Спосіб живлення адаптивних гідравлічних опор
Номер патенту: 113043
Опубліковано: 10.01.2017
Автори: Космач Олександр Павлович, Сапон Сергій Петрович, Федориненко Дмитро Юрійович, Цеков Богдан Володимирович

Формула / Реферат
Спосіб живлення адаптивних гідравлічних опор, що передбачає живлення гідравлічних підшипників в гідростатичному або гідродинамічному режимах мащення, а також в режимі холостого ходу обладнання через регульовані клапани витрат рідини, пропускна здатність яких безступінчасто регулюється мікропроцесором залежно від частоти обертання ротора та режимів мащення опори, при цьому живлення підшипника в гідродинамічному режимі мащення, а також в режимі холостого ходу обладнання забезпечується гідроакумулятором з періодичним наповненням насосною установкою у разі зменшення тиску робочої рідини в системі живлення до попередньо встановленого значення, який відрізняється тим, що в гідростатичному режимі мащення підшипник живлять виключно насосною установкою, необхідну продуктивність якої задають частотним регулюванням вхідного струму електродвигуна, залежно від тиску робочої рідини в напірній магістралі системи живлення.
Текст
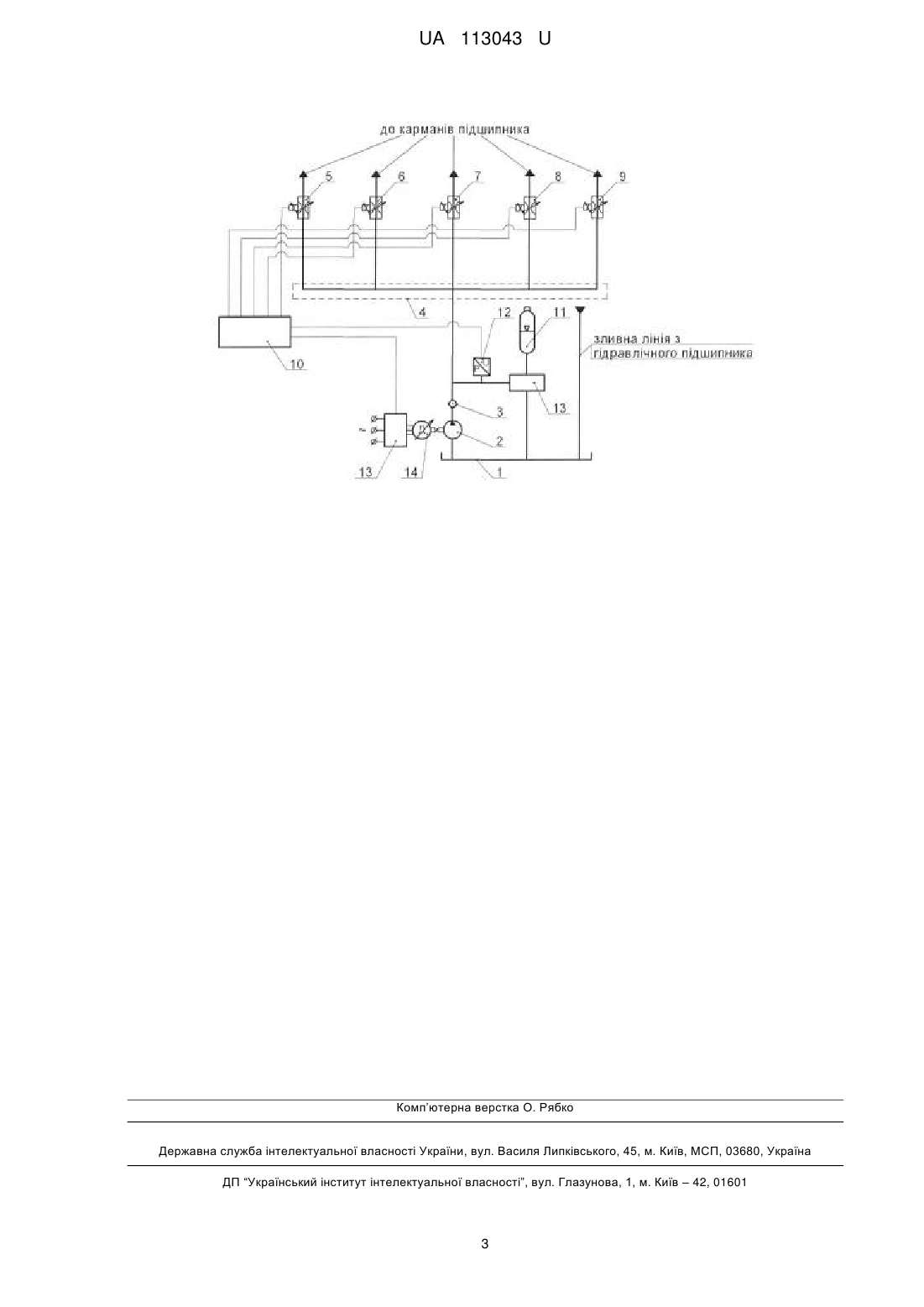
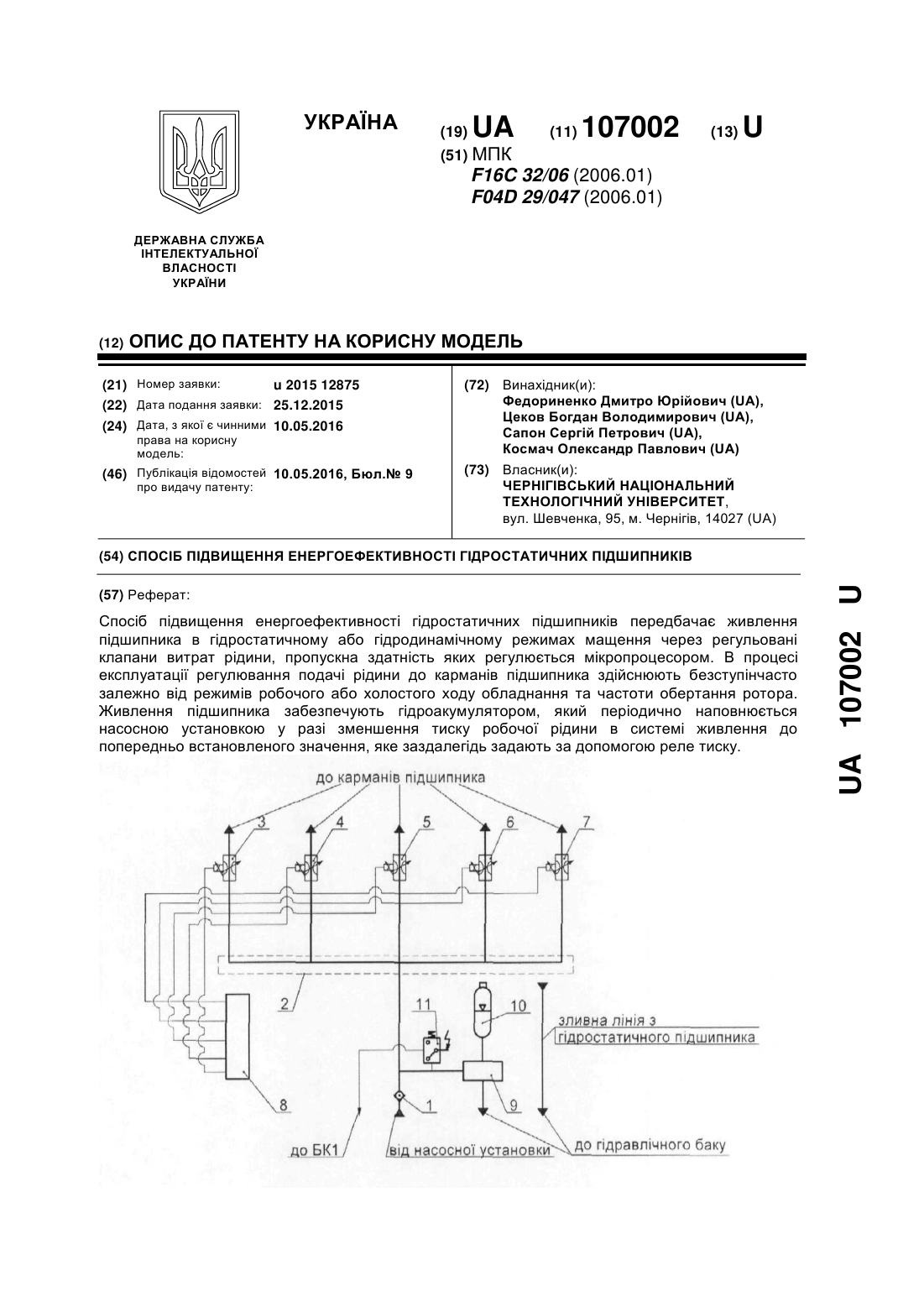
Реферат: Спосіб живлення адаптивних гідравлічних опор передбачає живлення гідравлічних підшипників в гідростатичному або гідродинамічному режимах мащення, а також в режимі холостого ходу обладнання через регульовані клапани витрат рідини, пропускна здатність яких безступінчасто регулюється мікропроцесором залежно від частоти обертання ротора та режимів мащення опори, при цьому живлення підшипника в гідродинамічному режимі мащення, а також в режимі холостого ходу обладнання забезпечується гідроакумулятором з періодичним наповненням насосною установкою у разі зменшення тиску робочої рідини в системі живлення до попередньо встановленого значення. В гідростатичному режимі мащення підшипник живлять виключно насосною установкою, необхідну продуктивність якої задають частотним регулюванням вхідного струму електродвигуна, залежно від тиску робочої рідини в напірній магістралі системи живлення. UA 113043 U (54) СПОСІБ ЖИВЛЕННЯ АДАПТИВНИХ ГІДРАВЛІЧНИХ ОПОР UA 113043 U UA 113043 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування, а саме до гідравлічних опор обертових вузлів технологічного обладнання. Відомий спосіб живлення адаптивних гідравлічних опор [Пат. 89288 UA, МПК F16C 32/06. Регульований радіальний гідростатодинамічний підшипник / Федориненко Д.Ю., Сапон С.П., Хабібуліна A.M.; заявник і патентовласник Чернігівський національний технологічний університет. - № u201314341; заявл. 09.12.2013; опубл. 