Диференціатор привода робочого обладнання
Номер патенту: 121526
Опубліковано: 11.12.2017
Автори: Пукас Віталій Леонідович, Олексійко Сергій Леонідович, Майсус Василь Володимирович, Божок Аркадій Михайлович, Волинкін Микола Петрович, Дуганець Віктор Іванович

Формула / Реферат
Диференціатор привода робочого обладнання, що містить перетворювач сигналів з першою і другою порожнинами, між першим і другим поршнями установленими в основній напрямній, зв'язаній одним торцем з фланцем, а другим - з корпусом вузла приймання вхідних сигналів, порожнина якого сполучена зі штатним джерелом стискування робочої рідини машини, і перший підсумовуючий механізм, який відрізняється тим, що основна напрямна другим торцем з'єднана з кришкою, з гідролінією підведення робочої рідини, між якою і першим поршнем розміщена перша порожнина із вузлом приймання вхідних сигналів, друга порожнина розміщена між першим і другим поршнем, що переміщується в додатковій напрямній, зв'язаній з першим поршнем, і поршнем першого підсумовуючого механізму, який переміщується в першій напрямній втулці, з'єднаній з другим поршнем, третя порожнина розміщена між першим, другим і третім поршнями і поршнем другого додаткового підсумовуючого механізму, що переміщується в другій додатковій напрямній втулці, з'єднаній з третім поршнем, який зв'язаний з вихідним штоком і взаємодіє з одним торцем зворотної пружини, другий торець якої - з фланцем, причому з вузлом приймання вхідних сигналів перша порожнина сполучена через постійний дросель, друга порожнина через додаткові, розміщені в першій порожнині, гідролінії - безпосередньо, а порожнина між поршнями першого і другого підсумовуючих механізмів, третім поршнем і фланцем, через отвори в поршні другого підсумовуючого механізму, третьому поршні і фланці сполучена з атмосферою, при цьому перший поршень з поршнями підсумовуючих механізмів зв'язаний спільною жорсткою тягою.
Текст
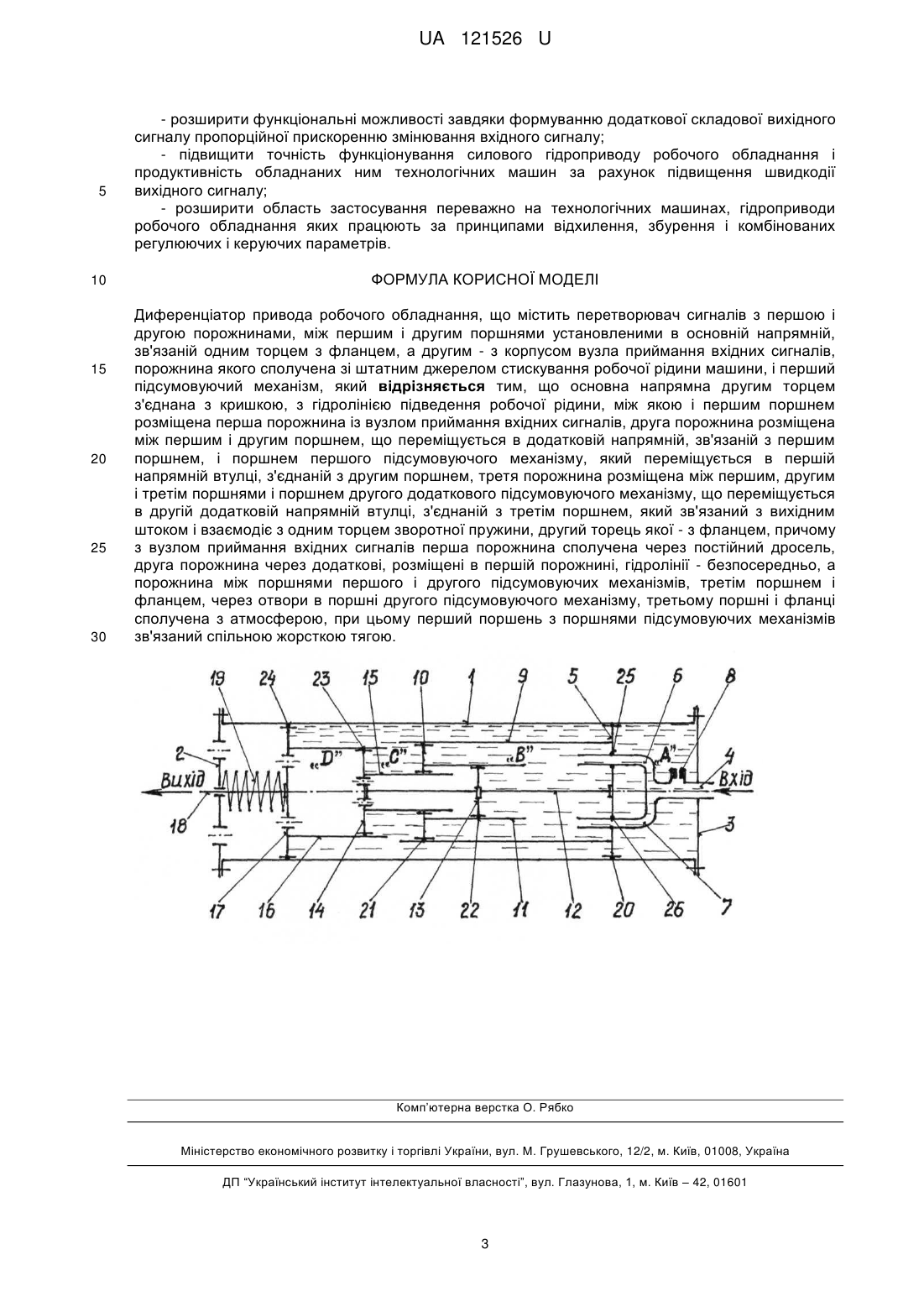
Реферат: Диференціатор привода робочого обладнання містить перетворювач сигналів з першою і другою порожнинами. Між першим і другим поршнями, встановленими в основній напрямній, зв'язаній одним торцем з фланцем, а другим - з корпусом вузла приймання вхідних сигналів. Порожнина якого сполучена зі штатним джерелом стискування робочої рідини машини, і перший підсумовуючий механізм. Основна напрямна другим торцем з'єднана з кришкою, з гідролінією підведення робочої рідини. Між гідролінією і першим поршнем розміщена перша порожнина із вузлом приймання вхідних сигналів. Друга порожнина розміщена між першим і другим поршнем, що переміщується в додатковій напрямній, зв'язаній з першим поршнем, і поршнем першого підсумовуючого механізму. Перший підсумовуючий механізм переміщується в першій напрямній втулці, з'єднаній з другим поршнем. Третя порожнина розміщена між першим, другим і третім поршнями і поршнем другого додаткового підсумовуючого механізму. Додатковий підсумовуючий механізм переміщується в другій додатковій напрямній втулці, з'єднаній з третім поршнем. Третій поршень зв'язаний з вихідним штоком і взаємодіє з одним торцем зворотної пружини, другий торець якої - з фланцем. З вузлом приймання вхідних UA 121526 U (12) UA 121526 U сигналів перша порожнина сполучена через постійний дросель. Друга