Спосіб отримання плоских, тримірних і стереоскопічних зображень поверхні об’єктів та пристрій для його здійснення
Номер патенту: 36089
Опубліковано: 16.04.2001
Автори: Бородін Микола Олексійович, Макарчук Володимир Миколайович
Текст
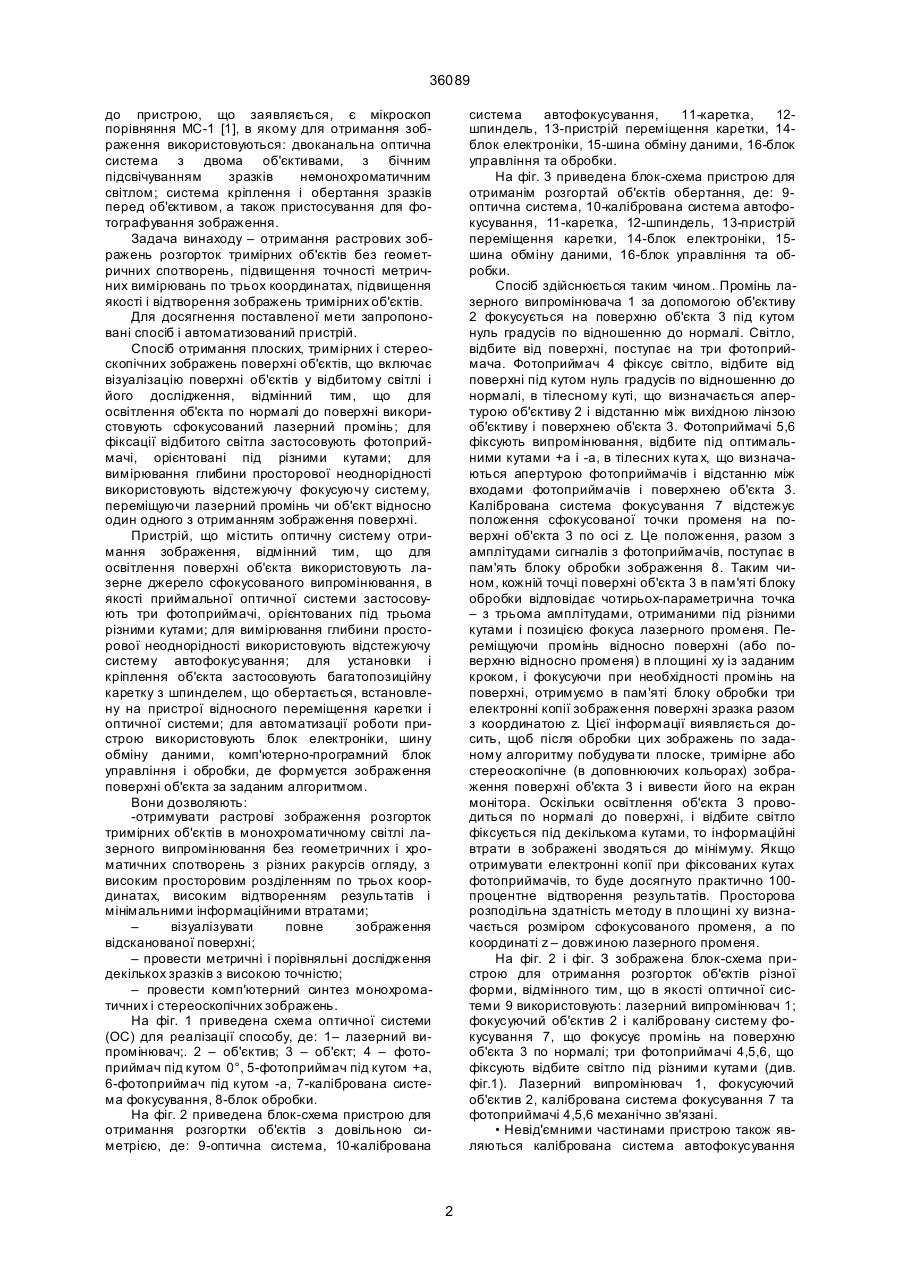
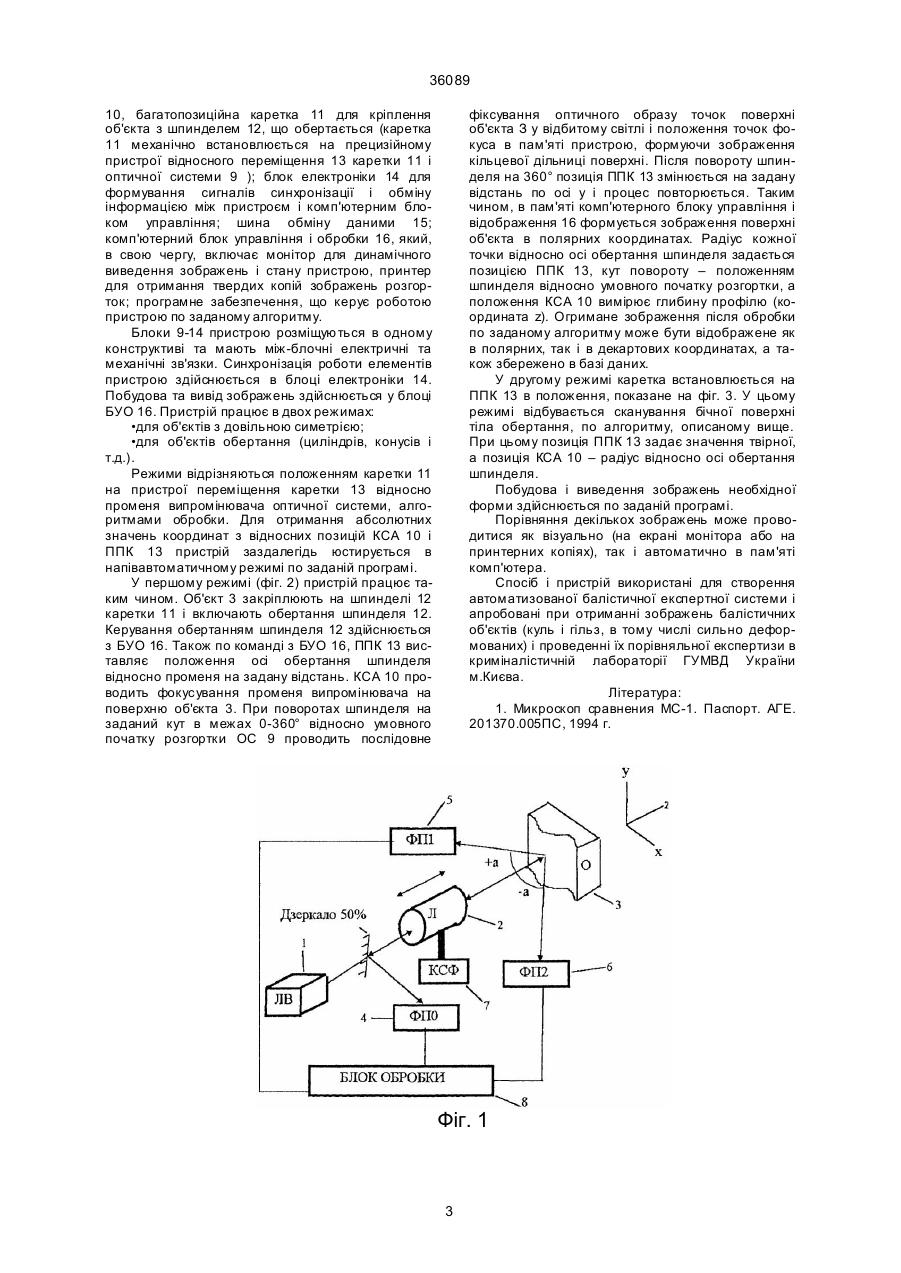
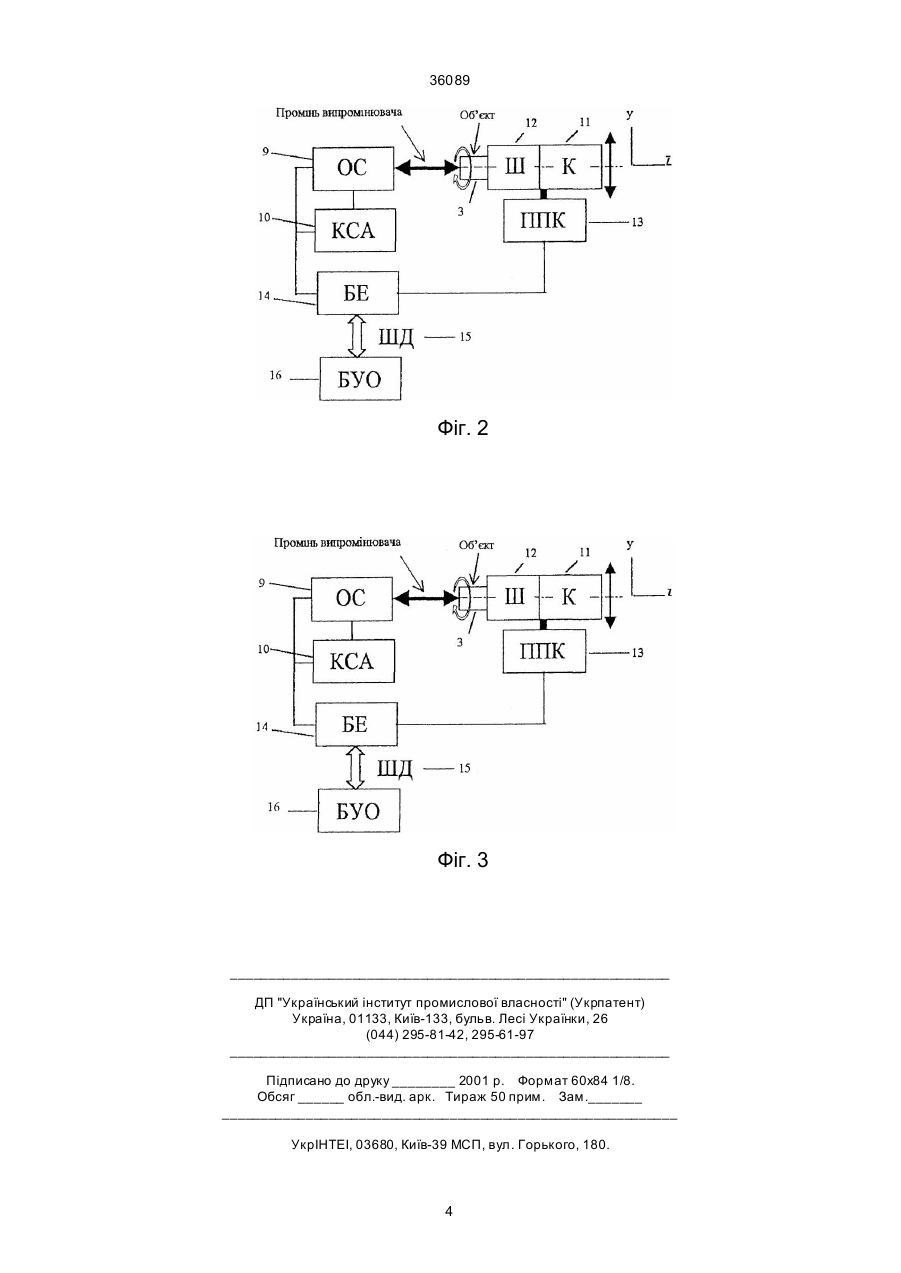
1. Спосіб отримання плоских, тримірних і стереоскопічних зображень поверхні об'єктів, що включає візуалізацію поверхні об'єктів у відбитому світлі і його дослідження, відмінний тим, що для освітлення об'єкта по нормалі до поверхні використовують сфокусований лазерний промінь; для фіксації відбитого світла застосовують фотоприймачі, орієнтовані під різними кутами; для вимірювання глибини просторової неоднорідності використовують відстежуючу фокусуючу систему, переміщуючи лазерний промінь чи об'єкт відносно 36089 до пристрою, що заявляється, є мікроскоп порівняння МС-1 [1], в якому для отримання зображення використовуються: двоканальна оптична система з двома об'єктивами, з бічним підсвічуванням зразків немонохроматичним світлом; система кріплення і обертання зразків перед об'єктивом, а також пристосування для фотографування зображення. Задача винаходу – отримання растрових зображень розгорток тримірних об'єктів без геометричних спотворень, підвищення точності метричних вимірювань по трьох координатах, підвищення якості і відтворення зображень тримірних об'єктів. Для досягнення поставленої мети запропоновані спосіб і автоматизований пристрій. Спосіб отримання плоских, тримірних і стереоскопічних зображень поверхні об'єктів, що включає візуалізацію поверхні об'єктів у відбитому світлі і його дослідження, відмінний тим, що для освітлення об'єкта по нормалі до поверхні використовують сфокусований лазерний промінь; для фіксації відбитого світла застосовують фотоприймачі, орієнтовані під різними кутами; для вимірювання глибини просторової неоднорідності використовують відстежуючу фокусуючу систему, переміщуючи лазерний промінь чи об'єкт відносно один одного з отриманням зображення поверхні. Пристрій, що містить оптичну систему отримання зображення, відмінний тим, що для освітлення поверхні об'єкта використовують лазерне джерело сфокусованого випромінювання, в якості приймальної оптичної системи застосовують три фотоприймачі, орієнтованих під трьома різними кутами; для вимірювання глибини просторової неоднорідності використовують відстежуючу систему автофокусування; для установки і кріплення об'єкта застосовують багатопозиційну каретку з шпинделем, що обертається, встановлену на пристрої відносного переміщення каретки і оптичної системи; для автоматизації роботи пристрою використовують блок електроніки, шину обміну даними, комп'ютерно-програмний блок управління і обробки, де формуєтся зображення поверхні об'єкта за заданим алгоритмом. Вони дозволяють: -отримувати растрові зображення розгорток тримірних об'єктів в монохроматичному світлі лазерного випромінювання без геометричних і хроматичних спотворень з різних ракурсів огляду, з високим просторовим розділенням по трьох координатах, високим відтворенням результатів і мінімальними інформаційними втратами; – візуалізувати повне зображення відсканованої поверхні; – провести метричні і порівняльні дослідження декількох зразків з високою точністю; – провести комп'ютерний синтез монохроматичних і стереоскопічних зображень. На фіг. 1 приведена схема оптичної системи (ОС) для реалізації способу, де: 1– лазерний випромінювач;. 2 – об'єктив; 3 – об'єкт; 4 – фотоприймач під кутом 0°, 5-фотоприймач під кутом +а, 6-фотоприймач під кутом -а, 7-калібрована система фокусування, 8-блок обробки. На фіг. 2 приведена блок-схема пристрою для отримання розгортки об'єктів з довільною симетрією, де: 9-оптична система, 10-калібрована система автофокусування, 11-каретка, 12шпиндель, 13-пристрій переміщення каретки, 14блок електроніки, 15-шина обміну даними, 16-блок управління та обробки. На фіг. 3 приведена блок-схема пристрою для отриманім розгортай об'єктів