Пристрій для безконтактного вимірювання температури


Формула / Реферат
Пристрій для безконтактного вимірювання температури, що містить об'єктив, діафрагму, дзеркало, виконане у вигляді ввігнутого конуса з поверхнею, що відображає промені світлового потоку, інфрачервоний приймач, що являє собою циліндр, секції якого є окремими інфрачервоними сенсорами, виходи яких з'єднані відповідно зі вхідною шиною буферного регістра та зі вхідною шиною блока синхронізації, вихід якого через керований тактовий генератор підключений до першого входу блока підготовки даних, до входу комутатора, до входу генератора напруги та до входу дільника частоти, вихід якого з'єднаний з першим входом буферного регістра, з першим входом відеоконтрольного блока та з першим входом лічильника, вихід якого підключений до другого входу ключа, вихід якого з'єднаний зі входом крокового двигуна, вал якого зв'язаний з діафрагмою, вихідна шина буферного регістра підключена до вхідної шини комутатора, вихід якого з'єднаний з другим входом блока підготовки даних та з другим входом відеоконтрольного блока, третій і четвертий входи якого підключені відповідно до виходів першого і другого керованих підсилювачів, перші входи яких з'єднані з виходом генератора напруги, а другі входи підключені відповідно до першого і другого виходів постійного запам’ятовуючого пристрою (ПЗП), перша вхідна цифрова шина якого з'єднана з вихідною цифровою шиною лічильника, другий вхід якого підключений до першого виходу блока управління, другий вихід якого з'єднаний зі входом блока синхронізації, а третій вихід підключений до другого входу буферного регістра, вихід блока підготовки даних з'єднаний з колами ЕОМ, який відрізняється тим, що в нього введені блок обробки сигналу, блок обчислення та аналого-цифровий перетворювач (АЦП), причому вихідна шина буферного регістра підключена до вхідної шини блока обробки сигналу, вхід якого з'єднаний з виходом керованого тактового генератора, а вихід підключений до входу блока обчислення, вихід якого з'єднаний зі входом АЦП, цифрова вихідна шина якого підключена до другої вхідної цифрової шини ПЗП, вихід дільника частоти з'єднаний з першим входом ключа.
Текст
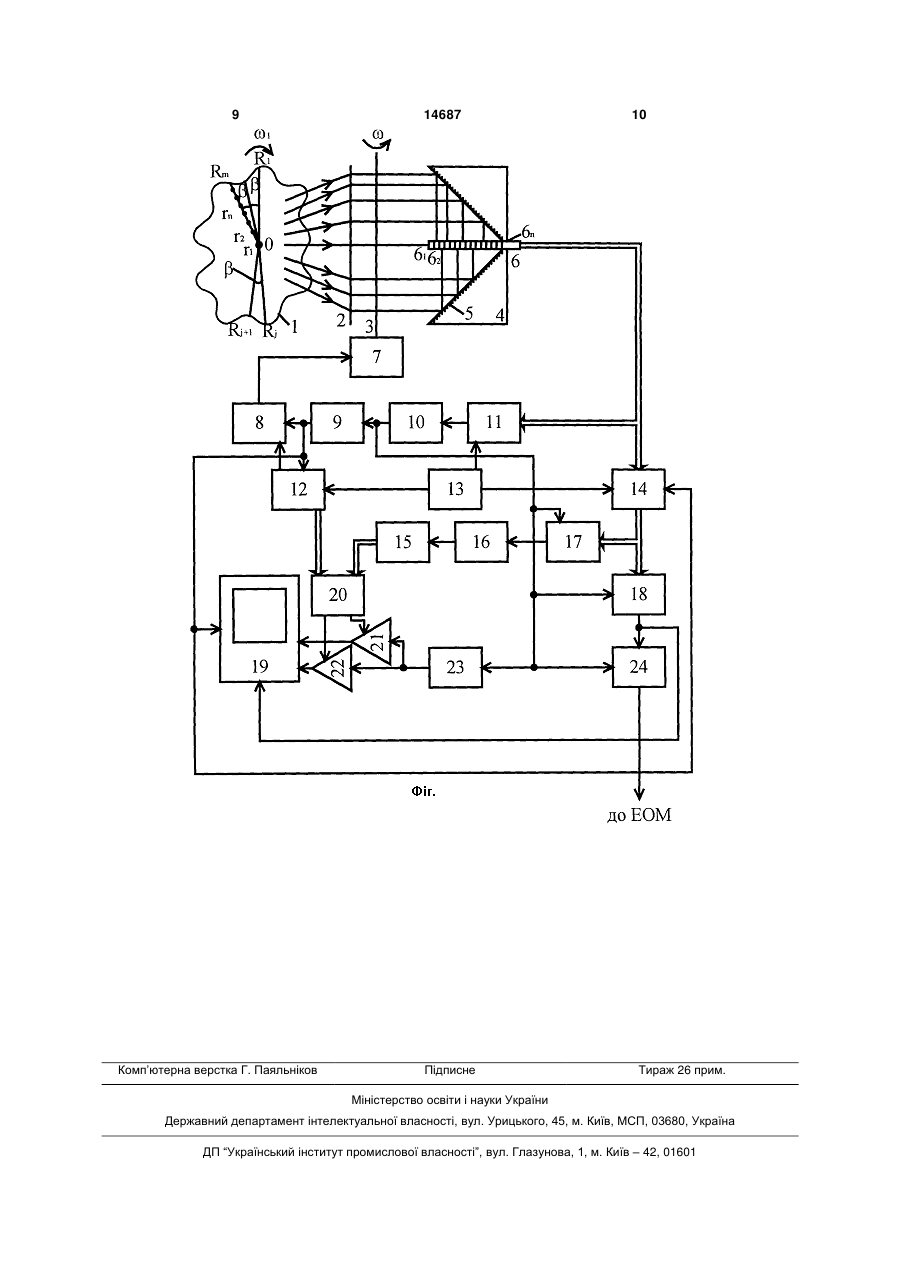
Пристрій для безконтактного вимірювання температури, що містить об'єктив, діафрагму, дзеркало, виконане у вигляді ввігнутого конуса з поверхнею, що відображає промені світлового потоку, інфрачервоний приймач, що являє собою циліндр, секції якого є окремими інфрачервоними сенсорами, виходи яких з'єднані відповідно зі вхідною шиною буферного регістра та зі вхідною шиною блока синхронізації, вихід якого через керований тактовий генератор підключений до першого входу блока підготовки даних, до входу комутатора, до входу генератора напруги та до входу дільника частоти, вихід якого з'єднаний з першим входом буферного регістра, з першим входом відеоконтрольного блока та з першим входом лічильника, вихід якого підключений до другого входу ключа, вихід якого з'єднаний зі входом крокового двигуна, вал якого зв'язаний з діафрагмою, вихідна шина буферного регістра підключена до U 2 (19) 1 3 14687 4 буферного регістра блока перетворення інформаливість коригування теплового портрета об'єкта ції (в подальшому - буферного регістра) та зі вхідконтролю у випадку, коли геометрична вісь приною шиною пристрою синхронізації блока управстрою не співпадає з геометричною віссю об'єкта ління і синхронізації (в