Пристрій автоматизованого контролю статичних та квазідинамічних характеристик крокових двигунів
Номер патенту: 35497
Опубліковано: 25.09.2008
Формула / Реферат
Пристрій автоматизованого контролю статичних та квазідинамічних характеристик крокових двигунів, що містить підсилювач, який відрізняється тим, що в нього введено мікропроцесорний контролер, перші одинадцять виходів якого з'єднані з одинадцятирозрядною вихідною шиною, другі вісім виходів підключені до восьмирозрядної вихідної шини, третій вихід з'єднаний з входом послідового інтерфейсу, що підключений до персонального комп'ютера через системний канал та з'єднаний з першим входом мікропроцесорного контролера, систему керування кроковим двигуном, яка підключена до мікропроцесорного контролера через одинадцятирозрядну вихідну шину, чотири виходи якої з'єднані з чотирирозрядною вихідною шиною, яка підключена до крокового двигуна, що закріплений на станині, систему керування електромагнітною муфтою, яка підключена до мікропроцесорного контролера через восьмирозрядну вихідну шину, два виходи якої підключені до електромагнітної муфти, яка закріплена на станині і зв'язана з валом крокового двигуна через першу пружну муфту спряження, та валом сенсора кута повороту, що закріплений на станині, через другу пружну муфту спряження, перший вихід сенсора кута повороту з'єднаний з п'ятим входом мікропроцесорного контролера, другий вихід сенсора кута повороту підключений до першого входу D-тригера, третій вихід сенсора кута повороту з'єднаний з четвертим входом мікропроцесорного контролера та другим входом D-тригера, вихід якого підключений до третього входу мікропроцесорного контролера, тензорезистивний сенсор зусилля, що закріплений на станині і зв'язаний з корпусом електромагнітної муфти, вихід якого з'єднаний з входом підсилювача, вихід якого підключений до другого входу мікропроцесорного контролера.
Текст
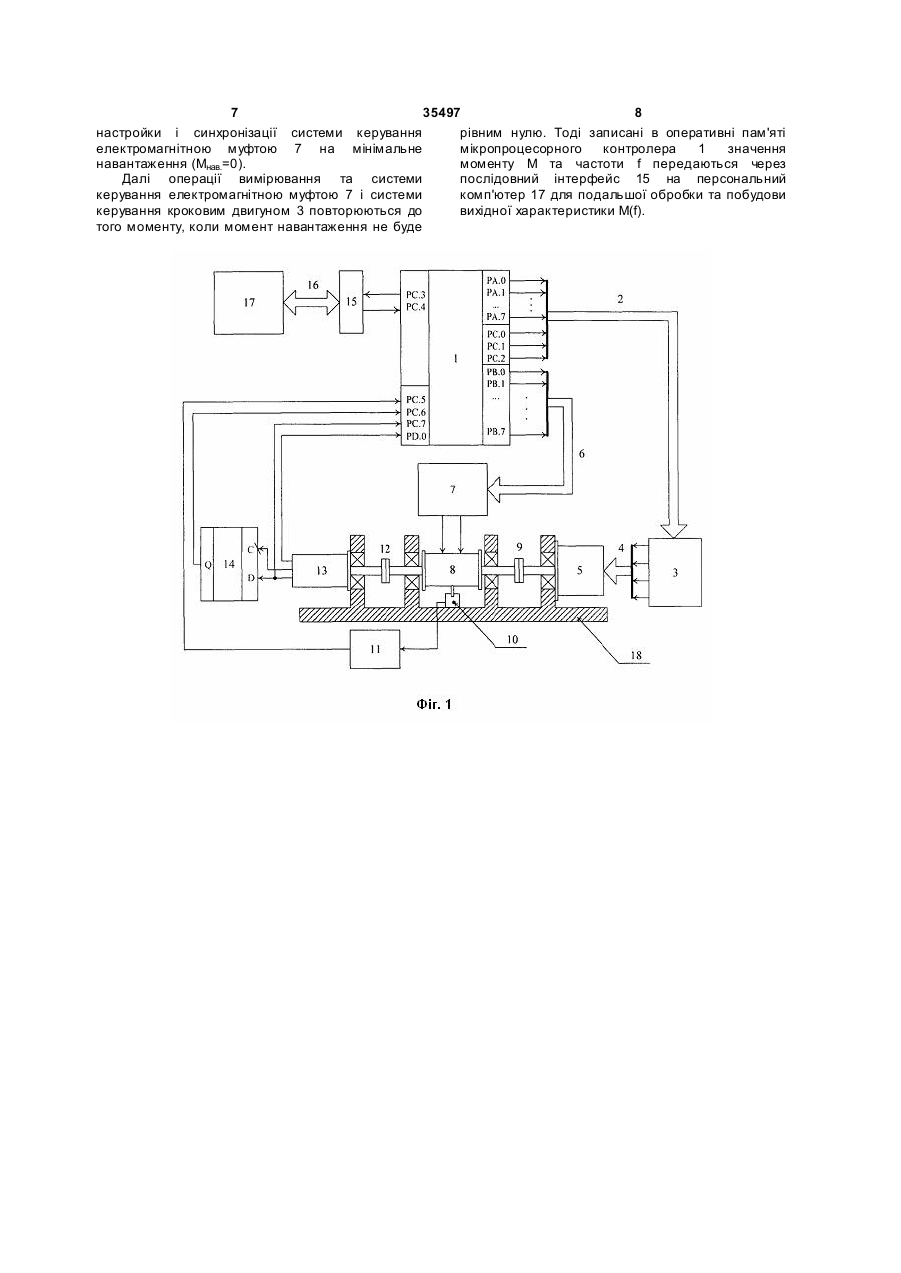
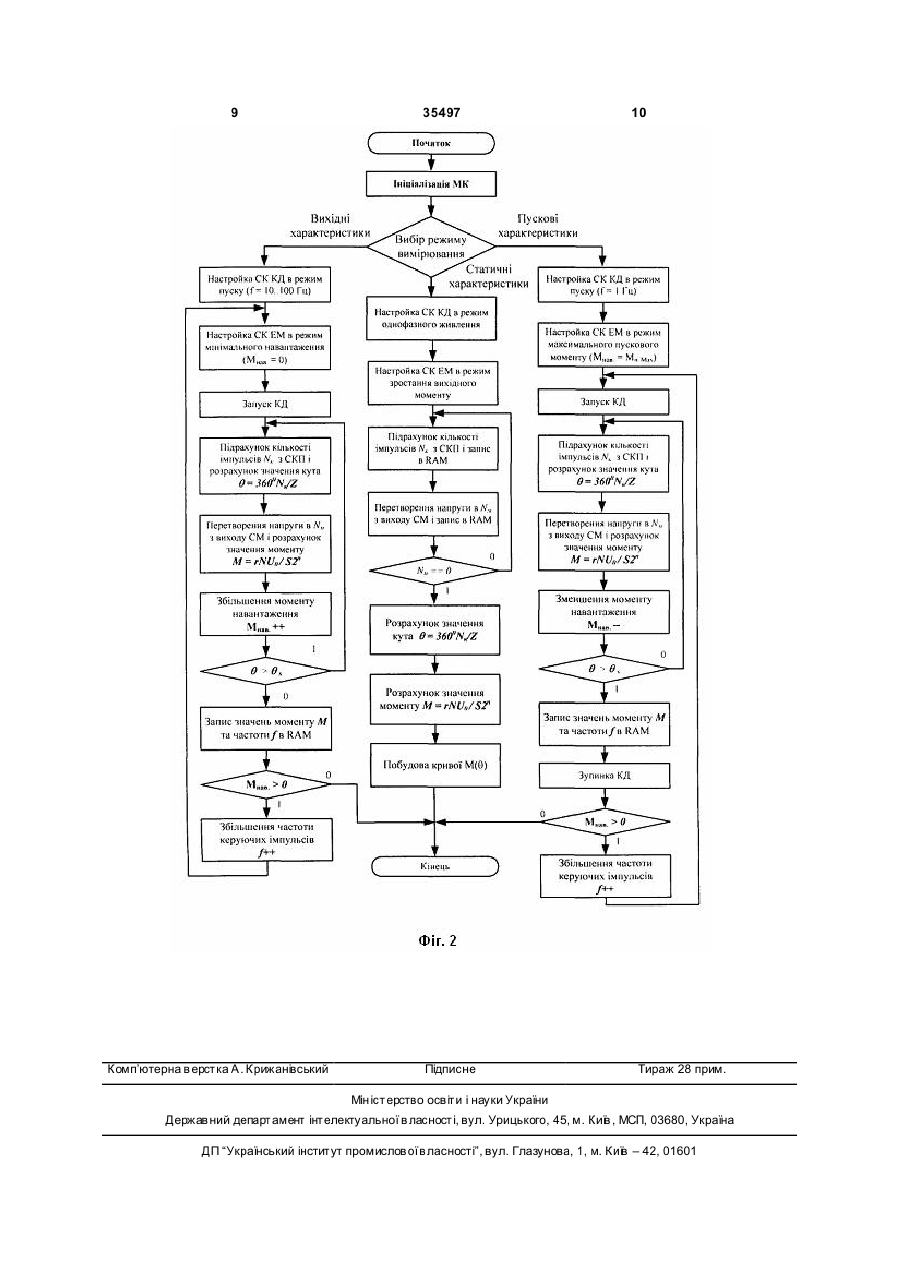
Пристрій автоматизованого контролю статичних та квазідинамічних характеристик крокових двигунів, що містить підсилювач, який відрізняє ться тим, що в нього введено мікропроцесорний контролер, перші одинадцять виходів якого з'єднані з одинадцятирозрядною вихідною шиною, др угі вісім виходів підключені до восьмирозрядної вихідної шини, третій вихід з'єднаний з входом послідового інтерфейсу, що підключений до персонального комп'ютера через системний канал та з'єднаний з першим входом мікропроцесорного контролера, систему керування кроковим двигуном, яка підключена до мікропроцесорного контролера через одинадцятирозрядну вихідн у шину, чотири ви ходи якої з'єднані з чотирирозрядною вихідною шиною, U 2 35497 1 СТАТИЧНИХ (11) (54) ПРИСТРІЙ АВТОМАТИЗОВАНОГО ХАРАКТЕРИСТИК КРОКОВИХ ДВИГУНІВ UA ДЕРЖАВНИЙ Д ЕПАРТАМЕНТ ІНТЕЛ ЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС (19) МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ 3 35497 4 використання обертового трансформатора, в автоматизованого контролю статичних та якості сенсора кута, ста тична характеристика квазідинамічних характеристик крокових двигунів. якого нелінійна, та застосування редуктора, Пристрій містить: 1 - мікропроцесорний наявність люфтів в якому призводить до контролер, 2 - одинадцятирозрядна вихідна шина, виникнення додаткових коливань та вібрації 3 - система керування кроковим двигуном, 4 ротора крокового двигуна, що підвищує по хибку чотирьох розрядна вихідна шина, 5 - кроковий вимірювання як кута повороту, так і обертального двигун, 6 - восьмирозрядна вихідна шина, 7 моменту. Також описаний пристрій не забезпечує система керування електромагнітною муфтою, 8 повну автоматизацію процесу вимірювання електромагнітна муфта, 9 - перша пружна муфта статичних характеристик та не дозволяє спряження, 10 - тензорезистивний сенсор зусилля, проводити контролю квазідинамічних 11 - підсилювач, 12 - друга пружна муфта характеристик крокових двигунів. спряження, 13 - сенсор кута повороту, 14 - DВ основу корисної моделі поставлено задачу тригер, 15 - послідовний інтерфейс, 16 - системний створення пристрою автоматизованого контролю канал, 17 - персональний комп'ютер, 18 - станина. статичних та квазідинамічних характеристик При цьому мікропроцесорний контролер 1, перші крокових двигунів, в якому за рахунок введення одинадцять виходів якого з'єднані з нових блоків та зв'язків між ними досягається одинадцятирозрядною вихідною шиною 2, яка можливість лінеаризувати статичну підключена до системи керування кроковим характеристику та уникнути додаткових коливань і двигуном 3, чотири виходи якої з'єднані з вібрацій ротора крокового двигуна, за рахунок чого чотирьохрозрядною вихідною шиною 4, яка підвищується точність вимірювання. Крім того, підключена до крокового двигуна 5, що досягається підвищення швидкодії та повна закріплений на станині 18, другі вісім виходів автоматизація процесу вимірювання статичних та з'єднані з восьмирозрядною вихідною шиною 6, квазідинамічних характеристик. яка підключена до системи керування Поставлена задача вирішується тим, що в електромагнітною муфтою 7, два виходи якої пристрій для вимірювання статичних з'єднані з електромагнітною муфтою 8, що характеристик, що містить підсилювач, введено закріплена на станині 18, з корпусом якої зв'язаний мікропроцесорний контролер, перші одинадцять тензорезистивний сенсор зусилля 10, вихід якого виходів якого з'єднані з одинадцятирозрядною підключений до входу