Система для характеризації радіоактивних об’єктів, переважно упаковок радіоактивних відходів
Номер патенту: 43136
Опубліковано: 10.08.2009
Автори: Чігір Вадім Вадімовіч, Друзягін Алєксєй Владіміровіч, Стєпанов Алєксєй Борісовіч, Мєлєта Дмітрій Євгєньєвіч
Формула / Реферат
1. Система для характеризації радіоактивних об'єктів, переважно упаковок радіоактивних відходів, які містять гамма-випромінюючі радіонукліди, яка має вимірювальний модуль, модуль накопичення й обробки інформації, пов'язаний з вимірювальним модулем, і модуль автоматичного керування, пов'язаний з вимірювальним модулем і модулем накопичення й обробки інформації, в якій передбачено засіб для транспортування радіоактивного об'єкта, зокрема рейковий візок, оснащений автоматичною системою виміру ваги об'єкта, системою центрування об'єкта на платформі засобу для транспортування і системою дистанційного керування, при цьому вимірювальний модуль, оснащений детекторами гамма-випромінювання, включає платформу, пристосовану до горизонтального переміщення й установлену, зокрема, на рамі з колісним приводом, на висоті, яка є достатньою для переміщення засобу для транспортування з радіоактивним об'єктом під платформою вимірювального модуля, при цьому платформа вимірювального модуля оснащена щонайменше одним детектором, який забезпечує реєстрацію гамма-випромінювання по напрямку від верхньої поверхні радіоактивного об'єкта, а до нижньої частини платформи прикріплені пристрої для розміщення детекторів гамма-випромінювання, які забезпечують реєстрацію гамма-випромінювання по напрямку від бічної поверхні радіоактивного об'єкта.
2. Система за п. 1, у якій пристрої для розміщення детекторів гамма-випромінювання виконані з можливістю горизонтального переміщення по нижній поверхні платформи з наступною фіксацією пристроїв на відстані один від одного, достатній для розміщення радіоактивного об'єкта усередині простору між пристроями з детекторами.
3. Система за п. 1 або п. 2, у якій як детектор, який забезпечує реєстрацію гамма-випромінювання по напрямку від верхньої поверхні радіоактивного об'єкта, використаний напівпровідниковий детектор.
4. Система за п. 3, яка має пристрій охолодження напівпровідникового детектора, зокрема посудину Дьюара з рідким азотом.
5. Система за п. 4, у якій як детектори, що забезпечують реєстрацію гамма-випромінювання по напрямку від бічної поверхні радіоактивного об'єкта, використані сцинтиляційні детектори.
6. Система за п. 5, яка має систему повітряної завіси детекторів.
7. Система за п. 6, у якій реєстрація гамма-випромінювання по напрямку від бічної поверхні радіоактивного об'єкта забезпечується щонайменше шістьма сцинтиляційними детекторами, при цьому на кожному пристрої розміщений щонайменше один сцинтиляційний детектор.
8. Система за п. 1 або п. 2, у якій детектори, що забезпечують реєстрацію гамма-випромінювання по напрямку від бічної поверхні радіоактивного об'єкта, розміщені на пристроях з можливістю вертикального переміщення детекторів, зокрема, по напрямних пристроїв.
9. Система за п. 8, у якій як пристрої для розміщення сцинтиляційних детекторів використані вертикально орієнтовані етажерки.
10. Система за п. 1 або п. 2, у якій передбачений конвеєр, який забезпечує автоматизоване навантаження радіоактивного об'єкта на засіб для транспортування й автоматизоване розвантаження засобу для транспортування.
