Динамічна платформа
Номер патенту: 116139
Опубліковано: 12.02.2018
Автори: Онищенко Володимир Євгенович, Абраамян Карен Геворгович

Формула / Реферат
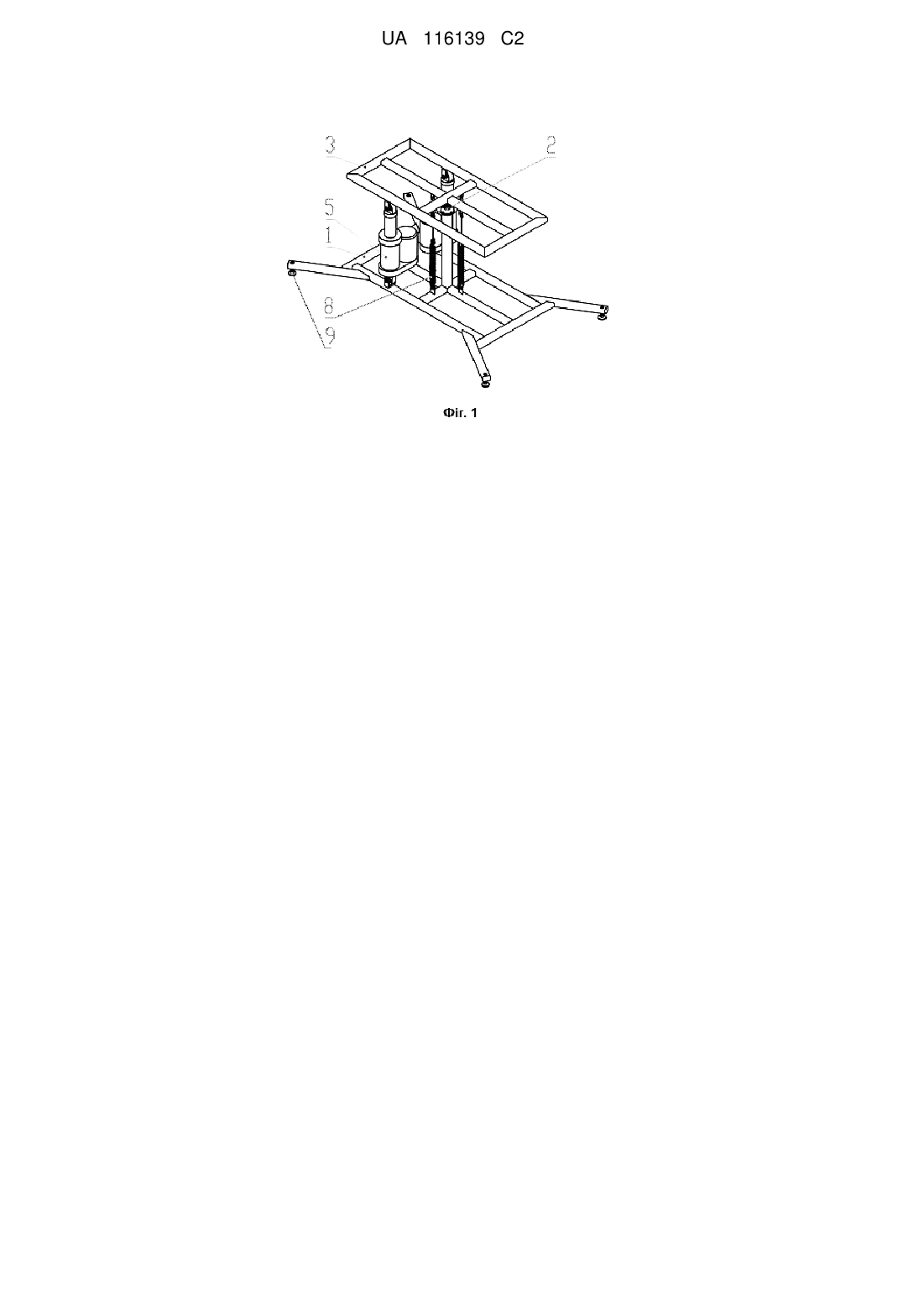
1. Динамічна платформа, що містить нерухому та робочу платформи, при цьому на нерухомій платформі розміщені кульовий шарнір на стійці та два вузли переміщення з приводами, закріплені шарнірно одним кінцем до нерухомої платформи, а другим до робочої з можливістю зміни її положення з корисним навантаженням відносно кульового шарніра, на якому вона закріплена, за допомогою блока керування у складі пульта управління, обчислювального пристрою і управляючого комп'ютера, а також датчиків зворотного зв'язку, при цьому вузли переміщення виконані у вигляді актуаторів типу гвинт-гайка із електродвигунами, пов'язаними з блоком керування, яка відрізняється тим, що нерухома та робоча платформи додатково з'єднані за допомогою чотирьох пружин стиснення або розтягнення, які розташовані в основних площинах симетрії динамічної платформи на однаковій відстані відносно кульового шарніра.
