Диференціатор привода робочого обладнання
Номер патенту: 93802
Опубліковано: 10.10.2014
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
Формула / Реферат
Диференціатор привода робочого обладнання, що містить перетворювач сигналів з першою і другою порожнинами, утвореними першим і другим сильфонами, з'єднаними один з одним торцями рухомим спільним фланцем і установленими в напрямній, вузол приймання вхідних сигналів, сполучений через дросель з першою порожниною і через рухомий фланець з другою порожниною за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем і підсумовуючий механізм, а також штатне джерело стискування робочої рідини машини, який відрізняється тим, що в ньому дві порожнини перетворювача утворені першим і другим рухомими поршнями, установленими в напрямній і зв'язаними з нею, корпусом вузла приймання вхідних сигналів із розподілювальною порожниною, сполученою із штатним джерелом стискування робочої рідини машини, а за допомогою додатково установлених жорстких гідроліній і порожнистого поршня з другою порожниною, підсумовуючий механізм виконаний у вигляді третього рухомого поршня, розміщеного усередині другої порожнини в напрямній втулці, з'єднаній з другим рухомим поршнем, причому поршень через додатково установлену систему важелів і тяг виконаний у вигляді жорсткої тяги, один кінець якої з'єднаний з третім поршнем, а другий кінець зв'язаний з одними плечима важелів, протилежні плечі яких з'єднані з порожнистим поршнем, а їх середні точки через тяги - із рухомим поршнем.
Текст
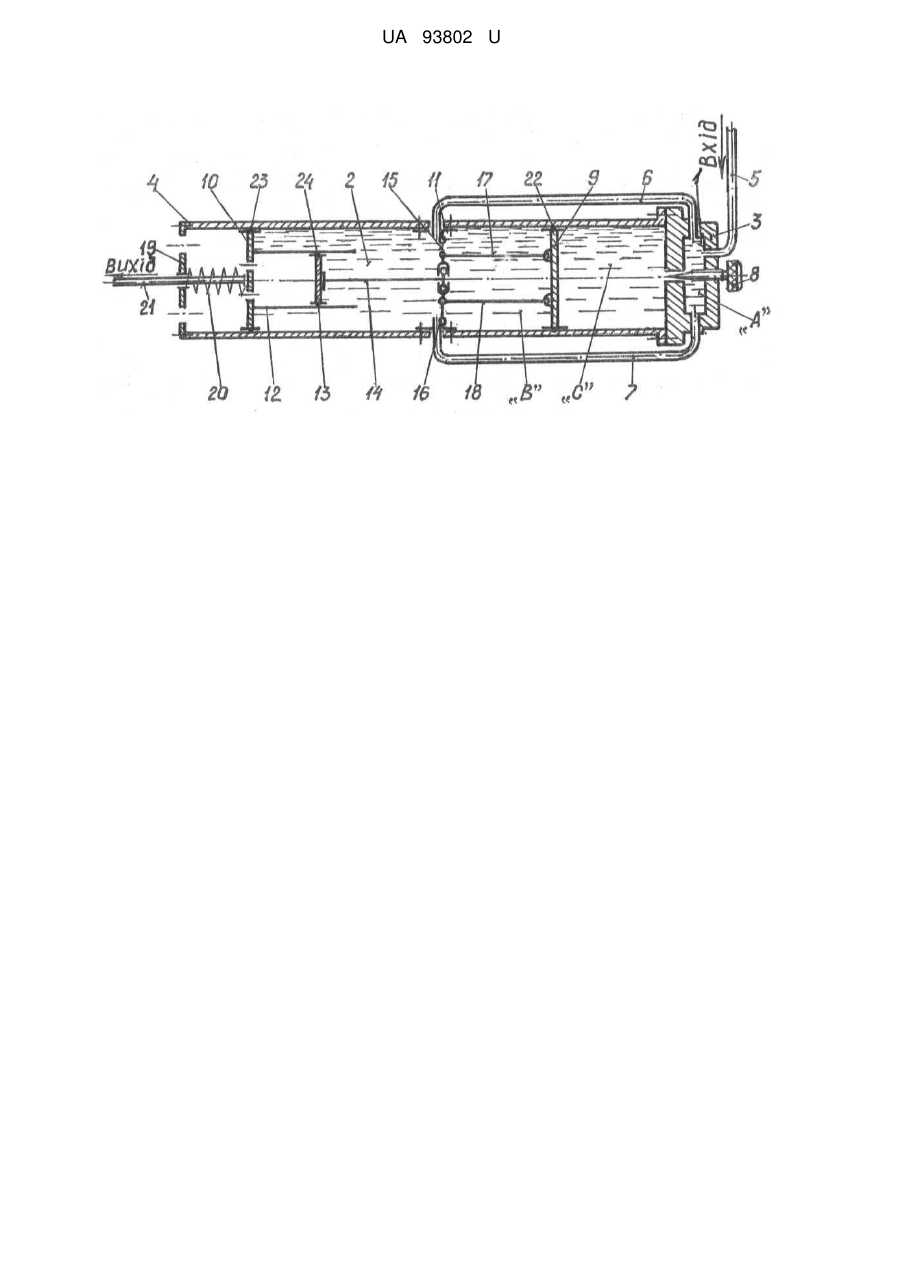
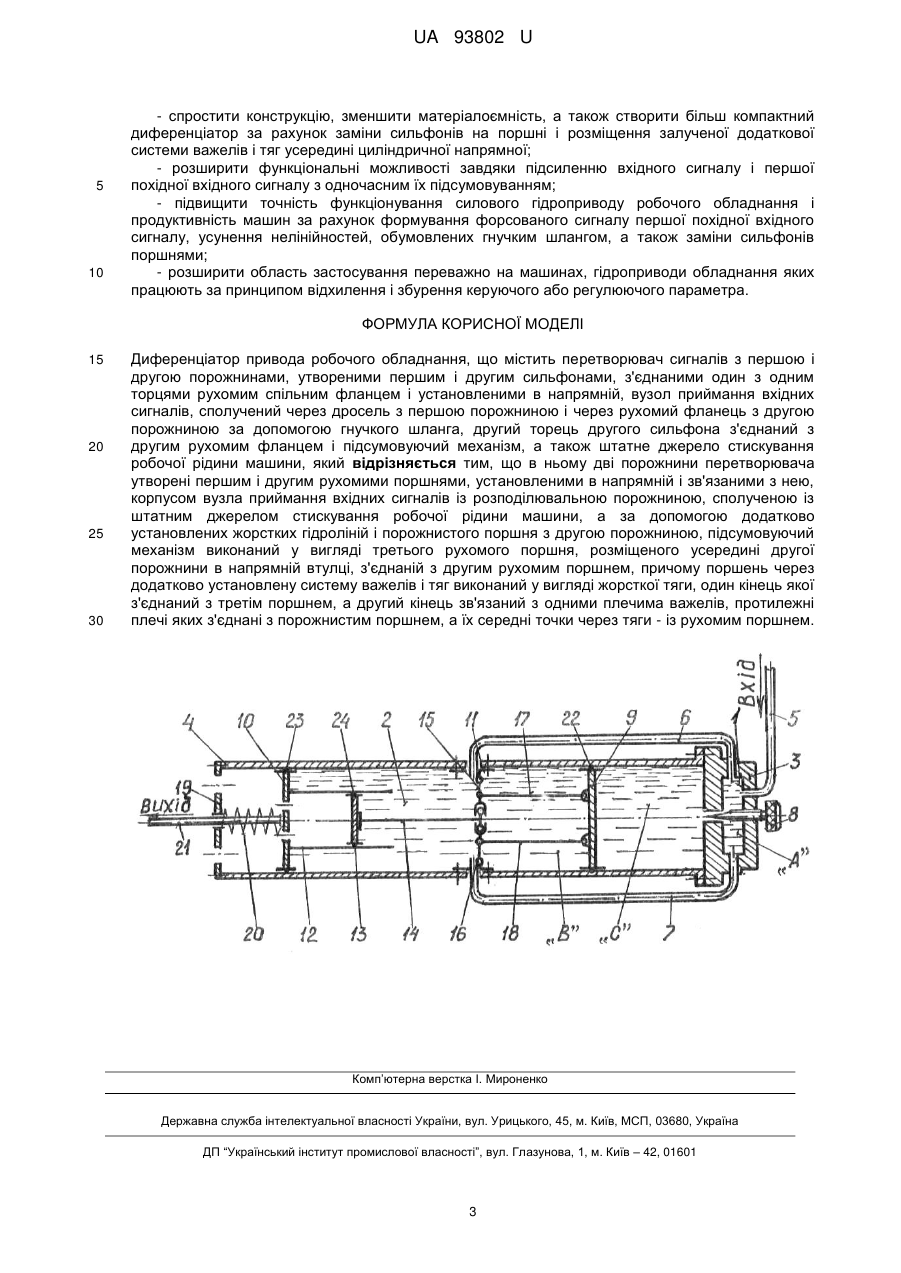
Реферат: Диференціатор привода робочого обладнання містить перетворювач сигналів з першою і другою порожнинами, утвореними першим і другим сильфонами, з'єднаними один з одним торцями рухомим спільним фланцем і установленими в напрямній, вузол приймання вхідних сигналів, сполучений через дросель з першою порожниною і через рухомий фланець з другою порожниною за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, і підсумовуючий механізм, а також штатне джерело стискування робочої рідини машини. Дві порожнини перетворювача утворені першим і другим рухомими поршнями, установленими в напрямній і зв'язаними з нею корпусом вузла приймання вхідних сигналів із розподілювальною порожниною, сполученою із штатним джерелом стискування робочої рідини машини, а за допомогою додатково установлених жорстких гідроліній і порожнистого поршня з другою порожниною. Підсумовуючий механізм виконаний у вигляді третього рухомого поршня, розміщеного усередині другої порожнини в напрямній втулці, з'єднаній з другим рухомим поршнем. Поршень через додатково установлену систему важелів і тяг виконаний у вигляді жорсткої тяги, один кінець якої з'єднаний з третім поршнем, а другий кінець зв'язаний з одними плечима важелів, протилежні плечі яких з'єднані з порожнистим поршнем, а їх середні точки через тяги - із рухомим поршнем. UA 93802 U (54) ДИФЕРЕНЦІАТОР ПРИВОДА РОБОЧОГО ОБЛАДНАННЯ UA 93802 U UA 93802 U 5 10 15 20 25 30 35 40 45 50 55 60 Диференціатор належить до елементів силового гідравлічного привода робочого обладнання і може бути використаний в меліоративних, будівельних, сільськогосподарських та інших машинах для підвищення їх продуктивності. Серед відомих, найбільш близьким за технічною суттю і реалізацією до заявлюваного, є диференціатор, що містить перетворювач з двома сильфонами, з'єднаними між собою спільним рухомим фланцем і установленими в напрямній, вузол приймання вхідних сигналів, сполучений через дросель з першим сильфоном і через рухомий фланець і гнучкий шланг з другим сильфоном, другий торець якого з'єднаний з другим рухомим фланцем, підсумовуючий механізм у вигляді сильфона, розміщеного усередині другого сильфона в напрямній втулці і зв'язаного одним торцем з другим рухомим фланцем другого сильфона, а другим торцем - із спільним рухомим фланцем сильфонів (див. авторське свідоцтво СРСР № 746565). Недоліком відомого диференціатора є недостатня потужність загальних вихідних сигналів і підсилення складової вихідних сигналів, пропорційної швидкості (першій похідній) змінювання вхідного сигналу, а також обмежена область застосування в силових гідравлічних приводах. Отже, відомий диференціатор має малі за потужністю і швидкістю вихідні сигнали, що обмежує продуктивність машин, а також область його застосування. Тому в основу корисної моделі поставлено задачу підвищити загальну потужність і швидкодію вихідних сигналів, і тим самим продуктивність машин, а також розширити область застосування диференціатора. З метою спрощення конструкції, покращення динамічних властивостей і розширення області застосування пропонується його удосконалення, суттєві ознаки якого полягають в тому, що при диференціюванні вхідного сигналу підсилюється, складова вихідного сигналу, пропорційна швидкості (першій похідній) його змінювання і гідравлічно підсумовуються підсилені вихідні сигнали. Для вирішення поставленої задачі в диференціаторі з підсумовуючим механізмом, перетворювачем з двома порожнинами, утвореними двома сильфонами, з'єднаними один з одним торцями рухомим спільним фланцем і установленими в напрямній, і вузлом приймання вхідних сигналів, сполученим через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, а підсумовуючий механізм виконаний у вигляді сильфона, розміщеного усередині другого сильфона в напрямній втулці і з'єднаного одним торцем з другим рухомим фланцем другого сильфона, а другим торцем через рухомий фланець із спільним рухомим фланцем першого і другого сильфонів, а також штатному джерелі стискування робочої рідини машини, в ньому дві порожнини перетворювача утворені першим і другим рухомими поршнями, установленими в напрямній, і зв'язаними з нею корпусом вузла приймання вхідних сигналів. Підсумовуючий механізм виконаний у вигляді третього рухомого поршня, розміщеного або усередині другої порожнини в напрямній втулці з'єднаній з другим рухомим поршнем, а третій поршень через додатково