обертання, де: 9оптична система, 10-калібрована система автофокусування, 11-каретка, 12-шпиндель, 13-пристрій переміщення каретки, 14-блок електроніки, 15шина обміну даними, 16-блок управління та обробки. Спосіб здійснюється таким чином. Промінь лазерного випромінювача 1 за допомогою об'єктиву 2 фокусується на поверхню об'єкта 3 під кутом нуль градусів по відношенню до нормалі. Світло, відбите від поверхні, поступає на три фотоприймача. Фотоприймач 4 фіксує світло, відбите від поверхні під кутом нуль градусів по відношенню до нормалі, в тілесному куті, що визначається апертурою об'єктиву 2 і відстанню між вихідною лінзою об'єктиву і поверхнею об'єкта 3. Фотоприймачі 5,6 фіксують випромінювання, відбите під оптимальними кутами +а і -а, в тілесних кута х, що визначаються апертурою фотоприймачів і відстанню між входами фотоприймачів і поверхнею об'єкта 3. Калібрована система фокусування 7 відстежує положення сфокусованої точки променя на поверхні об'єкта 3 по осі z. Це положення, разом з амплітудами сигналів з фотоприймачів, поступає в пам'ять блоку обробки зображення 8. Таким чином, кожній точці поверхні об'єкта 3 в пам'яті блоку обробки відповідає чотирьох-параметрична точка – з трьома амплітудами, отриманими під різними кутами і позицією фокуса лазерного променя. Переміщуючи промінь відносно поверхні (або поверхню відносно променя) в площині ху із заданим кроком, і фокусуючи при необхідності промінь на поверхні, отримуємо в пам'яті блоку обробки три електронні копії зображення поверхні зразка разом з координатою z. Цієї інформації виявляється досить, щоб після обробки цих зображень по заданому алгоритму побудува ти плоске, тримірне або стереоскопічне (в доповнюючих кольорах) зображення поверхні об'єкта 3 і вивести його на екран монітора. Оскільки освітлення об'єкта 3 проводиться по нормалі до поверхні, і відбите світло фіксується під декількома кутами, то інформаційні втрати в зображені зводяться до мінімуму. Якщо отримувати електронні копії при фіксованих кутах фотоприймачів, то