Акустичний пристрій для вимірювання швидкості вітру
Номер патенту: 21187
Опубліковано: 04.11.1997
Автори: Корецький Едуард Анатолійович, Альохін Володимир Іванович, Сидоров Генадій Іванович
Формула / Реферат
Акустическое устройство для измерения скорости ветра, содержащее последовательно соединенные задающий генератор и усилитель мощности, к выходу которого подключена передающая антенна, три приемных канала, каждый из которых состоит из последовательно соединенных приемной антенны, усилителя и спектроанализатора, первое вычислительное устройство, три входа которого соединены с выходами спектроанализаторов соответственно, индикаторное устройство, первый вход которого соединен с выходом первого вычислительного устройства, синхронизатор, выходы которого соединены со входом задающего генератора, входами трех спектроанализаторов и первого вычислительного устройства соответственно, а также со вторым входом индикаторного устройства, отличающееся тем, что в него дополнительно введено второе вычислительное устройство, первый вход которого соединен с выходом первого вычислительного устройства, второй вход - с выходом синхронизатора соответственно, а выход подключен к оперативной памяти первого вычислительного устройства.
Текст
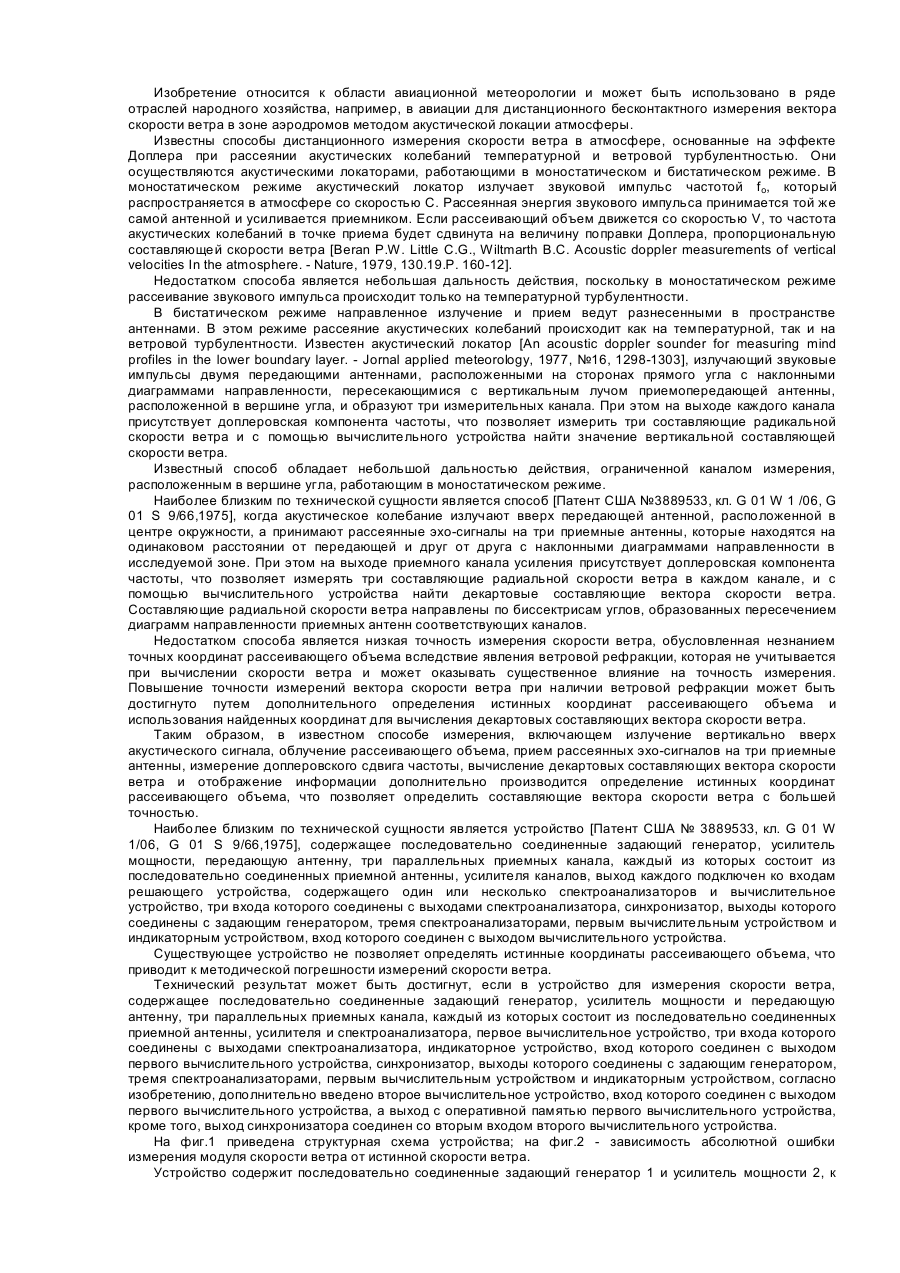
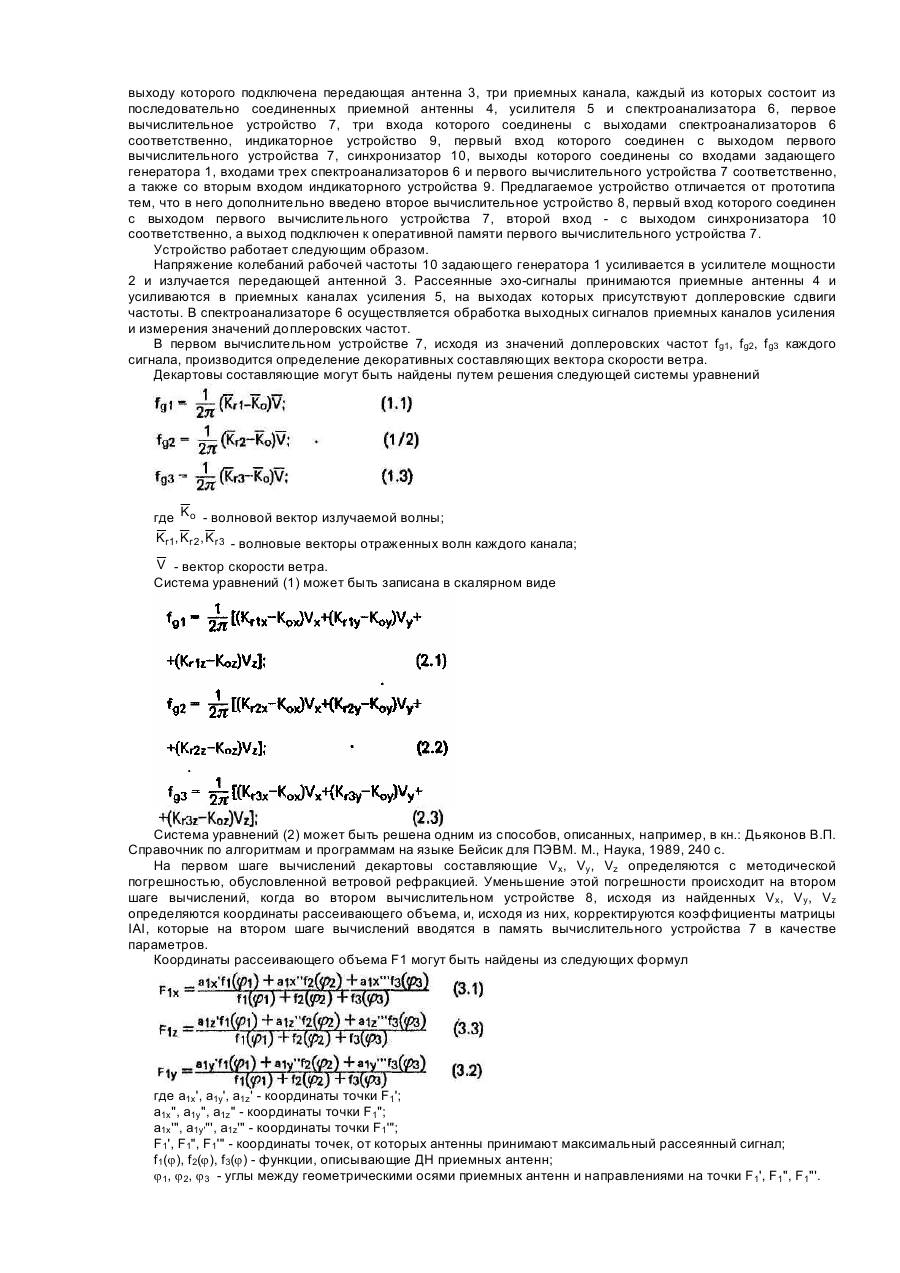
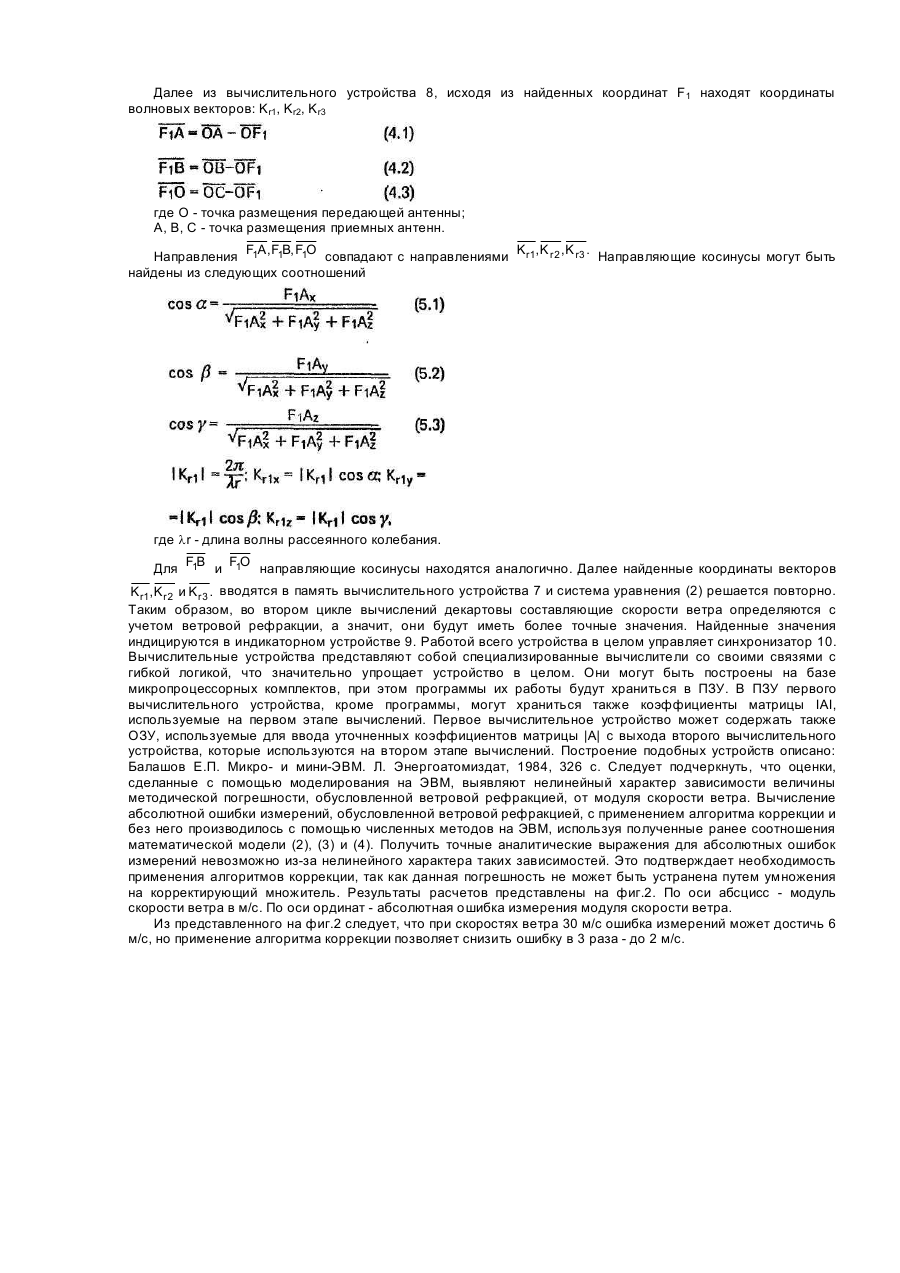
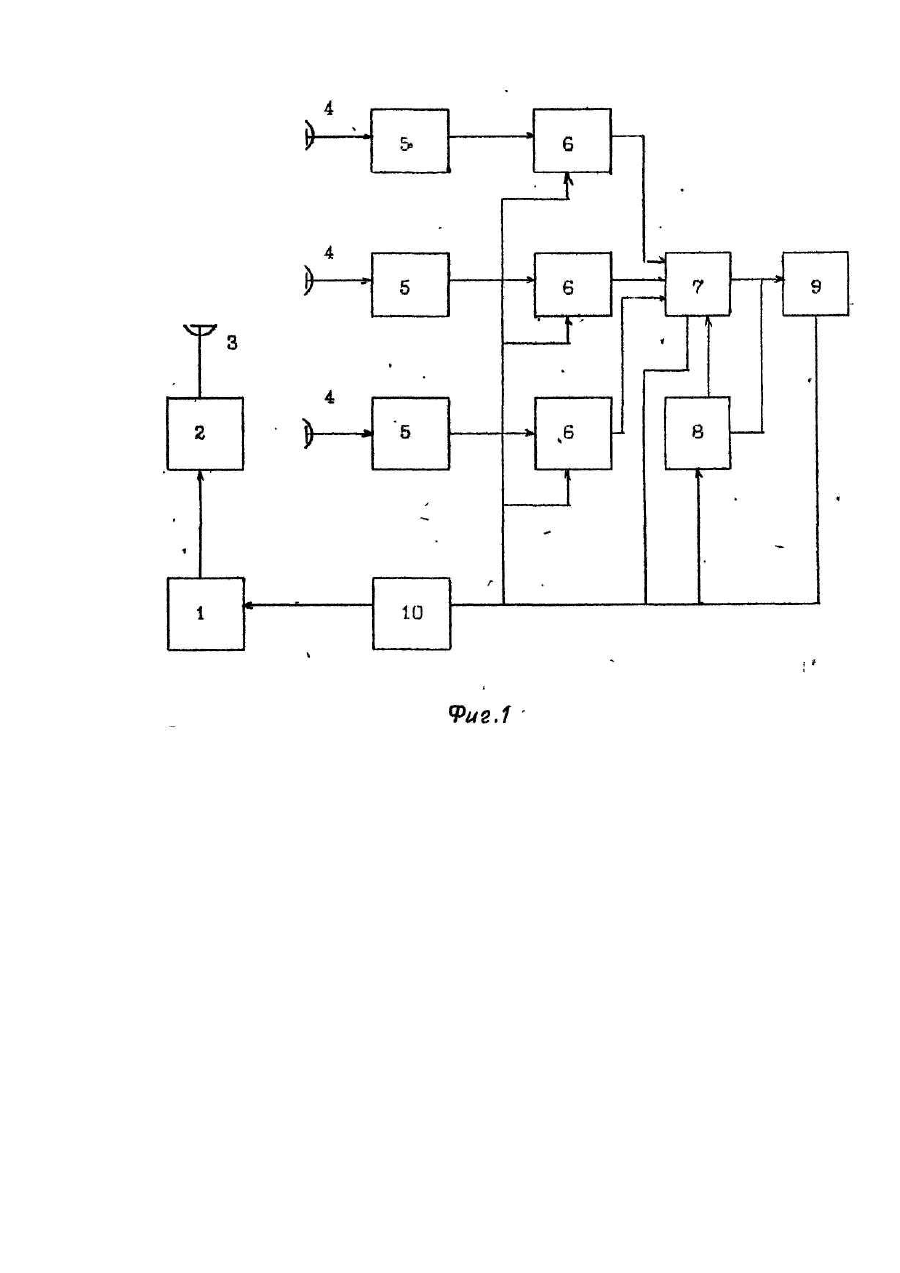
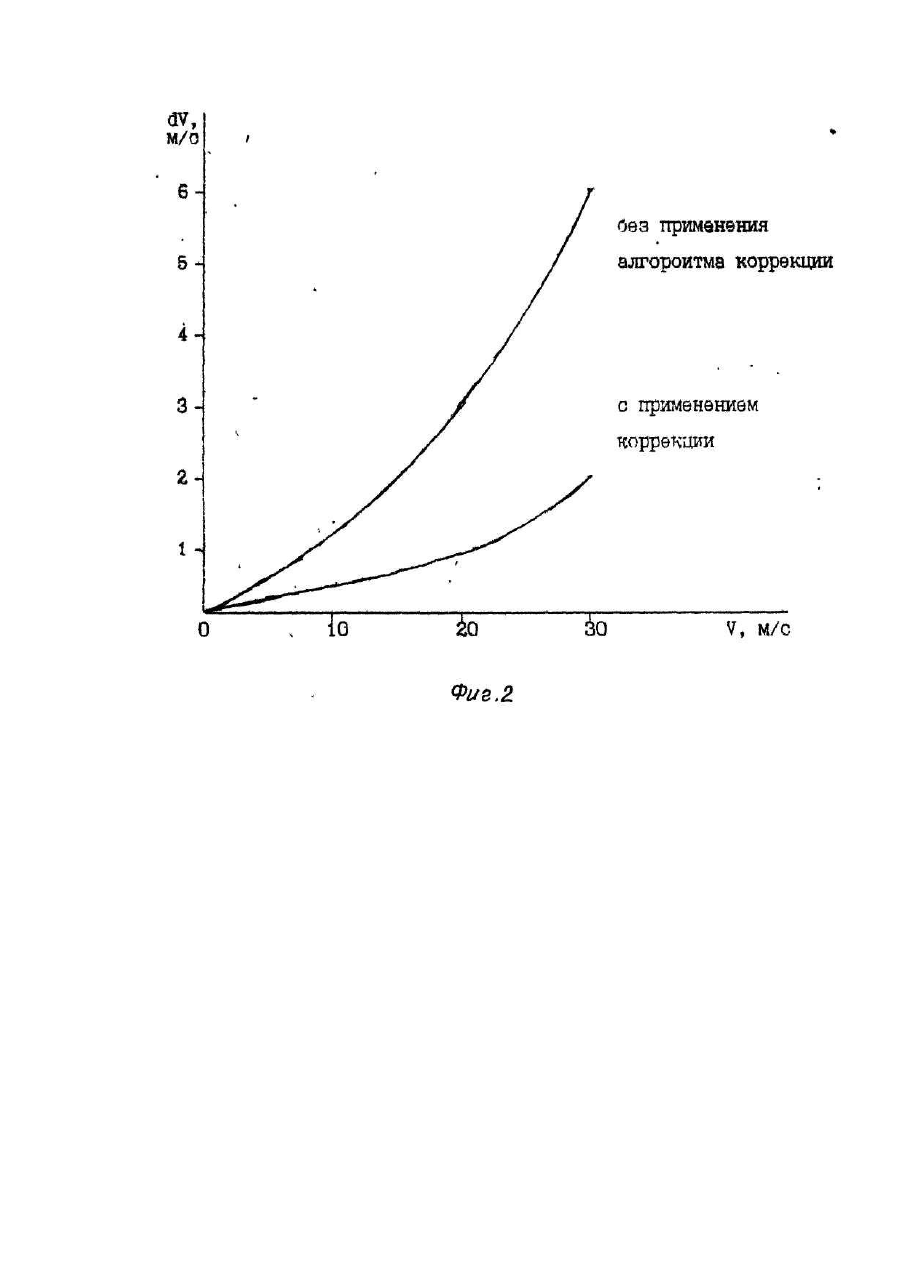
Изобретение относится к области авиационной метеорологии и может быть использовано в ряде отраслей народного хозяйства, например, в авиации для дистанционного бесконтактного измерения вектора скорости ветра в зоне аэродромов методом акустической локации атмосферы. Известны способы дистанционного измерения скорости ветра в атмосфере, основанные на эффекте Доплера при рассеянии акустических колебаний температурной и ветровой турбулентностью. Они осуществляются акустическими локаторами, работающими в моностатическом и бистатическом режиме. В моностатическом режиме акустический локатор излучает звуковой импульс частотой f o, который распространяется в атмосфере со скоростью С. Рассеянная энергия звукового импульса принимается той же самой антенной и усиливается приемником. Если рассеивающий объем движется со скоростью