Платформа динамічна
Номер патенту: 1376
Опубліковано: 15.08.2002
Автори: Магерамов Лютфалій Курбан-Алієвич, Гулевський Юрій Володимирович, Смоляков Василь Андрійович, Бусяк Юрій Митрофанович
Формула / Реферат
Платформа динамічна, яка містить площадку, що закріплена на основі за допомогою пружної підвіски і кінематично зв’язана з основою за допомогою механізмів хитання, які включають шарнірні з’єднання, яка відрізняється тим, що площадка з`єднана з механізмами хитання за допомогою щонайменше трьох шарнірних з’єднань, пружна підвіска оснащена похилим важелем, один кінець якого сполучений із площадкою за допомогою карданного шарніра, розміщеного в межах геометричної фігури, утвореної центрами шарнірних з’єднань, а другий кінець жорстко зв’язаний з торсионним валом, закріпленим на основі за межами проекції згаданої геометричної фігури в плані, при цьому R>L, де:
R - відстань по горизонталі між віссю карданного шарніра і віссю торсіонного вала (мм);
L - відстань між центром карданного шарніра і центром шарнірного з’єднання, розташованого з боку торсіонного вала (мм).
Текст
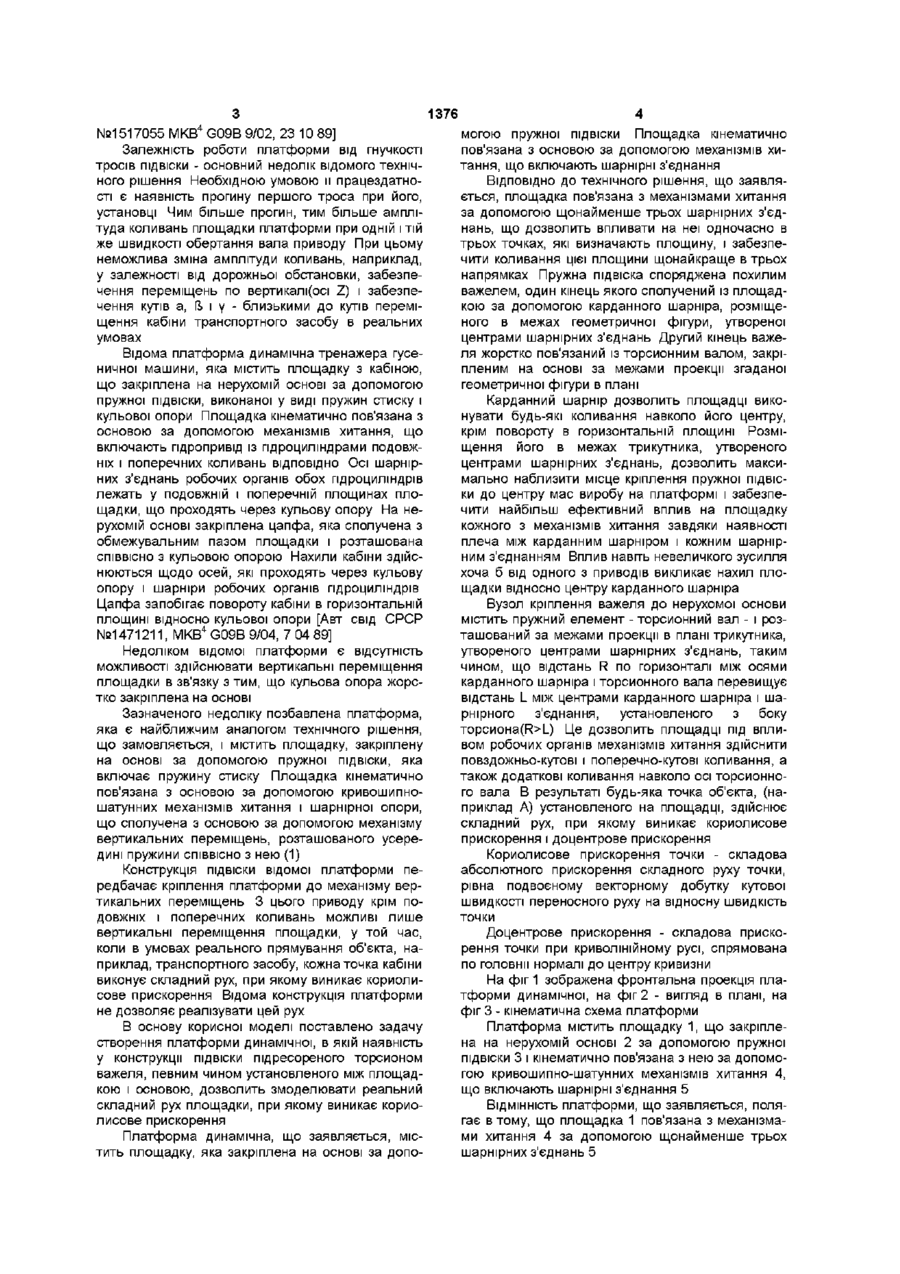
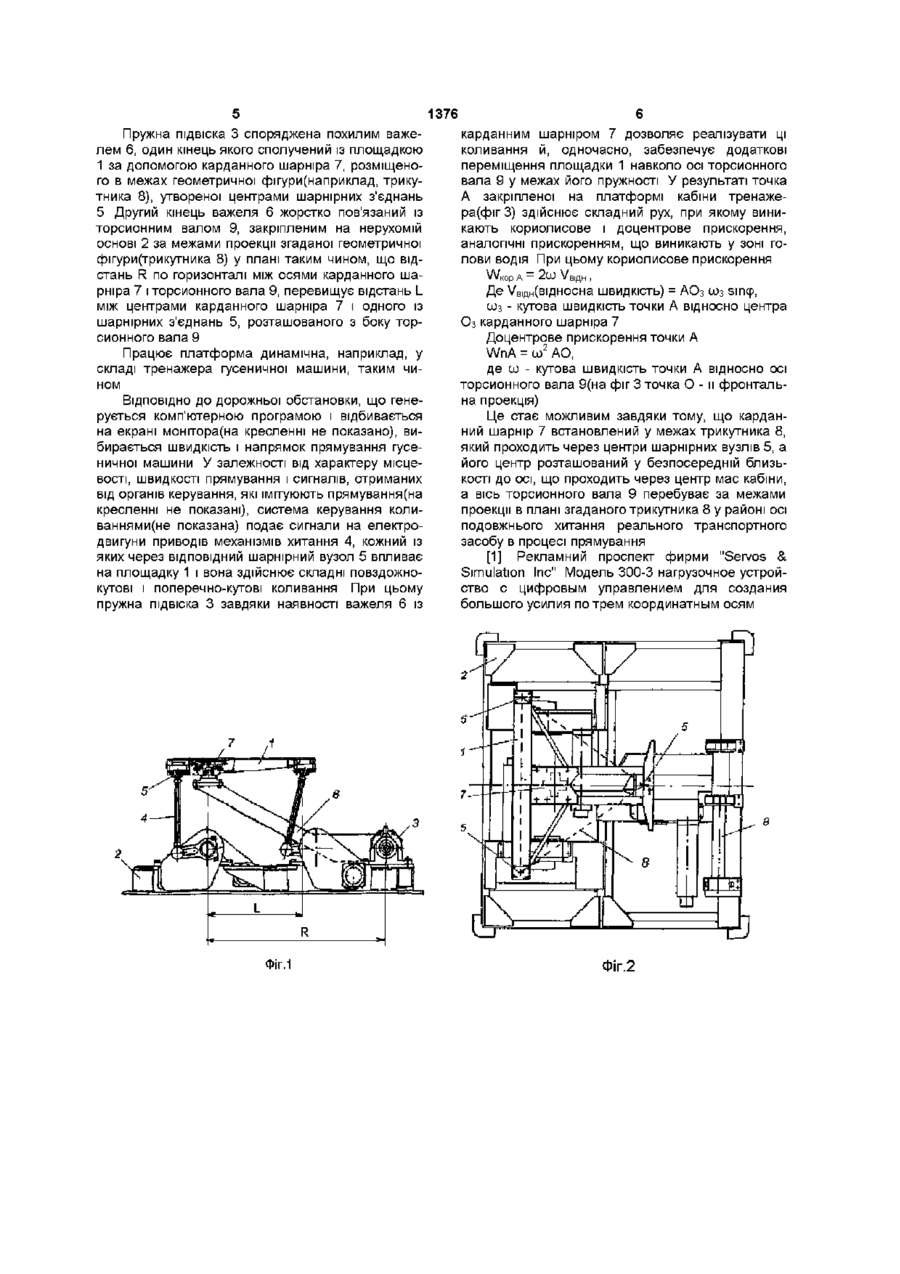
Платформа динамічна, яка містить площадку, що закріплена на основі за допомогою пружної ПІДВІСКИ і кінематично зв'язана з основою за допомогою механізмів хитання, які включають шарнірні з'єднання, яка відрізняється тим, що площадка з єднана з механізмами хитання за допомогою щонайменше трьох шарнірних з'єднань, пружна підвіска оснащена похилим важелем, один кінець якого сполучений із площадкою за допомогою карданного шарніра, розміщеного в межах геометричної фігури, утвореної центрами шарнірних з'єднань, а другий кінець жорстко зв'язаний з торсионним валом, закріпленим на основі за межами проекції згаданої геометричної фігури в плані, при цьому R>L, де R - відстань по горизонталі між віссю карданного шарніра і віссю торсюнного вала (мм), L - відстань між центром карданного шарніра і центром шарнірного з'єднання, розташованого з боку торсюнного вала (мм) Корисна модель належить до машинобудування, зокрема, до засобів для створення складного руху об'єкта в просторі, і може бути використане в тренажерах транспортних засобів та випробних стендах Відома динамічна платформа тренажера водія транспортного засобу, яка крім того містить кабіну з органами керування Платформа складається з нерухомої основи і хрестоподібної рами з площадкою Кабіна за допомогою У-подібної вилки підвішена між бічними стійками рами на двох цапфах На однієї з цапф закріплений важіль, пов'язаний із приводом подовжнього нахилу Задня стійка рами за допомогою кульової опори сполучена з задньою стійкою нерухомої основи, а передня стійка рами має цапфу, що проходить через паз у передній СТІЙЦІ нерухомої основи Кінець цапфи сполучений із приводом вертикального переміщення До задньої стійки основи