буде досягнуто практично 100процентне відтворення результатів. Просторова розподільна здатність методу в площині ху визначається розміром сфокусованого променя, а по координаті z – довжиною лазерного променя. На фіг. 2 і фіг. З зображена блок-схема пристрою для отримання розгорток об'єктів різної форми, відмінного тим, що в якості оптичної системи 9 використовують: лазерний випромінювач 1; фокусуючий об'єктив 2 і калібровану систему фокусування 7, що фокусує промінь на поверхню об'єкта 3 по нормалі; три фотоприймачі 4,5,6, що фіксують відбите світло під різними кутами (див. фіг.1). Лазерний випромінювач 1, фокусуючий об'єктив 2, калібрована система фокусування 7 та фотоприймачі 4,5,6 механічно зв'язані. • Невід'ємними частинами пристрою також являються калібрована система автофокусування 2 36089 10, багатопозиційна каретка 11 для кріплення об'єкта з шпинделем 12, що обертається (каретка 11 механічно встановлюється на прецизійному пристрої відносного переміщення 13 каретки 11 і оптичної системи 9 ); блок електроніки 14 для формування сигналів синхронізації і обміну інформацією між пристроєм і комп'ютерним блоком управління; шина обміну даними 15; комп'ютерний блок управління і обробки 16, який, в свою чергу, включає монітор для динамічного виведення зображень і стану пристрою, принтер для отримання твердих копій зображень розгорток; програмне забезпечення, що керує роботою пристрою по заданому алгоритму. Блоки 9-14 пристрою розміщуються в одному конструктиві та мають між-блочні електричні та механічні зв'язки. Синхронізація роботи елементів пристрою здійснюється в блоці електроніки 14. Побудова та вивід зображень здійснюється у блоці БУО 16. Пристрій працює в двох режимах: •для об'єктів з довільною симетрією; •для об'єктів обертання (циліндрів, конусів і т.