Шумовий спосіб вимірювання температури
Номер патенту: 16665
Опубліковано: 15.08.2006
Автори: Скрипник Юрій Олексійович, Шевченко Костянтин Леонідович, Лісовський Олександр Анатолійович
Формула / Реферат
Шумовий спосіб виміру температури, при якому встановлюють вимірювальний резистор у зоні вимірюваної температури та опорний резистор у термостаті з температурою плавлення льоду, отримують їх шумові напруги, які по черзі підсилюють у смузі частот теплових флуктуацій разом з власними шумами підсилювального тракту, квадратично детектують, усереднюють та роздільно запам'ятовують першу і другу постійні напруги, який відрізняється тим, що додатково замикають вимірювальний і опорний резистори з наступним запам'ятовуванням отриманої третьої постійної напруги, з якою по черзі порівнюють першу і другу постійні напруги, отримуємо першу та другу різницеві напруги, розмикають по черзі вимірювальний і опорний резистори, встановлюють відповідне значення опору додаткового резистора у ланцюзі зворотного зв'язку операційного підсилювача, подають першу різницеву напругу на операційний підсилювач через вимірювальний резистор, другу - через опорний резистор, з наступним підсиленням та отримують четверту та п'яту постійні напруги, які порівнюють між собою, а по отриманій різниці напруг визначають вимірювану температуру за шкалою Цельсія.
Текст
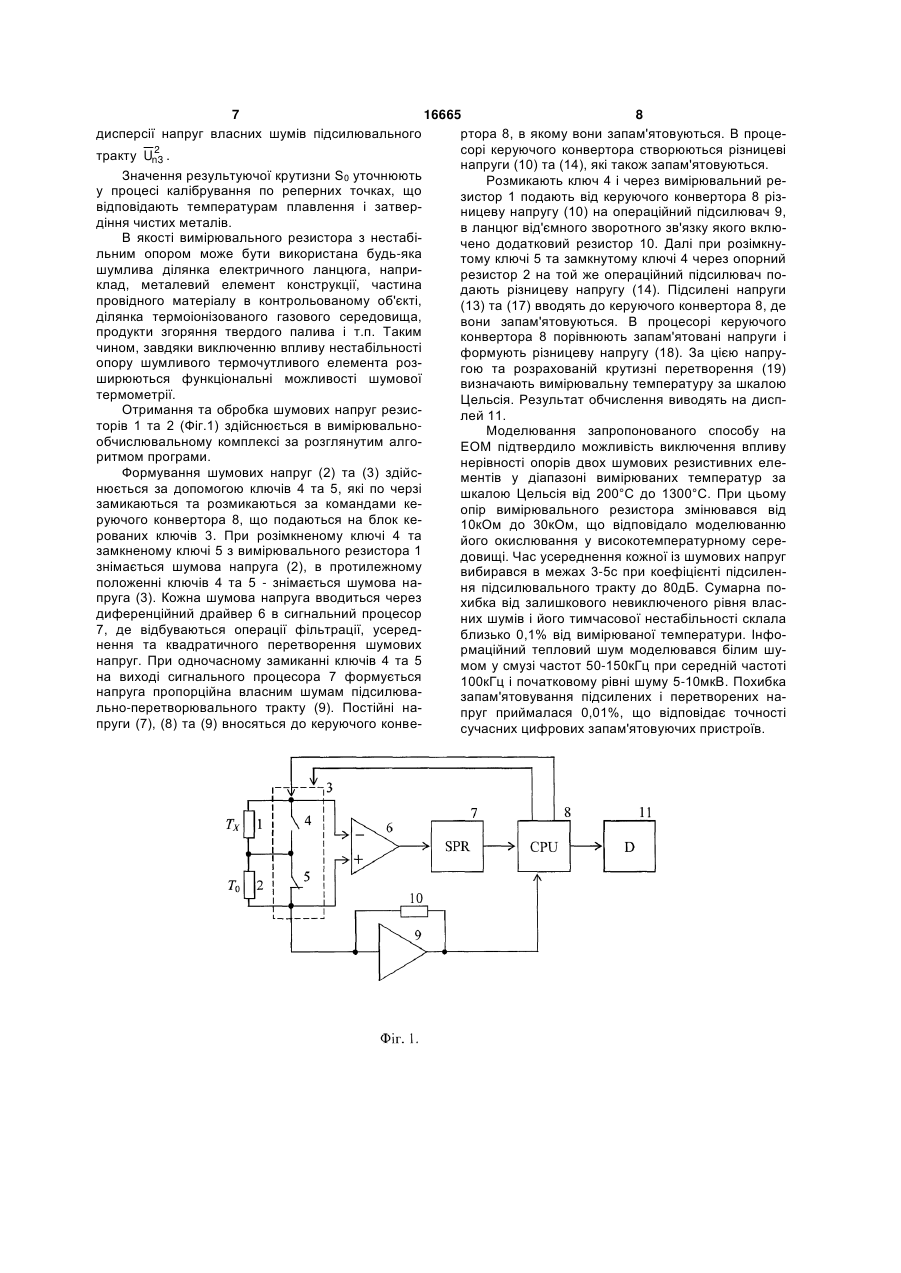
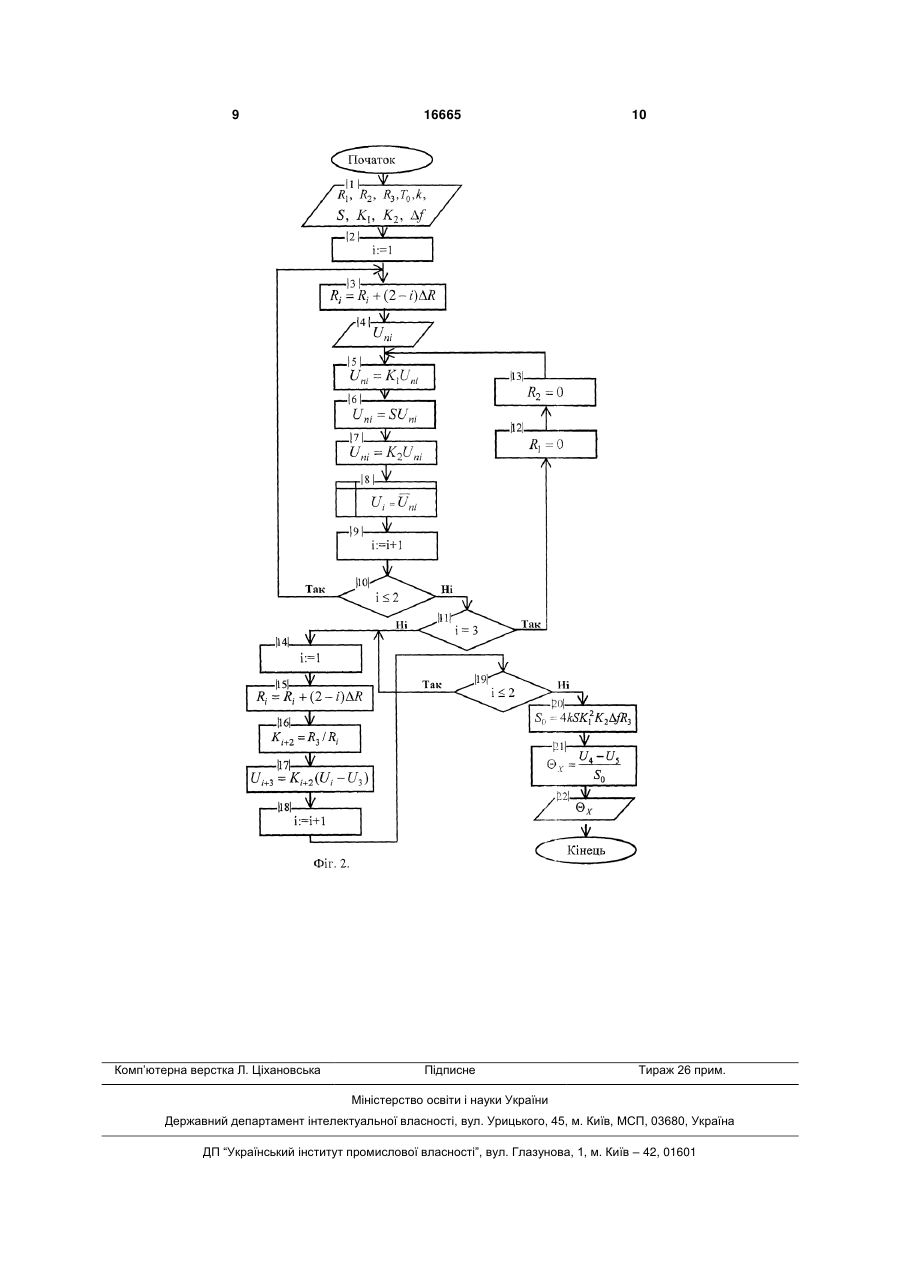
Шумовий спосіб вимірювання температури, при якому встановлюють вимірювальний резистор у зоні вимірюваної температури та опорний резистор у термостаті з температурою плавлення льоду, отримують їх шумові напруги, які по черзі підсилюють у смузі частот теплових флуктуацій разом з власними шумами підсилювального тракту, квадратично детектують, усереднюють та роз 3 16665 4 ни опору опорного резистора R2, що розташований раційний підсилювач через вимірювальний резису термостаті, до досягнення рівності значень шутор, другу - через опорний резистор, з наступним мових напруг при T0=const (TXR1=T0R2), що знижує підсиленням та отримують четверту та п'яту посточність вимірювання температури. тійні напруги, які порівнюють між собою, а по Відомий також шумовий спосіб вимірювання отриманій різниці напруг визначають вимірювану температури [див. Саватеев А.В. Шумовая термотемпературу за шкалою Цельсія. метрия, - Л.: Энергоатомиздат. Ленингр. отделеВведення в запропонований спосіб операцій ние, 1987, - C.60-62], який полягає в тім, що встапо запам'ятовуванню третьої напруги, пропорційновлюють вимірювальний резистор у зоні ної власним шумам підсилювальновимірюваної температури та опорний резистор у перетворюючого тракту, порівнянню першої і друтермостаті з температурою плавлення льоду, гої запам'ятованої напруг із третьою, отриманню отримують