подальшому - блока контролю, що дозволяє підвищити точність роботи синхронізації), вихід якого через керований тактопристрою. вий генератор блока управління і синхронізації (в Поставлена задача досягається тим, що в подальшому - керований тактовий генератор) підпристрій для безконтактного вимірювання темпеключений до першого входу блока підготовки даратури, що містить об'єктив, діафрагму, дзеркало, них для введення в ЕОМ (в подальшому - блока виконане у вигляді ввігнутого конуса з поверхнею, підготовки даних), до входу комутатора n входів на що відображає промені світлового потоку, інфраодин вихід блока перетворення інформації (в почервоний приймач, що являє собою циліндр, секції дальшому - комутатора), до входу генератора наякого є окремими інфрачервоними сенсорами, пруги, що змінюється ступінчасте, блока вимірювиходи яких з'єднані відповідно зі вхідною шиною вання (в подальшому - генератора напруги), до буферного регістра та зі вхідною шиною блока першого входу ключа блока управління і синхронісинхронізації, вихід якого через керований тактозації (в подальшому - ключа) та до входу дільника вий генератор підключений до першого входу блочастоти блока управління і синхронізації (в подака підготовки даних, до входу комутатора, до вхольшому - дільника частоти), вихід якого з'єднаний ду генератора напруги та до входу дільника з першим входом буферного регістра, з першим частоти, вихід якого з'єднаний з першим входом входом відеоконтрольного пристрою блока вимібуферного регістра, з першим входом відеоконтрювання (в подальшому - відеоконтрольного блорольного блока та з першим входом лічильника, ка) та з першим входом лічильника блока управвихід якого підключений до другого входу ключа, ління і синхронізації (в подальшому - лічильника), вихід якого з'єднаний зі входом крокового двигуна, вихід якого підключений до другого входу ключа, вал якого зв'язаний з діафрагмою, вихідна шина вихід якого з'єднаний зі входом крокового двигуна, буферного регістра підключена до вхідної шини вал якого зв'язаний з діафрагмою, вихідна шина комутатора, вихід якого з'єднаний з другим входом буферного регістра підключена до вхідної шини блока підготовки даних та з другим входом відеокомутатора, вихід якого з'єднаний з другим входом контрольного блока, третій і четвертий входи якого блока підготовки даних та з другим входом відеопідключені відповідно до виходів першого і другого контрольного блока, третій і четвертий входи якого керованих підсилювачів, перші входи яких з'єднані підключені відповідно до виходів першого і другого з виходом генератора напруги, а другі входи підккерованих підсилювачів блока вимірювання (в полючені відповідно до першого і другого виходів дальшому - керованих підсилювачів), перші входи ПЗП, перша вхідна цифрова шина якого з'єднана з яких з'єднані з виходом генератора напруги, а друвихідною цифровою шиною лічильника, другий гі входи підключені відповідно до першого і другого вхід якого підключений до першого виходу блока виходів постійного запам'ятовуючого пристрою управління, другий вихід якого з'єднаний зі входом (ПЗП) блока вимірювання (в подальшому -ПЗП), блока синхронізації, а третій вихід підключений до вхідна цифрова шина якого з'єднана з вихідною другого входу буферного регістра, вихід блока цифровою шиною лічильника, другий вхід якого підготовки даних з'єднаний з колами ЕОМ, введепідключений до першого виходу пристрою управно блок обробки сигнала, блок