10.04.2013, Бюл. № 7.], що включає живлення підшипника в гідростатичному або гідродинамічному режимах мащення через регульовані клапани витрат рідини, пропускна здатність яких регулюється мікропроцесором залежно від частоти обертання ротора, що вимірюється енкодером, сигнал з якого подається до регулятора через аналого-цифровий перетворювач. Недоліком такого способу живлення є значні енерговитрати для обох режимів мащення, внаслідок роботи насосної установки в режимі постійного тиску, в результаті чого частина робочої рідини зливається до бака, не виконуючи корисної роботи. До недоліків системи живлення слід також віднести недостатню надійність експлуатації, оскільки у випадку аварійної відмови насосної установки живлення підшипника припиняється, що призводить до ушкоджень опорних поверхонь підшипника. Як прототип прийнята система живлення гідростатичних підшипників [Пат. 107002 UA, МПК F16C 32/06, F04D 29/047 Спосіб підвищення енергоефективності гідростатичних підшипників/ Федориненко Д.Ю., Цеков Б.В., Сапон С.П., Космач О.П.; заявник і патентовласник Чернігівський національний технологічний університет. - № u201512875; заявл. 25.12.2015; опубл. 10.05.2016, Бюл. № 9.] Недоліком даного способу живлення є постійна зміна тиску в результаті періодичного живлення опори гідроакумулятором, що суттєво впливає на витратні характеристики опори та призводить до нерівномірності показників жорсткості під час експлуатації опори в гідростатичному режимі мащення. До недоліків також слід віднести релейне керування подачі рідини насосом, яке супроводжується піковими стрибками напруги та перехідними гідравлічними процесами, що в сукупності зменшують ресурс роботи гідро- та електроапаратури. В основу корисної моделі поставлена задача удосконалення системи живлення адаптивного гідравлічного підшипника з метою підвищення його жорсткості та енергоефективності у гідростатичному режимі мащення. Підвищення енергоефективності забезпечується заміною релейного керування подачі робочої рідини насосом на частотне шляхом використання перетворювача частоти вхідного струму привідного асинхронного електродвигуна насоса, що дозволяє безступінчасто змінювати його частоту обертання і як наслідок витратну характеристику насосного агрегату. Запрограмований мікропроцесором частотний перетворювач забезпечує плавний пуск і зупинку привідного електродвигуна насоса. Це забезпечує запуск електродвигуна при струмах, обмежених рівнем номінального значення, що підвищує довговічність електродвигуна та знижує вимоги до потужності мережі живлення та потужності комутуючої апаратури. Підвищення жорсткості опори забезпечується стабілізацією тиску робочої рідини в напірній магістралі при гідростатичному режимі мащення за рахунок постійного живлення опори насосною установкою на базі частотного перетворювача, що має зворотній зв'язок з давачем тиску в напірній магістралі та забезпечує необхідну продуктивність насосного агрегату, залежно від пропускної здатності регульованих клапанів витрат та ємності робочої рідини в гідроакумуляторі. Гідроакумулятор в даному випадку використовується для згладження пульсацій тиску робочої рідини та її накопичення для живлення опори в гідродинамічному режимі мащення та в режимі холостого ходу обладнання. Запропонований основний контур регулювання продуктивності насосної станції дозволяє суттєво зменшити об'єм гідроакумулятора та скоротити промислові площі для устаткування. Система живлення має