їх шумові напруги, які по черзі підсирізницевих напруг, які по черзі подають на опералюють у смузі частот теплових флуктуацій разом з ційний підсилювач із додатковим резистором у власними шумами підсилювального тракту, квадланцюзі зворотного зв'язку через вимірювальний і ратично детектують, усереднюють та роздільно опорний резистори, запам'ятовування четвертого і запам'ятовують першу і другу постійні напруги. п'ятого підсилених цим підсилювачем напруг, доКрім того, відомий спосіб включає операцію зволяє виключити вплив нестабільності опорів послаблення шумової напруги резистора з більш вимірювального й опорного резисторів на їхні шувисокою температурою нагрівання за допомогою мові напруги. Порівняння четвертої і п'ятої запарезистивного атенюатора. При цьому вимірювану м'ятованих напруг дозволяє одержати різницеву температуру ТX з урахуванням рівності порівнюванапругу, вільну від напруги власних шумів підсиних опорів (R1=R2) визначають по формулі: лювально-перетворювального тракту і пропорційну різниці температур вимірювального й опорного T0 TX , резисторів, що дозволяє з високою точністю по 2 різницевій напрузі розрахувати температуру в агде Т0 - температура опорного резистора; χ ресивних середовищах за шкалою Цельсія. коефіцієнт ослаблення атенюатором шумової наКорисна модель представлена на зображенпруги, що знімається з вимірювального резистора. нях, де Фіг.1 - шумовий вимірювач температури, Однак, власні шуми вимірювальноФіг.2 - алгоритм програми. перетворювального тракту спотворюють зазначеШумовий вимірювач температури містить вину залежність, що знижує точність вимірювання мірювальний резистор 1 та опорний резистор 2, які температури. Джерелом похибки також є неконтвключені послідовно, блок програмно керованих рольовані зміни опору вимірювального резистора, ключів 3 з ключами 4 та 5, які паралельно під'єдщо порушують умову рівності опорів вимірювальнані відповідно до вимірювального резистора 1 та ного й опорного резисторів. опорного резистора 2. До виходів блоку керованих В основу корисної моделі покладена задача ключів 3 підключений диференційний драйвер 6, створити такий шумовий спосіб вимірювання темвихід якого підключено до входу сигнального проператури, в якому введення нових операцій із шуцесора 7, вихід якого підключений до першого мовими напругами двох резисторів забезпечило б входу керуючого конвертора 8, перший вихід якого виключення впливу непостійності опору вимірювапідключений до керуючого входу блоку керованих льного резистора відносно опорного і рівня власключів 3, а другий вихід підключено до вимірюваних шумів підсилювального-перетворювального льного резистора 1 та опорного резистора 2. На тракту на результат порівняння температур резисдругий вхід керуючого конвертора 8 підключений торів, що дозволить