Пневматичний поршневий привод
Номер патенту: 119633
Опубліковано: 25.09.2017
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович

Формула / Реферат
Пневматичний поршневий привод, що містить циліндр з торцевими кришкою і фланцем з розміщеним усередині виконавчим поршнем з вихідним штоком, зрівноважуючий протидіючий вантаж через тягу і двоплечий важіль, з'єднаний зі штоком, а також пневмолінію вихідного тиску, приєднану до кришки, який відрізняється тим, що в циліндрі додатково між виконавчим поршнем і кришкою установлені перший і другий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням між кришкою і першим рухомим поршнем першої порожнини, сполученої з пневмолінією через додатково установлений дросель між рухомими першим, другим і виконавчим поршнями другої порожнини, сполученої безпосередньо, а третя порожнина між другим виконавчим рухомим поршнем і фланцем циліндра через отвори у фланці сполучена з атмосферою.
Текст
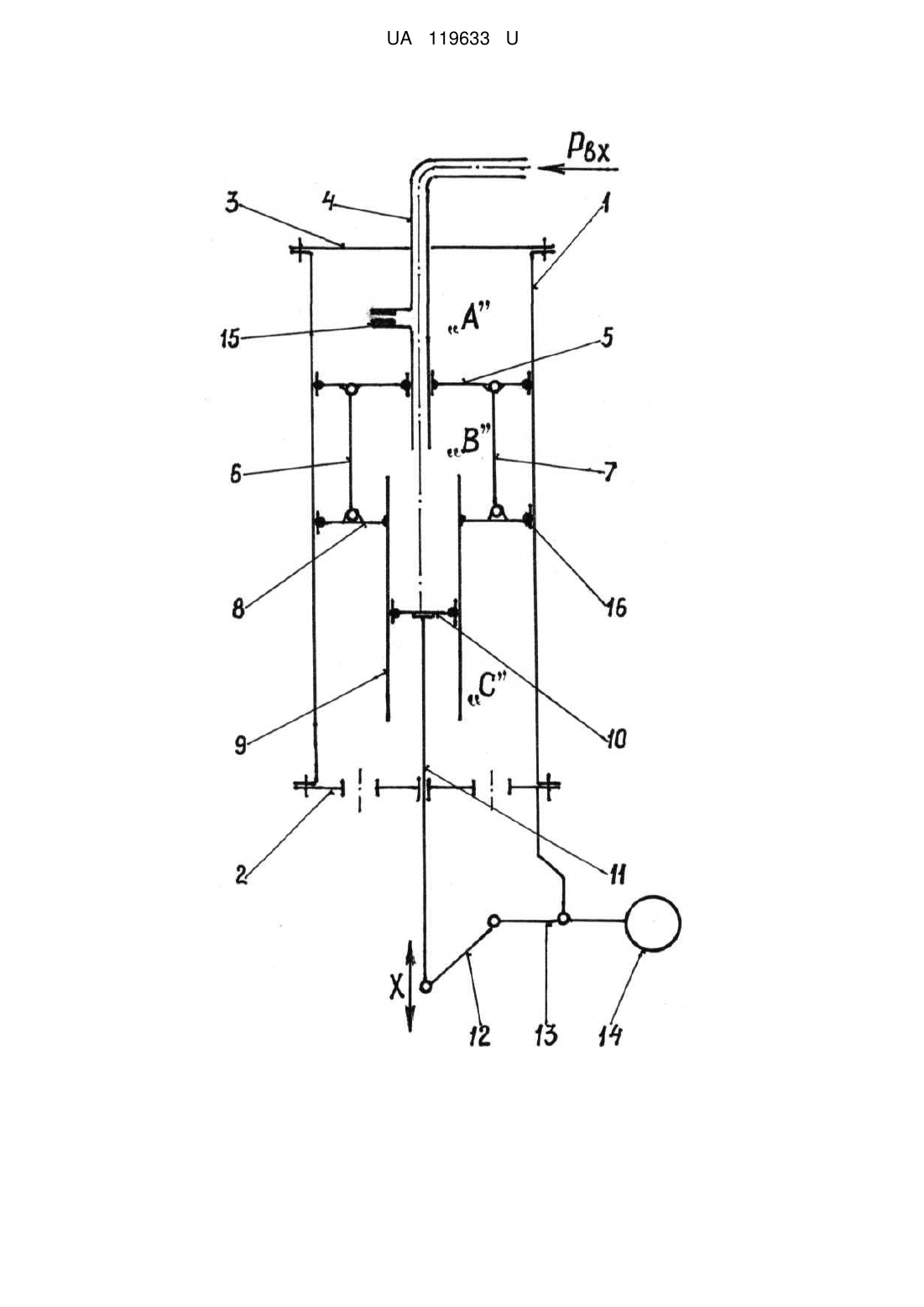
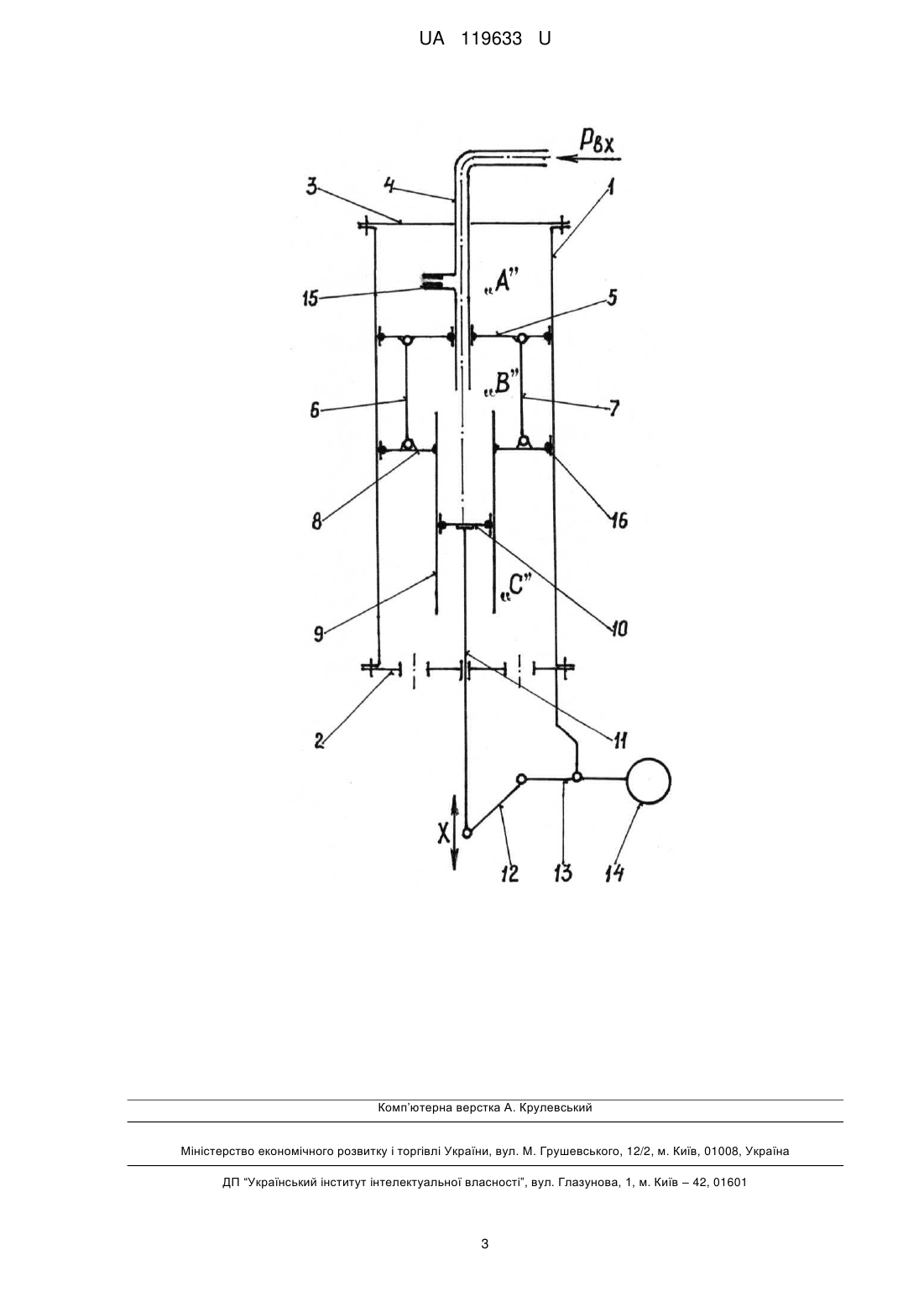
Реферат: Пневматичний поршневий привод містить циліндр з торцевими кришкою і фланцем з розміщеним усередині виконавчим поршнем з вихідним штоком, зрівноважуючий протидіючий вантаж через тягу і двоплечий важіль, з'єднаний зі штоком, а також пневмолінію вихідного тиску, приєднану до кришки. В циліндрі додатково між виконавчим поршнем і кришкою установлені перший і другий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням між кришкою і першим рухомим поршнем першої порожнини, сполученої з пневмолінією через додатково установлений дросель, між рухомими першим, другим і виконавчим поршнями другої порожнини сполученої безпосередньо. Третя порожнина між другим виконавчим рухомим поршнем і фланцем циліндра через отвори у фланці сполучена з атмосферою. UA 119633 U (54) ПНЕВМАТИЧНИЙ ПОРШНЕВИЙ ПРИВОД UA 119633 U UA 119633 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пневматичних виконавчих механізмів, призначених для перетворення вхідного тиску, що надходить від регулюючого або командного приладу, в переміщення регулюючого органу систем автоматичного регулювання (CAP) або керування (САК), який змінює приплив або стікання речовини або енергії в об'єкт керування, і може бути використана переважно у випадках необхідних значних переміщень вихідного штока. Із відомих, найбільш близьким за технічною суттю і реалізацією, є пневматичний поршневий привод одинарної дії, що містить циліндр з установленим всередині поршнем з виконавчим штоком, зв'язаним з протидіючим вантажем зрівноваження сили дії поршня і пневмолінією подачі тиску в циліндр (див. кн. И.А. Ибрагимов, Η.Г. Фарзане, Л.