Пристрій обробки радіолокаційної інформації
Номер патенту: 39461
Опубліковано: 15.06.2001
Автори: Немчин Олександр Федорович, Мокеєв Юрій Геннадійович


Формула / Реферат
Пристрій обробки радіолокаційної інформації, який містить гребінку з q доплеровських фільтрових каналів з об'єднаними входами, кожен з каналів містить доплеровський фільтр, вхід якого є входом доплерівського фільтрового каналу, q-входову схему АБО та бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, який ваідрізняється тим, що кожний доплеровський канал містить блок визначення рівня шуму та лінію затримки, об'єднані входи яких підключені до виходу доплеровського фільтру, порогову схему, перший вхід якої з'єднаний з виходом блоку визначення рівня шуму, а другий вхід з'єднаний з виходом лінії затримки, додаткову вентильну схему, перший вхід якої підключений до виходу вентильної схеми, другий вхід з'єднаний з виходом порогової схеми, а вихід є виходом доплеровського каналу.
Текст
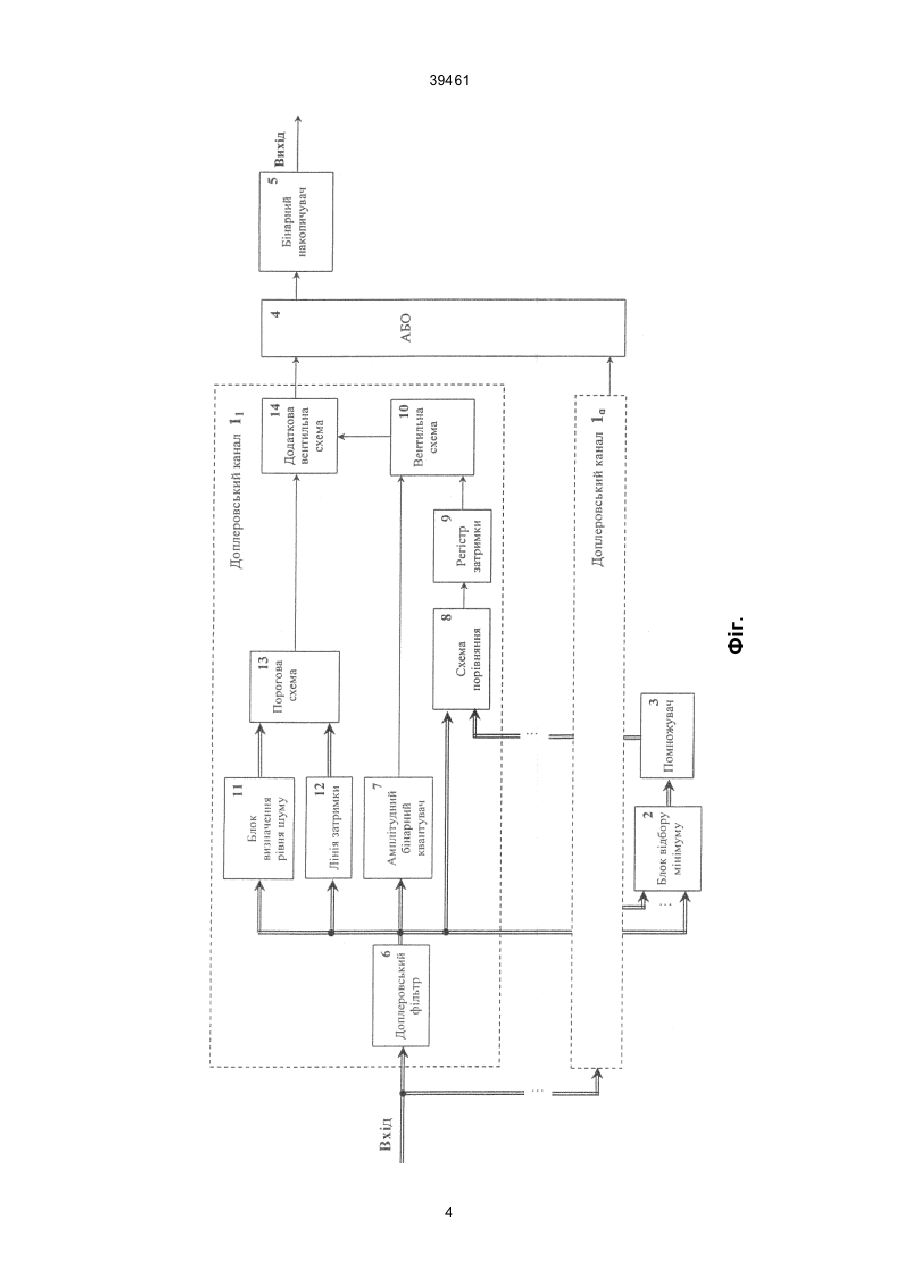
Пристрій обробки радіолокаційної інформації, який містить гребінку з q доплерівських фільтрових каналів з об'єднаними входами, кожен з каналів містить доплерівський фільтр, вхід якого є входом 39461 ня шуму та лінію затримки, об'єднані входи яких підключені до виходу доплерівського фільтру, порогову схему, перший вхід якої з'єднаний з виходом блоку визначення рівня шуму, а другий вхід з'єднаний з виходом лінії затримки, додаткову вентильну схему, перший вхід якої підключений до виходу вентильної схеми, другий вхід з'єднаний з виходом порогової схеми, а вихід є виходом доплерівського каналу. Суть винаходу пояснюється блок-схемою запропонованого пристрою, наданою на кресленні (фіг.). Пристрій обробки радіолокаційних сигналів, що пропонується, складається з гребінки q доплерівських каналів 1 з об'єднаними входами, що є входом пристрою, блоку відбору мінімуму 2 з q входами, помножувача 3, вхід якого з'єднаний з виходом блоку відбору мінімуму 2, q-входової схеми АБО 4, входи якої підключені до виходів доплерівських каналів 1, бінарного накопичувача 5, вхід якого з'єднаний з виходом q-входової схеми АБО 4, а вхід є ви ходом пристрою, кожен доплерівський канал 1 містить доплерівський фільтр 6, вхід якого є входом доплерівського каналу 1, амплітудний бінарний квантувач 7, послідовно з'єднані схему порівняння 8 і регістр затримки 9, вихід доплерівського фільтра 6 з'єднаний зі входом амплітудного бінарного квантувача 7, з першим входом схеми порівняння 8 і відповідним входом блоку відбору мінімуму 2, вентильну схему 10, перший вхід якої підключений до виходу амплітудного бінарного квантувача 7, а другий вхід з'єднаний з виходом регістру затримки 9, другі входи схем порівняння 8 всіх доплерівських каналів 1 об’єднані між собою і підключені до виходу помножувача 3, в кожен доплерівський канал 1 введені блок визначення рівня шуму 11 та лінія затримки 12, об'єднані входи яких підключені до виходу доплерівського фільтру 6, порогова схема 13, перший вхід якої з'єднаний з виходом блоку визначення рівня шуму 11, а др угий вхід з'єднаний з виходом лінії затримки 12, додаткова вентильна схема 14, перший вхід якої підключений до виходу вентильної схеми 10, другий вхід з'єднаний з виходом порогової схеми 13, а вихід є ви ходом доплерівського каналу 