Спосіб контролю експлуатаційних режимів роботи машинно-тракторних агрегатів
Номер патенту: 113681
Опубліковано: 10.02.2017
Автори: Лебедєв Анатолій Тихонович, Артьомов Микола Прокопович, Подригало Михайло Абович, Мальцев Валентин Петрович, Шуляк Михайло Леонідович
Формула / Реферат
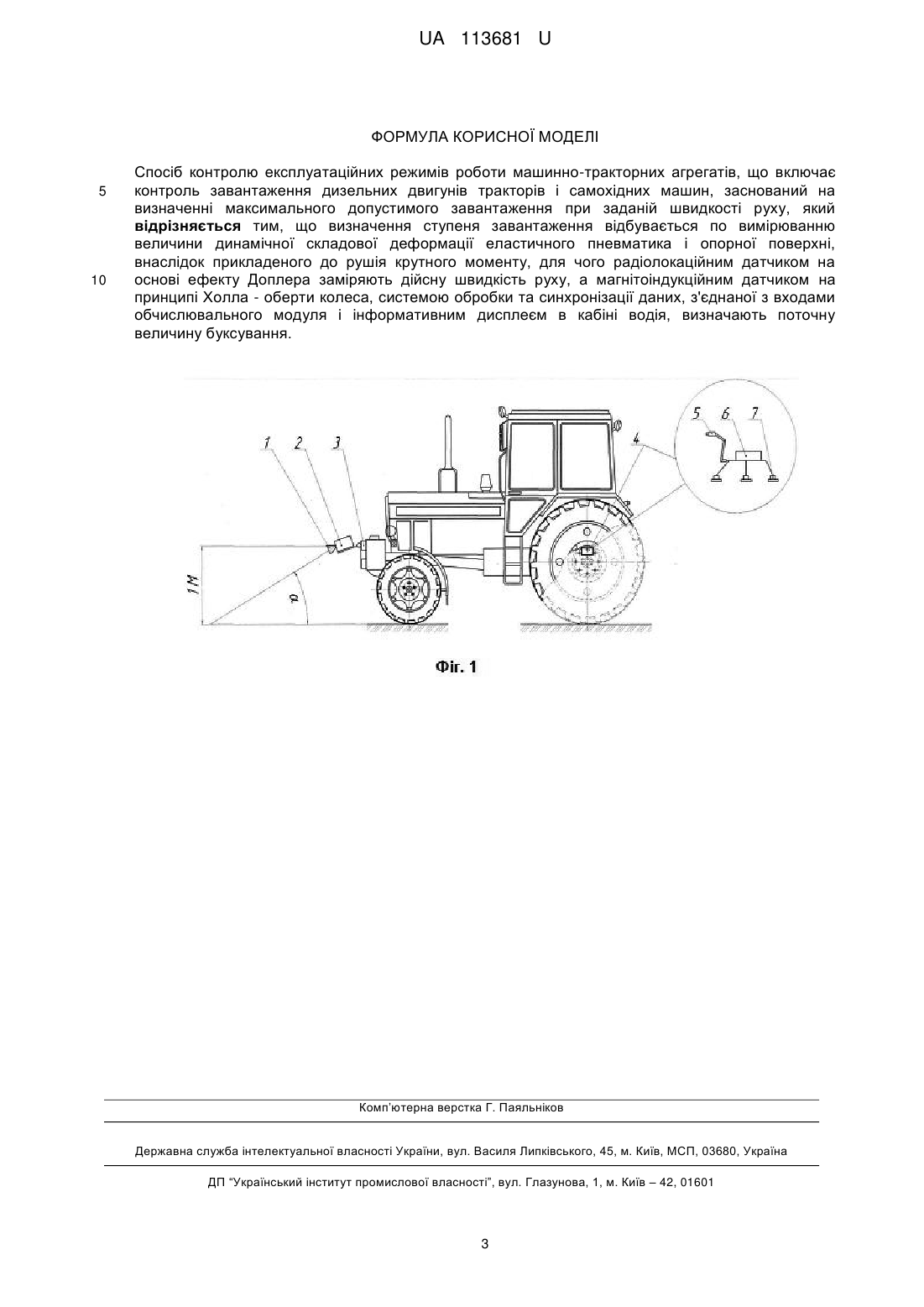
Спосіб контролю експлуатаційних режимів роботи машинно-тракторних агрегатів, що включає контроль завантаження дизельних двигунів тракторів і самохідних машин, заснований на визначенні максимального допустимого завантаження при заданій швидкості руху, який відрізняється тим, що визначення ступеня завантаження відбувається по вимірюванню величини динамічної складової деформації еластичного пневматика і опорної поверхні, внаслідок прикладеного до рушія крутного моменту, для чого радіолокаційним датчиком на основі ефекту Доплера заміряють дійсну швидкість руху, а магнітоіндукційним датчиком на принципі Холла - оберти колеса, системою обробки та синхронізації даних, з'єднаної з входами обчислювального модуля і інформативним дисплеєм в кабіні водія, визначають поточну величину буксування.