прикріплений Г-подібний кронштейн, на КІНЦІ якого встановлений привід поперечних коливань площадки, пов'язаний із задньої стійкої рами 3 його допомогою площадка разом із кабіною може повертатися в поперечній площині на кульовій опорі і СПІВВІСНОЮ з нею цапфі Осі подовжніх і поперечних переміщень кабіни взаємно перпендикулярні і лежать в одній площині на рівні центру ваги кабіни [Авт свід СРСР №938298, МКВ^ G09 В 9/04, 23 06 82] Конструкція відомої платформи являє собою розвинену об'ємно-просторову структуру, яка включає множину рухливих один до одного елементів і є достатньо складної Наявність декількох приводів, кожний із яких дозволяє створити прямування тільки в одній визначеній площині, обмежує імітаційні можливості тренажера Відома платформа динамічна тренажера для персоналу транспортних засобів, що містить нерухому основу і площадку з кабіною, підвішену на неї за допомогою тросів Один із тросів розташований у поперечній площині передньої частини кабіни і закріплений під площадкою за допомогою двох опор, рівновіддалених від и центру мас Інший трос одним кінцем шарнірно прикріплений до задньої частини площадки кабіни зі зсувом щодо її центру мас, а іншим - до приводу платформи, виконаному у вигляді кінематично пов'язаного з двигуном кривошипа, сполученого із шатуном Шатун у середній частині за допомогою поворотної осі пов'язаний із кареткою, встановленою в поперечних направляючих, а вільним кінцем - із другим тросом ПІДВІСКИ Через цей трос передається зусилля від приводу на основу кабіни і відбувається поворот кабіни навколо першого троса на визначений кут при одночасному повороті в поперечній площині внаслідок зсуву центру мас, а також у горизонтальній площині [Авт свід СРСР (О со 1376 №1517055 MKB4 G09B 9/02, 23 10 89] Залежність роботи платформи від гнучкості тросів ПІДВІСКИ - основний недолік відомого технічного рішення Необхідною умовою и працездатності є наявність прогину першого троса при його, установці Чим більше прогин, тим більше амплітуда коливань площадки платформи при одній і тій же швидкості обертання вала приводу При цьому неможлива зміна амплітуди коливань, наприклад, у залежності від дорожньої обстановки, забезпечення переміщень по вертикалі(осі Z) і забезпечення кутів а, (і і у - близькими до кутів переміщення кабіни транспортного засобу в реальних умовах Відома платформа динамічна тренажера гусеничної машини, яка містить площадку з кабіною, що закріплена на нерухомій основі за допомогою пружної ПІДВІСКИ, виконаної у виді пружин стиску і кульової опори Площадка кінематично пов'язана з основою за допомогою механізмів хитання, що включають пдропривід із гідроциліндрами подовжніх і поперечних коливань ВІДПОВІДНО ОСІ шарнірних з'єднань робочих органів обох гідроциліндрів лежать у подовжній і поперечній площинах площадки, що проходять через кульову опору На нерухомій основі