V, то частота акустических колебаний в точке приема будет сдвинута на величину поправки Доплера, пропорциональную составляющей скорости ветра [Beran P.W. Little C.G., Wiltmarth B.C. Acoustic doppler measurements of vertical velocities In the atmosphere. - Nature, 1979, 130.19.P. 160-12]. Недостатком способа является небольшая дальность действия, поскольку в моностатическом режиме рассеивание звукового импульса происходит только на температурной турбулентности. В бистатическом режиме направленное излучение и прием ведут разнесенными в пространстве антеннами. В этом режиме рассеяние акустических колебаний происходит как на температурной, так и на ветровой турбулентности. Известен акустический локатор [An acoustic doppler sounder for measuring mind profiles in the lower boundary layer. - Jornal applied meteorology, 1977, №16, 1298-1303], излучающий звуковые импульсы двумя передающими антеннами, расположенными на сторонах прямого угла с наклонными диаграммами направленности, пересекающимися с вертикальным лучом приемопередающей антенны, расположенной в вершине угла, и образуют три измерительных канала. При этом на выходе каждого канала присутствует доплеровская компонента частоты, что позволяет измерить три составляющие радикальной скорости ветра и с помощью вычислительного устройства найти значение вертикальной составляющей скорости ветра. Известный способ обладает небольшой дальностью действия, ограниченной каналом измерения, расположенным в вершине угла, работающим в моностатическом режиме. Наиболее близким по технической сущности является способ [Патент США №3889533, кл. G 01 W 1 /06, G 01 S 9/66,1975], когда акустическое колебание излучают вверх передающей антенной, расположенной в центре окружности, а принимают рассеянные эхо-сигналы на три приемные антенны, которые находятся на одинаковом расстоянии от передающей и друг от друга с наклонными диаграммами направленности в исследуемой зоне. При этом на выходе приемного канала усиления присутствует доплеровская компонента частоты, что позволяет измерять три составляющие радиальной скорости ветра в каждом канале, и с помощью вычислительного устройства найти декартовые составляющие вектора скорости ветра. Составляющие радиальной скорости ветра направлены по биссектрисам