1. Введення до складу пристрою в кожному доплерівському каналі 1 блоку визначення рівня шуму 11 та лінії затримки 12, порогової схеми 13, додаткової вентильної схеми 14, відповідно зв'язаних поміж собою та з q-входовою схемою АБО 4, дає можливість досягти нового, раніше невідомого технічного результату, а саме: визначивши середній рівень шуму, виявити наявність неперервних шумових завад і заблокувати видачу сигналу виявлення на вихід доплерівського каналу 1, що дає всі підстави віднести ці ознаки загального обсягу патентних домагань до розряду суттєвих. Пристрій, що пропонується, працює наступним чином. На об'єднані входи q доплерівських каналів 1 надходить сигнал з виходу приймача імпульснодоплерівської РЛС, в якій здійснюється вобуляція частоти слідування зондуючих імпульсів. Зміна частоти слідування зондуючих імпульсів відбувається через кожні q періодів зондування. В доплерівських фільтрах 6 кожного доплерівського каналу 1 протягом q періодів зондування здійснюється розфільтрування вхідного сигналу в кожному дискреті дальності. В когерентній РЛС фаза сигналу, відбитого від цілі, має постійний міжперіодний набіг. Після розфільтрування сигнал від цілі матиме максимальний відгук в одному з доплерівських каналів 1. Рівень сигналу в інших доплерівських каналах 1 для даного елемента дальності буде визначатись ступенем перекриття амплітудо-частотних характеристик (АЧХ) доплерівських фільтрів та шумами. Під впливом дії некогерентної імпульсної завади міжперіодний набіг фази змінюється скачкоподібно і, крім того, кількість імпульсних завад, що приймаються в даному елементі дальності, не співпадає з числом когерентно накопичених імпульсів q. Тому сигнал імпульсної завади буде мати приблизно однакову амплітуду на ви ходах доплерівських фільтрів 6 кожного доплерівського каналу 1. Відмінності в розподіленні відгуків по доплерівських каналах 1 під час дії сигналів від цілей та імпульсних завад використовується в пристрої для подавлення імпульсних завад. Інформація з виходів доплерівських фільтрів 6 кожного доплерівського каналу 1 надходить на відповідні входи блоку відбору мінімуму 2, в якому визначається рівень мінімального вихідного сигналу з усіx доплерівських фільтрів 6, помноженийна заданий коефіцієнт k в помножувачеві 3. Значення коефіцієнту k визначається ступенем нерівномірності розподілу відгуків доплерівських фільтрів 6, викликаних наявністю шумів. Нормована величина з виходу помножувача 3 надходить на об'єднані входи схем порівняння 8 усі х доплерівських каналів 1, на перші входи яких надходить сигнал з виходів відповідних доплерівських фільтрів 6. У випадку, коли останні перевищують нормовану величину, на виході відповідної схеми порівняння 8 формується сигнал логічної одиниці, який затримується в регістрі затримки 9 на час обробки сигналів в амплітудному бінарному квантувачеві 7, на виходах яких формується бінарна інформація. У випадку, коли сигнал на виході доплерівського фільтру 6 в даному елементі дальності одночасно перевищить поріг амплітудного бінарного квантувача 7 і нормовану величину з виходу помножувача 3, на ви ході вентильної схеми 10 формується сигнал логічної одиниці. Тому як сигнал імпульсної завади не перевищує нормовану величину, то у відповідному елементі дальності, на виході схеми порівняння 8 