В. Илясов. Элементы и системы пневмоавтоматики. - 2-е изд., перераб. и доп. - М.: Высш. шк., 1985. - С. 493-494, рис. 12.3, а). Однак відомий поршневий привод через низьку швидкодію вихідних сигналів понижує точність функціонування і ефективність використання обладнаних ним CAP і САК різних галузей пневмоавтоматики, що обмежує область його застосування. В основу корисної моделі поставлено задачу підвищити швидкодію вихідних сигналів поршневого приводу за рахунок чого підвищити точність функціонування і ефективність використання обладнаних ним CAP і САК, а також розширити область його застосування. Поставлена задача вирішується тим, що у циліндрі з торцевими кришкою і фланцем додатково установлені перший і другий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням між кришкою і першим рухомим поршнем першої порожнини, сполученої з пневмолінією подачі тиску через додатково установлений дросель, між рухомими поршнями другої порожнини з пневмолінією, сполученою безпосередньо, а третьої порожнини між другим і виконавчим рухомими поршнями, а також фланцем через отвори в останньому, сполученої з атмосферою. Таке технічне рішення дасть можливість на виході запропонованого пневматичного поршневого приводу формувати виконавчий сигнал з додатковою складовою, пропорційною швидкості (першій похідній) від змінювання вхідного сигналу. Ступінь введення в закон формування першої похідної залежить від величини дроселювання подачі тиску, а також геометричних параметрів рухомих поршнів. Отже, завдяки можливому формуванню результативного вихідного сигналу пропорційного змінюванню вхідного і першій похідній його змінювання, розширюються динамічні властивості запропонованого поршневого привода, як коригуючої динамічної ланки, при послідовному включенні якої в CAP або САК підвищить точність їх функціонування, а також ефективність використання оснащених ними машин, агрегатів і технологічного обладнання, що розширить область його застосування. На представленому кресленні схематично показано загальний вигляд запропонованого пневматичного поршневого привода. Запропонований привод містить пневматичний циліндр 1 з фланцем 2, кришкою 3 і приєднаною пневмолінією 4 підведення газу від джерела тиску (на схемі не показано). У середині циліндра встановлений перший рухомий поршень 5, жорстко зв'язаний тягами 6, 7 з другим рухомим поршнем 8 з напрямною 9, в якій переміщується виконавчий поршень 10 зі штоком 11, протилежний кінець якого через тягу 12 зв'язаний з одним плечем двоплечого важеля 13, середня частина якого шарнірно з'єднана з циліндром 1, а друге плече - з протидіючим вантажем 14 зрівноважуючим розвиваючу силу виконавчого поршня 10. Перша порожнина "А" циліндра 1 між кришкою 3 і