углов, образованных пересечением диаграмм направленности приемных антенн соответствующих каналов. Недостатком способа является низкая точность измерения скорости ветра, обусловленная незнанием точных координат рассеивающего объема вследствие явления ветровой рефракции, которая не учитывается при вычислении скорости ветра и может оказывать существенное влияние на точность измерения. Повышение точности измерений вектора скорости ветра при наличии ветровой рефракции может быть достигнуто путем дополнительного определения истинных координат рассеивающего объема и использования найденных координат для вычисления декартовых составляющих вектора скорости ветра. Таким образом, в известном способе измерения, включающем излучение вертикально вверх акустического сигнала, облучение рассеивающего объема, прием рассеянных эхо-сигналов на три приемные антенны, измерение доплеровского сдвига частоты, вычисление декартовых составляющих вектора скорости ветра и отображение информации дополнительно производится определение истинных координат рассеивающего объема, что позволяет определить составляющие вектора скорости ветра с большей точностью. Наиболее близким по технической сущности является устройство [Патент США № 3889533, кл. G 01 W 1/06, G 01 S 9/66,1975], содержащее последовательно соединенные задающий генератор, усилитель мощности, передающую антенну, три параллельных приемных канала, каждый из которых состоит из последовательно соединенных приемной антенны, усилителя каналов, выход каждого подключен ко входам решающего устройства, содержащего один или несколько спектроанализаторов и вычислительное устройство, три входа которого соединены с выходами спектроанализатора, синхронизатор, выходы которого соединены с задающим генератором, тремя спектроанализаторами, первым вычислительным устройством и индикаторным устройством, вход которого соединен с выходом вычислительного устройства. Существующее устройство не позволяет определять истинные координаты рассеивающего объема, что приводит к методической погрешности измерений скорости ветра. Технический результат может быть достигнут, если в устройство для измерения скорости ветра, содержащее последовательно соединенные задающий генератор, усилитель мощности и передающую антенну, три параллельных