Пристрій для вимірювання дальності та радіальної швидкості
Номер патенту: 15338
Опубліковано: 30.06.1997
Автори: Самуль Юрій Володимирович, Челпанов Володимир Валентинович

Формула / Реферат
Устройство для измерения дальности и радиальной скорости, содержащее последовательно соединенные приемную антенну, приемник, фазовый детектор, блок фазоизмерителей и блок индикации, а также последовательно соединенные опорный генератор, передатчик и передающую антенну, причем первый выход опорного генератора дополнительно соединен со вторым входом фазового детектора, а второй выход -с вторым входом блока фазоизмерителей, отличающееся тем, что введено устройство компенсации помех, содержащее последовательно соединенные блок выделения фазовых флуктуации, блок вычисления отношения сигнал/помеха и блок обнаружения, а также последовательно соединенные блок выделения составляющих фазы сигнала цели, блок вычисления радиальной скорости цели и блока измерения дальности, причем вход блока выделения фазовых флуктуации соединен с выходом блока фазоизмерителей, первый вход блока выделения составляющих фазы сигнала цели соединен с выходом блока фазоизмерителей, второй вход - с выходом блока выделения фазовых флуктуации, третий вход - с выходом блока вычисления отношения сигнал/помеха, а выход соединен со вторым входом блока измерения дальности, при этом выходами устройства являются выходы блока обнаружения, блока вычисления радиальной скорости и блока измерения дальности.
Текст
Изобретение относится к радиолокации и может быть использовано, в частности, для обнаружения движущи хся объектов (целей), измерения дальности до объектов и их радиальной скорости в условиях воздействия пассивных помех. Наиболее близким по технической сущности к заявляемому является микроволновый дальномер, в котором зондирующий сигнал излучается на несущи х частота х и модулированных соответственно частотами и Диапазон однозначного измерения дальности определяется разностной частотой Значение дальности до объекта определяется по разности фаз колебаний частоты и Устройство включает последовательно соединенные приемную антенну, приемник, фазовый детектор, блок фазоизмерителей и блок индикации, а также последовательно соединенные опорный генератор, передатчик и передающую антенну, причем первый выход опорного генератора дополнительно соединен со вторым входом фазового детектора, а второй выход опорного генератора -со вторым входом блока фазоизмерителей. В приемнике осуществляется разделение эхосигналов несущих частот и С помощью фазовых детекторов и фазоизмерителей осуществляется выделение колебаний частоты и и измерение соответствующи х значений фаз эхо-сигналов и В блоке индикации в соответствии с выражением (2) производится отсчет дальности до объекта. К недостаткам устройства относится неэффективность его работы при измерении дальности в условиях воздействия пассивных помех ввиду значительного искажения фазовой информации. Кроме того, отсутствует обнаружитель движущегося объекта, который необходим в тех случаях, когда объект визуально не наблюдается. Для прогнозирования положения объекта необходимо также дополнить устройство измерителем скорости. В основу изобретения поставлена задача повышения эффективности работы устройства измерения дальности в условия х воздействия пассивных помех, обнаружения движущи хся