порожнина через додаткові, розміщені в першій порожнині, гідролінії - безпосередньо. Порожнина між поршнями першого і другого підсумовуючих механізмів, третім поршнем і фланцем, через отвори в поршні другого підсумовуючого механізму, третьому поршні і фланці сполучена з атмосферою. Перший поршень з поршнями підсумовуючих механізмів зв'язаний спільною жорсткою тягою. UA 121526 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до засобів гідравлічного приводу переважно машин з підвищеною технічною швидкістю виконавчих органів робочого обладнання різних галузей народного господарства для більш ефективного їх використання. Найближчим аналогом до корисної моделі є диференціатор, що містить перетворювач вхідних сигналів з двома порожнинами, утвореними першим і другим рухомими поршнями, установленими в напрямній і зв'язаним з нею корпусом вузла приймання вхідних сигналів із розподілювальною порожниною, сполученою зі штатним джерелом стискування робочої рідини машини і через дросель з першою порожниною, а за допомогою додатково установлених жорстких гідроліній і порожнистого поршня з другою порожниною, а підсумовуючий механізм, виконаний у вигляді третього рухомого поршня, розміщеного усередині другої порожнини в напрямній втулці, з'єднаній з другим рухомим поршнем, причому поршень через додатково установлену систему важелів і тяг, виконану у вигляді жорсткої тяги, один кінець якої з'єднаний з третім поршнем, а другий кінець зв'язаний з одними плечами важелів, протилежні плечі яких з'єднані з порожнистим поршнем, а їх середні точки через жорсткі тяги - із першим рухомим поршнем (див. патент України № 1229779). Проте недоліком найближчого аналога є низька швидкість переміщення тяги вихідних сигналів, яка пропорційна тільки змінюванню вхідних сигналів і швидкості їх змінювання, що понижує швидкість руху виконавчих органів робочого обладнання технологічних машин, понижує ефективність їх використання і обмежує область застосування диференціатора в силових гідравлічних приводах. Отже, найближчий аналог через низьку швидкодію тяги вихідних сигналів понижує ефективність використання технологічних машин і має обмежену область застосування. В основу корисної моделі поставлена задача підвищити швидкодію вихідних сигналів і тим самим ефективність технологічних машин, а також розширити область застосування диференціатора, шляхом вдосконалення відомого диференціатора, суттєві ознаки якого полягають в тому, що вихідний з нього сигнал пропорційний змінюванню вхідного і швидкості (першій похідній) його змінювання, що додатково перетворюється в сигнал пропорційний прискоренню (другій похідній) змінювання вхідного сигналу, які далі гідравлічно підсумовуються, формуючи результативний вихідний сигнал підвищеної швидкодії, оскільки він буде вже пропорційний змінюванню вхідного, швидкості (першій похідній) і прискоренню (другій похідній) його змінювання. Поставлена задача вирішується тим, що диференціатор з перетворювачем вхідних сигналів з першою і другою порожниною, утвореними першим і другим поршнями, установленими в основній напрямній, зв'язаній одним торцем з фланцем, а другим торцем - з вузлом приймання вхідних сигналів, порожнина якого сполучена зі штатним джерелом стискування робочої рідини машини, і першим