закріплена цапфа, яка сполучена з обмежувальним пазом площадки і розташована СПІВВІСНО з кульовою опорою Нахили кабіни здійснюються щодо осей, які проходять через кульову опору і шарніри робочих органів гідроциліндрів Цапфа запобігає повороту кабіни в горизонтальній площині відносно кульової опори [Авт свід СРСР №1471211, MKB4 G09B 9/04, 7 04 89] Недоліком відомої платформи є відсутність можливості здійснювати вертикальні переміщення площадки в зв'язку з тим, що кульова опора жорстко закріплена на основі Зазначеного недоліку позбавлена платформа, яка є найближчим аналогом технічного рішення, що замовляється, і містить площадку, закріплену на основі за допомогою пружної ПІДВІСКИ, яка включає пружину стиску Площадка кінематично пов'язана з основою за допомогою кривошипношатунних механізмів хитання і шарнірної опори, що сполучена з основою за допомогою механізму вертикальних переміщень, розташованого усередині пружини СПІВВІСНО з нею (1) Конструкція ПІДВІСКИ відомої платформи передбачає кріплення платформи до механізму вертикальних переміщень 3 цього приводу крім подовжніх і поперечних коливань можливі лише вертикальні переміщення площадки, у той час, коли в умовах реального прямування об'єкта, наприклад, транспортного засобу, кожна точка кабіни виконує складний рух, при якому виникає кориолисове прискорення Відома конструкція платформи не дозволяє реалізувати цей рух В основу корисної моделі поставлено задачу створення платформи динамічної, в якій наявність у конструкції ПІДВІСКИ підресореного торсионом важеля, певним чином установленого між площадкою і основою, дозволить змоделювати реальний складний рух площадки, при якому виникає кориолисове прискорення Платформа динамічна, що заявляється, містить площадку, яка закріплена на основі за допо могою пружної ПІДВІСКИ Площадка кінематично пов'язана з основою за допомогою механізмів хитання, що включають шарнірні з'єднання ВІДПОВІДНО ДО технічного рішення, що заявляється, площадка пов'язана з механізмами хитання за допомогою щонайменше трьох шарнірних з'єднань, що дозволить впливати на неї одночасно в трьох точках, які визначають площину, і забезпечити коливання цієї площини щонайкраще в трьох напрямках Пружна підвіска споряджена похилим важелем, один кінець якого сполучений із площадкою за допомогою карданного шарніра, розміщеного в межах геометричної фігури, утвореної центрами шарнірних з'єднань Другий кінець важеля жорстко пов'язаний із торсионним валом, закріпленим на основі за межами проекції згаданої геометричної фігури в плані Карданний шарнір дозволить площадці виконувати будь-які коливання навколо його центру, крім повороту в горизонтальній площині Розміщення його в межах трикутника, утвореного центрами шарнірних з'єднань, дозволить максимально наблизити місце кріплення пружної ПІДВІСКИ до центру мас виробу на платформі і забезпечити найбільш ефективний