першим рухомим поршнем 5 з пневмолінією 4 сполучена через дросель 15, друга порожнина "В" між першим 5, другим 8 і виконавчим 10 рухомими поршнями - безпосередньо, а третя порожнина "С" між другим 8, виконавчим 10 рухомими поршнями і фланцем 2 через отвори в останньому - з атмосферою. Герметичність в порожнинах "А", "В", "С" забезпечується манжетами 16, установленими на поршнях 5, 8, 10. У вихідне положення виконавчий поршень 10 зі штоком 11 повертається протидіючим вантажем 14. Працює запропонований пневматичний поршневий привод наступним чином. При різкому підвищенні вхідного сигналу (тиску газу "Р"вх) через наявність дроселя 15 тиск газу в першій порожнині "А" зростатиме повільніше, ніж в другій порожнині "В". В результаті поршень 5 буде переміщатися догори і за собою переміщатиме поршень 8, зменшуючи об'єм порожнини "В" і тим самим створюючи додатковий в ній приріст тиску. При цьому виконавчий поршень 10, зв'язаний зі штоком 11 одержить додаткове переміщення, внаслідок чого буде додаватися два переміщення, тобто вихідний сигнал "X" привода складається із переміщення, викликаного змінюванням вхідного сигналу (підвищення тиску в порожнинах "А", "В" і вхідного 1 UA 119633 U 5 10 15 20 25 30 сигналу (переміщення поршня 8) і додатковим підвищенням через це тиску в порожнині "В". Від результативного переміщення штока 11 донизу через тягу 12 і двоплечий важіль 13 в протилежний бік переміститься вантаж 14 зрівноважуючи силу дії виконавчого поршня 10. При різкому пониженні вхідного сигналу "Р»вх запропонований привод працюватиме аналогічно з тією лише різницею, що вихідні переміщення його рухомих деталей будуть направлені в протилежний бік. Отже, як при різкому підвищенні, так і пониженні вхідного тиску запропонований пневматичний поршневий привод буде працювати як підсилювальнодиференціююча (ПД) динамічна ланка, забезпечуюча виконавчому поршню 10 і зв'язаному з ним, через вихідний шток 11, виконавчому органу CAP або САК переміщення, пропорційне змінюванню вхідного сигналу і швидкості його змінювання. У випадку повільного змінювання вхідного сигналу "Р"вх в пневмолінії 4 перепад тисків в порожнинах "А", "В" практично буде відсутній. В результаті рухомі поршні 5, 8, 10 і вихідний шток 11 будуть переміщатися з однаковою швидкістю і передавати вихідний сигнал на виконавчий орган CAP і САК, викликаний тільки змінюванням вхідного сигналу. В цьому випадку запропонований пневматичний поршневий привод буде працювати як підсилювальна (П) динамічна ланка. Таким чином, запропонований пневматичний поршневий привод, на відміну від відомого приводу має розширені функціональні можливості, оскільки в перехідних процесах являє собою ПД динамічну