Текст
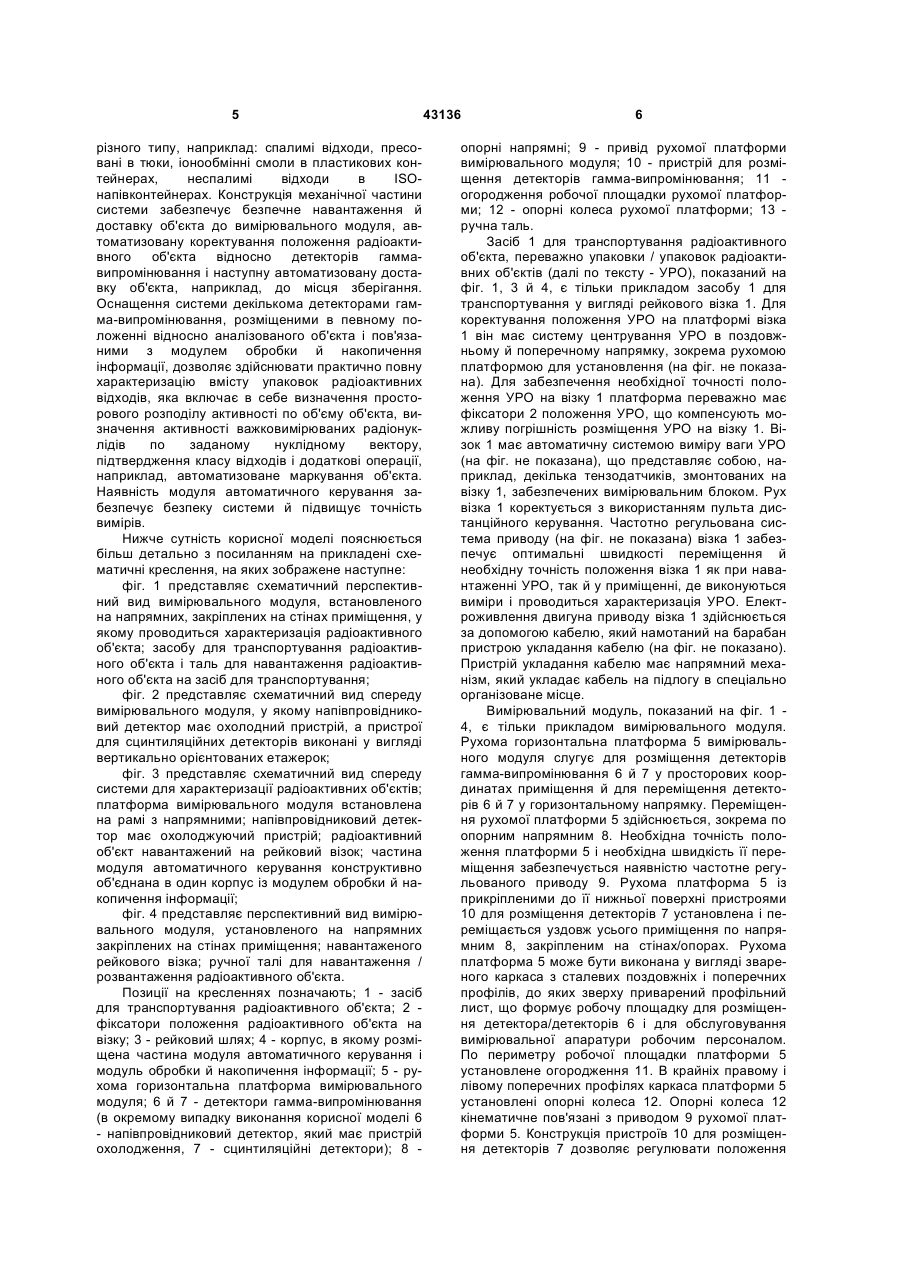