обчислення та анаління блока управління і синхронізації (в подальлого-цифровий перетворювач (АЦП), причому вишому - блока управління), другий вихід якого з'єдхідна шина буферного регістра підключена до наний зі входом блока синхронізації, а третій вихід вхідної шини блока обробки сигнала, вхід якого підключений до другого входу буферного регістра, з'єднаний з виходом керованого тактового генеравихід блока підготовки даних з'єднаний з колами тора, а вихід підключений до входу блока обчисЕОМ. лення, вихід якого з'єднаний зі входом АЦП, цифГоловним недоліком даного пристрою є те, що рова вихідна шина якого підключена до другої він не дозволяє коректно відображати тепловий вхідної цифрової шини ПЗП, вихід дільника частопортрет об'єкта контролю у випадку, коли геометти з'єднаний з першим входом ключа. ричні вісі пристрою та об'єкта контролю не співпаПристрій для безконтактного вимірювання тедають, тобто спостереження пристроєм провомператури пояснюється кресленням, на якому диться під певним кутом до поверхні об'єкта зображена його структурна схема. контролю, що знижує точність контролю вимірюНа схемі: 1 - об'єкт контролю; 2 - об'єктив; 3 вання теплового поля об'єкта контролю. Крім того, діафрагма; 4 - конусоподібне дзеркало з кутом при оскільки на кроковий двигун сигнал подається безвершині 90° з поверхнею 5; 6 - інфрачервоний посередньо з керованого тактового генератора, а приймач, що містить η окремих інфрачервоних не з дільника частоти блока управління і синхронісенсорів; 7 - кроковий двигун; 8 - ключ; 9 - дільник зації, то виведення інформації в блок вимірювання частоти; 10 - керований тактовий генератор; 11 проводиться із запізненням та виникає переповблок синхронізації; 12 - лічильник; 13 - блок управнення буферного регістра блока перетворення ління; 14 - буферний регістр; 15 - АЦП; 16 - блок інформації, що зменшує точність роботи приобчислення; 17 - блок обробки сигнала; 18 - комустрою. татор; 19 - відеоконтрольний блок; 20 - ПЗП; 21, 22 В основу корисної моделі поставлено задачу - перший та другий керовані підсилювачі; 23 - гестворення пристрою для безконтактного вимірюнератор напруги; 24 - блок підготовки даних, привання температури, в якому за рахунок введення чому виходи інфрачервоного приймача 6 з'єднані нових блоків та зв'язків між ними з'являється можвідповідно зі вхідною шиною буферного регістра 5 14687 6 14 та зі вхідною шиною блока синхронізації 11, льованого об'єкта в зручній для подальшої обробвихід якого через керований тактовий генератор ки формі. 10 підключений до першого входу блока підготовки Пристрій має три режими роботи. Перший реданих 24, до входу комутатора 18, до входу генежим роботи застосовується при дослідженні темратора напруги 23 та до входу дільника частоти 9, пературних полів потужних симетричних відносно вихід якого з'єднаний з першим входом буферного центра електроенергетичних об'єктів, що знахорегістра 14, з першим входом відеоконтрольного дяться в стані спокою, наприклад статорів електблока 19 та з першим входом лічильника 12, вихід ричних машин. якого підключений до другого входу ключа 8, вихід В цьому випадку блок управління 13 зупиняє якого з'єднаний зі входом крокового двигуна 7, вал роботу блока синхронізації 11, на виході керованоякого зв'язаний з діафрагмою 3, вихідна шина буго тактового генератора 10 формуються імпульси з ферного регістра 14 підключена до вхідної шини частотою fG, які поступають на дільник частоти 