Лінійний індукційний апарат
Номер патенту: 26240
Опубліковано: 10.09.2007
Автори: Орлов Ігор Іванович, Богаєнко Микола Володимирович, Попков Володимир Сергійович, Шуляк Володимир Миколайович
Формула / Реферат
Лінійний індукційний апарат, який має індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками та знімною торцевою стінкою, що є кришкою завантажувального вікна, має форму і розміри торця камери і кріпиться до нього через ущільнювальні елементи за допомогою фігурних скоб і в якій розміщені феромагнітні робочі частки, який відрізняється тим, що камера в нижній частині внутрішнього об'єму обладнана дистанційним елементом з електропровідним покриттям зі сторони робочого об'єму камери, на кожній з подовжніх кінцевих частин дистанційного елемента змонтовано по ряду стояків, між якими на середині висоти робочого об'єму камери паралельно подовжній осі камери встановлені струни з електропровідного матеріалу, при цьому струни, електропровідне покриття дистанційного елемента та корпус камери електрично з'єднані між собою і з контуром заземлення.
Текст
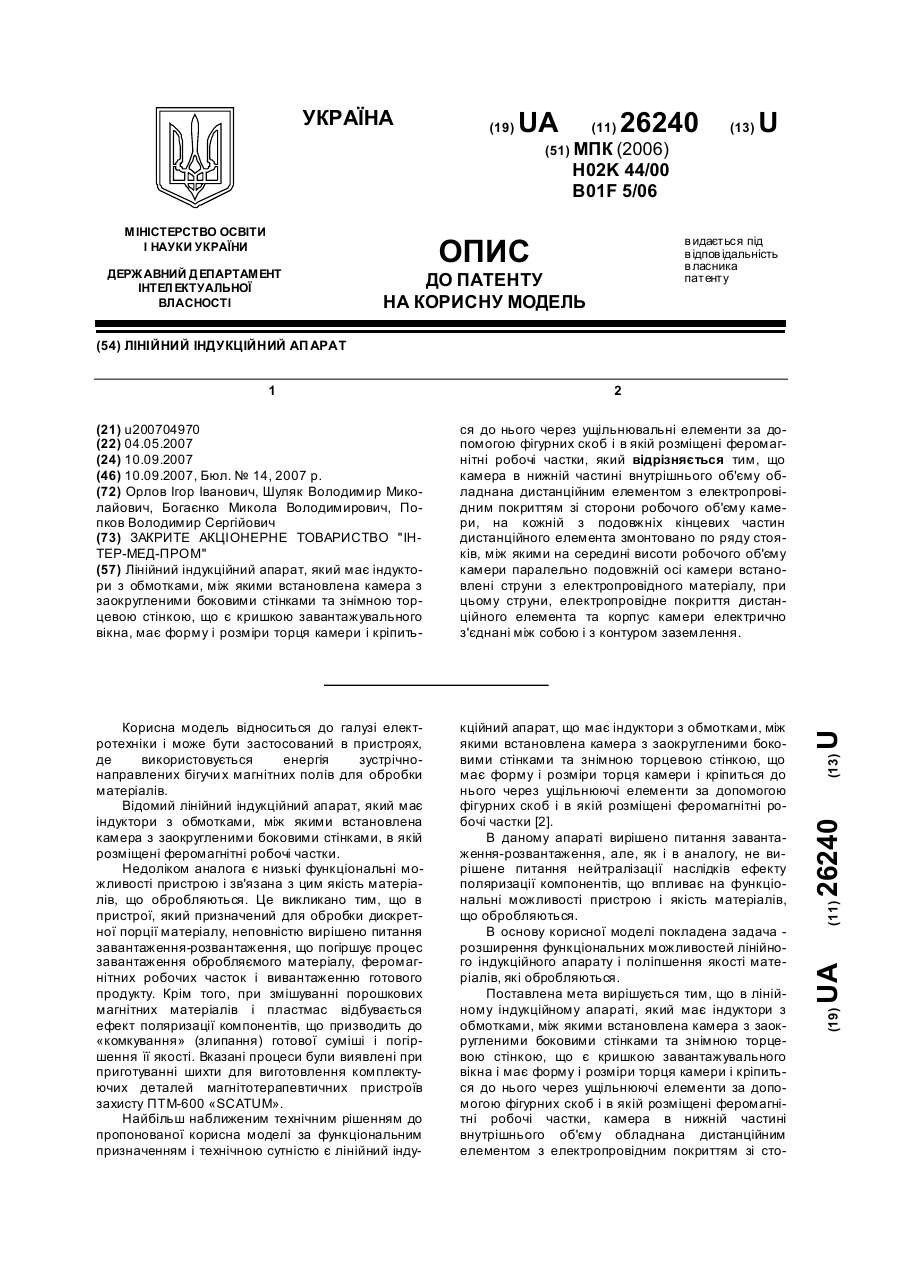
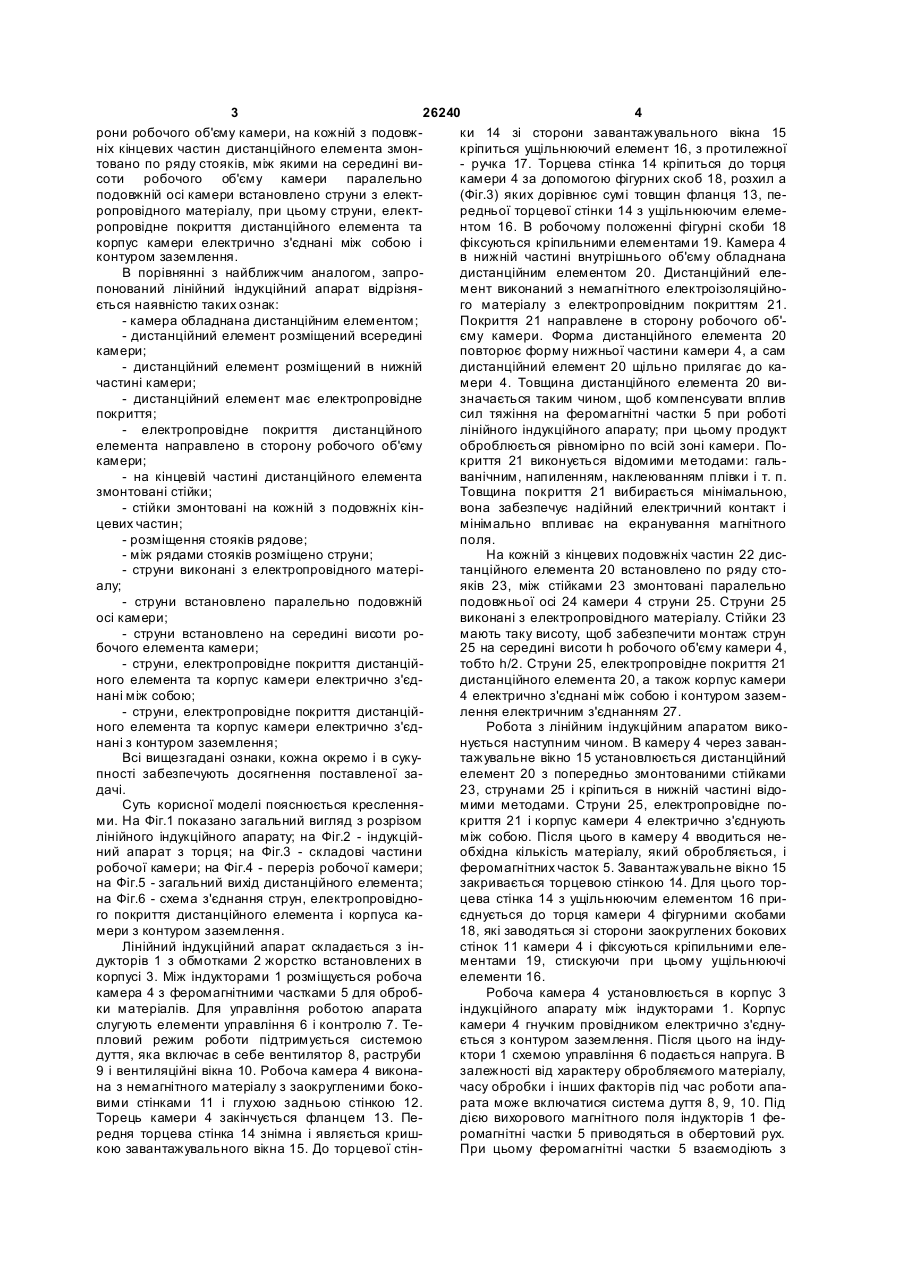
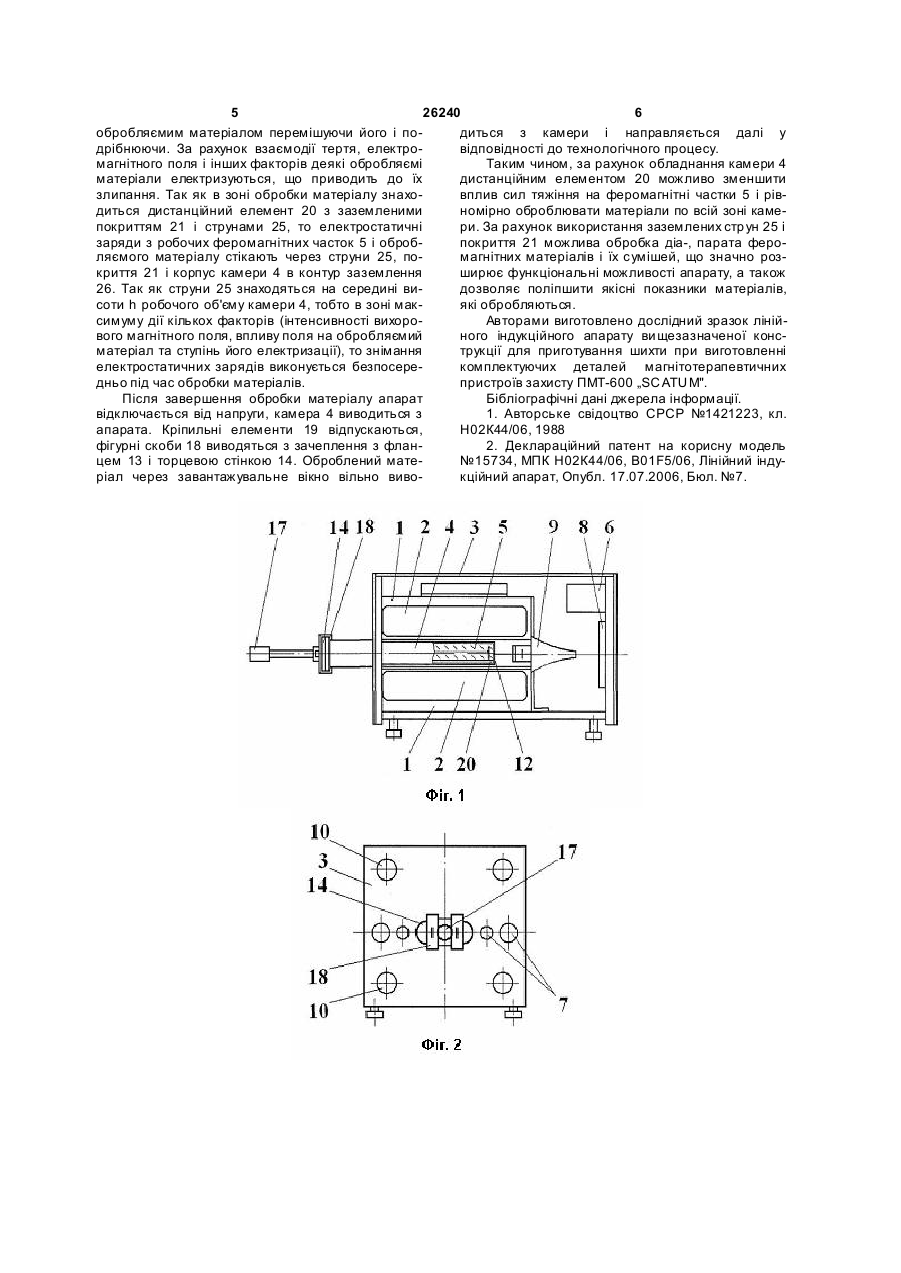
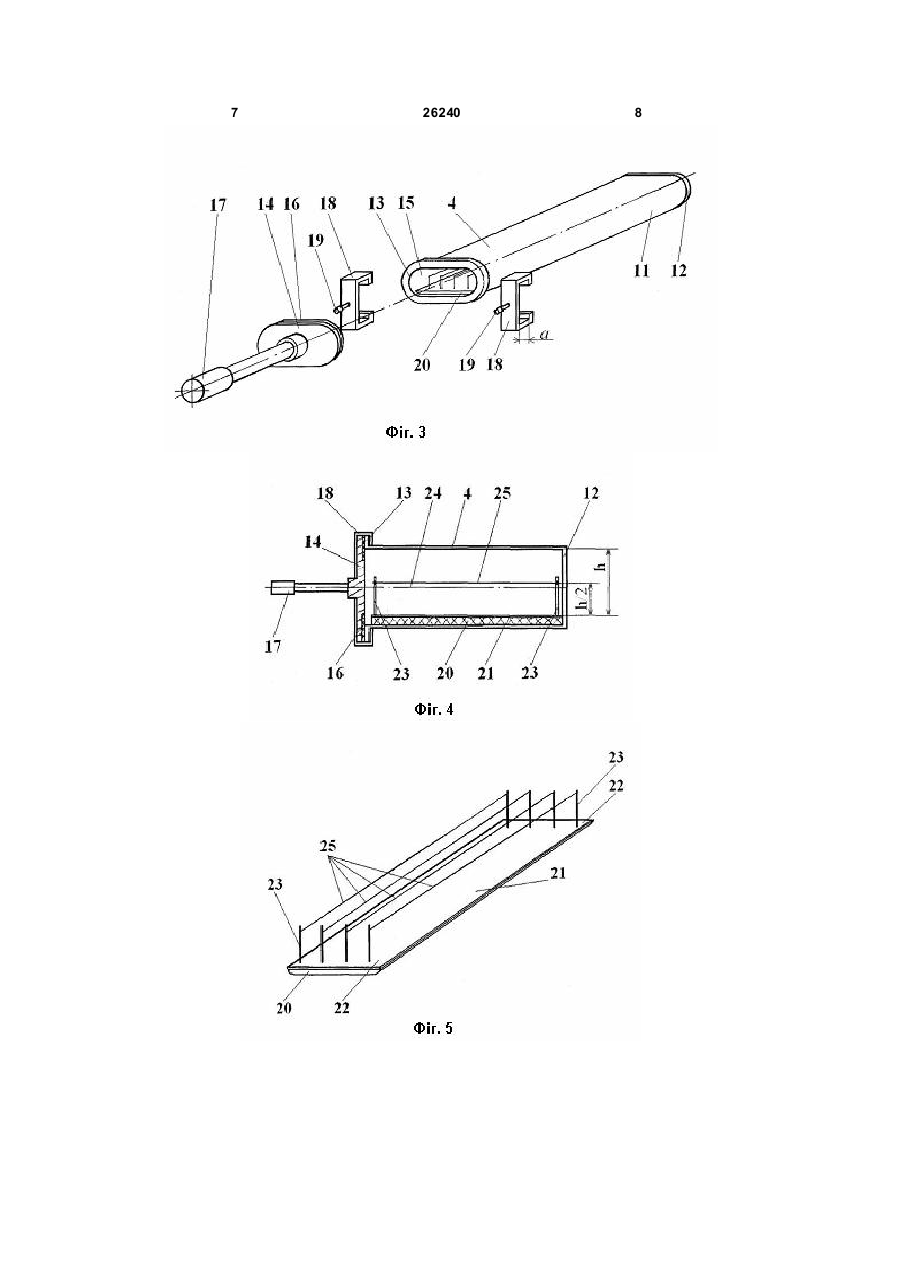
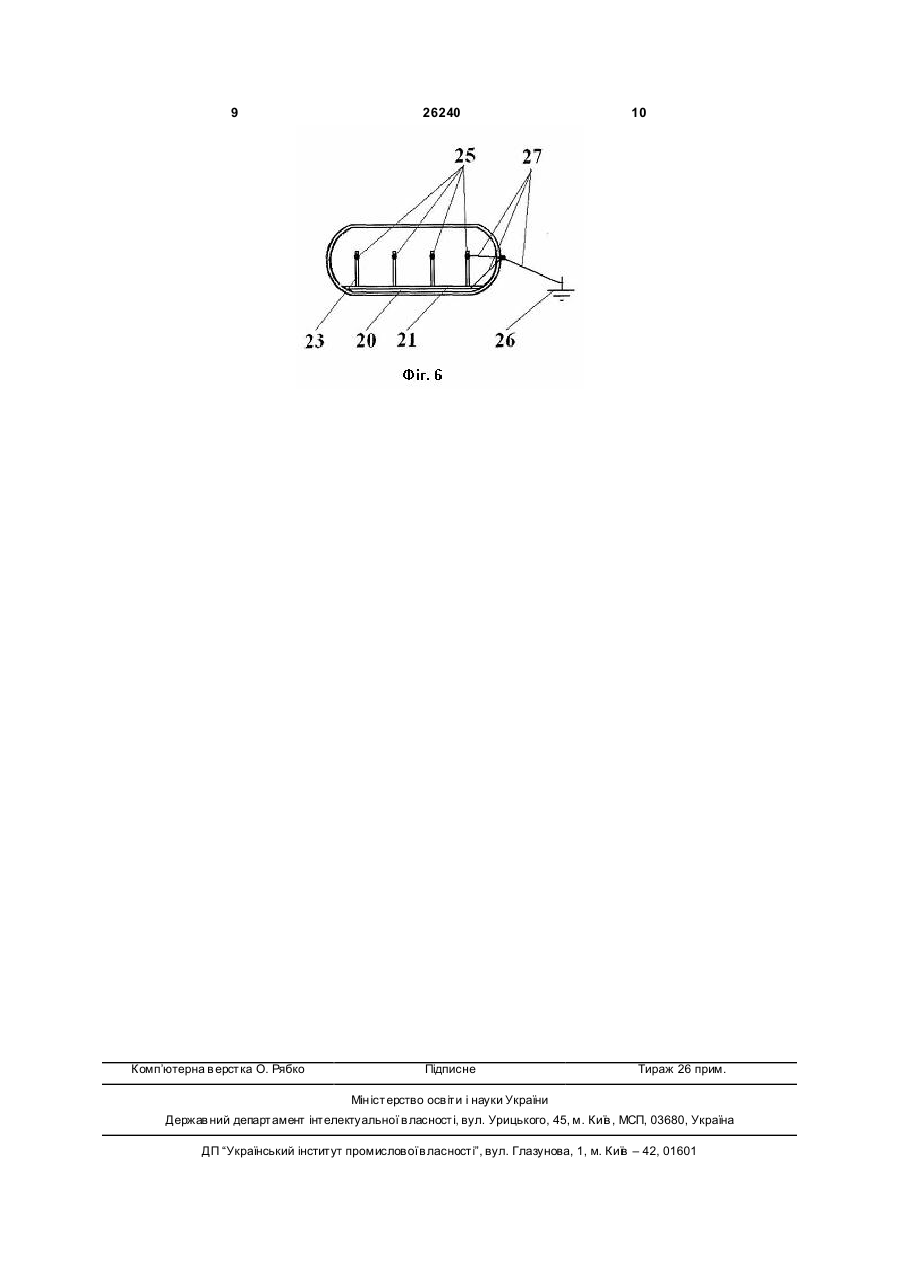
Лінійний індукційний апарат, який має індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками та знімною торцевою стінкою, що є кришкою завантажувального вікна, має форму і розміри торця камери і кріпить 3 26240 4 рони робочого