сформується сигнал логічного нуля, який заборонить прохід можливого сигналу логічної одиниці з виходу амплітудного бінарного квантувача 7 через вентильну схему 10. Таким чином, відбувається подавлення імпульсних завад. При наявності неперервних шумових завад спрацьовує частина пристрою, що складається з блоку визначення рівня шуму 11, лінії затримки 12 та порогової схеми 13. Оскільки нормована оцінка шумових складових сигналів на вихода х доплерівських фільтрів 6 є величина стала, яка не залежить від часу проведення оцінки, то в пристрій введена тільки одна лінія затримки 12, з допомогою якої вирівнюються затримки в обробці сигналів в різних частинах доплерівських каналів 1 таким чином, щоб результати обробки для різних завадових сигналів співпали у часі. Таким чином, якщо 2 39461 сигнал на виході лінії затримки 12 не перевищує в задане число разів сигнал на виході блоку визначення рівня шуму 11, на виході порогової схеми 13 формується сигнал логічного нуля, що є ознакою наявності неперервних шумових завад. При цьому блокується додаткова вентильна схема 14, формуючи на її виході, що є ви ходом доплерівського каналу 1, сигнал логічного нуля. Сигнали з виходів доплерівських каналів 1 надходять на входи логічної q-входової схеми АБО 4, де відбувається їх логічне складання. В бінарному накопичувачеві 5, що оброблює бінарні сигнали з виходу q-входової схеми АБО 4, відбува ється накопичення цих сигналів протягом часу, коли оброблюються сигнали з різними частотами повторення зондуючих імпульсів. В залежності від результату накопичення бінарної інформації, на виході бінарного накопичувача 5 формується сигнал наявності чи відсутності цілі. Таким чином, завдяки блокові визначення рівня шуму, лінії затримки, пороговій схемі та додатковій вентильній схемі при наявності неперервних шумових завад відбувається відсікання помилково виявлених цілей, що знижує вірогідність помилкових тривог. 3 Фіг. 39461 4 39461 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Автори англійськоюNemchyn Oleksandr Fedorovych, Mokeiev Yurii Hennadiiovych
Автори російськоюНемчин Александр Федорович, Мокеев Юрий Геннадьевич
МПК / Мітки
МПК: G01S 13/56, G01S 13/00
Мітки: обробки, пристрій, радіолокаційної, інформації
Код посилання
<a href="https://ua.patents.su/5-39461-pristrijj-obrobki-radiolokacijjno-informaci.html" target="_blank" rel="follow" title="База патентів України">Пристрій обробки радіолокаційної інформації</a>
Пристрій автоматичного виявлення сигналів інформації
Номер патенту: 37870
Опубліковано: 15.05.2001
Автори: Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович, Мокеєв Юрій Геннадійович, Лаврентьєв Володимир Миколайович, Немчин Олександр Федорович, Падалко Віктор Григорович, Козловський Петро Леонідович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ
МПК: G01S 7/36
Мітки: автоматичного, виявлення, інформації, сигналів, пристрій
Формула / Реферат:
Пристрій автоматичного виявлення сигналів, що містить q доплерівських фільтруючих каналів з об'єднаними входами, що є входом пристрою, q-входову схему АБО, входи якої з'єднані з виходами доплерівських фільтруючих каналів, бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, а вихід є виходом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтруючого каналу, багатовідвідну...