підсумовуючим механізмом, основна напрямна другим торцем зв'язана з кришкою з гідролінією підведення робочої рідини, з утворенням з першим поршнем першої порожнини із розміщеним у ній вузлом приймання вхідних сигналів. Друга порожнина утворена першим і другим поршнями, що переміщуються в основній і додатковій напрямній, остання з яких з'єднана з першим рухомим поршнем, і рухомим поршнем першого підсумовуючого механізму, що переміщується в першій напрямній втулці з'єднаній з другим рухомим поршнем. Третя порожнина утворена першим, другим і третім поршнями, що переміщуються в основній і додатковій напрямних, і поршнем другого підсумовуючого механізму, який переміщується в другій напрямній втулці, зв'язаній з третім поршнем, з'єднаним з вихідним штоком і взаємодіючим з одним торцем зворотної пружини, другий торець якої - з фланцем. З вузлом приймання вхідних сигналів перша порожнина сполучена через постійний дросель, друга порожнина через гідролінії - безпосередньо, а порожнина між поршнями першого і другого підсумовуючих механізмів, третім поршнем і фланцем через отвори в поршні другого підсумовуючого механізму, третьому поршні і фланці сполучена з атмосферою. При цьому перший поршень з поршнями першого і другого підсумовуючих механізмів зв'язаний спільною жорсткою тягою. В корисній моделі забезпечується можливість створити з двома першими похідними диференціатор, в якому сформований вихідний сигнал пропорційний змінюванню вхідного сигналу, швидкості (першій похідній) і прискоренню (другій похідній) його змінювання. Формування складової вихідного сигналу пропорційної прискоренню реалізується незначними змінами конструкції відомого, а величина введення її залежить від геометричних розмірів додатково залучених елементів. Отже, результуючий вихідний сигнал диференціатора приводу робочого обладнання буде складатися із наступних трьох сигналів, викликаних: - першого - змінюванням вхідного тиску робочої рідини; 1 UA 121526 U 5 10 15 20 25 30 35 40 45 50 55 60 - другого - швидкістю його змінювання; - третього - прискоренням його змінювання. При спрощеній конструкції і компактності диференціатора покращаться динамічні властивості привода, підвищиться швидкодія робочого обладнання і продуктивність технологічних машин, а також розшириться область його застосування. На представленому кресленні схематично показано загальний вигляд запропонованого диференціатора приводу робочого обладнання. Диференціатор містить основну циліндричну напрямну 1, зв'язану одним торцем з фланцем 2, а другим торцем - з кришкою 3 із гідролінією 4 підведення робочої рідини від джерела тиску (на схемі не показано). Усередині напрямної розміщений перетворювач сигналів з першим поршнем 5, утворюючий з кришкою 3 вузол приймання вхідних сигналів з розподілювальною першою порожниною "А", гідролініями 6,7 з'єднаними з поршнем 5 і постійним дроселем 8-3 гідролінією 4. До поршня 5 додатково приєднані перша напрямна 9, в якій переміщується другий рухомий поршень 10 з другою напрямною втулкою 11 і установлений в ній, зв'язаними спільною тягою 12 з третім поршнем 13 першого і четвертим поршнем 14 з третьою напрямною втулкою 15 другого підсумовуючого механізму. Поршень 14 переміщується в четвертій напрямній втулці 16, з'єднаній з третім поршнем 