Реверсивний псевдоеліптичний підшипниковий вузол ковзання

Формула / Реферат
Псевдоеліптичний підшипниковий вузол ковзання, який складається із вкладиша у вигляді тонкостінної втулки з антифрикційним покриттям її внутрішньої поверхні, жорстко закріпленої в корпусі машини або в спеціальному корпусі підшипника, і цапфи, яка охоплюється вкладишем, який відрізняється тим, що внутрішній профіль вкладиша окреслений двома однаковими псевдопівеліпсами, причому кожна з більших осей псевдопівеліпсів повернута відносно вертикальної осі в протилежних напрямках на кут φа, крім того, розгорнуті відносно один одного псевдопівеліпси з'єднані між собою в межах кута 2φа дугою кола з радіусом ρ=(0,1…0,15)b, при цьому радіус-вектор r(φ), який визначає закон змінення псевдоеліптичної кривої внутрішньої поверхні вкладиша, описаний рівнянням
r(φ)=r+kδ(1+|cosφ|),
в якому значення функції cosφ в межах змінення кута φ від 0° до 180° слід приймати як додатні величини, де φа - кут, що враховує положення цапфи у вкладиші, що змінюється в межах 20°…63° в залежності від величини відносного ексцентриситету χ=0,4…0,95; ρ=b - радіус кривизни дуги кола, що стягує між собою псевдоеліптичні криві; b - велика піввісь псевдоеліпса; r - радіус цапфи; δ=b-r - радіальний зазор; k - коефіцієнт, що враховує змінення малої осі псевдоеліпса в межах 1/3≤k≤1/2.
Текст
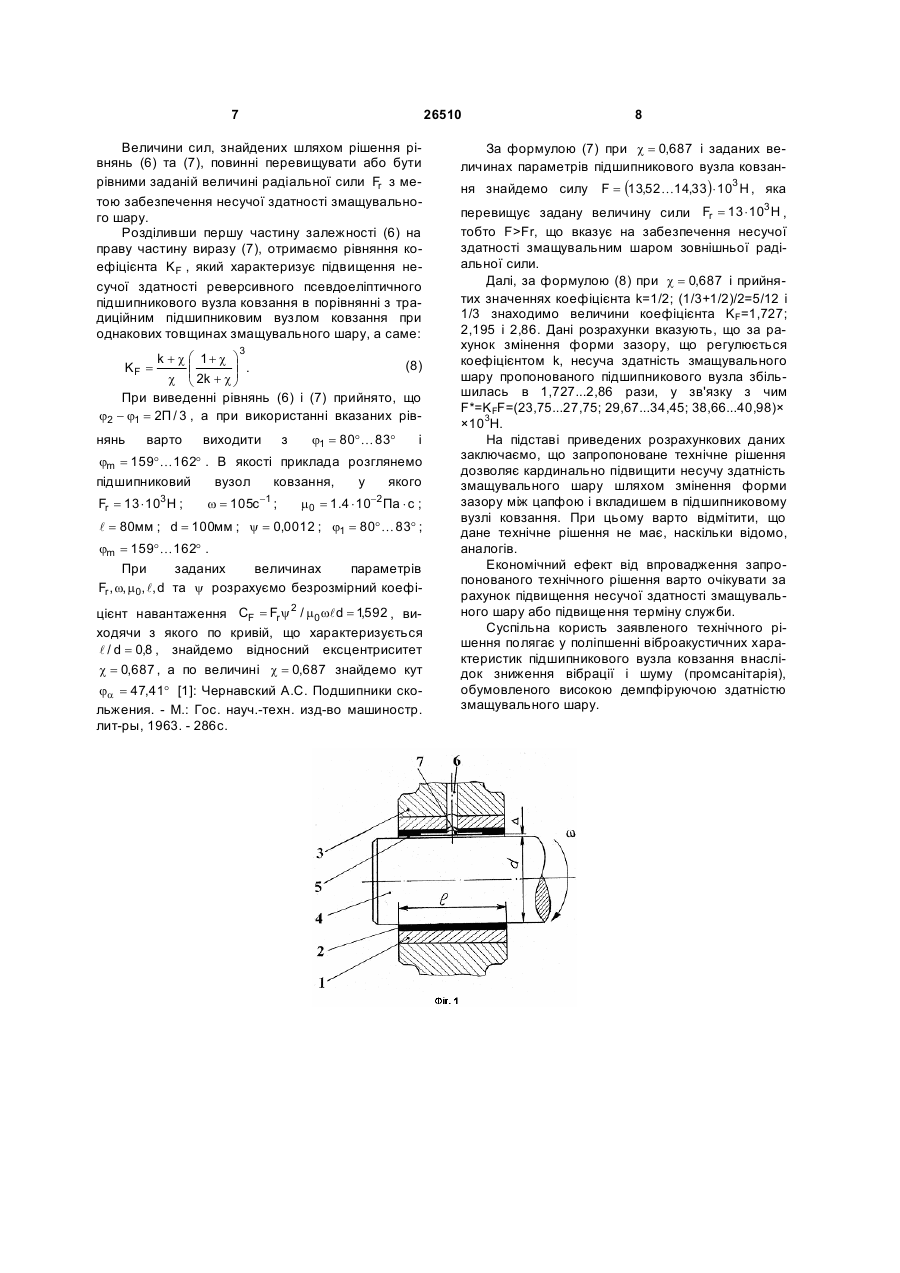
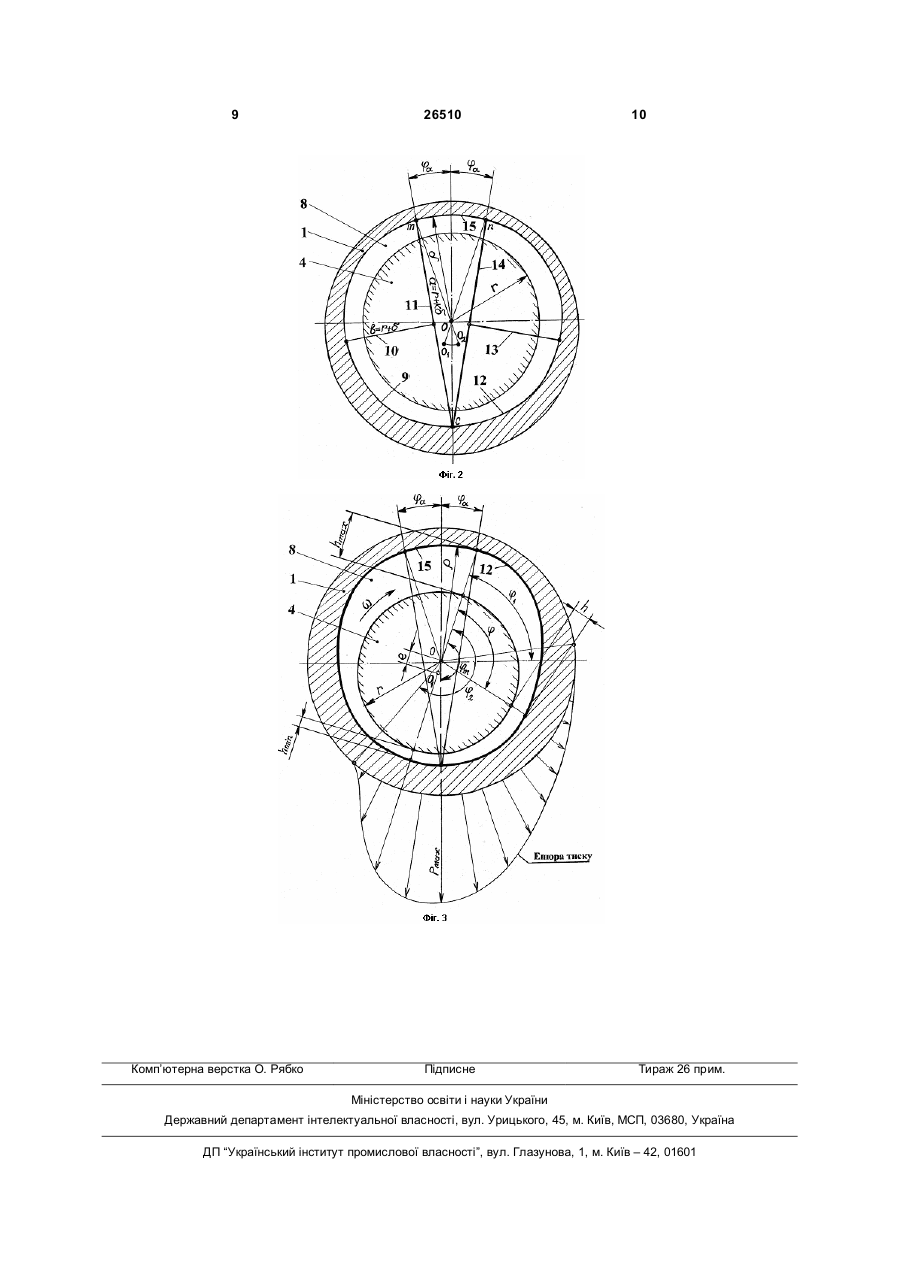
Псевдоеліптичний підшипниковий вузол ковзання, який складається із вкладиша у вигляді тонкостінної втулки з антифрикційним покриттям її внутрішньої поверхні, жорстко закріпленої в корпусі машини або в спеціальному корпусі підшипника, і цапфи, яка охоплюється вкладишем, який відрізняється тим, що внутрішній профіль вкладиша окреслений двома однаковими псевдопівеліпсами, причому кожна з більших осей псевдопівеліпсів повернута відносно вертикальної осі в протилежних напрямках на кут φа, крім того, розгорнуті від 3 26510 r (j) , який визначає закон змінення псевдоеліптичної кривої внутрішньої поверхні вкладиша, описаний рівнянням r (j) = r + kd 1+ cos j , ( ) в якому значення функції cos j в межах змінення кута j від 0° до 180° слід приймати в якості додатних величин, де ja - кут, що враховує положення цапфи у вкладиші, що змінюється в межах 20°...63° в залежності від величини відносного ексцентриситету c = 0,4 K 0,95; r = b - радіус кривизни дуги кола, що стягує між собою псевдоеліптичні