підвищити точність вимірювихід операційного підсилювача 9 з додатковим вання температури в агресивних середовищах за резистором 10 в ланцюзі зворотного зв'язку. До шкалою Цельсія. входу операційного підсилювача 9 підключений Поставлена задача досягається тим, що в шувихід блоку керованих ключів 3. Третій вихід керумовий спосіб вимірювання температури, який поючого конвертора 8 підключений до дисплея 11. лягає в тім, що встановлюють вимірювальний реШумовий спосіб вимірювання температури зистор у зоні вимірюваної температури та опорний здійснюється наступним чином. резистор у термостаті з температурою плавлення У зоні вимірюваної температури ТX (за шкалою льоду, отримують їх шумові напруги, які по черзі Кельвіна) розміщають вимірювальний резистор 1 з підсилюють у смузі частот теплових флуктуацій номінальним опором R1. Опорний резистор 2 з разом з власними шумами підсилювального тракномінальним опором R2 розміщають у термостаті з ту, квадратично детектують, усереднюють та розтемпературою T0=273,15К (точка плавлення дільно запам'ятовують першу і другу постійні нальоду). пруги, згідно з корисною моделлю, додатково Першим кроком програми (Фіг.2) є введення замикають вимірювальний і опорний резистори з значень відомих величин: номінальних опорів винаступним запам'ятовуванням отриманої третьої мірювального R1 та опорного резистора R2, додатпостійної напруги, з якою по черзі порівнюють пекового резистора зворотного зв'язку R3 операційршу і другу постійні напруги, отримуємо першу та ного підсилювача 9, коефіцієнта підсилення другу різницеві напруги, розмикають по черзі вимішумової напруги К1, крутизни квадратичного детерювальний і опорний резистори, встановлюють ктування цієї напруги S коефіцієнта передачі усревідповідне значення опору додаткового резистора днюючої ланки К2, смуги частот теплових флуктуу ланцюзі зворотного зв'язку операційного підсиацій Δf та температури T0 опорного резистора. лювача, подають першу різницеву напругу на опеСередньоквадратичні напруги вимірювального 5 16665 6 і опорного резисторів відповідно до формули Найяку також запам'ятовують, повторення кроку 8. квіста визначаються виразами: Далі, першу запам'ятовану напругу U1 порівнюють із третьою запам'ятованою напругою U3 і , Un1 4k fR1TX (1) формують різницеву напругу: Un2 4k fR 2T0 , (2) U U SK 2K U 2 , (10) де Un1 і Un2 - середньоквадратичні напруги першого і другого резисторів; k - постійна Больцмана; Δf - смуга частот, у якій виміряється шумова напруга теплових флуктуацій. Номінальні опори вимірювального і опорного резисторів при нульовій температурі за шкалою Цельсія (273,15К) вибирають рівними (R1=R2=R) (крок 3 алгоритму). Однак у процесі вимірювання температури TX опір вимірювального резистора R1 змінюється через температурний коефіцієнт опору