9, комутатора 18, вихід якого з'єднаний з другим вхощо має коефіцієнт ділення п. На виході останнього дом блока підготовки даних 24 та з другим входом формуються імпульсні сигнали з частотою чередувідеоконтрольного блока 19, третій і четвертий вання f, які через ключ 8 подаються на кроковий входи якого підключені відповідно до виходів пердвигун 7, частота обертання якого визначається шого 21 і другого 22 керованих підсилювачів, пер360 формулою ω=2 m f, де m , - мінімальний ші входи яких з'єднані з виходом генератора напруги 23, а другі входи підключені відповідно до першого і другого виходів ПЗП 20, перша вхідна цифрова шина якого з'єднана з вихідною цифровою шиною лічильника 12, другий вхід якого підключений до першого виходу блока управління 13, другий вихід якого з'єднаний зі входом блока синхронізації 11, а третій вихід підключений до другого входу буферного регістра 14, вихід блока підготовки даних 24 з'єднаний з колами ЕОМ, вихідна шина буферного регістра 14 підключена до вхідної шини блока обробки сигнала 17, вхід якого з'єднаний з виходом керованого тактового генератора 10, а вихід підключений до входу блока обчислення 16, вихід якого з'єднаний зі входом АЦП 15, цифрова вихідна шина якого підключена до другої вхідної цифрової шини ПЗП 20, вихід дільника частоти 9 з'єднаний з першим входом ключа 8. Запропонований пристрій працює так. Потік інфрачервоного випромінювання, що створюється поверхнею контрольованого об'єкта 1, що знаходиться на деякій відстані від оптичної системи пристрою, потрапляє на об'єктив 2, який перетворює його у випромінювання з променями, паралельними головній оптичній вісі. Перетворений таким чином потік падає на діафрагму 3, яка приводиться в рух кроковим двигуном 7. Діафрагма 3 являє собою непрозорий диск, в якому вирізано сектор, утворений двома променями з кутом між ними, рівний мінімальному кроку обертання крокового двигуна 7, частота обертання якого задається керованим тактовим генератором 10. Таким чином, на дзеркало 4, що виконано у вигляді ввігнутого конуса з поверхнею 5, що відбиває промені, потрапляє лише частина зображення контрольованого об'єкта 1. Випромінювання, що пройшло через секторний отвір діафрагми 3, приймається інфрачервоним приймачем 6, що виконаний у вигляді секціонованого циліндра. При цьому теплове зображення розбивається на η частин, кожна з яких приймається окремим сенсором 6і, де i 1, n , кожен з яких розташований в окремій секції інфрачервоного приймача 6. При обертанні діафрагми 3 навколо центра, який співпадає з головною оптичною віссю, сканується все теплове поле об'єкта контролю 1. При цьому розгортка є не неперервною, а дискретною за рахунок використання крокового двигуна 7. Це дає можливість отримати інформацію про тепловий стан контро кут повороту, що утворюється при подачі одного керуючого імпульсу на кроковий двигун 7. З такою ж частотою починає обертатися діафрагма 3, яка містить отвір у вигляді сектора. При цьому здійснюється кругова розгортка теплового зображення нерухомого контрольованого об’єкта 1. Електричні сигнали, амплітуди яких пропорційні температурі елементарних участків поверхні об'єкта (кількість таких участків може сягати N=n·m), з виходів інфрачервоних сенсорів інфрачервоного приймача 6 надходять у буферний регістр 14, який запам'ятовує інформацію в аналоговому вигляді на час 1 . Запис в буферний регістр 14 проводиться T f в момент надходження сигналу з виходу дільника частоти 