приемных канала, каждый из которых состоит из последовательно соединенных приемной антенны, усилителя и спектроанализатора, первое вычислительное устройство, три входа которого соединены с выходами спектроанализатора, индикаторное устройство, вход которого соединен с выходом первого вычислительного устройства, синхронизатор, выходы которого соединены с задающим генератором, тремя спектроанализаторами, первым вычислительным устройством и индикаторным устройством, согласно изобретению, дополнительно введено второе вычислительное устройство, вход которого соединен с выходом первого вычислительного устройства, а выход с оперативной памятью первого вычислительного устройства, кроме того, выход синхронизатора соединен со вторым входом второго вычислительного устройства. На фиг.1 приведена структурная схема устройства; на фиг.2 - зависимость абсолютной ошибки измерения модуля скорости ветра от истинной скорости ветра. Устройство содержит последовательно соединенные задающий генератор 1 и усилитель мощности 2, к выходу которого подключена передающая антенна 3, три приемных канала, каждый из которых состоит из последовательно соединенных приемной антенны 4, усилителя 5 и спектроанализатора 6, первое вычислительное устройство 7, три входа которого соединены с выходами спектроанализаторов 6 соответственно, индикаторное устройство 9, первый вход которого соединен с выходом первого вычислительного устройства 7, синхронизатор 10, выходы которого соединены со входами задающего генератора 1, входами трех спектроанализаторов 6 и первого вычислительного устройства 7 соответственно, а также со вторым входом индикаторного устройства 9. Предлагаемое устройство отличается от прототипа тем, что в него дополнительно введено второе вычислительное устройство 8, первый вход которого соединен с выходом первого вычислительного устройства 7, второй вход - с выходом синхронизатора 10 соответственно, а выход подключен к оперативной памяти первого вычислительного устройства 7. Устройство работает следующим образом. Напряжение колебаний рабочей частоты 10 задающего генератора 1 усиливается в усилителе мощности 2 и излучается передающей антенной 3. Рассеянные эхо-сигналы принимаются приемные антенны 4 и усиливаются в приемных каналах усиления 5, на выходах