об'єму камери, на кожній з подовжки 14 зі сторони завантажувального вікна 15 ніх кінцевих частин дистанційного елемента змонкріпиться ущільнюючий елемент 16, з протилежної товано по ряду стояків, між якими на середині ви- ручка 17. Торцева стінка 14 кріпиться до торця соти робочого об'єму камери паралельно камери 4 за допомогою фігурних скоб 18, розхил а подовжній осі камери встановлено струни з елект(Фіг.3) яких дорівнює сумі товщин фланця 13, перопровідного матеріалу, при цьому струни, електредньої торцевої стінки 14 з ущільнюючим елемеропровідне покриття дистанційного елемента та нтом 16. В робочому положенні фігурні скоби 18 корпус камери електрично з'єднані між собою і фіксуються кріпильними елементами 19. Камера 4 контуром заземлення. в нижній частині внутрішнього об'єму обладнана В порівнянні з найближчим аналогом, запродистанційним елементом 20. Дистанційний елепонований лінійний індукційний апарат відрізнямент виконаний з немагнітного електроізоляційноється наявністю таких ознак: го матеріалу з електропровідним покриттям 21. - камера обладнана дистанційним елементом; Покриття 21 направлене в сторону робочого об'- дистанційний елемент розміщений всередині єму камери. Форма дистанційного елемента 20 камери; повторює форму нижньої частини камери 4, а сам - дистанційний елемент розміщений в нижній дистанційний елемент 20 щільно прилягає до качастині камери; мери 4. Товщина дистанційного елемента 20 ви- дистанційний елемент має електропровідне значається таким чином, щоб