17, що переміщується в основній напрямній 1, зв'язаний з вихідним штоком 18, а також взаємодіє з одним торцем зворотної пружини 19, другий торець якої - з фланцем 2. Перша порожнина "А" між кришкою 3 і першим рухомим поршнем 5 сполучена з гідролінією 4 через дросель 8, друга порожнина "В" між першим 5, другим 10 і третім 13 поршнями сполучена через гідролінії 6, 7 безпосередньо, а третя порожнина "С" розміщена між поршнями 5, 10, 14 і 17. Четверта порожнина "D" між поршнями 13 першого і 14 другого підсумовуючих механізмів, третім 17 поршнем і фланцем 2 через отвори в поршнях 14, 17 і фланці 2 сполучена з атмосферою. Герметичність в з'єднаннях рухомих поршнів 5, 10, 13, 14, 17 з напрямними 1, 9, 11, 16 забезпечується ущільненнями 20, 21, 22, 23, 24, а поршнем 5 з гідролініями 6, 7 - ущільненнями 25, 26. Корисна модель працює наступним чином. У випадку різкого зростання вхідного сигналу, - тиску робочої рідини в гідролінії 4, вона через дросель 8 і гідролінії 6, 7 буде надходити в порожнини "А", "В". Від підвищеного тиску в порожнині "А" поршень 10 переміститься вліво, підвищуючи тиск в порожнині "С", під дією якого поршень 17, здолавши зусилля зворотної пружини 19, разом з вихідним штоком 18 переміститься на величину, пропорційну змінюванню вхідного сигналу. Але через наявність постійного дроселя 8 тиск в порожнині "А" буде наростати повільніше, ніж в порожнині "В" перетворювача, що викличе переміщення поршня 5 вправо і через тягу 12 - поршня 13, додатково підвищуючи тиск в порожнині "В", а переміщення поршня 10 вліво, ще додатково підвищить тиск у порожнині "С", під дією якого поршень 17 зі штоком 18 перемістяться ще на додаткову величину пропорційну швидкості змінювання вхідного сигналу. Крім цього через наявність жорсткого зв'язку між поршнями 5, 14 при переміщенні їх вправо відносно з меншою швидкістю викликає додаткове зменшення об'єму рідини в порожнині "С", а отже і додаткове збільшення в ній тиску. Останнє забезпечує поршню 17 і вихідному штоку 18 також додаткове переміщення на величину пропорційну прискоренню змінювання вхідного сигналу. Таким чином, абсолютне переміщення поршня 17 і вихідного штока 18 складається з трьох переміщень, тобто вихідний сигнал диференціатора привода робочого обладнання складається із переміщення, пропорційного змінювання вхідного сигналу, а також переміщень пропорційних швидкості і прискоренню змінювання вхідного сигналу. Це розширює функціональні можливості диференціатора, оскільки він становиться корегуючою пропорційно-диференціюючою (ППД) динамічною ланкою систем гідроавтоматики. У випадку, коли вхідний сигнал (тиск) робочої рідини в гідролінії 4 буде змінюватися повільно, перепад тисків в порожнинах "А", "В" буде практично відсутній. В результаті поршні 5, 10, 13, 23, 24 будуть переміщатися з однаковою швидкістю, а шток 18 буде переміщатися і передавати вихідний сигнал на робоче обладнання, викликаний тільки змінюванням вхідного сигналу. В цьому випадку запропонований диференціатор буде працювати як підсилювальна (П) корегуюча динамічна ланка. Застосування корисної моделі, порівняно з найближчим аналогом, дає можливість: - спростити конструкцію, зменшити матеріалоємність і забезпечити компактність в результаті заміни необхідних двох послідовно розміщених