объектов и измерения их радиальной скорости. Технический результат, который может быть получен при осуществлении изобретения, заключается в повышении точности измерения дальности при воздействии пассивных помех путем применения фазовой компенсации сигналов пассивных помех, выделения и когерентной обработки составляющих фазы эхо-сигналов, обусловленных движением объекта. Поставленная задача решается тем, что устройство измерения дальности, содержащее приемную антенну, приемник, фазовый детектор, блок фазоизмерителей, блок индикации, опорный генератор, передатчик и передающую антенну, согласно изобретению, дополнительно введено устройство компенсации, включающее блок выделения фазовых флуктуации, блок вычисления отношения сигнал/помеха, блок обнаружения, блок выделения составляющих фазы сигнала цели, блок вычисления радиальной скорости и блок измерения дальности. Работа устройства поясняется чертежами, где на фиг.1 приведена его структурная схема, на фиг.2 - векторная диаграмма эхо-сигналов цели, пассивной помехи и результирующего входного сигнала приемника, на фиг.3 - фазовые соотношения между этими сигналами. Заявляемое устройство содержит измеритель дальности 1, в состав которого входят последовательно соединенные приемная антенна 2, приемник 3, фазовый детектор 4, блок фазоизмерителей 5, блок индикации 6, и последовательно соединенные опорный генератор 9, передатчик 8 и передающая антенна 7, причем первый выход опорного генератора соединен со вторым входом фазового детектора, а второй выход опорного генератора - со вторым входом блока фазоизмерителей. Устройство содержит также компенсатор помех 10, в состав которого входят последовательно соединенные блок выделения фазовых флуктуации 11, блок вычисления отношения сигнал/помеха 12 и блок обнаружения 14, а также последовательно соединенные блок выделения составляющих фазы сигнала цели 13, блок вычисления радиальной скорости 15 и блок измерения дальности 16, причем вход блока выделения фазовых флуктуации соединен с выходом блока фазоизмерителей, первый вход блока выделения составляющих фазы сигнала цели также соединен с выходом блока фазоизмерителей, второй вход - с выходом блока выделения фазовых флуктуации, третий вход - с выходом блока вычисления отношения сигнал/помеха, а выход дополнительно соединен со вторым входом блока измерения дальности. Выходами устройства являются вы ходы блоков обнаружения 14, блока вычисления радиальной скорости 15 и блока измерения дальности 16. Устройство работает следующим образом. Опорный генератор 9 формирует колебания несущи х частот и и частот модуляции и В передатчике 8 осуществляется амплитудная модуляция колебаний несущих частот и их усиление. Через передающую антенну 7 зондирующий сигнал излучается в направлении на объект. Эхо-сигналы цели и помехи принимаются приемной антенной 2, далее в приемнике 3 они усиливаются и разделяются на колебания несущи х частот и В фазовом детекторе 4 выделяются модулирующие колебания частот которые поступают на блок 5. В блоке 5 осуществляется измерение значений фазы эхосигналов отно-сительно фазы опорных колебаний модулирующи х частот и где - начальное значение дальности (для - радиальная скорость объекта, - периодичность отсчета фазы, - количество замеров фазы. В блоке индикации 6 производится пересчет значений разностной фазы в