додатковий контур керування (адаптації) з колом зворотного зв'язку за частотою обертання ротора. Це дозволяє гнучко змінювати структуру системи живлення опори для підбору найбільш ефективного режиму мащення з метою підвищення енергоефективності об'ємного гідроприводу в цілому. Суть способу живлення адаптивних гідравлічних опор пояснює принципова схема живлення гідростатичного підшипника. Робоча рідина з бака 1 подається насосом 2 по напірній магістралі через зворотній клапан 3 до гідроакумулятора та розподілювача потоку рідини 4, після чого магістраль розгалужується на необхідну кількість гілок живлення до кожного із загальної кількості до карманів гідравлічного підшипника (на схемі показано як приклад схему живлення для підшипника з п'ятьма 1 UA 113043 U 5 10 15 20 25 30 35 40 карманами). З карманів підшипника робоча рідина надходить в зливний картер (на схемі не зображено), після чого через зливну лінію повертається до бака. В кожній гілці живлення карманів є регульовані пропорційні клапани витрат рідини 5-9, що попередньо налагоджені на мінімально необхідну пропускну здатність. Залежно від режимів робочого або холостого ходу обладнання та частоти обертання ротора мікропроцесорний блок керування 10 за програмою визначає необхідну витрату мастила у кармани підшипника та надсилає сигнал до регульованих клапанів витрат рідини 5-9, які безступінчасто змінюють свою пропускну здатність пропорційно до вхідного сигналу. Живлення підшипника в гідродинамічному режимі мащення, а також в режимі холостого ходу обладнання здійснюється гідроакумулятором 11, через регульовані пропорційні клапани витрат рідини, насосна установка при цьому вимкнута. Давач тиску 12, що встановлений в напірній магістралі, подає сигнал до мікропроцесорного блока керування 10, що керує частотним перетворювачем 13, який при зниженні тиску, у системі живлення до деякого заздалегідь, встановленого критичного значення починає плавно збільшувати частоту вхідного струму електродвигуна 14, тим самим забезпечуючи плавне вмикання насосної установки для одночасного живлення підшипника та наповнення ємності гідроакумулятора до необхідного значення тиску. Для підвищення надійності роботи гідроакумулятора призначений розвантажувальний блок 15, який у разі критичного підвищення тиску в гідроакумуляторі переливає надлишок рідини до бака. При роботі підшипника в гідростатичному режимі мащення пропускна здатність регульованих клапанів витрат рідини програмно змінюються залежно від частоти обертання ротора, що задається основним регулятором, реалізованим у мікропроцесорному блоці керування 10. Живлення підшипника в гідростатичному режимі мащення забезпечується насосною установкою з частотним перетворювачем 13, який забезпечує необхідну продуктивність насосного агрегату пропорційно до вхідного сигналу давача тиску 12, що встановлений в напірній магістралі забезпечуючи при цьому необхідне заздалегідь визначене значення тиску. При перевищені швидкості обертання ротора деякого граничного значення, що задається адаптивним регулятором, мікропроцесорний