криві; b - велика піввісь псевдоеліпса; r радіус цапфи; d = b - r - радіальний зазор; k - коефіцієнт, що враховує змінення малої вісі псевдоеліпса в межах 1 / 3 £ k £ 1 / 2 . Порівняльний аналіз з прототипом показує, що запропонований підшипниковий вузол ковзання відрізняється тим, що внутрішній профіль вкладишу окреслений двома однаковими псевдонапівеліпсами, причому кожна з більших осей псевдонапівеліпсів повернута відносно вертикальної осі в протилежних напрямках на кут ja , крім того, розгорнуті відносно один одного псевдонапівеліпси з'єднані між собою в межах кута 2ja дугою кола з радіусом r = (0,1K0,15)b , при цьому радіус-вектор r (j) , який визначає закон змінення псевдоеліптичної кривої внутрішньої поверхні вкладиша, описаний приведеним рівнянням. Порівняння технічного рішення, що заявляється, не лише з прототипом, але й з іншими технічними рішеннями в області техніки, не виявило в них ознак, відрізняючи технічне, що заявляється від прототипу, що дозволяє зробити висновок про відповідність критерію "винахідницький рівень" . На Фіг.1 зображено реверсивний псевдоеліптичний підшипниковий вузол ковзання, на Фіг.2 вкладиш з розгорнутими відносно один одного псевдонапівеліпсами і цапфа, на Фіг.3 - епюра гідродинамічного тиску реверсивного псевдоеліптичного підшипникового вузла ковзання. У відповідності з Фіг.1-3 маємо наступні позначення: d - діаметр цапфи; l - ширина підшипника, рівна довжині вкладиша; D - діаметральний зазор; w - кутова швидкість; r - радіус цапфи; a, b - мала та велика півосі псевдо еліпса; r (j) - радіус - вектор псевдоеліптичної кривої; j - поточний кут; ja - кут, що враховує положення цапфи у вкладиші; r - радіус кривизни дуги кола, що стягує між собою псевдоеліптичні криві; k - коефіцієнт, що враховує змінення малої осі псевдо еліпса; h, hmin , h max - поточна, мінімальна і максимальна товщина шару, що змащує; e - ексцентриситет; j1,j2 - кути початку та кінця області тертя; jm кут, при якому тиск в шарі, що змащує досягає максимального значення Pmax , точка О - положення центру цапфи в середньому не навантаженому стані; точка О1 - положення центра цапфи в 4 робочому стані при її обертанні в одну сторону (за годинниковою стрілкою); О2 - положення центра цапфи в робочому стані при її обертанні в протилежну сторону, тобто против годинникової стрілки. Реверсивний псевдоеліптичний підшипниковий вузол ковзання складається з псевдоеліптичного вкладиша 1, на