2. Динамічна платформа за п. 1, яка відрізняється тим, що кріплення актуаторів до нерухомої та робочої платформ виконано через кульові шарніри з еластичними втулками (сайленд-блоками).
3. Динамічна платформа за п. 1, яка відрізняється тим, що нерухома платформа встановлена на підлозі на віброопорах.
Текст
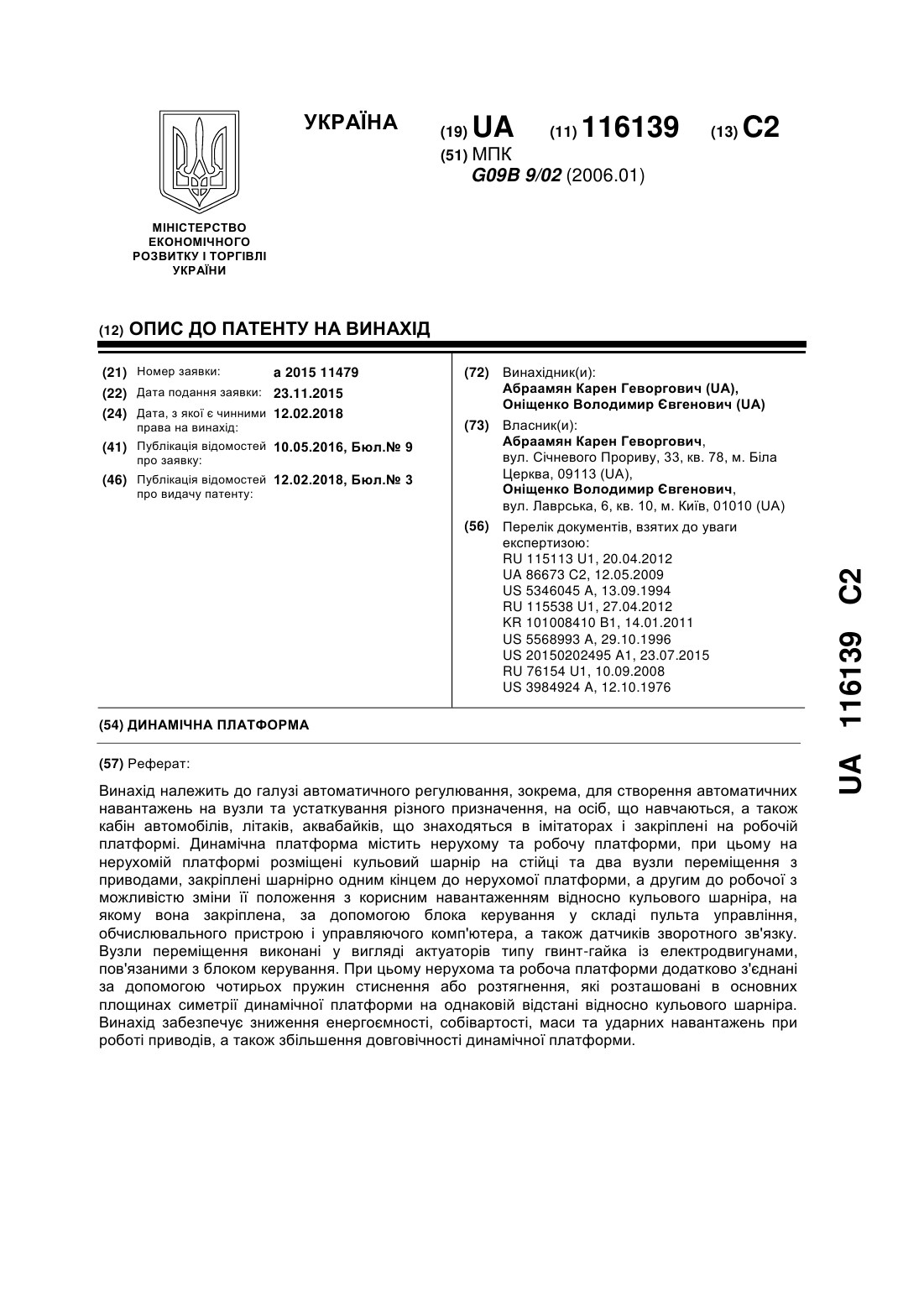
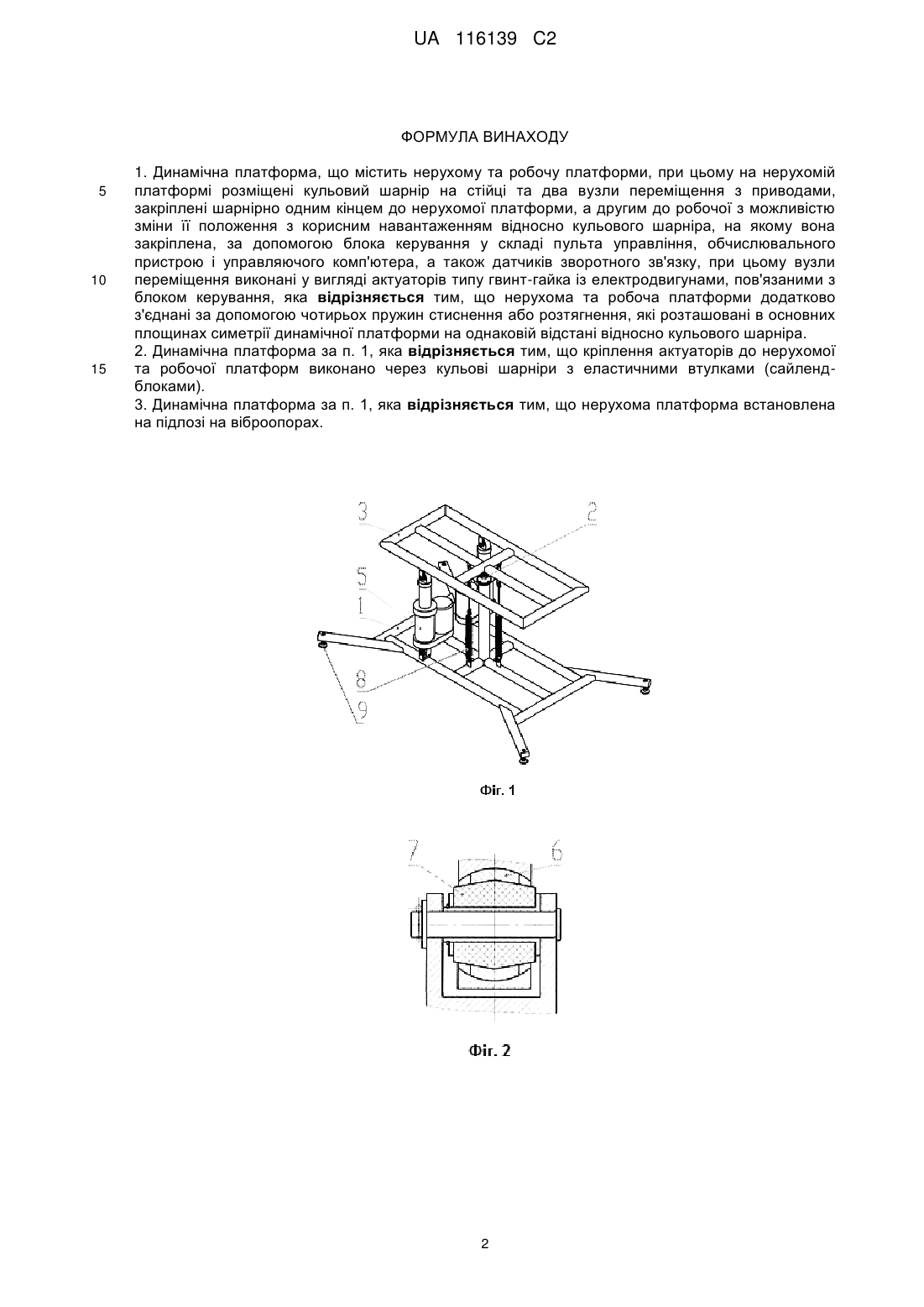
Реферат: Винахід належить до галузі автоматичного регулювання, зокрема, для створення автоматичних навантажень на вузли та устаткування різного призначення, на осіб, що навчаються, а також кабін автомобілів, літаків, аквабайків, що знаходяться в імітаторах і закріплені на робочій платформі. Динамічна платформа містить нерухому та робочу платформи, при цьому на нерухомій платформі розміщені кульовий шарнір на стійці та два вузли переміщення з приводами, закріплені шарнірно одним кінцем до нерухомої платформи, а другим до робочої з можливістю зміни її положення з корисним навантаженням відносно кульового шарніра, на якому вона закріплена, за допомогою блока керування у складі пульта управління, обчислювального пристрою і управляючого комп'ютера, а також датчиків зворотного зв'язку. Вузли переміщення виконані у вигляді актуаторів типу гвинт-гайка із електродвигунами, пов'язаними з блоком керування. При цьому нерухома та робоча платформи додатково з'єднані за допомогою чотирьох пружин стиснення або розтягнення, які розташовані в основних площинах симетрії динамічної платформи на однаковій відстані відносно кульового шарніра. Винахід забезпечує зниження енергоємності, собівартості, маси та ударних навантажень при роботі приводів, а також збільшення довговічності динамічної платформи. UA 116139 C2 (12) UA 116139 C2 UA 116139 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід призначений для використання у галузі автоматичного регулювання, зокрема, для створення автоматичних навантажень на вузли та устаткування різного призначення, на осіб, що навчаються, а також кабін автомобілів, літаків, аквабайків, що знаходяться в імітаторах і закріплені на робочій платформі. Відома триступенева динамічна платформа (патент України № 86673 від 02.07.2007 р.), що містить нерухому основу, на якій розміщені три вузли переміщення з