компенсувати вплив покриття; сил тяжіння на феромагнітні частки 5 при роботі - електропровідне покриття дистанційного лінійного індукційного апарату; при цьому продукт елемента направлено в сторону робочого об'єму оброблюється рівномірно по всій зоні камери. Покамери; криття 21 виконується відомими методами: галь- на кінцевій частині дистанційного елемента ванічним, напиленням, наклеюванням плівки і т. п. змонтовані стійки; Товщина покриття 21 вибирається мінімальною, - стійки змонтовані на кожній з подовжніх кінвона забезпечує надійний електричний контакт і цевих частин; мінімально впливає на екранування магнітного - розміщення стояків рядове; поля. - між рядами стояків розміщено струни; На кожній з кінцевих подовжніх частин 22 дис- струни виконані з електропровідного матерітанційного елемента 20 встановлено по ряду стоалу; яків 23, між стійками 23 змонтовані паралельно - струни встановлено паралельно подовжній подовжньої осі 24 камери 4 струни 25. Струни 25 осі камери; виконані з електропровідного матеріалу. Стійки 23 - струни встановлено на середині висоти ромають таку висоту, щоб забезпечити монтаж струн бочого елемента камери; 25 на середині висоти h робочого об'єму камери 4, - струни, електропровідне покриття дистанційтобто h/2. Струни 25, електропровідне покриття 21 ного елемента та корпус камери електрично з'єддистанційного елемента 20, а також корпус камери нані між собою; 4 електрично з'єднані між собою і контуром зазем- струни, електропровідне покриття дистанційлення