блок керування 10 припиняє подачу робочої рідини до програмно заданої кількості n карманів підшипника шляхом перекривання відповідних пропорційних клапанів витрат рідини. При цьому мащення підшипника здійснюється у гідродинамічному режимі. З метою охолодження підшипника при роботі на високих швидкостях ковзання робоча рідина надходить до (k-n) карманів підшипника. При зменшенні швидкості обертання ротора нижче попередньо встановленого граничного значення мікропроцесорний блок керування 10 шляхом регулювання клапанами 5-9 відновлює подачу робочої рідини до всіх карманів підшипника. Система переходить до гідростатичного режиму мащення. Під час роботи технологічного обладнання на холостому ході, подача робочої рідини до k карманів підшипника зменшується до мінімального значення, що забезпечується шляхом регулювання пропускної здатності пропорційних клапанів витрат мікропроцесорним блоком керування 10. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Спосіб живлення адаптивних гідравлічних опор, що передбачає живлення гідравлічних підшипників в гідростатичному або гідродинамічному режимах мащення, а також в режимі холостого ходу обладнання через регульовані клапани витрат рідини, пропускна здатність яких безступінчасто регулюється мікропроцесором залежно від частоти обертання ротора та режимів мащення опори, при цьому живлення підшипника в гідродинамічному режимі мащення, а також в режимі холостого ходу обладнання забезпечується гідроакумулятором з періодичним наповненням насосною установкою у разі зменшення тиску робочої рідини в системі живлення до попередньо встановленого значення, який відрізняється тим, що в гідростатичному режимі мащення підшипник живлять виключно насосною установкою, необхідну продуктивність якої задають частотним регулюванням вхідного струму електродвигуна, залежно від тиску робочої рідини в напірній магістралі системи живлення. 2 UA 113043 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16C 33/10, F16C 32/06
Мітки: гідравлічних, спосіб, адаптивних, живлення, опор
Код посилання
<a href="https://ua.patents.su/5-113043-sposib-zhivlennya-adaptivnikh-gidravlichnikh-opor.html" target="_blank" rel="follow" title="База патентів України">Спосіб живлення адаптивних гідравлічних опор</a>
Спосіб підвищення енергоефективності гідростатичних підшипників
Номер патенту: 107002
Опубліковано: 10.05.2016
Автори: Цеков Богдан Володимирович, Федориненко Дмитро Юрійович, Сапон Сергій Петрович, Космач Олександр Павлович
МПК: F16C 32/06, F04D 29/047
Мітки: спосіб, підвищення, гідростатичних, енергоефективності, підшипників
Формула / Реферат:
Спосіб підвищення енергоефективності гідростатичних підшипників, який передбачає живлення підшипника в гідростатичному або гідродинамічному режимах мащення через регульовані клапани витрат рідини, пропускна здатність яких регулюється мікропроцесором, який відрізняється тим, що в процесі експлуатації регулювання подачі рідини до карманів підшипника здійснюють безступінчасто залежно від режимів робочого або холостого ходу обладнання та частоти...