которых присутствуют доплеровские сдвиги частоты. В спектроанализаторе 6 осуществляется обработка выходных сигналов приемных каналов усиления и измерения значений доплеровских частот. В первом вычислительном устройстве 7, исходя из значений доплеровских частот f g1, f g2, f g3 каждого сигнала, производится определение декоративных составляющих вектора скорости ветра. Декартовы составляющие могут быть найдены путем решения следующей системы уравнений где K o - волновой вектор излучаемой волны; K r1, K r 2 , K r 3 - волновые векторы отраженных волн каждого канала; V - вектор скорости ветра. Система уравнений (1) может быть записана в скалярном виде Система уравнений (2) может быть решена одним из способов, описанных, например, в кн.: Дьяконов В.П. Справочник по алгоритмам и программам на языке Бейсик для ПЭВМ. М., Наука, 1989, 240 с. На первом шаге вычислений декартовы составляющие Vx, Vy, Vz определяются с методической погрешностью, обусловленной ветровой рефракцией. Уменьшение этой погрешности происходит на втором шаге вычислений, когда во втором вычислительном устройстве 8, исходя из найденных Vx, Vy, Vz определяются координаты рассеивающего объема, и, исходя из них, корректируются коэффициенты матрицы ІАІ, которые на втором шаге вычислений вводятся в память вычислительного устройства 7 в качестве параметров. Координаты рассеивающего объема F1 могут быть найдены из следующих формул где а1х', а1у', a1z' - координаты точки F1'; а1х", a1y", a1z" - координаты точки F1"; а1х'", а1у'"', a1z'" - координаты точки F1'"; F1', F1", F1'" - координаты точек, от которых антенны принимают максимальный рассеянный сигнал; f 1(j), f 2(j), f 3(j) - функции, описывающие ДН приемных антенн; j1, j2, j3 - углы между геометрическими осями приемных антенн и направлениями на точки F1', F1", F1"'. Далее из вычислительного устройства 8, исходя из найденных координат F1 находят координаты волновых векторов: Kr1, Kr2, Kr3 где О - точка размещения передающей антенны; А, В, С - точка размещения приемных антенн. Направления F1A, F1B, F1O совпадают с направлениями Kr1, K r 2 , K r3 . Направляющие косинусы могут быть найдены из следующих соотношений где lr - длина волны рассеянного колебания. Для F1B и F1O направляющие косинусы находятся аналогично. Далее