електричним з'єднанням 27. ного елемента та корпус камери електрично з'єдРобота з лінійним індукційним апаратом виконані з контуром заземлення; нується наступним чином. В камеру 4 через заванВсі вищезгадані ознаки, кожна окремо і в сукутажувальне вікно 15 установлюється дистанційний пності забезпечують досягнення поставленої заелемент 20 з попередньо змонтованими стійками дачі. 23, струнами 25 і кріпиться в нижній частині відоСуть корисної моделі пояснюється кресленнямими методами. Струни 25, електропровідне поми. На Фіг.1 показано загальний вигляд з розрізом криття 21 і корпус камери 4 електрично з'єднують лінійного індукційного апарату; на Фіг.2 - індукційміж собою. Після цього в камеру 4 вводиться нений апарат з торця; на Фіг.3 - складові частини обхідна кількість матеріалу, який обробляється, і робочої камери; на Фіг.4 - переріз робочої камери; феромагнітних часток 5. Завантажувальне вікно 15 на Фіг.5 - загальний вихід дистанційного елемента; закривається торцевою стінкою 14. Для цього торна Фіг.6 - схема з'єднання струн, електропровідноцева стінка 14 з ущільнюючим елементом 16 приго покриття дистанційного елемента і корпуса каєднується до торця камери 4 фігурними скобами мери з контуром заземлення. 18, які заводяться зі сторони заокруглених бокових Лінійний індукційний апарат складається з інстінок 11 камери 4 і фіксуються кріпильними еледукторів 1 з обмотками 2 жорстко встановлених в ментами 19, стискуючи при цьому ущільнюючі корпусі 3. Між індукторами 1 розміщується робоча