установлену систему важелів і тяг, виконану у вигляді жорсткої тяги, один кінець якої з'єднаний з ним, а другий кінець зв'язаний з одними плечима важелів, протилежні плечі яких з'єднані з додатково установленим порожнистим поршнем, а їх середні точки через тяги - із першим рухомим поршнем, причому вузол приймання вхідних сигналів виконаний у вигляді корпуса з розподілювальною камерою, сполученою зі штатним джерелом стискування робочої рідини приводу обладнання машини, а також із порожнинами перетворювача, з яких друга порожнина сполучена за допомогою жорстких гідроліній і порожнистого поршня безпосередньо, а перша порожнина - через регулювальний дросель. При такому технічному рішенні забезпечується можливість створити форсуючий за похідною диференціатор, в якому вихідний сигнал пропорційний швидкості (першій похідній) вхідного сигналу при проходженні через додатково залучену систему важелів і тяг ще додатково підсилюється на певну величину, яка залежить від співвідношення довжин плечей важелів, з'єднуючих жорстку тягу поршня диференціатора із спільним нерухомим порожнистим поршнем. Досягти такого підсилення шляхом змінювання настройки дроселя не представляється можливим, а при їх поєднанні можна досягти значного коефіцієнта підсилення по каналу введення в закон регулювання або керування похідної вхідного сигналу. Таким чином, результуючий сигнал на виході диференціатора привода робочого обладнання буде складатися із трьох сигналів, викликаних: - першого - змінюванням вхідного тиску робочої рідини; - другого - швидкістю його змінювання; - третього - підсиленням, системою важелів і тяг, сформованого сигналу першої похідної вхідного тиску робочої рідини привода робочого обладнання. 1 UA 93802 U 5 10 15 20 25 30 35 40 45 50 55 Все це, при спрощеній конструкції і компактності диференціатора, покращить динамічні властивості привода, підвищить швидкодію робочого обладнання і продуктивність машини, а також розширить область його застосування. На представленому кресленні схематично показано загальний вигляд запропонованого диференціатора привода робочого обладнання. Диференціатор містить вузол 1 приймальних сигналів і їх перетворювач 2. Вузол 1 включає нерухомий корпус 3 жорстко зв'язаний із циліндричною напрямною 4. В корпусі 3 розміщена розподілювальна порожнина "А" сполучена гідролінією 5 зі штатним (на схемі не показано) джерелом стискання робочої рідини машини, а гідролініями 6, 7 - із перетворювачем 2, а також установлений регулювальний дросель 8. Перетворювач сигналів включає, розміщений в напрямній 4, перший рухомий поршень 9 і другий рухомий поршень 10, між якими додатково установлений нерухомий порожнистий поршень 11. До поршня 10 приєднана циліндрична напрямна 12, в якій розміщений третій рухомий диференціюючий поршень 13. Поршень 13 із першим рухомим поршнем 9 зв'язаний через систему важелів і тяг, яка включає жорстку тягу 14, один кінець якої з'єднаний з поршнем 13, а другий кінець - з одними плечима важелів 15, 