приводами, що змінюють положення у просторі пересувного стола платформи, що несе корисне навантаження, блок управління приводами у складі пульта управління, обчислювального пристрою і управляючого комп'ютера, а також датчики зворотного зв'язку. Як приводи платформа містить приводи механічних переміщень, виконані у вигляді асинхронних електродвигунів з короткозамкненими роторами, пов'язаних з частотними перетворювачами і знижувальними редукторами, а як датчики зворотного зв'язку платформа містить абсолютні датчики кута повороту, виконані на основі магніточутливих мікросхем. До недоліків цієї платформи слід віднести велику енергоємність та собівартість, великі ударні навантаження особливо при початкових режимах роботи приводів, а отже, і пов'язана з цим довговічність самих приводів. В основу винаходу поставлено задачу у динамічній платформі шляхом встановлення її на віброопорах із застосуванням актуаторів, які встановлені на кульових шарнірах з еластичними втулками, та щонайменше чотирьох пружин, що з'єднують нерухому і робочу платформи, забезпечити зниження енергоємності, маси, собівартості та ударних навантажень при роботі приводів, і збільшення довговічності. Суть винаходу полягає у платформі, що містить нерухому платформу, на якій розміщені кульовий шарнір та два вузли переміщення з приводами, закріпленими шарнірно одним кінцем до нерухомої платформи, а другим до робочої, з можливістю зміни положення робочої платформи з корисним навантаженням відносно кульового шарніра, на якому вона закріплена, при цьому приводи виконані у вигляді актуаторів типу гвинт-гайка із електродвигунами, пов'язаних із блоком керування з пультом. Кріплення актуаторів до нерухомої та робочої платформ виконано через кульові шарніри з еластичними втулками (сайленд-блоками). Сама нерухома платформа встановлена на підлозі на віброопорах. До нерухомої та робочої платформ кріпляться чотири пружини стиснення або розтягнення, які розташовані в основних площинах симетрії динамічної платформи на однаковій відстані відносно кульового шарніра. На фіг. 1 зображена динамічна платформа. На фіг. 2 зображений переріз кріплення актуатора. На фіг. 3 зображена динамічна платформа з нахиленою робочою платформою. Динамічна платформа (див. фіг. 