д.). Режими відрізняються положенням каретки 11 на пристрої переміщення каретки 13 відносно променя випромінювача оптичної системи, алгоритмами обробки. Для отримання абсолютних значень координат з відносних позицій КСА 10 і ППК 13 пристрій заздалегідь юстирується в напівавтоматичному режимі по заданій програмі. У першому режимі (фіг. 2) пристрій працює таким чином. Об'єкт 3 закріплюють на шпинделі 12 каретки 11 і включають обертання шпинделя 12. Керування обертанням шпинделя 12 здійснюється з БУО 16. Також по команді з БУО 16, ППК 13 виставляє положення осі обертання шпинделя відносно променя на задану відстань. КСА 10 проводить фокусування променя випромінювача на поверхню об'єкта 3. При поворотах шпинделя на заданий кут в межах 0-360° відносно умовного початку розгортки ОС 9 проводить послідовне фіксування оптичного образу точок поверхні об'єкта З у відбитому світлі і положення точок фокуса в пам'яті пристрою, формуючи зображення кільцевої дільниці поверхні. Після повороту шпинделя на 360° позиція ППК 13 змінюється на задану відстань по осі у і процес повторюється. Таким чином, в пам'яті комп'ютерного блоку управління і відображення 16 формується зображення поверхні об'єкта в полярних координатах. Радіус кожної точки відносно осі обертання шпинделя задається позицією ППК 13, кут повороту – положенням шпинделя відносно умовного початку розгортки, а положення КСА 10 вимірює глибину профілю (координата z). Огримане зображення після обробки по заданому алгоритму може бути відображене як в полярних, так і в декартових координатах, а також збережено в базі даних. У другому режимі каретка встановлюється на ППК 13 в положення, показане на фіг. 3. У цьому режимі відбувається сканування бічної поверхні тіла обертання, по алгоритму, описаному вище. При цьому позиція ППК 13 задає значення твірної, а позиція КСА 10 – радіус відносно осі обертання шпинделя. Побудова і виведення зображень необхідної форми здійснюється по заданій програмі. Порівняння декількох зображень може проводитися як візуально (на екрані монітора або на принтерних копіях), так і автоматично в пам'яті комп'ютера. Спосіб і пристрій використані для створення автоматизованої балістичної експертної системи і апробовані при отриманні зображень балістичних об'єктів (куль і гільз, в тому числі сильно деформованих) і проведенні їх порівняльної експертизи в криміналістичній лабораторії ГУМВД України м.