16, протилежні плечі яких зв'язані з порожнистим нерухомим поршнем 11, а їх середні точки через тяги 17, 18 із першим рухомим поршнем 9. Порожнина "В" диференціатора, утворена поршнями 9, 10, 11, 13, а також циліндричною напрямною 4 сполучена з розподілювальною порожниною "А" корпуса 3 гідролініями 6, 7 безпосередньо, а порожнина "С", утворена поршнем 9, корпусом 3 і циліндричною напрямною 4, - через голчастий регулювальний дросель 8. До циліндричної нерухомої напрямної 4 приєднаний з отворами фланець 19, який являється сідлом відновлювальної пружини 20, яка протилежним торцем впирається в другий рухомий поршень 10, забезпечуючи таким чином повернення його, зв'язаних з ним вихідної тяги 21 і робочого обладнання, у вихідне положення. Герметичність в з'єднаннях рухомі поршні 9, 10, 13 з напрямними 4, 12 забезпечується ущільненнями 22, 23, 24. Працює запропонований диференціатор наступним чином. При різкому збільшенні вхідного сигналу (тиску робочої рідини) в порожнині "А", через наявність дроселя 8, тиск у порожнині "С" буде наростати повільніше, ніж у порожнині "В" перетворювача 2. В результаті поршень 9 переміститься вправо і через тяги 17, 18 двоплечі важелі 15, 16 і тягу 14 форсовано перемістить за собою поршень 13, створюючи додатковий підсилений приріст тиску робочої рідини в порожнині "В", пропорційний коефіцієнту підсилення сигналів системою важелів і тяг, з'єднуючою поршні 9, 13. При цьому поршень 10 зв'язаний з тягою 21 вихідного сигналу одержить додаткове переміщення, внаслідок чого буде додаватися два переміщення, тобто вихідний сигнал диференціатора, від дії вхідного сигналу, буде складатися із переміщення, викликаного змінюванням вхідного сигналу (збільшення тиску в порожнині "А") і переміщення, викликаного підвищеною швидкістю (форсованою першою похідною, обумовленою різними швидкостями руху поршнів 9, 13) змінювання вхідного сигналу і додаткового збільшення через те тиску в порожнині "В". У випадку різкого пониження тиску в розподілювальній порожнині "А", описаний диференціатор буде працювати аналогічно з тією лише різницею, що вихідні переміщення рухомих поршнів і зв'язаних з ними деталей будуть направлені в протилежний бік. В описаних випадках диференціатор буде працювати як форсована підсилювально-форсованодиференціююча динамічна ланка, забезпечуючи поршню 10 і вихідній тязі зв'язаній з робочим обладнанням переміщення пропорційне змінювання вхідного сигналу і форсованій швидкості (першій похідній) його змінювання. У випадку повільного вхідного сигналу (тиску) у вузлі 1, тиск робочої рідини в порожнині "С" буде змінюватися повільно і перепад тисків в порожнинах "В", "С" практично буде відсутній, а рухомі поршні 9, 10, 13 будуть переміщатися з однаковою швидкістю. В результаті тяга 21 буде переміщатися і передавати вихідний сигнал на робоче обладнання, викликаний тільки змінюванням вхідного сигналу. В цьому випадку запропонований диференціатор буде працювати як підсилювальна динамічна ланка. Таким чином, запропонований