Застосування щілинних ущільнень у відцентровому насосі як радіальних гідравлічних опор

Номер патенту: 87807
Опубліковано: 25.02.2014
Автори: Гулий Олександр Миколайович, Кобизська Анастасія Олександрівна
МПК: F04D 29/08
Мітки: застосування, радіальних, опор, насоси, відцентровому, гідравлічних, ущільнень, щілинних
Формула / Реферат:
Застосування щілинних ущільнень у відцентровому насосі як радіальних гідравлічних опор.
Спосіб здійснення прискореної декомпресії робочих циліндрів потужних ковальських гідравлічних пресів
Номер патенту: 107949
Опубліковано: 24.06.2016
Автор: Корчак Олена Сергіївна
МПК: B30B 15/00
Мітки: циліндрів, робочих, ковальських, спосіб, потужних, декомпресії, пресів, здійснення, прискореної, гідравлічних
Формула / Реферат:
Спосіб здійснення прискореної декомпресії робочих циліндрів потужних ковальських гідравлічних пресів, що полягає у дроселюванні робочої рідини зливними клапанами, відкриванні наповнювально-зливних клапанів після падіння тиску у робочих циліндрах до припустимого значення та скиданні тиску із робочих циліндрів до рівня тиску у наповнювально-зливному баку через основний трубопровід низького тиску, який відрізняється тим, що перед дроселюванням...
Спосіб розвантаження робочих циліндрів гідравлічних пресів від тиску
Номер патенту: 20181
Опубліковано: 15.01.2007
Автори: Шинкаренко Олег Михайлович, Корчак Олена Сергіївна
МПК: B21J 9/00
Мітки: гідравлічних, тиску, пресів, спосіб, циліндрів, робочих, розвантаження
Формула / Реферат:
Спосіб розвантаження робочих циліндрів гідравлічних пресів від тиску, що включає дроселювання робочої рідини зливним клапаном, який відрізняється тим, що здійснюють відкриття наповнювально-зливного клапана одразу ж після робочого ходу преса, тобто при високому тиску в робочих циліндрах, а конструктивна характеристика наповнювально-зливного клапана має мінімальне значення 1,0, коефіцієнт якості гідросистеми - не нижче 0,7, час відкриття...
Регулятор жорсткості гідростатичних опор
Номер патенту: 109810
Опубліковано: 12.10.2015
Автори: Шевченко Ярослав Володимирович, Сахно Євгеній Юрійович
МПК: F16C 32/06
Мітки: гідростатичних, регулятор, жорсткості, опор
Формула / Реферат:
Регулятор жорсткості гідростатичної опори (ГСО), який містить основну систему живлення карманів гідростатичної опори та додаткову систему живлення, електромагнітний датчик, який взаємодіє з кільцем з феромагнітними вставками, жорстко закріпленим на валу, керуючий розподільник для подачі робочої рідини в канали ГСО, який відрізняється тим, регулятор містить щонайменше один додатковий електромагнітний датчик, який встановлено з можливістю...
Попередній патент: Склад порошкової суміші для послідовного хромотитанування металевих виробів
Наступний патент: Спосіб лікування ідіопатичного сколіозу і-іі ступенів
Випадковий патент: Спосіб лікування хронічних токсичних гепатитів