Києва. Література: 1. Микроскоп сравнения МС-1. Паспорт. АГЕ. 201370.005ПС, 1994 г. Фіг. 1 3 36089 Фіг. 2 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. 4 36089 (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for obtaining flat, three-dimensional and stereoscopic images of surfaces of objects and device for its implementation
Автори англійськоюMakarchuk Volodymyr Mykolaiovych, Borodin Mykola Oleksiiovych
Назва патенту російськоюСпособ получения плоских, трехмерных и стереоскопических изображений поверхности объектов и устройство для его осуществления
Автори російськоюМакарчук Владимир Николаевич, Бородин Николай Алексеевич
МПК / Мітки
МПК: G01B 11/00
Мітки: об'єктів, пристрій, отримання, стереоскопічних, поверхні, плоских, тримірних, здійснення, зображень, спосіб
Код посилання
<a href="https://ua.patents.su/5-36089-sposib-otrimannya-ploskikh-trimirnikh-i-stereoskopichnikh-zobrazhen-poverkhni-obehktiv-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб отримання плоских, тримірних і стереоскопічних зображень поверхні об’єктів та пристрій для його здійснення</a>
Спосіб іонно-плазмового зміцнювання поверхні металів та пристрій для його здійснення
Номер патенту: 20151
Опубліковано: 25.12.1997
Автор: Пастух Ігор Маркович
МПК: C23C 10/06
Мітки: іонно-плазмового, пристрій, поверхні, здійснення, металів, спосіб, зміцнювання
Формула / Реферат:
1. Способ ионно-плазменного упрочнения поверхности металлов в газовой среде при пониженном давлении и наличии электрического поля между корпусом камеры, выполняющим роль анода, или специальным анодом и обрабатываемым изделием, служащим катодом, отличающийся тем, что процесс ведется в газовой среде, составленной из исходных газообразных компонентов, количество и процентное содержание которых изменяется в зависимости от материала упрочняемых...