форсований диференціатор за своїми функціональними можливостями являє собою підсилювально-форсовано-диференціюючу динамічну ланку. Застосування запропонованого диференціатора привода робочого обладнання, порівняно з уже відомим, дасть можливість: 2 UA 93802 U 5 10 - спростити конструкцію, зменшити матеріалоємність, а також створити більш компактний диференціатор за рахунок заміни сильфонів на поршні і розміщення залученої додаткової системи важелів і тяг усередині циліндричної напрямної; - розширити функціональні можливості завдяки підсиленню вхідного сигналу і першої похідної вхідного сигналу з одночасним їх підсумовуванням; - підвищити точність функціонування силового гідроприводу робочого обладнання і продуктивність машин за рахунок формування форсованого сигналу першої похідної вхідного сигналу, усунення нелінійностей, обумовлених гнучким шлангом, а також заміни сильфонів поршнями; - розширити область застосування переважно на машинах, гідроприводи обладнання яких працюють за принципом відхилення і збурення керуючого або регулюючого параметра. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 Диференціатор привода робочого обладнання, що містить перетворювач сигналів з першою і другою порожнинами, утвореними першим і другим сильфонами, з'єднаними один з одним торцями рухомим спільним фланцем і установленими в напрямній, вузол приймання вхідних сигналів, сполучений через дросель з першою порожниною і через рухомий фланець з другою порожниною за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем і підсумовуючий механізм, а також штатне джерело стискування робочої рідини машини, який відрізняється тим, що в ньому дві порожнини перетворювача утворені першим і другим рухомими поршнями, установленими в напрямній і зв'язаними з нею, корпусом вузла приймання вхідних сигналів із розподілювальною порожниною, сполученою із штатним джерелом стискування робочої рідини машини, а за допомогою додатково установлених жорстких гідроліній і порожнистого поршня з другою порожниною, підсумовуючий механізм виконаний у вигляді третього рухомого поршня, розміщеного усередині другої порожнини в напрямній втулці, з'єднаній з другим рухомим поршнем, причому поршень через додатково установлену систему важелів і тяг виконаний у вигляді жорсткої тяги, один кінець якої з'єднаний з третім поршнем, а другий кінець зв'язаний з одними плечима важелів, протилежні плечі яких з'єднані з порожнистим поршнем, а їх середні точки через тяги - із рухомим поршнем. Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюBozhok Arkadii Mykhailovych, Ponedilok Vadym Vitaliiovych
Автори російськоюБожок Аркадий Михайлович, Понедилок Вадим Витальевич
МПК / Мітки
МПК: G06G 5/00
Мітки: привода, робочого, обладнання, диференціатор
Код посилання
<a href="https://ua.patents.su/5-93802-diferenciator-privoda-robochogo-obladnannya.html" target="_blank" rel="follow" title="База патентів України">Диференціатор привода робочого обладнання</a>
Комбінований диференціатор