значение дальности в соответствии с соотношением (2). В соответствии с выражениями (6) и (7), в блоке 12 производится вычисление значений для колебаний частот и Измеренные значения фазы определяются амплитудными и фазовыми соотношениями между эхо-сигналами цели и пассивной помехи Если амплитуда помехи больше амплитуды эхо-сигнала цели (фиг.2), то значения результирующей фазы в основном определяются фазовыми соотношениями для сигнала помехи (фиг.3). Следовательно, в устройстве 1 измерение дальности по значениям Аналогичное выражение используется для вычисления В блоке 14 осуществляется сравнение значения с порогом Для сравнения с порогом целесообразно использовать фазы будет осуществляться с большими ошибками. Для повышения точности измерения при наличии помех в устройстве компенсации 10 усредненное значение При определяются составляющие фазы обусловленные параметрами движения цели. Для этого необходимо знать соотношение амплитуд эхо движущийся объект считается обнаруженным. Значение qпор вычисляется исходя из заданной вероятности ложной тревоги на основе априорной информации о фазовых характеристиках пассивных помех. В блоке 13 выделяются составляющие фазы сигналов цели и помехи эхо-сигнала цели в частности, для колебаний частоты будем иметь и значение фазы сигнала помехи В блоке 11 выделяются значения фазы помехи и рассогласования по фазе между результирующей фазой и фазой помехи для значений модулирующи х частот и Данное выражение получено с использованием теоремы синусов из векторной диаграммы (фиг.2). Аналогично определяется значение для колебаний частоты В блоке 15 по значениям определяется радиальная скорость цели где Аналогично записываются выражения для колебаний частоты Так как сигнал пассивной помехи (в частности, отражения от местных предметов) имеет стабильную фазу, флуктуации результирующей фазы будут обусловлены эхо-сигналами цели. В блоке 12 определяется отношение сигнал/помеха q по значению Значения радиальной скорости определяются для колебаний модулирующи х часто т и и а окончательная оценка величины записывается как средневзвешенное значение Значение равно если вектор эхосигнала цели и результирующий вектор составляют угол, равный диаграммы (фиг.2). Тогда из векторной Учитывая, что закон распределения к равномерному в пределах можно записать соотношение фазовых флуктуации для близок дисперсии В блоке 16 дальность до цели где определяется начальная (для момента времени порядка А отклонение фазы эхосигнала за счет пассивной помехи, исходя из соотношений (6) и (7), например при можно оценить величиной Следовательно, применение устройства компенсации 10 позволяет уменьшить ошибку измерения дальности фазовым методом, при не менее чем в 3 раза. На выход устройства компенсации 10 поступает информация об обнаружении движущихся объектов и параметры и Блок компенсации 10 включается в работу в случае наличия достаточно мощных пассивных помех (в частности, отражений от местных предметов). При технической реализации устройства измерения дальности 1 блоки 2 ... 