підсилювача 11, вихід якого вихідною шиною, др угі вісім виходів підключені до з'єднаний з другим входом мікропроцесорного восьмирозрядної вихідної шини, третій вихід контролера 1, і зв'язана з валом крокового двигуна з'єднаний з входом послідового інтерфейсу, що 5 через першу пружну муфту спряження 9, та підключений до персонального комп'ютера через валом сенсора кута повороту 13, що закріплений системний канал та з'єднаний з першим входом на станині 18, через другу пружну муфту мікропроцесорного контролера, систему керування спряження 12, перший вихід якого підключений до кроковим двигуном, яка підключена до п'ятого входу мікропроцесорного контролера 1, мікропроцесорного контролера через другий вихід з'єднаний з першим входом Dодинадцятирозрядну вихідн у шину, чотири ви ходи тригера 14, третій вихід підключений до якої з'єднані з чотирьохрозрядною вихідною четвертого входу мікропроцесорного контролера 1 шиною, яка підключена до крокового двигуна, що та другого входу D-тригера 14, вихід якого закріплений на станині, систему керування з'єднаний з третім входом мікропроцесорного електромагнітною муфтою, яка підключена до контролера 1, третій вихід якого підключений до мікропроцесорного контролера через входу послідового інтерфейсу 15, що з'єднаний з восьмирозрядну вихідну шину, два ви ходи якої персональним комп'ютером 17 через системний підключені до електромагнітної муфти, яка канал 16, і своїм виходом підключений до першого закріплена на станині і зв'язана з валом крокового входу мікропроцесорного контролера 1. двигуна через першу пружну муфту спряження, та Пристрій працює наступним чином. Після валом сенсора кута повороту, що закріплений на подачі напруги живлення та ініціалізації станині, через другу пр ужну муфту спряження, мікропроцесорного контролера 1, на його перший перший вихід сенсора кута повороту з'єднаний з вхід надходить сигнал з персонального комп'ютера п'ятим входом мікропроцесорного контролера, 17 через послідовний інтерфейс 15 про вибір другий ви хід сенсора кута повороту підключений режиму вимірювання. У випадку, коли даний до першого входу D-тригера, третій вихід сенсора сигнал відповідає режиму вимірювання статичних кута повороту з'єднаний з четвертим входом характеристик, на перших одинадцяти виходах мікропроцесорного контролера та другим входом мікропроцесорного контролера 1 формується D-тригера, вихід якого підключений до третього сигнали настройки та синхронізації системи входу мікропроцесорного контролера, керування кроковим двигуном 3 в режимі тензорезистивний сенсор зусилля, що закріплений живлення однієї фази, а на других восьми виходах на станині і зв'язаний з корпусом електромагнітної з'являється сигнали настройки та