резистора і його деградації в агресивному середовищі. Тому шумова напруга вимірювального резистора: Un1 4k f R R TX , (3) де ΔR - неконтрольовані зміни опору вимірювального резистора. Наступним кроком алгоритму є визначення шумових напруг Un1 на вимірювальному та Un2 опорному резисторах. Шумові напруги (2) та (3) по черзі підсилюються одним підсилювально-перетворювальним трактом (крок 5 алгоритму) зі смугою пропущення Δf і невіддільним рівнем власних шумів, які у шумовій термометрії співрозмірні з інформаційними шумами порівнюваних резисторів. У результаті квадратичного детектування (крок 6) шумових напруг і їхнього усереднення (крок 7) формуються напруги виду: U1 2 SK1K 2 (Un1 Un3 )2 , (4) 2 (5) U1 SK1K 2 (Un2 Un3 )2 , де S - крутизна квадратичного детектування; К1 - коефіцієнт підсилення шумової напруги; К2 коефіцієнт передачі усреднюючої ланки; Un3 - середньоквадратична напруга власних шумів підсилювального тракту. При визначенні середніх значень напруг (4) і (5) варто врахувати, що шуми порівнюваних резисторів і шуми підсилювального тракту між собою не корельовані, що означає: (6) Un1Un3 0 , Un2Un3 0 , З урахуванням співвідношень (6) постійні складові напруг (4) і (5) будуть пропорційні тільки сумі дисперсій шумових напруг: 2 2 2 (7) U1 SK1K 2 Un1 Un3 , 2 2 2 (8) U1 SK1K 2 Un2 Un3 , Постійні напруги (7) і (8) роздільно запам'ятовуються (крок 8 алгоритму). Після запам'ятовування напруги (7) і (8) замикають вимірювальний і опорний резистори (R1=R2=0), за алгоритмом кроки 12, 13. Підсилюють у смузі частот теплових флуктуацій напругу власних шумів, що квадратично детектують і усереднюють. У результаті одержують третю постійну напругу: U3 2 2 SK1 K 2 Un3 , (9) 1 3 1 2 n1 Розмикають по черзі вимірювальний та опорний резистори (крок 15 алгоритму). Подають через вимірювальний резистор з опором R1=R+ΔR різницеву напругу (10) на операційний підсилювач із додатковим резистором R3 у ланцюзі від'ємного зворотного зв'язку. Коефіцієнт підсилення К3 такого підсилювача визначається вираженням (крок 16): R3 K3 , (11) R R Підсилена цим підсилювачем різницева напруга прийме вид (крок 17): 2 2 (12) U4 K 3 U1 U3 SK1K 2K 3 Un1 , Підставляючи у вираз (12) значення шумової напруги (3) з урахуванням (11), одержуємо четверту постійну напругу: 2 (13) U4 4kSK1K 2 fR3TX , яку запам'ятовують (крок 17). Другу запам'ятовану напругу U2 порівнюють із третім запам'ятованою напругою U3 й одержують різницеву напругу: 2 2 (14) U2 U3 SK1K 2Un2 , Подають різницеву напругу (14) через опорний резистор з опором R2=R на той же операційний підсилювач із додатковим резистором R3 у ланцюзі від'ємного зворотного зв'язку. Коефіцієнт підсилення К4 в цьому випадку буде визначатися опором опорного резистора (повторення кроків 15, 16): R3 K4 , (15) R Підсилена різницева