внутрішній поверхні якого нанесено антифрикційне покриття 2. Вкладиш жорстко з'єднаний з корпусом 3 машини. Всередині вкладиша розміщена цапфа 4, що уявляє собою опорну частину валу. Між вкладишем і цапфою є діаметральний зазор 5, що дорівнює D . Через корпус машини і вкладиш проходить отвір 6 для підводу змазки, яка під тиском попадає в змащувальну канавку 7. Зі змащувальної канавки змазка потрапляє в порожнину 8, яка знаходиться між цапфою і вкладишем. Псевдоеліптична крива 9 лівого напівпсевдоеліпса характеризується малою 10 і більшою 11 півосями. Псевдоеліптична крива 12 правого напівпсевдоеліпса ідентична лівій псевдоеліптичній кривій 12, у зв'язку з чим її мала 13 і велика 14 півосі рівні півосям відповідно 10 і 11. Великі осі лівого і правого псевдонапівеліпсів розгорнуті відносно точки с за годинниковою і против годинникової стрілки на кути ja , рівні один одному. При цьому крайні точки m та n, що належать великим осям вказаних псевдонапівеліпсів стягнуті між собою дугою 15, проведеною радіусом r. Реверсивний псевдоеліптичний підшипниковий вузол ковзання працює наступним чином. При обертанні цапфи 4, що належить валу, з кутовою швидкістю w через вкладиш 1, покритий зсередини тонким шаром антифрикційного покриття 2, на корпус 3 машини передається зі сторони вала радіальна сила Fr . При цьому через радіальний отвір 6 і змащувальну канавку 7 в зазор 5 потрапляє масло, яке заповнює порожнину 8, розташовану між цапфою і вкладишем. У процесі експлуатації реверсивного псевдоеліптичного підшипникового вузла ковзання центр О цапфи займає положення центра О1, якщо вал обертається за годинниковою стрілкою. При обертанні вала против годинникової стрілки центр О цапфи займає положення центра О2. Цапфа, що обертається з кутовою швидкістю w , затягує змазку в звужуючий зазор, що знаходиться між цапфою і вкладишем, у зв'язку з чим утворюється зона підвищеного тиску. Характер розподілу зони підвищеного тиску по дузі характеризується епюрою гідродинамічного тиску. Результуюча сила вказаної епюри тиску характеризує величину сили, що називається несучою здатністю змащувального шару, яка зрівноважується зовнішньою силою Fr . Приведена на Фіг.3 епюра гідродинамічного тиску характерна для обертання цапфи за годинниковою стрілкою (центр О1). При обертанні цапфи против годинникової стрілки (центр О2) виникає аналогічна за формою і величиною епюра гідро 5 26510 динамічного тиску, зміщена в ліву сторону