синхронізації муфти, вихід якого з'єднаний з входом системи керування електромагнітною муфтою 7 в підсилювача, вихід якого підключений до другого режимі лінійного зростання вихідного моменту. входу мікропроцесорного контролера. Після цього вал крокового двигуна 5 почне На Фіг.1 подана структурна схема пристрою повертатися, що призведе до обертання вала автоматизованого контролю статичних та сенсора кута повороту 13, на першому виході квазідинамічних характеристик крокових двигунів, якого сформуються прямокутні імпульси, кількість на Фіг.2 представлено алгоритм роботи пристрою яких Nk пропорційна куту відхилення q, і які 5 35497 6 підраховує мікропроцесорний контролер 1 та q>qs, (3) записує у вн утрішню оперативну пам'ять. Односно де qs - номінальне значення кроку крокового з цим, на виході тензорезистивного сенсора двигуна 5. зусилля 10 з'являється напруга, що пропорційна Якщо вона не виконується, тобто двигун не моменту електромагнітної муфти 8, яка може запуститися при заданому навантаженні і підсилюється підсилювачем 11 та потрапляє на його пусковий момент М
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automated control of static and quasi-dynamical characteristics of stepping motors
Автори англійськоюKukharchuk Vasyl Vasyliovych, Usov Viktor Vasyliovych
Назва патенту російськоюУстройство автоматизированного контроля статических и квазидинамических характеристик шаговых двигателей
Автори російськоюКухарчук Василий Васильевич, Усов Виктор Васильевич
МПК / Мітки
МПК: G01B 11/26
Мітки: автоматизованого, двигунів, характеристик, пристрій, квазідинамічних, контролю, статичних, крокових
Код посилання
<a href="https://ua.patents.su/5-35497-pristrijj-avtomatizovanogo-kontrolyu-statichnikh-ta-kvazidinamichnikh-kharakteristik-krokovikh-dviguniv.html" target="_blank" rel="follow" title="База патентів України">Пристрій автоматизованого контролю статичних та квазідинамічних характеристик крокових двигунів</a>
Пристрій для контролю робочого ресурсу силових статичних конденсаторів
Номер патенту: 58115
Опубліковано: 15.07.2003
Автори: Грабко Володимир Віталійович, Боцула Мирослав Павлович, Мокін Борис Іванович
МПК: G01R 17/00
Мітки: ресурсу, силових, робочого, контролю, конденсаторів, пристрій, статичних
Формула / Реферат:
Пристрій для контролю робочого ресурсу силових статичних конденсаторів, що містить сенсор комутації, блок установки нуля, віднімаючий лічильник імпульсів, дешифратор, перший і другий генератори імпульсів, перший, другий і третій лічильники імпульсів, сенсор напруги, перший і другий аналого-цифрові перетворювачі, блок пам'яті, перетворювач Фур'є, арифметичний блок, перший функціональний блок, перший і другий регістри, комутатор, перший і...