найденные координаты векторов Kr1, Kr 2 и Kr 3 . вводятся в память вычислительного устройства 7 и система уравнения (2) решается повторно. Таким образом, во втором цикле вычислений декартовы составляющие скорости ветра определяются с учетом ветровой рефракции, а значит, они будут иметь более точные значения. Найденные значения индицируются в индикаторном устройстве 9. Работой всего устройства в целом управляет синхронизатор 10. Вычислительные устройства представляют собой специализированные вычислители со своими связями с гибкой логикой, что значительно упрощает устройство в целом. Они могут быть построены на базе микропроцессорных комплектов, при этом программы их работы будут храниться в ПЗУ. В ПЗУ первого вычислительного устройства, кроме программы, могут храниться также коэффициенты матрицы IAI, используемые на первом этапе вычислений. Первое вычислительное устройство может содержать также ОЗУ, используемые для ввода уточненных коэффициентов матрицы |А| с выхода второго вычислительного устройства, которые используются на втором этапе вычислений. Построение подобных устройств описано: Балашов Е.П. Микро- и мини-ЭВМ. Л. Энергоатомиздат, 1984, 326 с. Следует подчеркнуть, что оценки, сделанные с помощью моделирования на ЭВМ, выявляют нелинейный характер зависимости величины методической погрешности, обусловленной ветровой рефракцией, от модуля скорости ветра. Вычисление абсолютной ошибки измерений, обусловленной ветровой рефракцией, с применением алгоритма коррекции и без него производилось с помощью численных методов на ЭВМ, используя полученные ранее соотношения математической модели (2), (3) и (4). Получить точные аналитические выражения для абсолютных ошибок измерений невозможно из-за нелинейного характера таких зависимостей. Это подтверждает необходимость применения алгоритмов коррекции, так как данная погрешность не может быть устранена путем умножения на корректирующий множитель. Результаты расчетов представлены на фиг.2. По оси абсцисс - модуль скорости ветра в м/с. По оси ординат - абсолютная ошибка измерения модуля скорости ветра. Из представленного на фиг.2 следует, что при скоростях ветра 30 м/с ошибка измерений может достичь 6 м/с, но применение алгоритма коррекции позволяет снизить ошибку в 3 раза - до 2 м/с.