вплив на площадку кожного з механізмів хитання завдяки наявності плеча між карданним шарніром і кожним шарнірним з'єднанням Вплив навіть невеличкого зусилля хоча б від одного з приводів викликає нахил площадки відносно центру карданного шарніра Вузол кріплення важеля до нерухомої основи містить пружний елемент - торсионний вал - і розташований за межами проекції в плані трикутника, утвореного центрами шарнірних з'єднань, таким чином, що відстань R по горизонталі між осями карданного шарніра і торсионного вала перевищує відстань L між центрами карданного шарніра і шарнірного з'єднання, установленого з боку TopcnoHa(R>L) Це дозволить площадці під впливом робочих органів механізмів хитання здійснити повздожньо-кутові і поперечно-кутові коливання, а також додаткові коливання навколо осі торсионного вала В результаті будь-яка точка об'єкта, (наприклад А) установленого на площадці, здійснює складний рух, при якому виникає кориолисове прискорення і доцентрове прискорення Кориолисове прискорення точки - складова абсолютного прискорення складного руху точки, рівна подвоєному векторному добутку кутової швидкості переносного руху на відносну швидкість точки Доцентрове прискорення - складова прискорення точки при криволінійному русі, спрямована по головнії нормалі до центру кривизни На фіг 1 зображена фронтальна проекція платформи динамічної, на фіг 2 - вигляд в плані, на фіг 3 - кінематична схема платформи Платформа містить площадку 1, що закріплена на нерухомій основі 2 за допомогою пружної ПІДВІСКИ 3 і кінематично пов'язана з нею за допомогою кривошипно-шатунних механізмів хитання 4, що включають шарнірні з'єднання 5 ВІДМІННІСТЬ платформи, що заявляється, полягає в тому, що площадка 1 пов'язана з механізмами хитання 4 за допомогою щонайменше трьох шарнірних з'єднань 5 1376 Пружна підвіска 3 споряджена похилим важелем 6, один кінець якого сполучений із площадкою 1 за допомогою карданного шарніра 7, розміщеного в межах геометричної фігури(наприклад, трикутника 8), утвореної центрами шарнірних з'єднань 5 Другий кінець важеля 6 жорстко пов'язаний із торсионним валом 9, закріпленим на нерухомій основі 2 за межами проекції згаданої геометричної фігури(трикутника 8) у плані таким чином, що відстань R по горизонталі між осями карданного шарніра 7 і торсионного вала 9, перевищує відстань L між центрами карданного шарніра 7 і одного із шарнірних з'єднань 5, розташованого з боку торсионного вала 9 Працює платформа динамічна, наприклад, у складі тренажера гусеничної машини, таким чином ВІДПОВІДНО ДО дорожньої обстановки, що генерується комп'ютерною програмою і відбивається на екрані монітора(на кресленні не показано), вибирається швидкість і напрямок прямування гусеничної машини У залежності від характеру місцевості, швидкості прямування і сигналів, отриманих від органів керування, які імітуюють прямування(на