9. Комутатором 18 здійснюється зчитування інформації з буферного регістра 14 з наступним її перетворенням із паралельного виду представлення в послідовний. Сформований таким чином сигнал з виходу комутатора 18 потрапляє на вхід відеоконтрольного блока 19 і на вхід блока підготовки даних 24, в якому він перетворюється в цифрову форму та приводиться до зручного виду передачі в ЕОМ. Генератор напруги 23, перший 21 та другий 22 керовані підсилювачі і ПЗП 20 призначені для формування сигналів розгортки відеоконтрольного блока 19. Сигнал частотою fG, що поступає на вхід генератора напруги 23, на виході приймає ступінчасту форму (містить n складових) і подається на входи першого 21 і другого 22 керованих підсилювачів, коефіцієнт підсилення яких задається вихідними сигналами ПЗП 20. При цьому коефіцієнти підсилення першого 21 та другого 22 керованих підсилювачів задаються так, що на їх виходах формуються сигнали, пропорційні Ri·sin j, та Ri·cos j відповідно, де Ri - радіус, j - кут координати елементарного участка поверхні контрольованого об'єкта 1 в полярній системі координат. При цьому i 0, n , j 0, m . На перший вхід ПЗП 20 сигнали надходять з лічильника 12, коефіцієнт перерахунку якого дорівнює m. В результаті на екрані відеоконтрольного блока 19 при наявності одного інформаційного сигналу, двох сигналів розгортки та сигналу з вихода дільника напруги 9 формується зображення, 7 14687 8 що відповідає тепловому полю контрольованого Зображення n точок контрольованого об'єкта об'єкта 1. 1, що знаходиться на одному радіусі, проектується У випадку, коли немає можливості сумістити через сектор діафрагми 3, яка обертається з часоптичну вісь пристрою та геометрична вісь об'єкта тотою, рівною частоті обертання об'єкта контролю. контролю, тобто, коли спостереження проводиться В цьому випадку пристрій працює аналогічно під певним кутом до геометричної вісі контрольопершому режиму, але кроковий двигун 7 привованого об'єкта, його тепловий портрет спотворюдить в рух діафрагму 3 з кутовою частотою, що ється і на екрані відеоконтрольного блока 19 завідповідає кутовій частоті обертання контрольовамість теплового портрета, що відповідає ного об'єкта 1, яка визначається блоком синхроніконцентричним колам, буде з'являтись еліпсоподізації 11, що формує відповідний сигнал для керобне зображення. Для компенсації такого спотвованого тактового генератора 10. рення пропонується наступний підхід. Зміна режиму роботи блока синхронізації 11 Відомо, що рівняння еліпса у Декартовій сисвідбувається з блока керування 13, який формує темі координат має вигляд відповідний керуючий сигнал. Також блок керуван2 2 ня 13 формує сигнал для зміни режиму роботи x y (1), 1 лічильника 12 для формування коефіцієнтів підси2 2 a b лення першого 21 і другого 22 керованих підсилювачів такими, що на екран відеоконтрольного блоде x, у - горизонтальна і вертикальна вісі сиска 19 виводиться розгортка, що здійснюється теми координат, а, b - горизонтальна і вертикальвздовж j-го радіуса кругової розгортки, тобто здійна напіввісі еліпса відповідно, причому а = R, де R снюється виведення теплового поля n точок конт- радіус кола контрольованого об'єкта. рольованого об'єкта 1, що лежать на одній прямій Перейдемо у полярну систему координат, ви(в одному секторі з кутом ). користавши формули Третій режим роботи пристрою застосовується x=r cosφ, для вимірювання теплового поля контрольованого (2), y=r·sin об'єкта 1, що