9 могут быть выполнены как в прототипе, в частности, приемная 2 и передающая 7 антенны выполнены в виде направленных рупорных антенн. Приемник 3 содержит широкополосный УВЧ, преобразователи частоты, узкополосные УНЧ для разделения сигналов несущи х частот; блок 4 представляет собой набор фазовых детекторов для выделения модулирующи х частот; блок 5 может быть выполнен в виде цифрового фазометра; передатчик 8 содержит амплитудный модулятор и усилитель мощности, опорный генератор 9 представляет собой синтезатор частот с кварцевой стабилизацией, блок индикатора 6 содержит преобразователь измеренной разности фаз в значение дальности с цифровой индикацией результата. Элементыустройства компенсации 10 (блоки 11 ... 16) в соответствии с выражениями (4) ... (16) должны обеспечить вычисление различных тригонометрических функций проведение арифметических операций (сложение, умножение, вычитание и деление) и логических операций (сравнение с пороговым значением). Вычисление тригонометрических функций может быть технически реализовано с помощью дешифраторов кодов. Сумматоры, умножители и делители являются элементами импульсных устройств и выполняются на базе соответствующи х интегральных микросхем. Блок обнаружения включает в свой состав ци фровой компаратор. Точность измерения радиальной скорости и дальности в устройстве можно оценить на основе соотношений (10) и (13): Среднеквадратическая измерения фазы сигнала ошибка (СКО) составляет величину
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for measurement of range and radial velocity
Автори англійськоюChelpanov Volodymyr Valentynovych, Samul Yurii Volodymyrovych
Назва патенту російськоюУстройство для измерения дальности и радиальной скорости
Автори російськоюЧелпанов Владимир Валентинович, Самуль Юрий Владимирович
МПК / Мітки
МПК: G01S 13/00
Мітки: пристрій, радіальної, дальності, вимірювання, швидкості
Код посилання
<a href="https://ua.patents.su/4-15338-pristrijj-dlya-vimiryuvannya-dalnosti-ta-radialno-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання дальності та радіальної швидкості</a>
Спосіб вимірювання радіальної швидкості цілі для секвентного радіолокатора
Номер патенту: 17468
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: радіолокатора, секвентного, цілі, вимірювання, швидкості, спосіб, радіальної
Формула / Реферат:
Способ измерения радиальной скорости цели для секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде периодической последовательности наносекундных видеоимпульсов без несущей частоты и приеме эхо-сигналов, отраженных от движущейся цели, отличающийся тем, что выбирают частоту следования зондирующих видеоимпульсов значительно больше максимальной допплеровской частоты на верхней частоте спектра излучаемого сигнала,...
Радіолокаційний пристрій для визначення дальності та швидкості цілі
Номер патенту: 3925
Опубліковано: 27.12.1994
Автори: Шермаревич Владлен Георгієвич, Кравцов Володимир Геннадєвич, Гегечкорі Сергій Олексійович, Невгасимий Олександр Федорович, Гладиш Фелікс Леонідович
МПК: G01S 13/00
Мітки: радіолокаційний, цілі, пристрій, швидкості, визначення, дальності
Формула / Реферат:
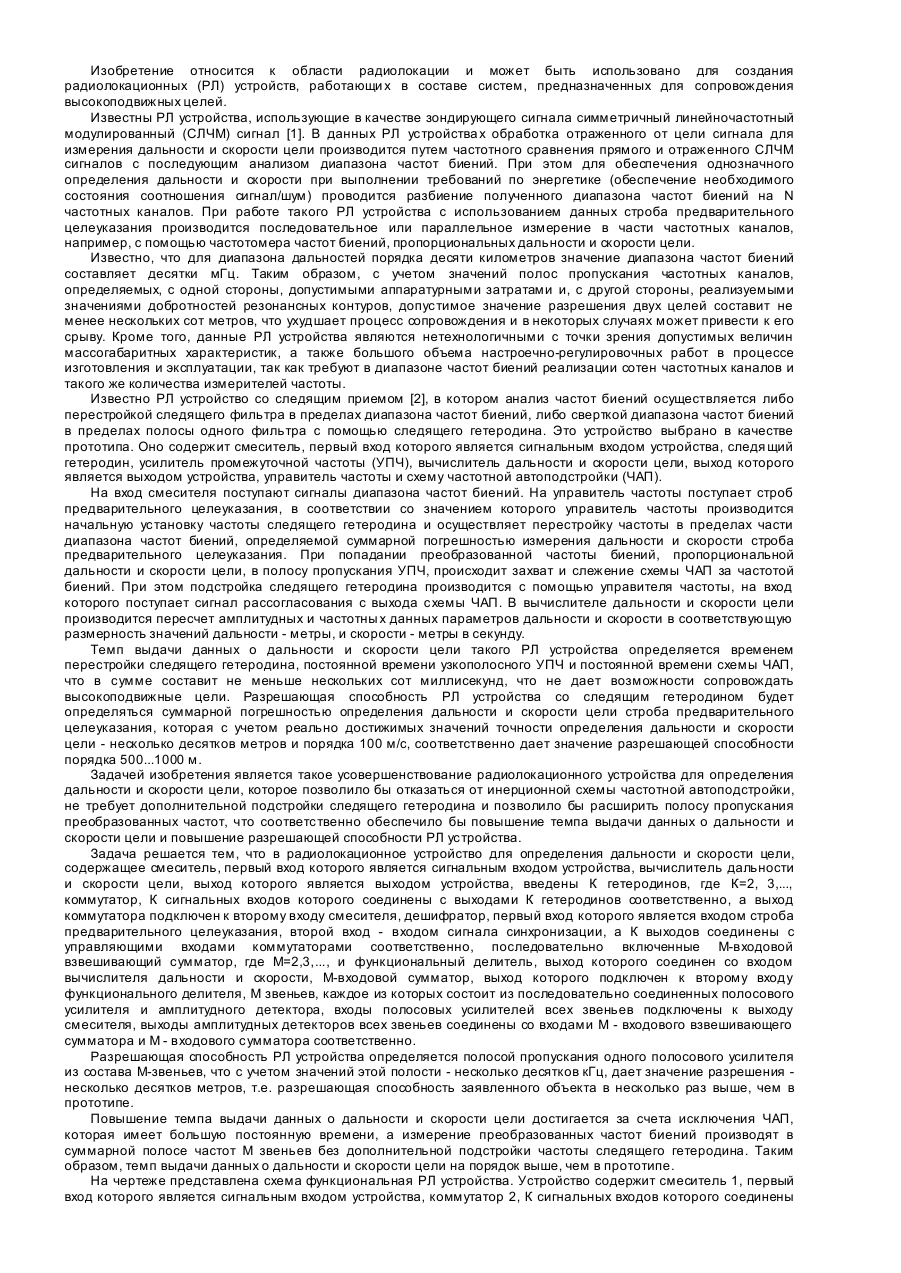
Радиолокационное устройство для определения дальности и скорости цели, содержащее смеситель, первый выход которого является сигнальным входом устройства, вычислитель дальности и скорости цели, выход которого является выходом устройства, отличающееся тем, что введены К гетеродинов, где К= 2, 3,....коммутатор. К сигнальных входов которого соединены с выходами К гетеродинов соответственно, а выход коммутатора подключен к второму входу смесителя,...