кресленні не показані), система керування коливаннями(не показана) подає сигнали на електродвигуни приводів механізмів хитання 4, кожний із яких через ВІДПОВІДНИЙ шарнірний вузол 5 впливає на площадку 1 і вона здійснює складні повздожнокутові і поперечно-кутові коливання При цьому пружна підвіска 3 завдяки наявності важеля 6 із ФІГ.1 карданним шарніром 7 дозволяє реалізувати ці коливання й, одночасно, забезпечує додаткові переміщення площадки 1 навколо осі торсионного вала 9 у межах його пружності У результаті точка А закріпленої на платформі кабіни тренажера(фігЗ) здійснює складний рух, при якому виникають кориолисове і доцентрове прискорення, аналогічні прискоренням, що виникають у зоні голови водія При цьому кориолисове прискорення W K O p А - 2 Ш Увідн , Де \/Відн(відносна швидкість) = АОз шз sincp, шз - кутова швидкість точки А відносно центра Оз карданного шарніра 7 Доцентрове прискорення точки А 2 WnA = ш АО, де ш - кутова швидкість точки А відносно осі торсионного вала 9(на фіг 3 точка О - и фронтальна проекція) Це стає можливим завдяки тому, що карданний шарнір 7 встановлений у межах трикутника 8, який проходить через центри шарнірних вузлів 5, а його центр розташований у безпосередній близькості до осі, що проходить через центр мас кабіни, а вісь торсионного вала 9 перебуває за межами проекції в плані згаданого трикутника 8 у районі осі подовжнього хитання реального транспортного засобу в процесі прямування [1] Рекламний проспект фирми "Servos & Simulation Inc" Модель 300-3 нагрузочное устройство с цифровым управлением для создания большого усилия п о т р е м координатным осям Фіг.2 1376 о. Фіг З ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюBusiak Yurii Mytrofanovych, Gulevskyi Yurii Volodymyrovych, Maheramov Liuftfalii Kurban-Alievych, Maheramov Liutfalii Kurban-Aliievych, Smoliakov Vasyl Andriiovych
Автори російськоюБусяк Юрий Митрофанович, Гулевский Юрий Владимирович, Магерамов Лютфалий Курбан-Алиевич, Смоляков Василий Андреевич
МПК / Мітки
МПК: G09B 9/02, G09B 9/00, G09B 9/04, G01M 1/00, G01M 1/02
Код посилання
<a href="https://ua.patents.su/4-1376-platforma-dinamichna.html" target="_blank" rel="follow" title="База патентів України">Платформа динамічна</a>
Платформа
Номер патенту: 47919
Опубліковано: 15.07.2002
Автори: Автономов Семен Володимирович, Хижняк Микола Якович, Броневицький Володимир Юрійович, Автономов Костянтин Володимирович
МПК: E21F 13/00
Мітки: платформа
Формула / Реферат:
Платформа, яка включає раму з установленими двома колісними парами, боковими стояками, кріпильними ланцюгами й листовою основою, закріпленою на верхній частині рами, яка відрізняється тим, що рама обладнана чотирма коромислами, установленими на поперечних горизонтальних осях, розміщених в пазах рами, і з’єднаних попарно між собою двома колісними парами, на одній з яких колеса виконані без реборд.