1) складається із нерухомої платформи 1, кульовового шарніра 2, на якому закріплена робоча платформа 3 із корисним навантаженням 4, двох актуаторів 5, що встановлені на кульових шарнірах 6 з еластичними втулками 7 (див. фіг. 2), та щонайменше чотирьох пружин 8. Пружини 8 можуть бути як пружинами стиснення, так і розтягнення. Динамічна платформа встановлена на підлозі на віброопорах 9. Актуатори 5 виконують нахил робочої платформи 3 із корисним навантаженням 4 в будь-який бік на заданий кут відносно кульового шарніра 2, що задається з пульта блока керування. Використання актуаторів 5 дозволяє зменшити потужність електродвигунів, оскільки їхній К.К.Д. (для К.Г.П. більше 90 %) набагато більший за К.К.Д. черв'ячних редукторів (50-70 %), які використовуються у прототипі. Для згладжування динамічних навантажень, а отже, і збільшення довговічності усіх робочих вузлів динамічної платформи, вона встановлена на віброопорах 9, а в кульових шарнірах 6 актуаторів 5 встановлені еластичні втулки 7 (див. фіг. 2). Зазвичай, корисне навантаження 4 встановлюється на робочій платформі 3, таким чином, щоб його сила тяжіння G була на одній осі з кульовим шарніром 2. Оскільки цент тяжіння корисного навантаження знаходиться вище кульового шарніра 2, то при нахилі робочої платформи 3 виникає момент Gh (див. фіг. 3), що дає додаткове, окрім динамічного, навантаження на приводи актуаторів при переміщенні у зворотному напрямку робочої платформи 3. Для компенсації частини або повністю момента Gh встановлено щонайменше чотири пружини 8. Наприклад: при використанні пружин розтягнення при нахилі робочої платформи 3 пружини 8, розташовані під нахиленою частиною робочої платформи 3, розтягуються менше, а пружини, розташовані під піднятою частиною робочої платформи 3, розтягуються більше. У підсумку виникає момент FH, який протидіє моменту Gh. При правильному підборі (розрахунку) пружин 8 моменти Gh та FH будуть рівними і приводам актуаторів 5 доведеться долати лише динамічні навантаження. За рахунок цього потужність приводів актуаторів 5 може бути зменшена, а отже, буде знижена собівартість та маса динамічної платформи в цілому. При використанні пружин стиснення матимемо той самий ефект, тільки сила F буде знаходитись з іншого боку від кульового шарніра 2. 