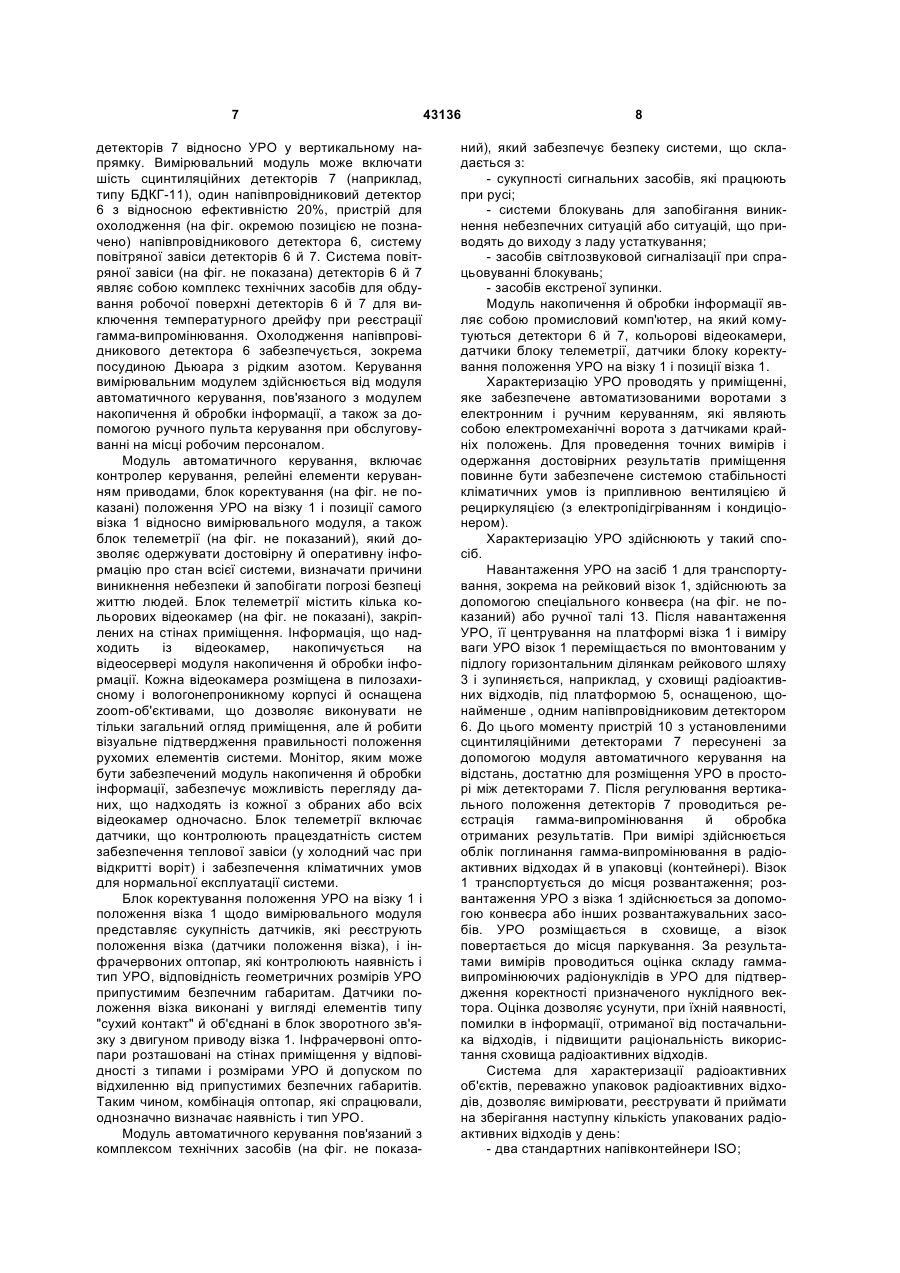