Пристрій для вимірювання середньої швидкості переміщення магнітного носія
Номер патенту: 7449
Опубліковано: 29.09.1995
Автори: Чернишов Володимир Йосипович, Стебновський Юрій Михайлович
МПК: G11B 27/36
Мітки: вимірювання, швидкості, переміщення, носія, середньої, магнітного, пристрій
Формула / Реферат:
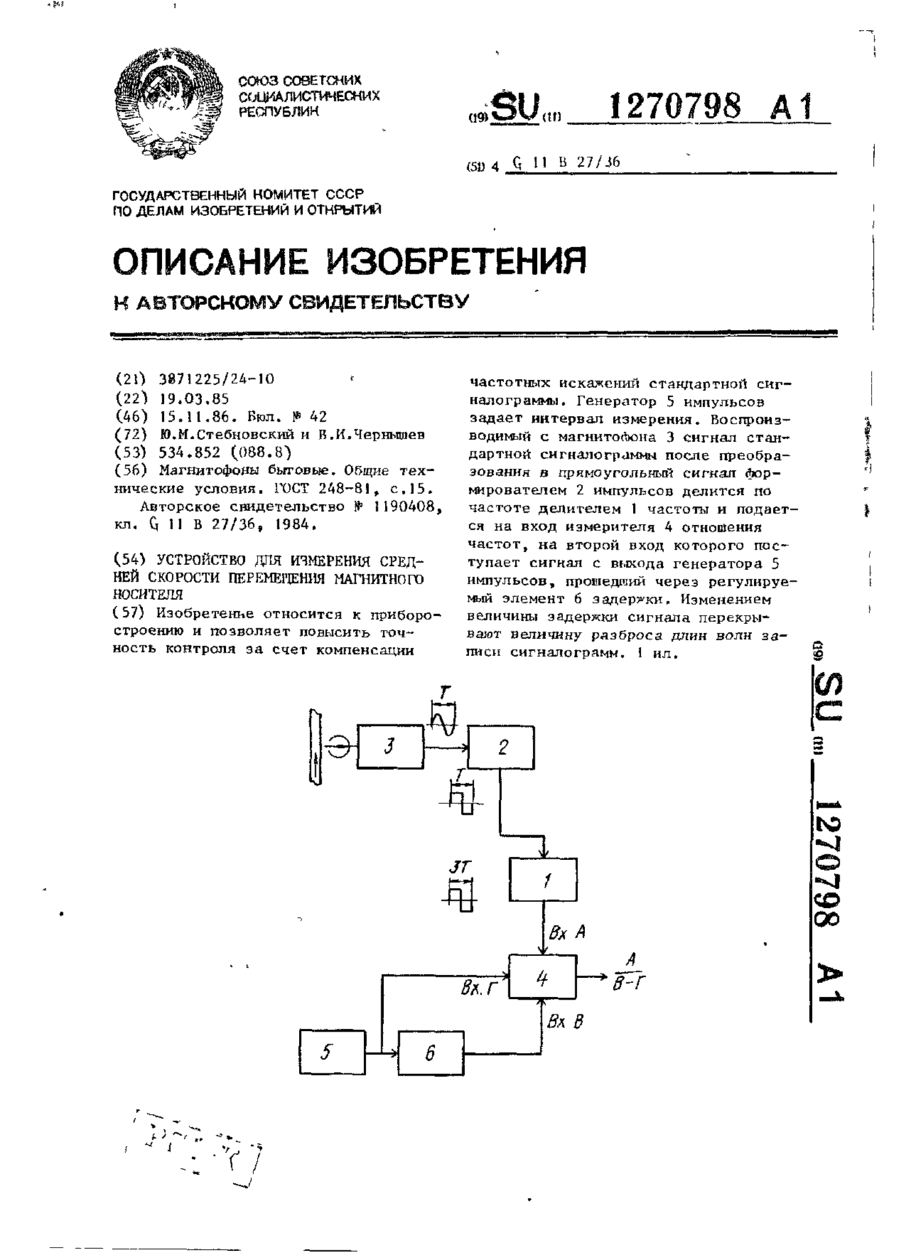
Устройство для измерения средней скорости перемещения магнитного носителя, содержащее делитель частоты, подключенный входом через формирователь импульсов к выходу магнитофона со стандартной сигналограммой, и выходом - к первому входу измерителя отношения частот, отличающееся тем, что, с целью повышения точности контроля за счет компенсации частотных искажений сигналограммы, в него введены песледовательно соединенные генератор импульсов и...
Пристрій для вимірювання параметрів інерційних ланок
Номер патенту: 4063
Опубліковано: 27.12.1994
Автори: Гусєв Ігор Вікторович, Левочко Борис Степанович, Ситник Борис Тимофійович, Мамонов Анатолій Васильович, Гусєв Павло Вікторович, Загарій Генадій Іванович
МПК: G05B 23/02
Мітки: вимірювання, ланок, пристрій, параметрів, інерційних
Формула / Реферат:
Устройство для измерения параметров инерционных звеньев, содержащее блок вычисления параметров передаточной функции, первый и второй фильтры, выходы которых подключены соответственно к первому и второму входам блока вычисления параметров передаточной функции, выход которого является выходом устройства, а первые входы первого и второго фильтров подключены соответственно к выходу и входу исследуемого звена, вход которого является входом...