вкладиша, що має конформне відображення. Таким чином, працездатність підшипникового вузла ковзання забезпечується незалежно від напрямку обертання цапфи, у зв'язку з чим запропонований підшипниковий вузол ковзання є реверсивним. F* = 3m 0wl d y 2 j2 j òj1 òj1 де m0 - в'язкість масла при атмосферному ти 3m 0wld y 2 Для оцінки ефективності і порівняння пропонованого технічного рішення з традиційним підшипниковим вузлом ковзання автором отримано рівняння гідродинамічної сили тиску F*, яке має вигляд [k + (k + c) cos j ] - [k + (k + c ) cos jm ] dj[- cos(j + j )dj], a [k + (k + c) cos j ]3 ску, Мпа·с; w - кутова швидкість цапфи; y = d / r відносний радіальний зазор; c = e / d - відносний ексцентриситет; k - коефіцієнт, що враховує змінення малої осі псевдо еліпса; е - ексцентриситет; j - поточний кут; jm - кут, при якому тиск у змащувальному шарі досягає максимального значен F= 6 (1) ня; j1,j2 - кути початку і кінця області тертя; ja кут, що враховує цапфи у вкладиші. Рівняння (1) застосовується до традиційного підшипникового вузла тертя, загальновідоме в класичній гідродинамічній теорії змазки, і воно має вигляд: é ù j2 j (1 + c cos j) - (1 + c cos jm ) ú dj[- cos(j + ja )dj]. òj1 òj1 ê 3 (1 + c cos j) ê ú ë û Рівняння (1) і (2) являються не інтегрованими. У зв'язку з цим рішення вказаних рівнянь виконаємо наближено. З цією метою введемо в розгляд нову зміну величину a = j / 2Пn , що являється безрозмірною величиною дуже малого прядку, а також нові безрозмірні границі інтегрування (2) j1= j / 2Пn і j2 = j / 2Пn малого порядку, де 2Пn - кут обертання, що визначається в одиницю часу, наприклад, у хвилину; n - частота обертання, об/хв. При цьому допускаємо, що j1 £ j £ j2; j1 / 2Пn £ a £ j2 / 2Пn; a1 £ a £ a2; j = 2Пn a; dj = 2Пnd a . Підінтегральні функції, що стоять в перших і других квадратних скобках рівнянь (1) і (2), об означимо наступним чином: k + (k + c ) cos j - [k + (k + c ) cos jm ] F1* = ; (3) 3 k + (k + c ) cos j [ [ ] ] F1* = F1 * a =0 + a ¶F1 * ¶a F1* = F a =0 +a 1 ¶F 1 ¶a a =0 + a =0 + З аналізу функцій (3) і (4), Розкладених в два ряди Маклорена, слідує, що при інтегруванні достатньо взяти в якості розгляду другі члени кожного з рядів, так як перші члени рівні нулю, а третій і наступні безкінечно малі в порівнянні з другими членами рядів. Потім, ввівши в рівняння (1) і (2) замість кута j безрозмірний кут a , a замість кута j1 безрозмірну границю інтегрування a1 , знайдемо