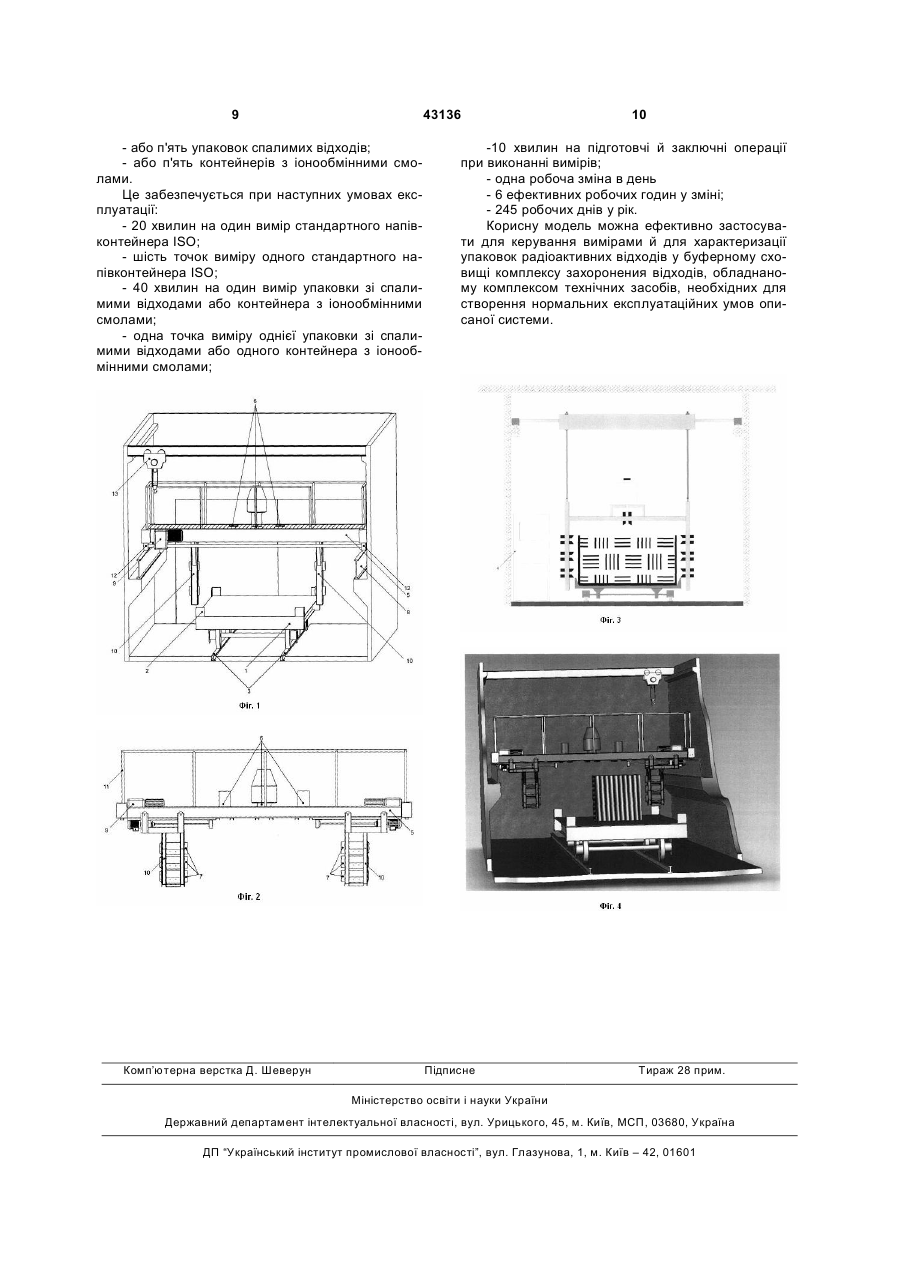
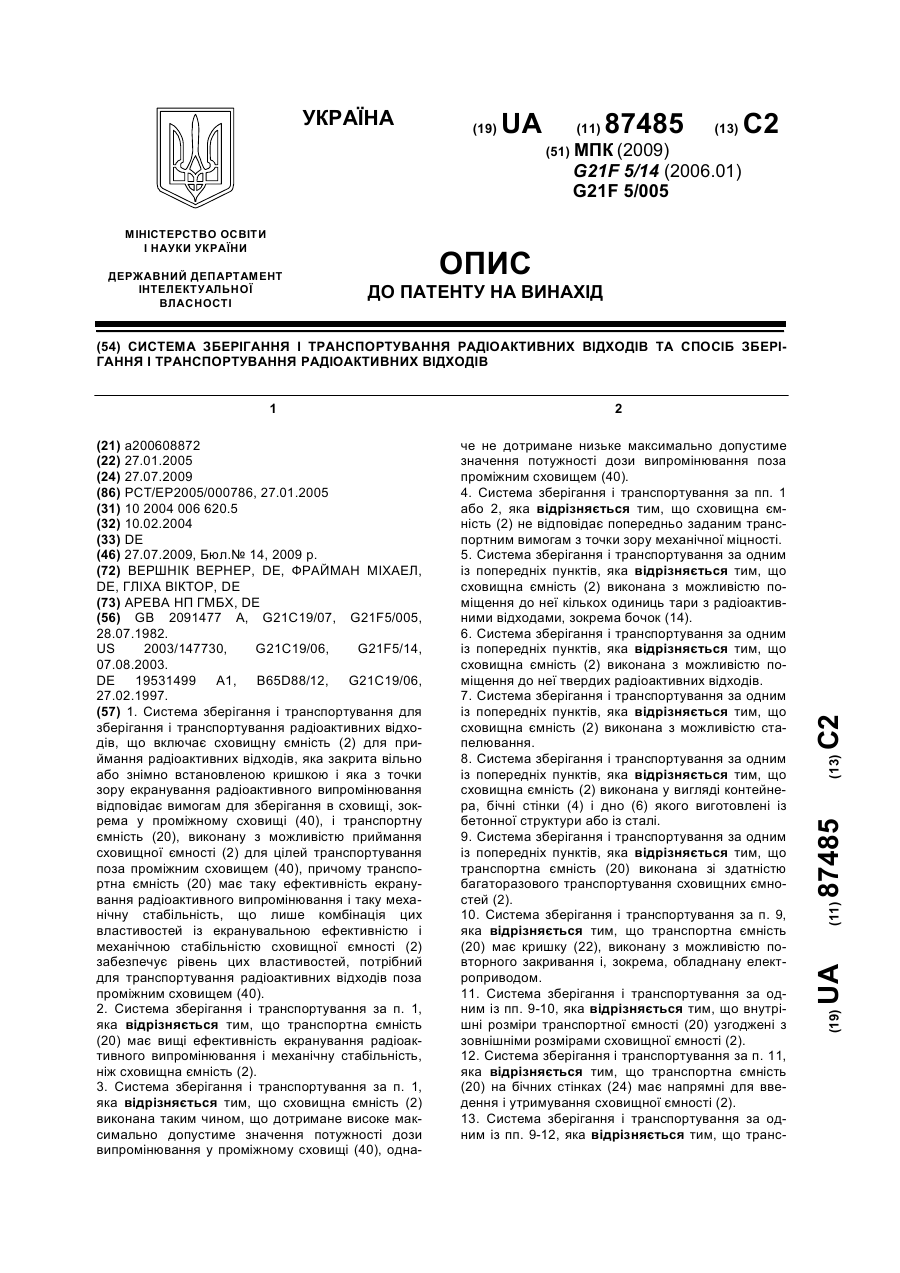