одноразових диференціаторів одним запропонованим; 2 UA 121526 U 5 10 15 20 25 30 - розширити функціональні можливості завдяки формуванню додаткової складової вихідного сигналу пропорційної прискоренню змінювання вхідного сигналу; - підвищити точність функціонування силового гідроприводу робочого обладнання і продуктивність обладнаних ним технологічних машин за рахунок підвищення швидкодії вихідного сигналу; - розширити область застосування переважно на технологічних машинах, гідроприводи робочого обладнання яких працюють за принципами відхилення, збурення і комбінованих регулюючих і керуючих параметрів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Диференціатор привода робочого обладнання, що містить перетворювач сигналів з першою і другою порожнинами, між першим і другим поршнями установленими в основній напрямній, зв'язаній одним торцем з фланцем, а другим - з корпусом вузла приймання вхідних сигналів, порожнина якого сполучена зі штатним джерелом стискування робочої рідини машини, і перший підсумовуючий механізм, який відрізняється тим, що основна напрямна другим торцем з'єднана з кришкою, з гідролінією підведення робочої рідини, між якою і першим поршнем розміщена перша порожнина із вузлом приймання вхідних сигналів, друга порожнина розміщена між першим і другим поршнем, що переміщується в додатковій напрямній, зв'язаній з першим поршнем, і поршнем першого підсумовуючого механізму, який переміщується в першій напрямній втулці, з'єднаній з другим поршнем, третя порожнина розміщена між першим, другим і третім поршнями і поршнем другого додаткового підсумовуючого механізму, що переміщується в другій додатковій напрямній втулці, з'єднаній з третім поршнем, який зв'язаний з вихідним штоком і взаємодіє з одним торцем зворотної пружини, другий торець якої - з фланцем, причому з вузлом приймання вхідних сигналів перша порожнина сполучена через постійний дросель, друга порожнина через додаткові, розміщені в першій порожнині, гідролінії - безпосередньо, а порожнина між поршнями першого і другого підсумовуючих механізмів, третім поршнем і фланцем, через отвори в поршні другого підсумовуючого механізму, третьому поршні і фланці сполучена з атмосферою, при цьому перший поршень з поршнями підсумовуючих механізмів зв'язаний спільною жорсткою тягою. Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 39/00, F16H 48/00, G06G 5/00
Мітки: диференціатор, обладнання, робочого, привода
Код посилання
<a href="https://ua.patents.su/5-121526-diferenciator-privoda-robochogo-obladnannya.html" target="_blank" rel="follow" title="База патентів України">Диференціатор привода робочого обладнання</a>
Диференціатор привода робочого обладнання
Номер патенту: 93802
Опубліковано: 10.10.2014
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: робочого, привода, обладнання, диференціатор
Формула / Реферат:
Диференціатор привода робочого обладнання, що містить перетворювач сигналів з першою і другою порожнинами, утвореними першим і другим сильфонами, з'єднаними один з одним торцями рухомим спільним фланцем і установленими в напрямній, вузол приймання вхідних сигналів, сполучений через дросель з першою порожниною і через рухомий фланець з другою порожниною за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим...