вирази других інтегралів з границями інтегрування від j до j1 , допускаючи, що параметр a = 0 . (1 + c cosj) - (1+ c cos jm ) ; (1+ c cos j)3 F2 * = F2 = - cos(j + j a ). F1 = (4) (5) Спочатку кожну з функцій (3) і (4) розкладемо в свій ряд Маклорена: a 2 ¶ 2F1 * × 2! ¶a 2 a2 ¶ 2F1 × 2! ¶a 2 a =0 + L + a =0 + L + a n ¶nF1 * × n! ¶an an ¶ nF 1 × n! ¶an a=0 a =0 ; ; Далі, ввівши в розгляд замість параметрів j , j1 та j2 безрозмірні параметри a , a1 та a 2 , розклавши при цьому функцію (5) в ряд Маклорена, запишемо, опускаючи проміжні рішення і перетворення, в кінцевому вигляді рівняння гідродинамічних сил: 2pm0 wld(k + c ) j (1 - cos jm ) cos ja ; F* = (6) (2k + c)3 y 2 1 2pm0 wld c j (1 - cos jm )cos ja . F= (7) (1+ c)3 y2 1 7 26510 Величини сил, знайдених шляхом рішення рівнянь (6) та (7), повинні перевищувати або бути рівними заданій величині радіальної сили Fr з метою забезпечення несучої здатності змащувального шару. Розділивши першу частину залежності (6) на праву частину виразу (7), отримаємо рівняння коефіцієнта K F , який характеризує підвищення несучої здатності реверсивного псевдоеліптичного підшипникового вузла ковзання в порівнянні з традиційним підшипниковим вузлом ковзання при однакових товщинах змащувального шару, а саме: 3 k + c æ 1+ c ö (8) ç ÷ . c ç 2k + c ÷ è ø При виведенні рівнянь (6) і (7) прийнято, що j2 - j1 = 2П / 3 , а при використанні вказаних рівKF = нянь варто виходити з j1 = 80° K 83° і jm = 159° K162° . В якості приклада розглянемо підшипниковий вузол ковзання, у якого Fr 13 × 103 H ; = w 105c -1 ; = m= 1.4 × 10-2 Па × с ; 0 = 80мм ; = 100мм ; y 0,0012 ; j1 80°K 83° ; l d = = jm 159° K162° . = При заданих величинах параметрів Fr , w, m0, l, d та y розрахуємо безрозмірний коефі цієнт навантаження CF = Fr y 2 / m0 wl d = 1,592 , виходячи з якого по кривій, що характеризується l / d = 0,8 , знайдемо відносний ексцентриситет c = 0,687 , а по величині c = 0,687 знайдемо кут ja = 47,41° [1]: Чернавский А.С. Подшипники скольжения. - М.: Гос. науч.-техн. изд-во машиностр. лит-ры, 1963. - 286с. 8 За формулою (7) при c = 0,687 і заданих величинах параметрів підшипникового вузла ковзання знайдемо силу F = (13,52K14,33) × 103 H , яка 3 перевищує задану величину сили Fr = 13 × 10 H , тобто F>Fr, що вказує на забезпечення несучої здатності змащувальним шаром зовнішньої радіальної сили. Далі, за формулою (8) при c = 0,687 і прийнятих значеннях коефіцієнта