напруга прийме вид (крок 17): 2 2 (16) U5 K 4 U2 U3 SK1K 2K 4 Un2 , З урахуванням виразів (2) і (16) одержуємо значення п'ятої постійної напруги: 2 (17) U5 4kSK1K 2 fR3T0 , яку також запам'ятовують (крок 17). Порівнюють четверту U4 і п'яту U5 напруги і визначають їхню різницю: 2 (18) U4 U5 4kSK1K 2 fR3 (TX T0 ) , Кроком 20 алгоритму визначають результуючу крутизну перетворення різницевої напруги в температуру [В/°С]: S0=ΔkSK12K1ΔfR3, (19) З різницевої напруги (18) визначають вимірювану температуру за шкалою Цельсія (крок 21 алгоритму): U4 U5 , (20) X TXT0 S0 де - вимірювана температура за шкалою Цельсія. З отриманого виразу (20) видно, що результат вимірювання не залежить від дійсних опорів вимірювального R1 й опорного R2 резисторів, а також 7 16665 8 дисперсії напруг власних шумів підсилювального ртора 8, в якому вони запам'ятовуються. В проце2 сорі керуючого конвертора створюються різницеві тракту Un3 . напруги (10) та (14), які також запам'ятовуються. Значення результуючої крутизни S0 уточнюють Розмикають ключ 4 і через вимірювальний реу процесі калібрування по реперних точках, що зистор 1 подають від керуючого конвертора 8 різвідповідають температурам плавлення і затверницеву напругу (10) на операційний підсилювач 9, діння чистих металів. в ланцюг від'ємного зворотного зв'язку якого вклюВ якості вимірювального резистора з нестабічено додатковий резистор 10. Далі при розімкнульним опором може бути використана будь-яка тому ключі 5 та замкнутому ключі 4 через опорний шумлива ділянка електричного ланцюга, наприрезистор 2 на той же операційний підсилювач поклад, металевий елемент конструкції, частина дають різницеву напругу (14). Підсилені напруги провідного матеріалу в контрольованому об'єкті, (13) та (17) вводять до керуючого конвертора 8, де ділянка термоіонізованого газового середовища, вони запам'ятовуються. В процесорі керуючого продукти згоряння твердого палива і т.п. Таким конвертора 8 порівнюють запам'ятовані напруги і чином, завдяки виключенню впливу нестабільності формують різницеву напругу (18). За цією напруопору шумливого термочутливого елемента розгою та розрахованій крутизні перетворення (19) ширюються функціональні можливості шумової визначають вимірювальну температуру за шкалою термометрії. Цельсія. Результат обчислення виводять на диспОтримання та обробка шумових напруг резислей 11. торів 1 та 2 (Фіг.1) здійснюється в вимірювальноМоделювання запропонованого способу на обчислювальному комплексі за розглянутим алгоЕОМ підтвердило можливість виключення впливу ритмом програми. нерівності опорів двох шумових резистивних елеФормування шумових напруг (2) та (3) здійсментів у діапазоні вимірюваних температур за нюється за допомогою ключів 4 та 5, які по черзі шкалою Цельсія від 200°С до 1300°С. При цьому