ДивитисяДодаткова інформація
Автори англійськоюAliokhin Volodymyr Ivanovych, Koretskyi Eduard Anatoliiovych, Sydorov Hennadii Ivanovych
Автори російськоюАлехин Владимир Иванович, Корецкий Эдуард Анатольевич, Сидоров Геннадий Иванович
МПК / Мітки
Мітки: швидкості, вітру, акустичний, вимірювання, пристрій
Код посилання
<a href="https://ua.patents.su/5-21187-akustichnijj-pristrijj-dlya-vimiryuvannya-shvidkosti-vitru.html" target="_blank" rel="follow" title="База патентів України">Акустичний пристрій для вимірювання швидкості вітру</a>
Пристрій для вимірювання середньої швидкості переміщення магнітного носія
Номер патенту: 7449
Опубліковано: 29.09.1995
Автори: Чернишов Володимир Йосипович, Стебновський Юрій Михайлович
МПК: G11B 27/36
Мітки: середньої, переміщення, вимірювання, швидкості, пристрій, носія, магнітного
Формула / Реферат:
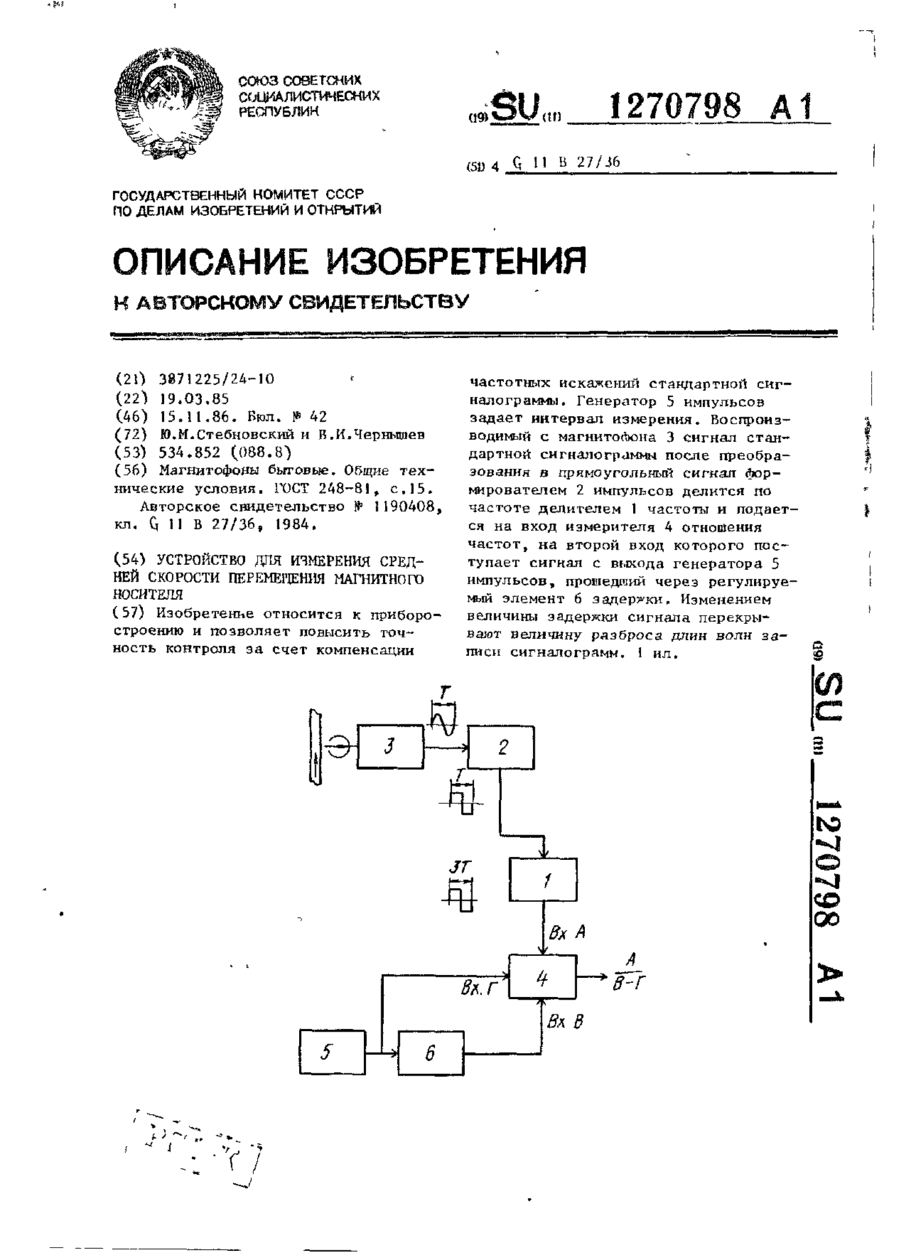
Устройство для измерения средней скорости перемещения магнитного носителя, содержащее делитель частоты, подключенный входом через формирователь импульсов к выходу магнитофона со стандартной сигналограммой, и выходом - к первому входу измерителя отношения частот, отличающееся тем, что, с целью повышения точности контроля за счет компенсации частотных искажений сигналограммы, в него введены песледовательно соединенные генератор импульсов и...
Радіоакустичний спосіб вимірювання параметрів вітру і пристрій для його здійснення
Номер патенту: 3819
Опубліковано: 27.12.1994
Автори: Коритцев Ігор Васильович, Альохін Володимир Іванович, Сідоров Геннадій Іванович, Прошкін Євген Григорійович
МПК: G01S 13/95
Мітки: параметрів, вітру, спосіб, здійснення, вимірювання, радіоакустичний, пристрій
Формула / Реферат:
1. Радиоакустический способ измерения параметров ветра, заключающийся в том, что излучают вертикально вверх акустический импульс синусоидальных колебаний, облучают возникающие от акустического импульса неоднородности среды непрерывными электромагнитными колебаниями с длиной волны, равной удвоенной известной длине волны акустических колебаний, принимают отраженные сигналы, отличающийся тем, что, с целью определения уровня турбулентности...