k=1/2; (1/3+1/2)/2=5/12 і 1/3 знаходимо величини коефіцієнта KF=1,727; 2,195 і 2,86. Дані розрахунки вказують, що за рахунок змінення форми зазору, що регулюється коефіцієнтом k, несуча здатність змащувального шару пропонованого підшипникового вузла збільшилась в 1,727...2,86 рази, у зв'язку з чим F*=KFF=(23,75...27,75; 29,67...34,45; 38,66...40,98)× ×103Н. На підставі приведених розрахункових даних заключаємо, що запропоноване технічне рішення дозволяє кардинально підвищити несучу здатність змащувального шару шляхом змінення форми зазору між цапфою і вкладишем в підшипниковому вузлі ковзання. При цьому варто відмітити, що дане технічне рішення не має, наскільки відомо, аналогів. Економічний ефект від впровадження запропонованого технічного рішення варто очікувати за рахунок підвищення несучої здатності змащувального шару або підвищення терміну служби. Суспільна користь заявленого технічного рішення полягає у поліпшенні віброакустичних характеристик підшипникового вузла ковзання внаслідок зниження вібрації і шуму (промсанітарія), обумовленого високою демпфіруючою здатністю змащувального шару. 9 Комп’ютерна верстка О. Рябко 26510 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюReversing quasielliptic sliding bearing assembly
Автори англійськоюPopov Oleksii Pavlovych
Назва патенту російськоюРеверсивный псевдоэллиптический подшипниковый узел скольжения
Автори російськоюПопов Алексей Павлович
МПК / Мітки
МПК: F16C 17/00
Мітки: підшипниковий, ковзання, вузол, псевдоеліптичний, реверсивний
Код посилання
<a href="https://ua.patents.su/5-26510-reversivnijj-psevdoeliptichnijj-pidshipnikovijj-vuzol-kovzannya.html" target="_blank" rel="follow" title="База патентів України">Реверсивний псевдоеліптичний підшипниковий вузол ковзання</a>
Двоклиновий псевдоеліптичний підшипниковий вузол ковзання
Номер патенту: 26507
Опубліковано: 25.09.2007
Автор: Попов Олексій Павлович
МПК: F16C 17/00
Мітки: підшипниковий, двоклиновий, вузол, псевдоеліптичний, ковзання
Формула / Реферат:
Підшипниковий вузол ковзання, що складається із вкладиша у вигляді тонкостінної втулки з антифрикційним покриттям її внутрішньої поверхні, жорстко закріпленої в корпусі машини або в спеціальному корпусі підшипника, та цапфи, що охоплюється вкладишем, який відрізняється тим, що вкладиш в нормальному перерізі виконаний у вигляді псевдоеліпса, що має малу b+k+δ та велику а=r+kδ півосі, крім того, велика вісь еліпса 2b розташована в...