замикаються та розмикаються за командами кеопір вимірювального резистора змінювався від руючого конвертора 8, що подаються на блок ке10кОм до 30кОм, що відповідало моделюванню рованих ключів 3. При розімкненому ключі 4 та його окислювання у високотемпературному серезамкненому ключі 5 з вимірювального резистора 1 довищі. Час усереднення кожної із шумових напруг знімається шумова напруга (2), в протилежному вибирався в межах 3-5с при коефіцієнті підсиленположенні ключів 4 та 5 - знімається шумова наня підсилювального тракту до 80дБ. Сумарна попруга (3). Кожна шумова напруга вводиться через хибка від залишкового невиключеного рівня власдиференційний драйвер 6 в сигнальний процесор них шумів і його тимчасової нестабільності склала 7, де відбуваються операції фільтрації, усередблизько 0,1% від вимірюваної температури. Інфонення та квадратичного перетворення шумових рмаційний тепловий шум моделювався білим шунапруг. При одночасному замиканні ключів 4 та 5 мом у смузі частот 50-150кГц при середній частоті на виході сигнального процесора 7 формується 100кГц і початковому рівні шуму 5-10мкВ. Похибка напруга пропорційна власним шумам підсилювазапам'ятовування підсилених і перетворених нально-перетворювального тракту (9). Постійні напруг приймалася 0,01%, що відповідає точності пруги (7), (8) та (9) вносяться до керуючого конвесучасних цифрових запам'ятовуючих пристроїв. 9 Комп’ютерна верстка Л. Ціхановська 16665 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюNoise method for measuring temperature
Автори англійськоюSkrypnyk Yurii Oleksiiovych, Shevchenko Kostiantyn Leonidovych, Lisovskyi Oleksandr Anatoliiovych
Назва патенту російськоюШумовой способ измерения температуры
Автори російськоюСкрипник Юрий Алексеевич, Шевченко Константин Леонидович, Лисовский Александр Анатольевич
МПК / Мітки
МПК: G01K 7/30
Мітки: спосіб, температури, шумовий, вимірювання
Код посилання
<a href="https://ua.patents.su/5-16665-shumovijj-sposib-vimiryuvannya-temperaturi.html" target="_blank" rel="follow" title="База патентів України">Шумовий спосіб вимірювання температури</a>
Пристрій для вимірювання швидкості та температури потоку
Номер патенту: 30477
Опубліковано: 15.11.2000
Автори: Шигера Ігор Юрійович, Івахів Орест Васильович
МПК: G01P 5/10
Мітки: температури, вимірювання, швидкості, пристрій, потоку
Формула / Реферат:
Пристрій для вимірювання швидкості та температури потоку, що містить високостабільний постійний резистор, з'єднаний нижнім виводом через перетворювач швидкості-температури з землею та виходом ключа, вхід керування якого з'єднано з виходом генератора опорної частоти, перший і другий підсилювачі змінного струму, відрізняється тим, що в нього додатково введено джерело змінного струму, джерело постійного струму, диференційний підсилювач,...