Плавуча напівзанурена морська платформа
Номер патенту: 36371
Опубліковано: 16.04.2001
Автори: Ажермачов Сергій Геннадійович, Козловський Леонід Костянтинович, Ажермачов Геннадій Арсентійович, Козловскій Андрєй Лєонідовіч
МПК: B63B 35/44
Мітки: морська, плавуча, напівзанурена, платформа
Текст:
...континентального шельфу або для інших цілей. Наприклад, застосувавши декілька підводних човнів значної тоннажності, зв'язав їх елементами решітки, можна збільшити головні розмірення платформи і використовувати її для запуску штучни х суп утників Землі з акваторії океану. Сукупність ознак винаходу забезпечить досягнення його технічного результату. Винахід ілюструється графічним матеріалом, де на фіг. 1 зображена плавуча напівзанурена...
Динамічна сирена
Номер патенту: 33211
Опубліковано: 15.02.2001
Автори: Карачун Володимир Володимирович, Петрик Олександр Владиславович, Тривайло Михайло Семенович, Гнатейко Нонна Валентиновна
МПК: G10K 7/00
Текст:
...надається можливість коректувати структуру спектра звукових коливань у бажаному * напрямку: змінювати його щільність, усувати провали, перерозподіли-' ти середню потужність процесу за складовими і таке інше. і Заявляема динамічна сирена наведена на фіг.І, загальний вид, на фіг.2 - ротори. Сирена налічує корпус І, в котрому розташовані встановлені один в другий ротори 2 і 3, у дисках 4 і 5 котрих відповідно до вимагаємих функцій модуляції...
Імпульсна динамічна муфта

Номер патенту: 43167
Опубліковано: 15.11.2001
Автори: Комар Роман Васильович, Лясота Оксана Михайлівна, Гевко Іван Богданович, Шевчук Ігор Михайлович
МПК: F16H 33/00
Мітки: імпульсна, динамічна, муфта
Формула / Реферат:
Імпульсна динамічна муфта, що містить імпульсатор знакопостійних імпульсів, вхідний і вихідний вали, планетарний механізм, в якому центральне колесо із внутрішніми зубцями і водило встановлені на вхідному валу, а центральне колесо із зовнішніми зубцями - на вихідному валу імпульсатора, який відрізняється тим, що сателіти планетарного механізму виконані складеними із маточини і зубчастого вінця, причому зубчастий вінець, що виготовлений із...
Універсальна вантажна платформа
Номер патенту: 47516
Опубліковано: 15.07.2002
Автор: Мануйлов Михайло Іванович
МПК: B60P 3/42
Мітки: платформа, вантажна, універсальна
Формула / Реферат:
І. Універсальна вантажна платформа для колісних і інших транспортних засобів у вигляді контейнера, яка містить днище, вузли-парні подовжні та поперечні балки, бічні і торцеві стінки, рухомі і стаціонарні вузли скріплення на базі контейнера міжнародного стандарту, яка відрізняється тим, що містить додаткові, скріплені з днищем опорні балки з можливістю скріплення з ними транспортного засобу або іншого об’єкта.2. Платформа за п. 1, яка...
Попередній патент: Система пасивного аварійного охолодження корпуса ядерного реактора
Наступний патент: Привід стопора гармати
Випадковий патент: Ущільнювальне кільце