Номер патенту: 31232
Опубліковано: 25.03.2008
Автори: Божок Аркадій Михайлович, Понеділок Володимир Францович
МПК: G06G 5/00
Мітки: диференціатор, комбінований
Формула / Реферат:
Комбінований диференціатор, що містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями рухомим фланцем і установлені в напрямній, і вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, при цьому підсумовуючий механізм виконаний у вигляді сильфона, розміщеного...
Поршневий гідропневмомеханічний диференціатор
Номер патенту: 86870
Опубліковано: 10.01.2014
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
Мітки: диференціатор, гідропневмомеханічний, поршневий
Формула / Реферат:
Поршневий гідропневмомеханічний диференціатор, що містить підсумовуючий механізм, вузол приймання вхідних сигналів з сильфоном, перетворювач сигналів з першим і другим сильфонами, з'єднаними одними торцями з першим рухомим фланцем і установленими в напрямній, перший сильфон з сильфоном вузла сполучений через регульований дросель, а другий сильфон - через рухомий фланець і гнучкий трубопровід, причому другий торець другого сильфона з'єднаний...
Диференціатор божка а.м.

Номер патенту: 28690
Опубліковано: 25.12.2007
Автор: Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: а.м, диференціатор, божка
Формула / Реферат:
Диференціатор, що містить перетворювач з двома співвісними сильфонами, суміжні торці яких з'єднані з першим рухомим фланцем, другий торець першого сильфона з'єднаний з нерухомим фланцем і корпусом-напрямною, в якій розміщені перший і другий сильфони, а також перший підсумовуючий механізм, виконаний у вигляді третього сильфона, розміщеного коаксіально у другому сильфоні в напрямній втулці і з'єднаного одним торцем з третім рухомим фланцем...
Форсований диференціатор неелектричних сигналів
Номер патенту: 89809
Опубліковано: 25.04.2014
Автор: Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: диференціатор, неелектричних, форсований, сигналів
Формула / Реферат:
Форсований диференціатор неелектричних сигналів, що містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями рухомим фланцем і установлені в напрямній, і вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, який відрізняється тим, що в ньому додатково...
Диференціатор неелектричних сигналів
Номер патенту: 51414
Опубліковано: 12.07.2010
Автори: Понеділок Володимир Францович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: сигналів, диференціатор, неелектричних
Формула / Реферат:
Диференціатор неелектричних сигналів, що містить два сильфони, з'єднані один з одним торцями основним спільним рухомим фланцем і встановлені в напрямній, вузол прийому вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець - з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, підсумовуючий механізм, виконаний у вигляді сильфона в напрямній втулці і...
Попередній патент: Водогрійний котел
Наступний патент: Відцентровий генератор хмари заряджених аерозольних часток
Випадковий патент: Особлива горілка "холодний яр"