Спосіб вимірювання температури та пристрій для його здійснення
Номер патенту: 59763
Опубліковано: 15.09.2003
Автори: Яцук Юрій Васильович, Яцук Василь Олександрович
МПК: G01K 7/16
Мітки: спосіб, температури, здійснення, вимірювання, пристрій
Формула / Реферат:
1. Спосіб вимірювання температури, який полягає в тому, що вимірювальний діод поміщають в середовищі з вимірюваною температурою, подають на діод різну за значенням напругу живлення з полярністю, яка відкриває р-n перехід діода, і вимірюють спад напруги на діоді, пропорційний до вимірюваної температури, який відрізняється тим, що на діод подають три різні за значенням вимірювальні струми, які відкривають діод, за три проміжки часу, перший з...
Пристрій для вимірювання температури
Номер патенту: 45848
Опубліковано: 15.04.2002
Автор: Мамаєв Валерій Миколайович
Мітки: вимірювання, температури, пристрій
Формула / Реферат:
1. Пристрій для виміру температури, що містить термоелектричний перетворювач, підключений до входів першого і другого комутаторів, термоперетворювач опору, перший вивід якого підключений до входу першого комутатора і входу блока обмежувальних резисторів, другий вивід підключений до входу другого комутатора і другого виходу першого джерела живлення, керуючі входи першого і другого комутаторів з'єднані з блоком керування, перше джерело...
Пристрій для вимірювання температури
Номер патенту: 6843
Опубліковано: 31.03.1995
Автори: Мамаєв Валерій Миколайович, Лобачевський Георгій Степанович
МПК: G01K 7/16
Мітки: вимірювання, температури, пристрій
Формула / Реферат:
(57) Устройство для измерения температуры, содержащее термометр сопротивления, первый токовый вывод которого через сопротивление линии связи подключен к первому зажиму источника тока, операционный усилитель с резистором обратной связи, резистор сравнения, второй вывод которого соединен со вторым зажимом источника тока, а первый вывод резистора сравнения соединен через третий резистор с неинвертирующим входом операционного усилителя и через...
Спосіб вимірювання температури з застосуванням напівпровідникових датчиків, що мають p-n переходи
Номер патенту: 31120
Опубліковано: 15.12.2000
Автори: Плюта Ігор Васильович, Рибчак Володимир Костянтинович, Сташук Вадим Данилович
МПК: G01K 7/01
Мітки: датчиків, мають, застосуванням, температури, переході, напівпровідникових, вимірювання, спосіб
Текст:
.../2 . При цьому на р-п - переході формується імпульсна напруга, амплітуда якої дорівнює Vm = К, - V2 > яка згідно з (2) пропорційна температурі Т. Отже, для калібрування датчика достатньо виміряти амплітуду напруги на р-п - переході при одному опорному значенні температури Го , наприклад, взятому посередині діапазону вимірюваних температур,, щоб визначити коефіцієнт пропорційності між амплітудою вихідної напруги датчика і вимірюваною...
Попередній патент: Привід круглов’язальної машини
Наступний патент: Пристрій для захоплювання вантажу
Випадковий патент: Спосіб порогового паралельного алгебраїчного додавання тривалостей групи часових інтервалів