елементи 16. камера 4 з феромагнітними частками 5 для обробРобоча камера 4 установлюється в корпус 3 ки матеріалів. Для управління роботою апарата індукційного апарату між індукторами 1. Корпус слугують елементи управління 6 і контролю 7. Текамери 4 гнучким провідником електрично з'єднупловий режим роботи підтримується системою ється з контуром заземлення. Після цього на індудуття, яка включає в себе вентилятор 8, раструби ктори 1 схемою управління 6 подається напруга. В 9 і вентиляційні вікна 10. Робоча камера 4 виконазалежності від характеру обробляємого матеріалу, на з немагнітного матеріалу з заокругленими бокочасу обробки і інших факторів під час роботи апавими стінками 11 і глухою задньою стінкою 12. рата може включатися система дуття 8, 9, 10. Під Торець камери 4 закінчується фланцем 13. Педією вихорового магнітного поля індукторів 1 фередня торцева стінка 14 знімна і являється кришромагнітні частки 5 приводяться в обертовий рух. кою завантажувального вікна 15. До торцевої стінПри цьому феромагнітні частки 5 взаємодіють з 5 26240 6 обробляємим матеріалом перемішуючи його і подиться з камери і направляється далі у дрібнюючи. За рахунок взаємодії тертя, електровідповідності до технологічного процесу. магнітного поля і інших факторів деякі обробляємі Таким чином, за рахунок обладнання камери 4 матеріали електризуються, що приводить до їх дистанційним елементом 20 можливо зменшити злипання. Так як в зоні обробки матеріалу знаховплив сил тяжіння на феромагнітні частки 5 і рівдиться