Псевдоеліптичний підшипниковий вузол ковзання
Номер патенту: 22789
Опубліковано: 25.04.2007
Автор: Попов Олексій Павлович
МПК: F16C 17/00
Мітки: псевдоеліптичний, вузол, ковзання, підшипниковий
Формула / Реферат:
Підшипниковий вузол ковзання, який складається із циліндричного вкладиша у вигляді тонкостінної втулки з антифрикційним покриттям, жорстко закріпленого в корпусі машини, і який охоплюється вкладишем вала, який відрізняється тим, що внутрішня поверхня вкладиша виконана псевдоеліптичною, у зв'язку з чим псевдоеліпс характеризується малою і великою
Підшипниковий вузол ковзання з плаваючою втулкою
Номер патенту: 26251
Опубліковано: 10.09.2007
Автор: Попов Олексій Павлович
МПК: F16C 17/00
Мітки: втулкою, підшипниковий, ковзання, плаваючою, вузол
Формула / Реферат:
Підшипниковий вузол ковзання, який складається із цапфи і охоплюючої її плаваючої втулки, яка розташована у внутрішній порожнині вкладиша, жорстко закріпленого у спеціальному корпусі підшипника або безпосередньо в корпусі машини, який відрізняється тим, що внутрішня циліндрична поверхня плаваючої втулки по всій довжині виконана як така, що складається із заглибин і виступів, що послідовно чергуються в окружному напрямку, причому в точках...
Підшипниковий вузол ковзання

Номер патенту: 34860
Опубліковано: 16.02.2004
Автори: Кондрашов Олексій Вікторович, Гусев Володимир Владіленович, Молчанов Олександр Дмитрович, Горкуша Анатолій Юхимович, Вяльцев Микола Васильович
МПК: F16C 27/00
Мітки: підшипниковий, ковзання, вузол
Формула / Реферат:
1. Підшипниковий вузол ковзання, який має корпус, у розточку якого вставлений вкладиш, керамічні вставки та вал, який відрізняється тим, що містить додатково змазувальні вставки, при цьому керамічні та змазувальні вставки встановлені почергово на еластичній основі у виточці вала і закріплені кільцем і гайкою.2. Підшипниковий вузол ковзання за п. 1, який відрізняється тим, що радіус кривизни робочої поверхні керамічних вставок менший за...
Підшипниковий вузол ковзання
Номер патенту: 22484
Опубліковано: 25.04.2007
Автор: Попов Олексій Павлович
МПК: F16C 17/04
Мітки: підшипниковий, вузол, ковзання
Формула / Реферат:
Підшипниковий вузол ковзання, який складається з вала і корпусу підшипника з вкладишем, жорстко з'єднаного з корпусом машини, який відрізняється тим, що корпус підшипника з вкладишем виконаний самовстановлюваним відносно корпусу машини, у зв'язку з чим зовнішня поверхня корпусу підшипника є випуклою з радіусом кривизни RН, а внутрішня поверхня корпусу машини увігнутою з радіусом кривизни RВ, причому RН>RВ, крім того, корпус підшипника...
Попередній патент: Візок багатовісний залізничний
Наступний патент: Спосіб демонтажу опорної частини міксера для рідкого чавуну
Випадковий патент: Спосіб отримання монокристалів cdga2se4 розчин-розплавним методом