Текст
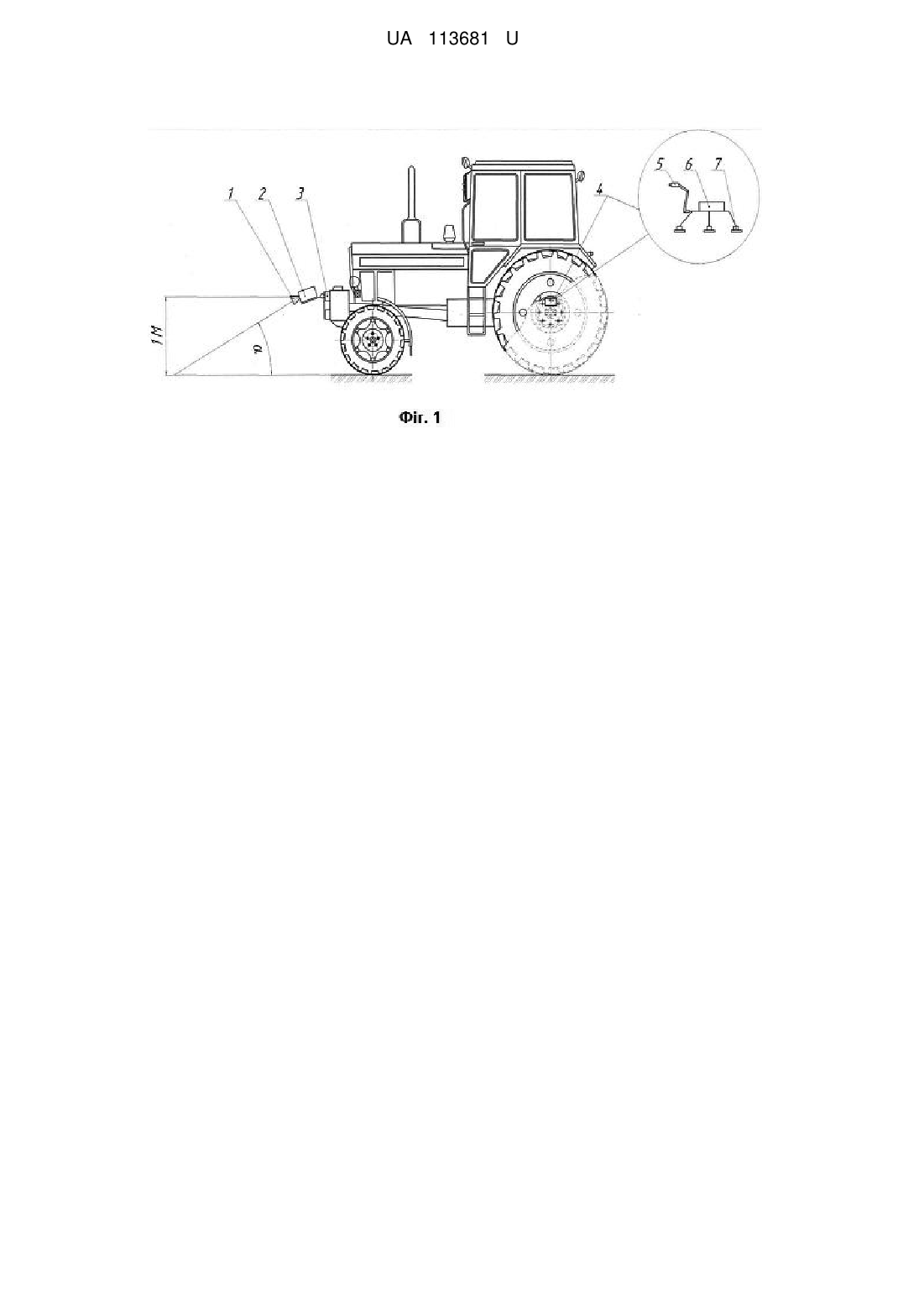
Реферат: Спосіб контролю експлуатаційних режимів роботи машинно-тракторних агрегатів включає контроль завантаження дизельних двигунів тракторів і самохідних машин, заснований на визначенні максимального допустимого завантаження при заданій швидкості руху. Визначення ступеня завантаження відбувається по вимірюванню величини динамічної складової деформації еластичного пневматика і опорної поверхні, внаслідок прикладеного до рушія крутного моменту, для чого радіолокаційним датчиком на основі ефекту Доплера заміряють дійсну швидкість руху, а магнітоіндукційним датчиком на принципі Холла - оберти колеса, системою обробки та синхронізації даних, з'єднаної з входами обчислювального модуля і інформативним дисплеєм в кабіні водія, визначають поточну величину буксування. UA 113681 U (12) UA 113681 U UA 113681 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до механізації сільськогосподарського виробництва, до способів контролю роботи машинно-тракторних агрегатів, зокрема завантаження дизельних двигунів тракторів і самохідних машин. Спосіб може бути використаний при випробуванні або рядовій експлуатації агрегатів. Мобільні машини належить до керованих динамічних систем, на ефективність роботи яких впливають різноманітні фактори, що мають, як правило, випадковий характер. Особливості руху цих систем та відповідність їх своєму функціональному призначенню - це фактори від яких залежать ступінь досконалості мобільних машин. Подальше розширення технологічних можливостей і сфери застосування мобільних машин вимагають поглибленого вивчення процесу функціонування. Динаміка цього процесу, у зв'язку із зазначеними тенденціями, посилюється внаслідок збільшення різноманіття елементів мобільних машині способів їх з'єднання, розширення діапазонів зовнішніх і керуючих впливів, зростання енергонасиченості тракторів [1]. В основу корисної моделі поставлена задача надійний оперативний контроль завантаження двигуна і підбір оптимальних швидкісних і навантажувальних режимів роботи трактора або самохідної машини в польових умовах, що виключає втручання в конструкцію і технологічну операцію. Відомі способи визначення швидкісних і навантажувальних режимів роботи трактора або самохідної машини, засновані на застосуванні пристроїв, які контролюють положення рейки регулятора паливного насоса - а.с. 2030723, кл. G01L 23/22, Амельченко П.А. и др. "Сигнализатор загрузки двигателя", а.с. 2029932, кл. G01L 5/00, 23/22, Родичев В.А., Бурдиян М.