Пристрій для вимірювання швидкості переміщення
Номер патенту: 2063
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01P 3/42
Мітки: швидкості, вимірювання, переміщення, пристрій
Формула / Реферат:
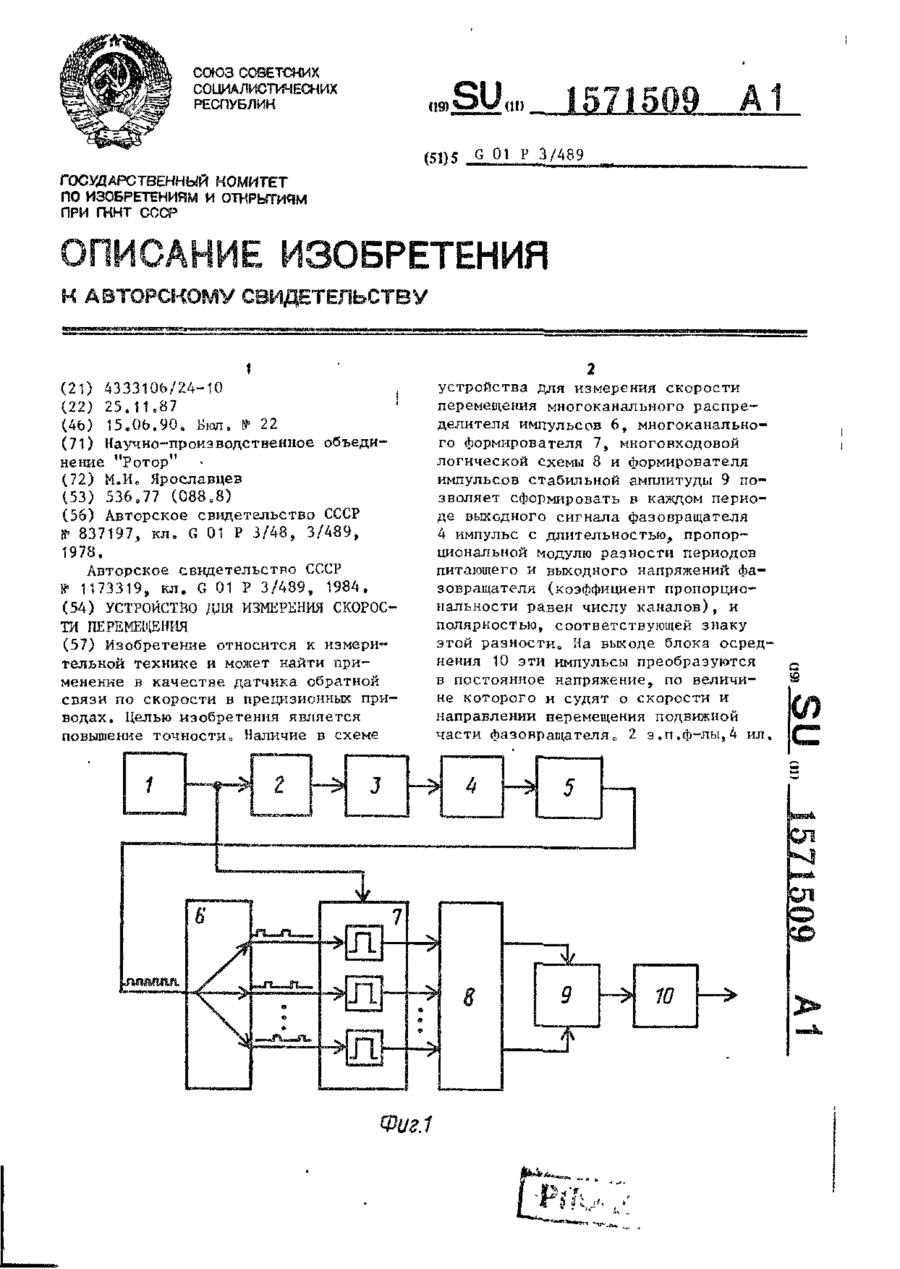
1. Устройство для измерения скорости перемещения, содержащее генератор эталонной частоты, делитель частоты и последовательно соединительные блок питания, фазовращатель, компаратор, многоканальный распределитель импульсов, многоканальный формирователь опорных импульсов, многовходовую логическую схему и блок осреднения, выход генератора эталонной частоты соединен с дополнительным входом многоканального формирователя опорных импульсов,...
Попередній патент: Hасос коловратhий
Наступний патент: Активна нвч антена
Випадковий патент: Спосіб хірургічного лікування хворих на туберкульоз легень