ланку. Застосування запропонованого пневматичного поршневого привода, у порівнянні з уже відомим, дасть можливість: - при незначній ускладненій конструкції забезпечити компактний привод за рахунок додаткової установки в циліндрі перетворювача вхідних сигналів у вигляді з'єднаних між собою рухомих поршнів і розміщення в ньому дроселя; - підвищити точність функціонування CAP і САК шляхом покращення динамічних показників приводу можливим формуванням складової вихідних сигналів, пропорційних швидкості змінювання вхідних сигналів з одночасним пневматичним підсумовуванням їх із пропорційними вхідними сигналами; розширити область застосування CAP і САК обладнаних запропонованим пневматичним поршневим приводом в різних галузях пневмоавтоматики, працюючих переважно в умовах різкоперемінних вхідних сигналів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Пневматичний поршневий привод, що містить циліндр з торцевими кришкою і фланцем з розміщеним усередині виконавчим поршнем з вихідним штоком, зрівноважуючий протидіючий вантаж через тягу і двоплечий важіль, з'єднаний зі штоком, а також пневмолінію вихідного тиску, приєднану до кришки, який відрізняється тим, що в циліндрі додатково між виконавчим поршнем і кришкою установлені перший і другий, зв'язані між собою жорсткими тягами, рухомі поршні, з утворенням між кришкою і першим рухомим поршнем першої порожнини, сполученої з пневмолінією через додатково установлений дросель між рухомими першим, другим і виконавчим поршнями другої порожнини, сполученої безпосередньо, а третя порожнина між другим виконавчим рухомим поршнем і фланцем циліндра через отвори у фланці сполучена з атмосферою. 2 UA 119633 U Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F15B 15/00
Мітки: привод, поршневий, пневматичний
Код посилання
<a href="https://ua.patents.su/5-119633-pnevmatichnijj-porshnevijj-privod.html" target="_blank" rel="follow" title="База патентів України">Пневматичний поршневий привод</a>
Пневматичний гальмівний привод із запобіжним пристроєм
Номер патенту: 88970
Опубліковано: 10.12.2009
Автори: Гецович Євгеній Мойсейович, Рогозін Ігор Віталійович
МПК: B60T 13/00
Мітки: привод, гальмівний, пневматичний, пристроєм, запобіжним
Формула / Реферат:
Пневматичний гальмівний привод з запобіжним пристроєм, який містить послідовно з'єднані трубопроводами ресивери, багатосекційний пристрій та гальмівні камери, причому кожна секція богатосекцiйного пристрою утворює із пов'язаними з нею трубопроводами і гальмівними камерами окремий гальмівний контур, який відрізняється тим, що в початок кожного трубопроводу контуру гальмівного приводу, поблизу місця його підключення до секції багатосекційного...