дистанційний елемент 20 з заземленими номірно оброблювати матеріали по всій зоні камепокриттям 21 і струнами 25, то електростатичні ри. За рахунок використання заземлених стр ун 25 і заряди з робочих феромагнітних часток 5 і обробпокриття 21 можлива обробка діа-, парата фероляємого матеріалу стікають через струни 25, помагнітних матеріалів і їх сумішей, що значно розкриття 21 і корпус камери 4 в контур заземлення ширює функціональні можливості апарату, а також 26. Так як струни 25 знаходяться на середині видозволяє поліпшити якісні показники матеріалів, соти h робочого об'єму камери 4, тобто в зоні макякі обробляються. симуму дії кількох факторів (інтенсивності вихороАвторами виготовлено дослідний зразок лінійвого магнітного поля, впливу поля на обробляємий ного індукційного апарату ви щезазначеної консматеріал та ступінь його електризації), то знімання трукції для приготування шихти при виготовленні електростатичних зарядів виконується безпосерекомплектуючих деталей магнітотерапевтичних дньо під час обробки матеріалів. пристроїв захисту ПМТ-600 „SC ATU M". Після завершення обробки матеріалу апарат Бібліографічні дані джерела інформації. відключається від напруги, камера 4 виводиться з 1. Авторське свідоцтво СРСР №1421223, кл. апарата. Кріпильні елементи 19 відпускаються, Н02К44/06, 1988 фігурні скоби 18 виводяться з зачеплення з флан2. Деклараційний патент на корисну модель цем 13 і торцевою стінкою 14. Оброблений мате№15734, МПК Н02К44/06, В01F5/06, Лінійний індуріал через завантажувальне вікно вільно вивокційний апарат, Опубл. 17.07.2006, Бюл. №7. 7 26240 8 9 Комп’ютерна в ерстка О. Рябко 26240 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear induction apparatus