П. "Эконометр". Заявлені пристрої складаються з датчика, електронного логічного блока і світлового покажчика. Датчиком є контактна група регулятора паливного насоса, створена регулювальним гвинтом (встановлюється на важелі регулятора замість болта регулювання номінальної подачі палива) і валом важеля керування подачею палива все режимного регулятора частоти обертання. Контактна пара, регулювальний гвинт - вал важеля постійно розімкнути, та замикаються при завантаженні двигуна (по крутному моменту), що відповідає його максимальній потужності на даному швидкісному режимі. Електричний сигнал надходить в логічний блок, там аналізується і покажчик інформує механізатора про досягнення завантаження, близького до максимального, або про перевантаження двигуна. Недоліками даного способу є: - необхідність втручання в конструкцію систем двигуна і подальше періодичне регулювання елементів датчика через електрокорозійний знос контактів; - вузький діапазон завантаження, при якому виробляються сигнали (тільки при роботі двигуна на переході з регуляторної на коректорну галуз швидкісної характеристики); - відсутність оцінки взаємодії рушія з опорною поверхнею (реалізація моменту двигуна обмежена коефіцієнтом зчеплення); - необхідністю обмеження завантаження за екологічними факторами (граничне допустиме значення буксування рушія для різних аграфонов і умов виконання технологічної операції). З метою усунення зазначених недоліків пропонується спосіб визначення завантаження двигуна в широких межах, з можливістю обмеження за екологічними факторами, заснований на моніторингу зміни буксування рушіїв трактора або самохідної машини. Аналіз математичних залежностей для визначення буксування, за умови відомого значення прикладених до рушія сили або крутного моменту, запропонованих Гуськовим А.В., Кацигіним В.В., Шепеленко Г.Н., Самородовим В.Б. [2, 3] дозволяє стверджувати, що сила, прикладена до рушія, задає динамічну складову буксування. Її визначення дозволить оцінити можливості трактора реалізувати потужність двигуна на даному аграфоні. Спосіб контролю експлуатаційних режимів роботи машинно-тракторних агрегатів, зокрема контролю завантаження дизельних двигунів тракторів і самохідних машин, заснований на визначенні максимального допустимого завантаження при заданій швидкості руху, який відрізняється тим, що визначення ступеня завантаження відбувається не щодо положення рейки паливного насоса, а по вимірюванню величини динамічної складової деформації еластичного пневматика і опорної поверхні, внаслідок прикладеного до рушія крутного моменту, для чого радіолокаційним датчиком на основі ефекту Доплера заміряється дійсна швидкість руху, а магнітоіндукційним датчиком на принципі Холла - оберти колеса, системою обробки та синхронізації даних, з'єднаної з входами обчислювального модуля і інформативним дисплеєм в кабіні водія, визначатися поточна величина буксування. Суть корисної моделі пояснює креслення. 