Диференціатор коливальних сигналів систем автоматики
Номер патенту: 120392
Опубліковано: 25.10.2017
Автори: Панцир Юрій Іванович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: сигналів, автоматики, коливальних, диференціатор, систем
Формула / Реферат:
Диференціатор коливальних сигналів систем автоматики, який відрізняється тим, що він містить порожнистий циліндричний корпус, з торцевими кришкою на вході і фланцем на виході, між якими послідовно розміщені гідравлічні гасник коливань, перетворювач погашених коливань вхідних сигналів з підсумовувачем вихідних сигналів, причому гасник включає прохідний через кришку шток вхідних сигналів із закріпленими на ньому першими з осьовими, для...
Поршневий гідропневмомеханічний диференціатор
Номер патенту: 86870
Опубліковано: 10.01.2014
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
Мітки: гідропневмомеханічний, диференціатор, поршневий
Формула / Реферат:
Поршневий гідропневмомеханічний диференціатор, що містить підсумовуючий механізм, вузол приймання вхідних сигналів з сильфоном, перетворювач сигналів з першим і другим сильфонами, з'єднаними одними торцями з першим рухомим фланцем і установленими в напрямній, перший сильфон з сильфоном вузла сполучений через регульований дросель, а другий сильфон - через рухомий фланець і гнучкий трубопровід, причому другий торець другого сильфона з'єднаний...
Диференціатор неелектричних сигналів
Номер патенту: 113507
Опубліковано: 25.01.2017
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: неелектричних, сигналів, диференціатор
Формула / Реферат:
Диференціатор неелектричних сигналів, що містить підсумовуючий механізм, спільний рухомий фланець сильфонів і вузол приймання вхідних сигналів, який відрізняється тим, що в ньому підсумовуючий механізм виконаний у вигляді другого сильфона, між яким і спільним першим рухомим фланцем додатково установлені нерухомий порожнистий фланець і проміжний сильфон, зв'язаний одним торцем із спільним рухомим фланцем, а протилежним торцем - з порожнистим...
Комбінований диференціатор
Номер патенту: 31232
Опубліковано: 25.03.2008
Автори: Божок Аркадій Михайлович, Понеділок Володимир Францович
МПК: G06G 5/00
Мітки: комбінований, диференціатор
Формула / Реферат:
Комбінований диференціатор, що містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями рухомим фланцем і установлені в напрямній, і вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, при цьому підсумовуючий механізм виконаний у вигляді сильфона, розміщеного...
Попередній патент: Витратний електрод для одержання зливка складнолегованного сплаву за допомогою електрошлакового переплаву
Наступний патент: Кабельний кран із змінною довжиною несучого каната
Випадковий патент: Огороджувальне кріплення для гірничих виробок