обертається. При цьому пристрій працює аналогічно другому режиму роботи. Блок де r - "радіус" еліпса, - кут повороту радіуса управління 13 формує сигнал, що подається на r. вхід лічильника 12, на його виході, де формується Підставимо (2) в (1) та отримаємо вираз сигнал переноса і який з'єднаний з другим входом 1 b r cos ключа 8, формуються імпульси з періодом і (3) m f b2 r 2 sin 2 1 тривалістю , які поступають на ключ 8 і закриваОтже, тепер, маючи в будь-який момент часу f параметри кута повороту діафрагми, меншу нають його. піввісь еліпса b та відстань від центра еліпса до При цьому сканування контрольованого об'єкйого краю ("радіус" еліпса), можна відновити реата 1, що обертається, здійснюється спочатку льний радіус спотвореного кола. вздовж деякого радіуса Rj, кут між вибраним нуЦе реалізовано в блоці обробки сигнала 17, льовим напрямом та Rj дорівнює j·ß. Коли здійснеякий фіксує кут , параметри b і r та передає їх в но сканування n точок, що лежать на радіусі Rj, по блок обчислення 16, в якому за формулою (3) висигналу лічильника 12 ключ 8 припиняє роботу значається дійсний радіус спотвореного кола. 1 Вихідний сигнал блока обчислення 16 за докрокового двигуна 7 на період, що відповідає . f помогою АЦП 15 перетворюється в цифровий код і При цьому за цей час об'єкт контролю 1 повертапоступає на другий вхід ПЗП 20, формуючи при цьому скориговані коефіцієнти підсилення першого ється відносно діафрагми 3 на кут . Робота кро21 і другого 22 керованих підсилювачів, які відновкового двигуна 7 відновлюється і сканування уже люють розмір зображення при його виведенні на здійснюється вздовж радіуса Rj+1, кут між вибравідеоконтрольний блок 19. ним нульовим напрямом та Rj+1 стає рівним (j+l)· . Другий режим роботи пристрою використовуТак здійснюється кругова розгортка всього теплоється при вимірюванні теплового поля однієї або n вого зображення контрольованого об'єкта 1, що точок контрольованого об'єкта 1, що обертається обертається. навколо своєї вісі, наприклад ротора електричної машини. 9 Комп’ютерна верстка Г. Паяльніков 14687 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for contactless temperature measurement
Автори англійськоюHrabko Valentyn Volodymyrovych
Назва патенту російськоюУстройство для бесконтактного измерения температуры
Автори російськоюГрабко Валентин Владимирович
МПК / Мітки
МПК: G01K 13/00
Мітки: вимірювання, безконтактного, пристрій, температури
Код посилання
<a href="https://ua.patents.su/5-14687-pristrijj-dlya-bezkontaktnogo-vimiryuvannya-temperaturi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для безконтактного вимірювання температури</a>
Пристрій безконтактного вимірювання температури поверхні нагрітих тіл

Номер патенту: 61515
Опубліковано: 17.11.2003
Автори: Стефаненко Віталій Віталійович, Скубілін Міхаіл Дємьяновіч, Стефаненко Віталій Кузьмович, Скубілін Ігорь Міхайловіч
МПК: G01J 5/58, H01L 21/66
Мітки: безконтактного, пристрій, вимірювання, нагрітих, температури, поверхні, тіл
Формула / Реферат:
Пристрій безконтактного вимірювання температури поверхні нагрітих тіл, що містить вхід із прозорого в робочому спектральному діапазоні матеріалу оптичного зв'язку і датчик випромінювання нагрітого тіла, розташований у фокальній площині і на осі входу, який відрізняється тим, що в нього введені другий датчик (приймач) випромінювання, розташований у фокальній площині і симетрично з першим датчиком на оптичній осі входу, перший і другий...