1 UA 113681 U Реалізація методу відбувається наступним чином - на трактор (кресл.) в носовій частині під кутом α за допомогою магнітів 3 фіксують радар 2 з антеною 1. Можливість регулювання кута α, дозволяє використовувати радар практично на будь-яких типах агрегатів. Дійсна швидкість руху агрегату визначається на основі простого виразу: 5 Vд K p де 10 15 20 f д сos , 2 - робоча довжина хвилі радара (м); f д - доплеровській зсув частоти (Гц); K p калібрувальний коефіцієнт, що враховує похибку установки кута α, а також похибку вимірювання швидкості руху агрегату за рахунок кінцевої ширини діаграми спрямованості (ДС) антени. Для вимірювання теоретичної швидкості встановлюється датчик на основі ефекту Холла 4 напівпровідниковий елемент 5, якого має здатність змінювати величину вихідного сигналу від змінного магнітного поля, викликаного зміною відстані до металевих деталей, що пересуваються. Для кріплення подібного датчика на транспортних засобах розроблена універсальна конструкція на магнітній тринозі 7, яка забезпечує фіксацію пристрою практично на будь-якому виді агрегатів. Сигнал підсилюється 6 та передається до блока логіки. Передбачена установка датчиків 4 як на один, так і на декількох рушіях трактора залежно від поставлених завдань. Важливою характеристикою датчика також є його інформативна смуга, яка з боку верхніх частот обмежена постійною часу, що становить зазвичай близько 3 мкс, а з боку нижніх частот обмеження відсутні, так як розглянутий сенсор належить до класу позиційних датчиків і реагує на статичне положення. Теоретична швидкість агрегату при використанні розглянутого датчика обчислюється за допомогою наступного виразу: L Vк 3,6 , T де L Dк - довжина кола рушія діаметром D к (м); T - час, за який рушій робить один 25 30 35 40 45 50 оберт, є вимірюваною величиною (с). При цьому довжина кола L уточнюється в процесі калібрування і може здаватися, як вільним радіусом рушія (для визначення повного буксування), так і кінематичним (для визначення динамічної складової буксування). В реальних умовах експлуатації агрегату оптимальний по паливній економності режим встановлюється шляхом перемикання передач трактора і установкою важеля керування подачею палива в таке положення, щоб забезпечувалося максимальне завантаження двигуна, і в той же час швидкість руху агрегату не перевищувала допустиму. В процесі випробувань встановлюється функціональна залежність між величиною крутного моменту і буксуванням. Можливість враховувати характерні умови експлуатації на даному типі агрофона дозволяє обмежити прикладену до рушія силу, виключаючи роботу на режимах, що порушують екологічну складову. Таким чином, запропонований спосіб контролю експлуатаційних режимів роботи машиннотракторних агрегатів дозволяє з високою точністю досліджувати, в режимі реального часу, зміни параметрів роботи мобільних машин і дозволяє вибрати оптимальні режими функціонування. В інших джерелах інформації спосіб контролю експлуатаційних режимів з такими ознаками автори не виявили. Джерела інформації: 1. Рославцев А.