Спосіб реєстрації температури поверхні прокату та пристрій для його здійснення
Номер патенту: 939
Опубліковано: 15.12.1993
Автори: Бельский Олег Іванович, Брежнєв Леонід Іванович
Мітки: пристрій, прокату, температури, поверхні, спосіб, реєстрації, здійснення
Формула / Реферат:
1. Способ регистрации температуры поверхности проката, заключающийся в измерении и запоминании максимального значения прерываемого сигнала температуры излучения и регистрации температуры, отличающийся тем, что, с целью улучшения качества контроля нагрева металла для станов, работающих с одного подогрева в едином потоке металла с блюмингом, осуществляют идентификацию сигнала температуры поверхности конца прокатки посредством контроля...
Спосіб отримання відбитка пальця та пристрій для його здійснення
Номер патенту: 26419
Опубліковано: 30.08.1999
Автор: Кривутенко Анатолій Іванович
МПК: G06K 9/62, A61B 5/117, G06K 9/00
Мітки: пристрій, отримання, здійснення, відбитка, пальця, спосіб
Формула / Реферат:
1. Спосіб отримання відбитка пальця, який включає операції послідовного формування на прозорій пластині з діелектричного матеріалу суцільного шару активної речовини, прикладання до нього пальця та подачу електричної напруги, який відрізняється тим, що вводять додатковий електрод, який відокремлений від шару активної речовини і прозорого, електроду діелектриком, причому палець контактує з додатковим електродом і суцільним шаром активної...
Спосіб покриття внутрішньої поверхні трубопроводу та пристрій для його здійснення
Номер патенту: 34173
Опубліковано: 15.02.2001
Автори: Зайцев Леонід Павлович, Гарник Володимир Кирилович
МПК: F16L 55/18
Мітки: поверхні, внутрішньої, пристрій, покриття, здійснення, спосіб, трубопроводу
Текст:
...для пропускання крізь нього рукава з пригальмовуванням, а з другої патрубок. Це дозволяє отримати якісне покриття безпосередньо з кінця трубопроводу. Камера і заглушка мають зіркоподібні співвісно розташовані наскрізні прорізи, армовані ущільнювачами, які забезпечують пропускання рукава, складеного зіркоподібно в поперечному перерізі. Таким чином, таке положення рукава забезпечує можливість покриття клеєм всієї його зовнішньої поверхні з...
Спосіб отримання відбитка пальця та пристрій для його здійснення

Номер патенту: 27648
Опубліковано: 15.09.2000
Автор: Кривутенко Анатолій Іванович
МПК: G06K 9/00, A61B 5/117
Мітки: спосіб, відбитка, здійснення, пристрій, пальця, отримання
Текст:
...падають на фоточутливий елемент. У цьому елементі світлові сигнали перетворюються на електричні імпульси, які попадають у обчислювальну систему, де відбувається їх обробка та ідентифікація. Розглянутий спосіб отримання відбитка пальця має такі недоліки; низьку точність отримання відбитка, так як падіння світла відбуваєть ся' під певним кутом, а папілярні лінії на пальці розміщені в круговому порядку, тому відбиті папілярні лінії не...
Попередній патент: Тест-система для виявлення антитіл проти вірусу гепатиту с (іфа – hcv -ііі )
Наступний патент: Спосіб діагностики овуляції при гіпофізарно-гіпоталамічно-яєчникових дисфункціях у жінок з неплідністю
Випадковий патент: Вітроелектричний агрегат