиною з клапаном відсмоктування повітря.2. Вакуумно-лазерна ракета за п. 1, яка відрізняється тим, що корпус виконаний із металу-сталі.
Спосіб пуску ракети та ракета для здійснення способу
Номер патенту: 46652
Опубліковано: 15.05.2002
Автори: Нежований Євген Петрович, Агарков Анатолій Васильович, Федоров Володимир Миколайович, Мокін Олександр Васильович
МПК: B64G 1/00
Мітки: ракета, спосіб, пуску, ракети, здійснення, способу
Формула / Реферат:
1. Спосіб пуску ракети, що включає встановлення ракети на пусковий стіл, подавання інертного стисненого газу у заправну магістраль ракети від наземної системи газопостачання до запускання двигуна ракети, сполучення джерела інертного стисненого газу з ємністю з вогнегасильним складом, подавання вогнегасильного складу через сопла-розпилювачі у внутрішню порожнину хвостового відсіку з двигуном та його агрегатами, запускання двигуна ракети і її...
Багатоступінчаста ракета легкого класу для пуску з пускової установки ракети середнього класу

Номер патенту: 4530
Опубліковано: 17.01.2005
Автори: Мокін Андрій Олександрович, Мокін Олександр Васильович, СЕМЕНКОВА ІРИНА ЄФИМІВНА, КОЧЕРГА НАТАЛКА ОЛЕКСІЇВНА, ШРАМОВ ЄВГЕН СЕРГІЙОВИЧ, Єрис Євген Дмитрович
МПК: B64G 1/00, F42B 15/00
Мітки: легкого, середнього, пускової, ракета, багатоступінчаста, класу, пуску, установки, ракети
Формула / Реферат:
1. Багатоступінчаста ракета легкого класу для пуску з пускової установки ракети середнього класу, що містить хвостовий відсік першого ступеня з опорними елементами для кріплення на установнику, відсік приладів верхнього ступеня з бортовою платою електричних рознімань та технологічний відсік з пірозамками кріплення до хвостового відсіку першого ступеня, заправними горловинами, заправними магістралями і опорними вузлами для встановлення на...
Ракета протиторпедна
Номер патенту: 53701
Опубліковано: 11.10.2010
Автор: ЗАБОРА ВОЛОДИМИР МИКИТОВИЧ
МПК: F42B 15/00
Мітки: протиторпедна, ракета
Формула / Реферат:
1. Ракета протиторпедна, що складається з металевого циліндра, в якому розміщені ракетний твердопаливний двигун, балон з стисненим повітрям, повітряна турбіна, шумові колеса, блок підривників, система контактного і дистанційного підриву, джерело електроенергії і вибухова речовина, яка відрізняється тим, що шумові колеса розміщені між турбіною і вибуховим зарядом, а ракета своїм випромінюванням тепла від корпусу відпрацьованого двигуна і...
Попередній патент: Вагон метрополітену із зовнішньою стрічкою безпеки
Наступний патент: Засіб для схуднення на рослинній основі “modeline”
Випадковий патент: Тверда шлакоутворювальна суміш