1 UA 116139 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 1. Динамічна платформа, що містить нерухому та робочу платформи, при цьому на нерухомій платформі розміщені кульовий шарнір на стійці та два вузли переміщення з приводами, закріплені шарнірно одним кінцем до нерухомої платформи, а другим до робочої з можливістю зміни її положення з корисним навантаженням відносно кульового шарніра, на якому вона закріплена, за допомогою блока керування у складі пульта управління, обчислювального пристрою і управляючого комп'ютера, а також датчиків зворотного зв'язку, при цьому вузли переміщення виконані у вигляді актуаторів типу гвинт-гайка із електродвигунами, пов'язаними з блоком керування, яка відрізняється тим, що нерухома та робоча платформи додатково з'єднані за допомогою чотирьох пружин стиснення або розтягнення, які розташовані в основних площинах симетрії динамічної платформи на однаковій відстані відносно кульового шарніра. 2. Динамічна платформа за п. 1, яка відрізняється тим, що кріплення актуаторів до нерухомої та робочої платформ виконано через кульові шарніри з еластичними втулками (сайлендблоками). 3. Динамічна платформа за п. 1, яка відрізняється тим, що нерухома платформа встановлена на підлозі на віброопорах. 2 UA 116139 C2 Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G09B 9/02
Код посилання
<a href="https://ua.patents.su/5-116139-dinamichna-platforma.html" target="_blank" rel="follow" title="База патентів України">Динамічна платформа</a>
Платформа динамічна
Номер патенту: 1376
Опубліковано: 15.08.2002
Автори: Смоляков Василь Андрійович, Гулевський Юрій Володимирович, Бусяк Юрій Митрофанович, Магерамов Лютфалій Курбан-Алієвич
МПК: G01M 1/02, G09B 9/04, G09B 9/00, G01M 1/00, G09B 9/02
Формула / Реферат:
Платформа динамічна, яка містить площадку, що закріплена на основі за допомогою пружної підвіски і кінематично зв’язана з основою за допомогою механізмів хитання, які включають шарнірні з’єднання, яка відрізняється тим, що площадка з`єднана з механізмами хитання за допомогою щонайменше трьох шарнірних з’єднань, пружна підвіска оснащена похилим важелем, один кінець якого сполучений із площадкою за допомогою карданного шарніра, розміщеного в...