Автори англійськоюOrlov Ihor Ivanovych, Shuliak Volodymyr Mykolaiovych, Bohaienko Mykola Volodymyrovych, Popkov Volodymyr Serhiiovychch, Popkov Volodymyr Serhiiovych
Назва патенту російськоюЛинейный индукционный аппарат
Автори російськоюОрлов Игорь Иванович, Шуляк Володимир Миколайович, Богаенко Николай Владимирович, Попков Владимир Сергеевич
МПК / Мітки
МПК: B01F 5/06, H02K 44/00
Мітки: індукційний, лінійний, апарат
Код посилання
<a href="https://ua.patents.su/5-26240-linijjnijj-indukcijjnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Лінійний індукційний апарат</a>
Лінійний індукційний апарат
Номер патенту: 15734
Опубліковано: 17.07.2006
Автори: Попков Володимир Сергійович, Богаєнко Микола Володимирович, Шуляк Володимир Миколайович, Орлов Ігор Іванович
МПК: B01F 5/06, H02K 44/00
Мітки: лінійний, апарат, індукційний
Формула / Реферат:
Лінійний індукційний апарат, що містить індуктори з обмотками, між якими встановлена камера з заокругленими боковими стінками, в якій розміщені феромагнітні робочі частинки, який відрізняється тим, що робоча камера містить знімну торцеву стінку, яка є кришкою завантажувального вікна, виконану подвійною, зовнішня стінка має форму і розміри торця камери і кріпиться до нього через ущільнюючі елементи за допомогою фігурних скоб, а внутрішня, до...