В. Средства исследования движения МТА / А.В. Рославцев, В.М. Авдеев, В.М. Третьяк, С.Л. Абдула и др. // Тракторы и сельскохозяйственные машины. - 1999. № 3. - С. 26-29. 2. Ребров А.Ю. Кучков В.В. Анализ аналитических зависимостей для определения коэффициента буксования тракторных шин / А.Ю. Ребров, В.В. Кучков // Вісник НТУ "ХПІ". Збірник наукових праць. Серія: Автомобіле- і тракторобудування. - X.: НТУ "ХПІ". - 2012. - № 64. - С. 22-25. 3. Лебедев А.Т. Опір перекочування колеса, що працює з буксуванням / А.Т. Лебедев, Є.І. Калінін, М.Л. Шуляк // Сільськогосподарські машини: зб. наук, праць ЛНТУ. - Луцьк: ЛНТУ, 2015. - Вип. 32. - С. 109-116. 2 UA 113681 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб контролю експлуатаційних режимів роботи машинно-тракторних агрегатів, що включає контроль завантаження дизельних двигунів тракторів і самохідних машин, заснований на визначенні максимального допустимого завантаження при заданій швидкості руху, який відрізняється тим, що визначення ступеня завантаження відбувається по вимірюванню величини динамічної складової деформації еластичного пневматика і опорної поверхні, внаслідок прикладеного до рушія крутного моменту, для чого радіолокаційним датчиком на основі ефекту Доплера заміряють дійсну швидкість руху, а магнітоіндукційним датчиком на принципі Холла - оберти колеса, системою обробки та синхронізації даних, з'єднаної з входами обчислювального модуля і інформативним дисплеєм в кабіні водія, визначають поточну величину буксування. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: контролю, режимів, спосіб, агрегатів, експлуатаційних, роботи, машинно-тракторних
Код посилання
<a href="https://ua.patents.su/5-113681-sposib-kontrolyu-ekspluatacijjnikh-rezhimiv-roboti-mashinno-traktornikh-agregativ.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю експлуатаційних режимів роботи машинно-тракторних агрегатів</a>
Комбінований вимірювальний комплекс моніторингу буксування і швидкості машинно-тракторних агрегатів
Номер патенту: 109277
Опубліковано: 25.08.2016
Автори: Хлопов Григорій Іванович, Лебедєв Анатолій Тихонович, Коробко Андрій Іванович, Мальцев Валентин Петрович, Лебедєв Сергій Анатолійович, Шуляк Михайло Леонідович
МПК: G01M 15/00, G01M 17/00, G01P 3/00
Мітки: швидкості, моніторингу, буксування, машинно-тракторних, комплекс, вимірювальний, агрегатів, комбінований
Формула / Реферат:
Комбінований вимірювальний комплекс моніторингу буксування і швидкості машинно-тракторних агрегатів, що містить систему збирання і обробляння даних, який відрізняється тим, що складається з контактного задавача на основі ефекту Холла і безконтактного задавача швидкості на основі ефекту Доплера, сигнал яких після синхронізації і обробляння в цифровому блоці виводиться на дисплей в кабіні машинно-тракторного агрегату, обчислювальний блок...