Динамічна триступенева платформа
Номер патенту: 26362
Опубліковано: 10.09.2007
Автори: Матвієвський Олександр Миколайович, Матвієвський Микола Олександрович
Мітки: платформа, триступенева, динамічна
Формула / Реферат:
1. Триступенева динамічна платформа, що містить нерухому основу, на якій розміщені три вузли переміщення з приводами, що змінюють положення у просторі пересувного стола платформи, що несе корисне навантаження, блок керування приводами у складі пульта керування, обчислювального пристрою і керуючого комп'ютера, а також датчики зворотного зв'язку, яка відрізняється тим, що як приводи платформа містить приводи механічних переміщень, виконані у...
Динамічна триступенева платформа
Номер патенту: 86673
Опубліковано: 12.05.2009
Автори: Матвієвський Микола Олександрович, Матвієвський Олександр Миколайович
МПК: G09B 9/02, G09B 9/00, F15B 9/00
Мітки: триступенева, платформа, динамічна
Формула / Реферат:
1. Триступенева динамічна платформа, що містить нерухому основу, на якій розміщені три вузли переміщення з приводами, що змінюють положення у просторі пересувного стола платформи, що несе корисне навантаження, блок управління приводами у складі пульта управління, обчислювального пристрою і управляючого комп'ютера, а також датчики зворотного зв'язку, яка відрізняється тим, що як приводи платформа містить приводи механічних переміщень, виконані...
Крокуюча платформа “жук” для переміщення великотоннажних та великогабаритних вантажів
Номер патенту: 38578
Опубліковано: 12.01.2009
Автор: Фельдман Борис Мордухович
Мітки: переміщення, жук, великотоннажних, вантажів, крокуюча, великогабаритних, платформа
Формула / Реферат:
Крокуюча платформа для переміщення великотоннажних та великогабаритних вантажів, що містить рухому платформу з множинністю рухомих опор у вертикальному напрямку відносно платформи, яка відрізняється тим, що платформа виконана як двоярусна, поділена на робочу та допоміжну платформи, рівномірно пересувні у повздовжньому та поперечному напрямках та обертальні навколо вертикальної осі одна відносно одної, з кількістю рухомих опор - не менше ніж...