Пристрій для вимірювання температури
Номер патенту: 45848
Опубліковано: 15.04.2002
Автор: Мамаєв Валерій Миколайович
Мітки: вимірювання, пристрій, температури
Формула / Реферат:
1. Пристрій для виміру температури, що містить термоелектричний перетворювач, підключений до входів першого і другого комутаторів, термоперетворювач опору, перший вивід якого підключений до входу першого комутатора і входу блока обмежувальних резисторів, другий вивід підключений до входу другого комутатора і другого виходу першого джерела живлення, керуючі входи першого і другого комутаторів з'єднані з блоком керування, перше джерело...
Пристрій для безконтактного вимірювання перепадів температури поверху шахтних об`єктів
Номер патенту: 11615
Опубліковано: 25.12.1996
Автори: Далькевич Володимир Михайлович, Чемерик Віктор Лук'янович, Дендюк Григорій Васильович
Мітки: вимірювання, об'єктів, температури, перепадів, пристрій, поверху, шахтних, безконтактного
Формула / Реферат:
Устройство для бесконтактного измерения перепадов температуры шахтных объектов, содержащее оптический телескоп со сферическим зеркалом, приемником излучения и узлом компенсации изменения температуры окружающей среды, соединенным с инвертирующим входом операционного усилителя, к выходу которого подключено отсчетное устройство, источник питания, подключенный к оптическому телескопическому и операционному усилителю, отличающееся тем, что,...
Пристрій для безконтактного вимірювання перепадів температури поверху шахтних об`єктів
Номер патенту: 11628
Опубліковано: 25.12.1996
Автори: Чемерик Віктор Лук'янович, Дендюк Григорій Васильович, Далькевич Володимир Михайлович
МПК: E21F 5/00
Мітки: об'єктів, пристрій, температури, поверху, шахтних, вимірювання, перепадів, безконтактного
Формула / Реферат:
Устройство для бесконтактного измерения перепадов температуры поверхности шахтных объектов по авт. св. № 1273603, отличающееся тем, что, с целью повышения точности и быстродействия процесса измерения, устройство снабжено металлической шторкой, четвертым переключателем и блоком памяти ошибки измерения, при этом металлическая шторка механически соединена с четвертым переключателем, выход блока памяти ошибки измерения через замыкающий...
Спосіб безконтактного вимірювання температури та пристрій для його здійснення
Номер патенту: 7482
Опубліковано: 29.09.1995
Автори: Чимісов Юрій Михайлович, Карпенко Василь Григорович, Горшунова Ніна Миколаївна, Іванник Геннадій Васильович
МПК: G01J 5/12
Мітки: температури, спосіб, здійснення, пристрій, вимірювання, безконтактного
Формула / Реферат:
1. Способ бесконтактного измерения температуры, заключающийся в том, что посредством первичного преобразователя поочередно принимают тепловое излучение контролируемого объекта с температурой Тх и два сигнала, уровень которых соответствует интенсивности излучения абсолютно черного тела при двух различных температурах T1 и Т3, преобразуют их в электрические сигналы соответственно Uх, U1 и U2, по соотношению которых определяют искомую...
Попередній патент: Компресор побутового холодильника, що працює на ізобутані
Наступний патент: Спосіб лікування вагітних із хронічним пієлонефритом