Пристрій для вимірювання швидкості переміщення
Номер патенту: 2063
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01P 3/42
Мітки: переміщення, пристрій, швидкості, вимірювання
Формула / Реферат:
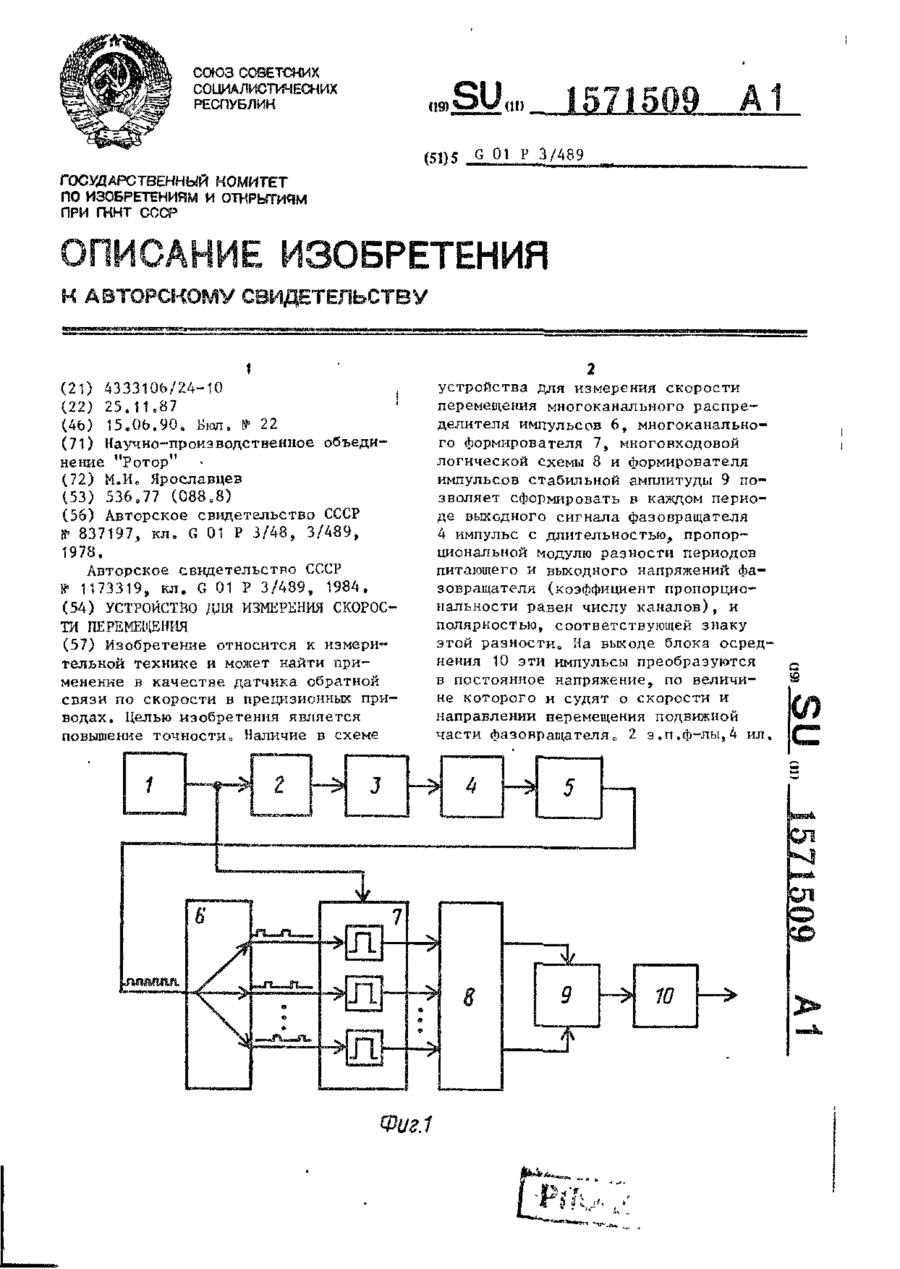
1. Устройство для измерения скорости перемещения, содержащее генератор эталонной частоты, делитель частоты и последовательно соединительные блок питания, фазовращатель, компаратор, многоканальный распределитель импульсов, многоканальный формирователь опорных импульсов, многовходовую логическую схему и блок осреднения, выход генератора эталонной частоты соединен с дополнительным входом многоканального формирователя опорных импульсов,...
Пристрій для вимірювання швидкості звуку
Номер патенту: 12449
Опубліковано: 28.02.1997
Автори: Дорошков Олександр Валентинович, Полонський Олександр Дмитрович
МПК: G01N 29/07, G01H 5/00, G01N 29/00, G01F 1/66
Мітки: вимірювання, звуку, пристрій, швидкості
Формула / Реферат:
Устройство для измерения скорости звука, содержащее последовательно соединенные мультивибратор, пьезоэлектрический преобразователь и находящийся па фиксированном расстоянии от него отражатель, отличающееся тем, что оно снабжено последовательно соединенными время-импульсным преобразователем, подключенным к выходу мультивибратора, интерфейсом ввода-вывода, первые информационные выходы которого соединены с индикатором, а вторые - с микроЭВМ,...
Пристрій для вимірювання дальності та радіальної швидкості
Номер патенту: 15338
Опубліковано: 30.06.1997
Автори: Самуль Юрій Володимирович, Челпанов Володимир Валентинович
МПК: G01S 13/00
Мітки: радіальної, вимірювання, дальності, пристрій, швидкості
Формула / Реферат:
Устройство для измерения дальности и радиальной скорости, содержащее последовательно соединенные приемную антенну, приемник, фазовый детектор, блок фазоизмерителей и блок индикации, а также последовательно соединенные опорный генератор, передатчик и передающую антенну, причем первый выход опорного генератора дополнительно соединен со вторым входом фазового детектора, а второй выход -с вторым входом блока фазоизмерителей, отличающееся тем, что...
Попередній патент: Спосіб відбору скороплідних форм волоського горіха
Наступний патент: Спосіб отримання активованого вугілля і пристрій для його здійснення
Випадковий патент: Сигналізатор рівня сипучих матеріалів