Пневматичний привод систем гальмування мобільно-енергетичних засобів
Номер патенту: 61753
Опубліковано: 25.07.2011
Автори: Волинкін Микола Петрович, Дуганець Віктор Іванович, Майсус Василь Володимирович, Божок Аркадій Михайлович, Венгер Микола Анатолійович
МПК: A61D 19/02
Мітки: систем, привод, засобів, гальмування, пневматичний, мобільно-енергетичних
Формула / Реферат:
Пневматичний привод систем гальмування мобільно-енергетичного засобу, що містить джерело стисненого повітря, корпус, кришку і основну діафрагму, утворюючі порожнину безпосередньо сполучену з джерелом, пружину установлену між основною діафрагмою і корпусом і шток, з'єднуючий діафрагму з гальмом, який відрізняється тим, що він додатково обладнаний трьома, першою, центральною і периферійною, концентрично розміщеними діафрагмами, установленими в...
Диференціюючий пневматичний позиціонер систем автоматики

Номер патенту: 78760
Опубліковано: 25.03.2013
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
МПК: G05B 13/00, H02N 2/00
Мітки: позиціонер, систем, автоматики, пневматичний, диференціюючий
Формула / Реферат:
Диференціюючий пневматичний позиціонер систем автоматики, що містить корпус з пневмолінією тиску, підсилювач з клапанами, привід зі штоком, сполучений з підсилювачем, важіль, з'єднуючий шток привода з клапанами підсилювача і з рухомим фланцем приймального сильфона, утворюючого з корпусом порожнину, сполучену безпосередньо з пневмолінією тиску, який відрізняється тим, що в ньому додатково установлені другий сильфон, спільний рухомий фланець,...
Пневматичний позиціонер з подвійним диференціюванням вхідних сигналів
Номер патенту: 96054
Опубліковано: 12.01.2015
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
МПК: G05B 13/00
Мітки: подвійним, пневматичний, позиціонер, вхідних, сигналів, диференціюванням
Формула / Реферат:
Пневматичний позиціонер з подвійним диференціюванням вхідних сигналів, що містить корпус з пневмолінією тиску, привод зі штоком, сполучений з підсилювачем, важіль, з'єднуючий шток привода з клапанами підсилювача і з рухомим фланцем приймального сильфона, утворюючого з корпусом порожнину, сполучену безпосередньо з пневмолінією тиску, який відрізняється тим, що в ньому додатково установлені другий сильфон, загальний спільний рухомий фланець,...
Діафрагмовий пневматичний диференціатор

Номер патенту: 115387
Опубліковано: 10.04.2017
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: диференціатор, діафрагмовий, пневматичний
Формула / Реферат:
Діафрагмовий пневматичний диференціатор, що містить перетворювач сигналів з першою і другою порожнинами, утвореними першим і другим сильфонами, з'єднаними один з одним торцями рухомим спільним фланцем і установленими в напрямній, вузол приймання вхідних сигналів, сполучений через дросель з першою порожниною і через рухомий фланець з другою порожниною за допомогою гнучкого шлангу, другий торець другого сильфона з'єднаний з другим рухомим...
Попередній патент: Спосіб отримання сорбенту
Наступний патент: Пристрій для теплової обробки формованих кулінарних виробів без оболонки
Випадковий патент: Пристрій для транспортування та очистки коренебульбоплодів