Платформа для перевезення вантажу
Номер патенту: 112872
Опубліковано: 26.12.2016
Автор: Масліков Юрій Валентинович
МПК: B61D 3/00
Мітки: перевезення, платформа, вантажу
Формула / Реферат:
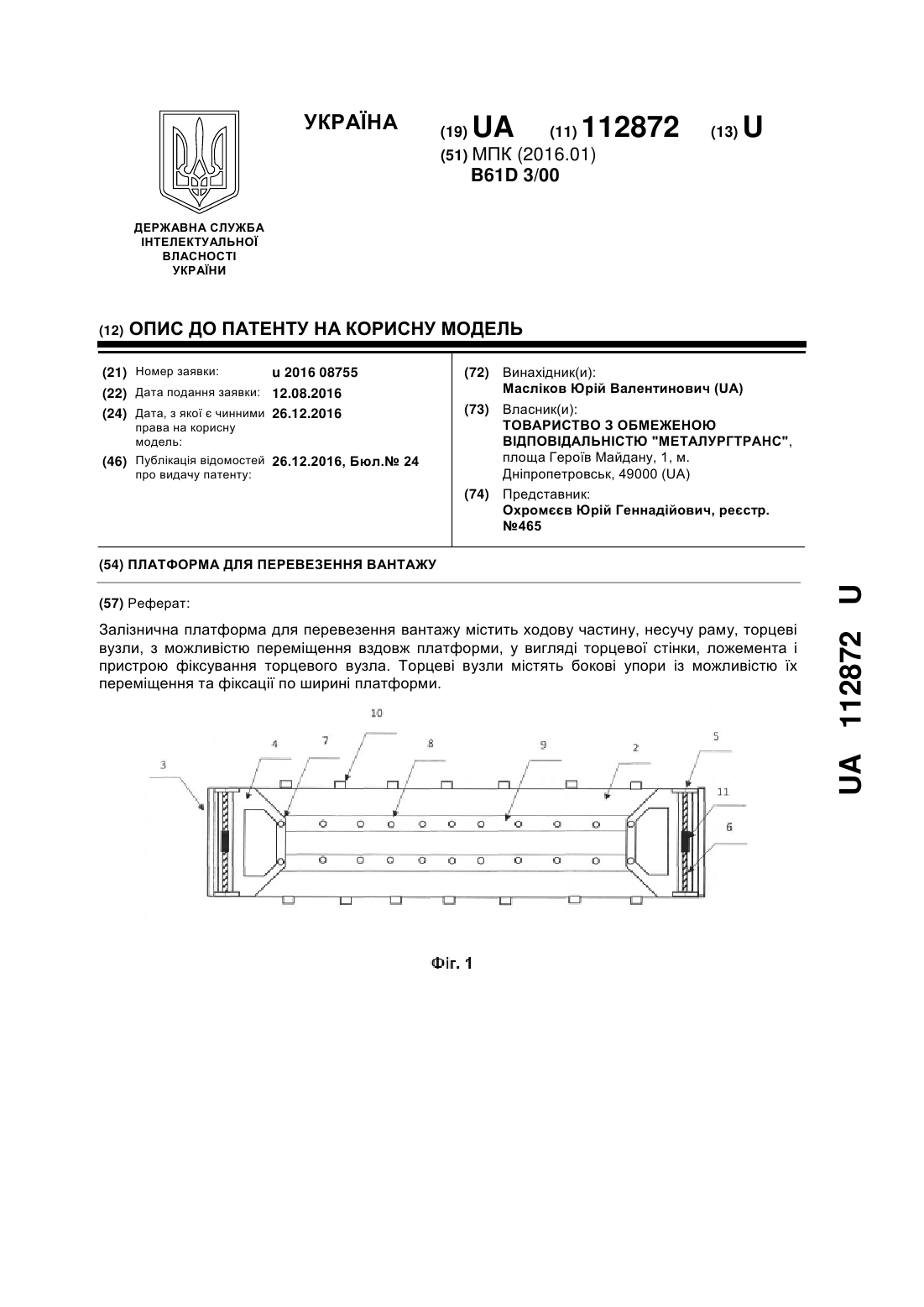
1. Залізнична платформа для перевезення вантажу, що містить ходову частину, несучу раму, торцеві вузли, з можливістю переміщення вздовж платформи, у вигляді торцевої стінки, ложемента і пристрою фіксування торцевого вузла, яка відрізняється тим, що торцеві вузли містять бокові упори із можливістю їх переміщення та фіксації по ширині платформи.2. Залізнична платформа за п. 1, яка відрізняється тим, що бокові упори переміщаються за...
Попередній патент: Пристрій для термічної обробки бобів сої
Наступний патент: Стиснення розкладених представлень звукового поля
Випадковий патент: Спосіб вирощування капусти білоголової пізньостиглої з використанням сидеральних добрив