Спосіб визначення і контролю режимів роботи пиловловлювачів
Номер патенту: 63653
Опубліковано: 15.01.2004
Автори: Швидченко Володимир Олександрович, Бантюков Євген Миколайович, Кучмій Євген Антонович, Рудко Василь Петрович, Брода Володимир Дмитрович, Колодяжний Валерій Васильович, Золотарьов Леонід Генріхович
МПК: B01D 46/44, F17D 5/02
Мітки: роботи, контролю, пиловловлювачів, спосіб, визначення, режимів
Формула / Реферат:
Спосіб визначення і контролю режимів роботи пиловловлювачів, що включає вимірювання тиску і витрати газу, який відрізняється тим, що тиск - і витрату - газу вимірюють на спільному вході пиловловлювачів, за величиною тиску газу на вході пиловловлювачів і за паспортними залежностями
Спосіб контролю та регулювання режимів роботи свердловин
Номер патенту: 94980
Опубліковано: 10.12.2014
Автори: Синюк Борис Борисович, Фесенко Юрій Леонідович, Фик Михайло Ілліч, Шендрик Олексій Михайлович, Кривуля Сергій Вікторович, Вахрів Андрій Петрович
МПК: B01D 19/00, E21B 43/34
Мітки: свердловин, контролю, режимів, роботи, спосіб, регулювання
Формула / Реферат:
Спосіб контролю та регулювання режимів роботи свердловин, що підключені до установки підготовки газу, шляхом проведення поточного аналізу дебіту та вологовмісту природного газу і організацією періодичного підключення в роботу окремих свердловин, що підключені за кущовою схемою, в пасивному режимі та з використанням компресорного обладнання, який відрізняється тим, що вимірюють вологість, дебіт та тиск спочатку на технологічних лініях...
Спосіб контролю режимів роботи індукційної канальної печі та стану її каналів
Номер патенту: 110619
Опубліковано: 25.10.2016
Автори: Дубодєлов Віктор Іванович, Моісеєв Юрій Васильович, Слажнєв Микола Андрійович, Богдан Кім Степанович
МПК: G01N 27/90, G01N 27/72
Мітки: роботи, печі, режимів, канальної, контролю, стану, спосіб, індукційної, каналів
Формула / Реферат:
Спосіб контролю режимів роботи індукційної канальної печі та стану її каналів, що включає вимірювання параметрів електромагнітного поля, що індукується у каналі навколо рідкометалевого провідника при протіканні по ньому змінного струму підвищеної щільності, який відрізняється тим, що вимірюють 3D-розподіл інтенсивності магнітного поля розсіювання із зовнішньої сторони індукційного каналу послідовно, у характерних місцях вздовж рідкометалевого...
Система запуску та контролю режимів роботи синхронного двигуна групи г-д
Номер патенту: 50114
Опубліковано: 15.10.2002
Автори: Пасмурских Олександр Олексійович, Марченко Андрій Бронікович, Чорний Олексій Петрович, Родькін Дмитро Йосипович, Зубова Олена Іванівна, Вошун Олексій Миколайович
МПК: H02P 7/06
Мітки: система, контролю, роботи, двигуна, синхронного, запуску, г-д, режимів, групи
Формула / Реферат:
1. Система запуску та контролю режиму роботи синхронного двигуна групи Г-Д, яка вмикає синхронний двигун з вимикачем у мережі статора, збуджувачем у мережі збудження та генератором постійного струму на валу, джерела живлення якірної мережі генератора з комутуючим апаратом, контакторний апарат в мережі живлення двигуна, перетворювачі для живлення обмотки збудження та якірної мережі на період пуску, яка відрізняється тим, що для спрощення...
Попередній патент: Спосіб термічної обробки деталей із залізовуглецевих сплавів
Наступний патент: Спосіб юстування рентгенівського дифрактометра
Випадковий патент: Набір для визначення активності ендотеліальної еластази в біологічних рідинах