Пристрій для контролю робочого ресурсу силових статичних конденсаторів
Номер патенту: 58114
Опубліковано: 15.07.2003
Автори: Боцула Мирослав Павлович, Грабко Володимир Віталійович, Мокін Борис Іванович
МПК: G01R 17/00
Мітки: конденсаторів, силових, статичних, пристрій, робочого, ресурсу, контролю
Формула / Реферат:
Пристрій для контролю робочого ресурсу силових статичних конденсаторів, що містить сенсор комутації, блок установки нуля, віднімаючий лічильник імпульсів, дешифратор, перший і другий генератори імпульсів, перший, другий і третій лічильники імпульсів, сенсор напруги, перший і другий аналого-цифрові перетворювачі, блок пам'яті, перетворювач Фур'є, арифметичний блок, перший функціональний блок, регістр, комутатор, перший і другий логічні...
Пристрій для контролю робочого ресурсу силових статичних конденсаторів
Номер патенту: 58116
Опубліковано: 15.07.2003
Автори: Грабко Володимир Віталійович, Боцула Мирослав Павлович, Мокін Борис Іванович
МПК: G01R 17/00
Мітки: ресурсу, робочого, статичних, конденсаторів, силових, контролю, пристрій
Формула / Реферат:
Пристрій для контролю робочого ресурсу силових статичних конденсаторів, що містить сенсор комутації, блок установки нуля, віднімаючий лічильник імпульсів, дешифратор, перший і другий генератори імпульсів, перший, другий і третій лічильники імпульсів, сенсор напруги, перший і другий аналого-цифрові перетворювачі, блок пам'яті, перетворювач Фур'є, арифметичний блок, перший функціональний блок, перший і другий регістри, комутатор, перший і...
Пристрій для контролю робочого ресурсу силових статичних конденсаторів
Номер патенту: 35143
Опубліковано: 15.03.2001
Автори: Боцула Мирослав Павлович, Мокін Борис Іванович, Грабко Володимир Віталійович
МПК: G01R 31/12
Мітки: конденсаторів, статичних, силових, пристрій, контролю, робочого, ресурсу
Формула / Реферат:
Пристрій для контролю робочого ресурсу силових статичних конденсаторів, що містить перший масштабуючий підсилювач, аналого-цифровий перетворювач, цифровий суматор, перший регістр, індикатор, який відрізняється тим, що в нього введені датчик напруги, перетворювач змінної напруги в постійну напругу, пристрій вибірки-зберігання, п'ять функціональних перетворювачів, чотири масштабуючих підсилювачі, аналоговий суматор, блок задания ресурсу,...
Пристрій автоматизованого контролю спицевих коліс
Номер патенту: 29732
Опубліковано: 15.11.2000
Автори: Бондар Олексій Іванович, Пасічник Віталій Анатолійович
МПК: B60B 31/00
Мітки: коліс, контролю, пристрій, автоматизованого, спицевих
Текст:
...25, 26, 27, 28. Вісі 14, 21, 24 встановлені горизонтально з можливістю повороту в корпусі 10, напівпризми 12, 13 жорстко закріплені на вісях 14, важіль 20 жорст ко закріплений на вісі 21, заслонки 22, 23 жорстко закріплені на вісях 24, керуючі електромагніти 15 і 16, пружина 19 та роздільна скоба 11 жорстко закріплені на корпусі 10, фіксатори 17 і 18 з'єднані з керуючими електромагнітами 15, 16 з можливістю поступального переміщення,...
Попередній патент: Судно з пристроєм забезпечення його плавучості (непотоплюваності)
Наступний патент: Оптико-частотний температурний сенсор
Випадковий патент: Пристрій для забезпечення прохідності трубчастих органів