Лінійний індукційний прискорювач
Номер патенту: 64208
Опубліковано: 15.06.2005
Автори: Гурин Анатолій Григорович, Алдакімов Олексій Сергіович, Гладченко Валентин Яковлевич, Корнілов Євген Олександрович, Ложкін Руслан Сергіович
МПК: H05H 9/00, H05H 11/00
Мітки: прискорювач, індукційний, лінійний
Формула / Реферат:
1. Лінійний індукційний прискорювач, що містить корпус, інжектор електронів, прискорюючу магнітну систему, прискорюючу трубку з ізолятором, який відрізняється тим, що його магнітна система розташована всередині корпуса та має співвісні кільцеві одиночні магнітопроводи, які розташовані вздовж осі магнітної системи та зібрані у єдину конструкцію і розміщені у магнітному полі первинного витка, при цьому внутрішнє кільце співвісного кільцевого...
Індукційний апарат з вихоровим магнітним полем
Номер патенту: 17066
Опубліковано: 15.09.2006
Автори: Попков Володимир Сергійович, Орлов Ігор Іванович, Богаєнко Микола Володимирович, Шуляк Володимир Миколайович
МПК: H02K 44/00
Мітки: вихоровим, магнітним, апарат, індукційний, полем
Формула / Реферат:
Індукційний апарат з вихоровим магнітним полем, що має магнітопровід з зосередженими котушками, робочу камеру з немагнітного матеріалу, який відрізняється тим, що робоча камера має радіально розташовані тепловідвідні елементи у вигляді пласких пластин вздовж активного шару, між якими розташовані шихтовані стрижні, кількість яких дорівнює числу фазових зон вихорового магнітного поля, на кінцях, що направлені в сторону робочої камери,...
Багатоканальний лінійний індукційний прискорювач заряджених частинок

Номер патенту: 42392
Опубліковано: 15.04.2004
Автори: МЕЛЬНИК АЛЕКСАНДРА КЛАВДІЯ, Куліш Віктор Васильович
МПК: H05H 9/00, H05H 11/00
Мітки: лінійний, заряджених, індукційний, багатоканальний, прискорювач, частинок
Формула / Реферат:
1. Багатоканальний лінійний індукційний прискорювач заряджених частинок, що містить в собі інжекторний блок, прискорювальний блок, джерело живлення та блок вихідних пристроїв для лінійних пучків заряджених частинок, який відрізняється тим, що прискорювальний блок виконано у формі не менше як двох електродинамічно зв'язаних прискорювальних блоків одноканальних лінійних індукційних прискорювачів або одноканальних прискорювальних блоків, до...
Лінійний індукційний електродвигун ударної дії

Номер патенту: 23536
Опубліковано: 02.06.1998
Автори: Ель Юссеф Ібрагім Мослех, Болюх Володимир Федорович
МПК: H02K 41/025
Мітки: індукційний, лінійний, ударної, електродвигун, дії
Формула / Реферат:
1. Линейный индукционный электродвигатель ударного действия, содержащий размещенные на одном конце упор, а на другом конце - подвижный боек, коаксиально установленные между ними первичную, подключаемую к источнику электроэнергии обмотку, взаимодействующую с упором, и индуктивно связанный с ней и установленный с возможностью взаимодействия с бойком вторичный короткозамкнутый контур, содержащий токопроводящее плоское кольцо, центральная...
Попередній патент: Композиція трав’яного чаю від герпесу “продукт дієтичного харчування
Наступний патент: Спосіб експрес-діагностики еймеріїдозів і нематодозів м’ясоїдних тварин
Випадковий патент: Засоби, що викликають апоптоз, для лікування злоякісних новоутворень і імунних і аутоімунних захворювань