Пристрій виявлення сигналів інформації
Номер патенту: 37871
Опубліковано: 15.05.2001
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мирошниченко Михайло Іванович, Траілін Вячеслав Федорович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович, Каспирович Олександр Геннадійович, Падалко Віктор Григорович, Лаврентьєв Володимир Миколайович
МПК: G01S 7/02
Мітки: сигналів, пристрій, виявлення, інформації
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Пристрій обробки інформації
Номер патенту: 38733
Опубліковано: 15.05.2001
Автор: Чумаченко Ігор Володимирович
МПК: G06F 7/48, G06F 17/11
Мітки: пристрій, інформації, обробки
Текст:
...виходи четвертого операційного блоку 6 з'єднані з другою групою входів третього мультиплексора 12, виходи якого з'єднані з першою групою входів др угого м ультиплексора 11, виходи другого мультиплексора 11 з'єднані з шиною результату 2. Всі елементи, що входять до складу пристрою є відомими елементами автоматики і обчислювальної техніки і можуть бути виконані за будь-якою відомою схемою. Працює пристрій обробки інформації таким чином....
Перетворювач аналогового сигналу радіолокаційної станції в цифровий
Номер патенту: 672
Опубліковано: 16.10.2000
Автори: Садовий Ігор Леонідович, Кравченко Олександр Іванович, Пілюгін Сергій Вікторович
МПК: H05K 1/02, G06F 3/05, H03M 1/12, G06F 5/06, G06F 1/16, G06F 1/04
Мітки: радіолокаційної, перетворювач, аналогового, станції, цифровий, сигналу
Формула / Реферат:
1. Перетворювач аналогового сигналу радіолокаційної станції в цифровий, який включає процесорний блок та вузол нормалізації сигналу, який відрізняється тим, що вузол нормалізації сигналів від двох радіолокаційних станцій одного поста виконано в вигляді п'яти друкованих плат таким чином, що перша друкована плата призначена для нормалізації сигналів кута повороту антени радіолокаційної станції і має три входи та один вихід, друга друкована...
Пристрій криптографічного захисту інформації
Номер патенту: 37997
Опубліковано: 15.05.2001
Автори: Горбенко Іван Дмитрович, Свинарьов Андрій Володимирович, Торба Олексій Олександрович, Терещенко Петро Іванович
МПК: H04L 9/00
Мітки: захисту, інформації, криптографічного, пристрій
Формула / Реферат:
Пристрій криптографічного захисту інформації, який містить екран захисту по електромагнітному полю і механічно взаємозв'язаний з ним електричним контактом комутатор напруги живлення шифратора, шифратор, блок введення та формування ключів, інтерфейс, який відрізняється тим, що він має мінімум два канали, в кожний канал додатково введені дешифратор, перші і другі схеми порівняння, перші і другі цифрові елементи затримки, перші і другі...
Попередній патент: Радіально-кувальна машина
Наступний патент: Композиція просочувальна для поверхневого вогне- та біозахисту деревини
Випадковий патент: Кормороздавач