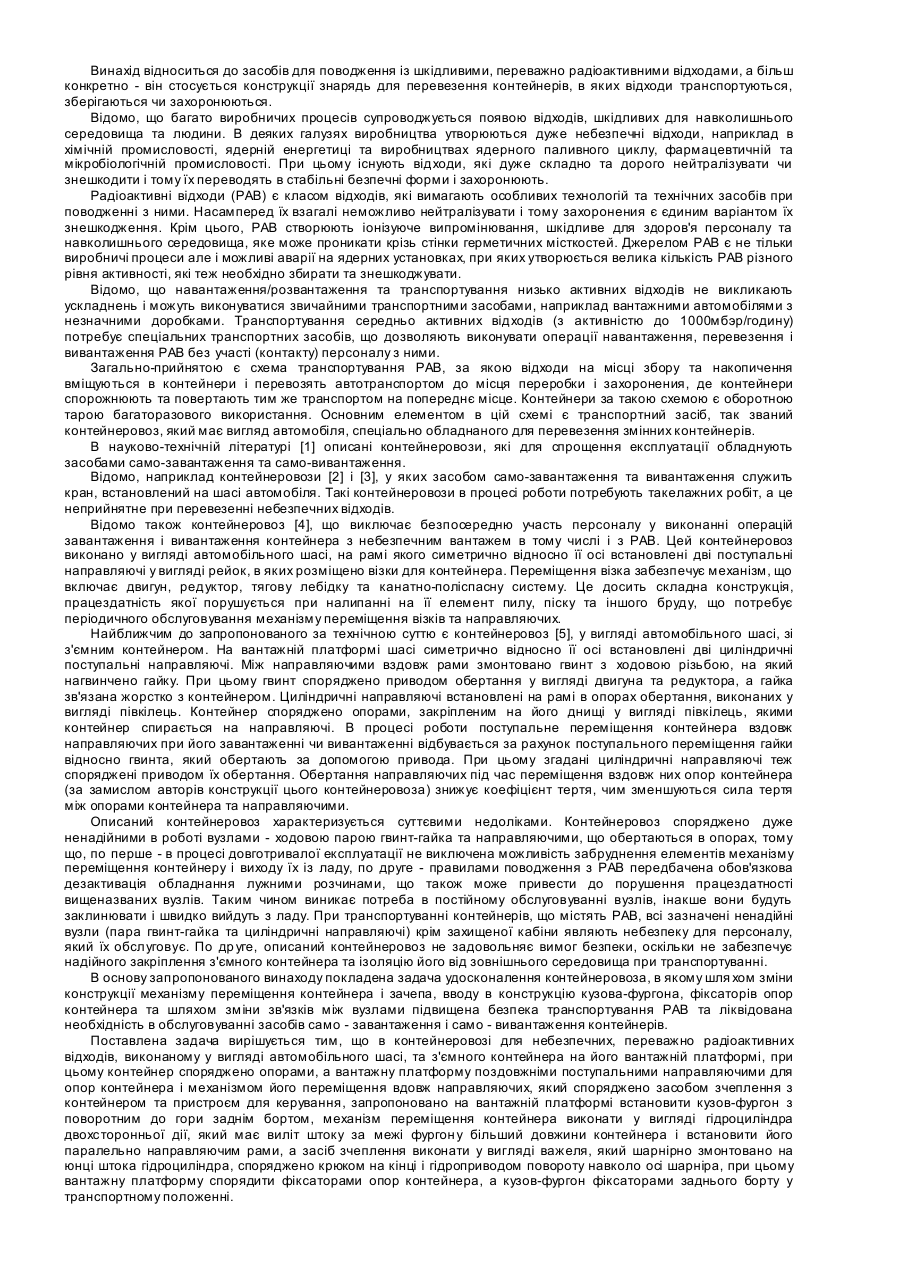
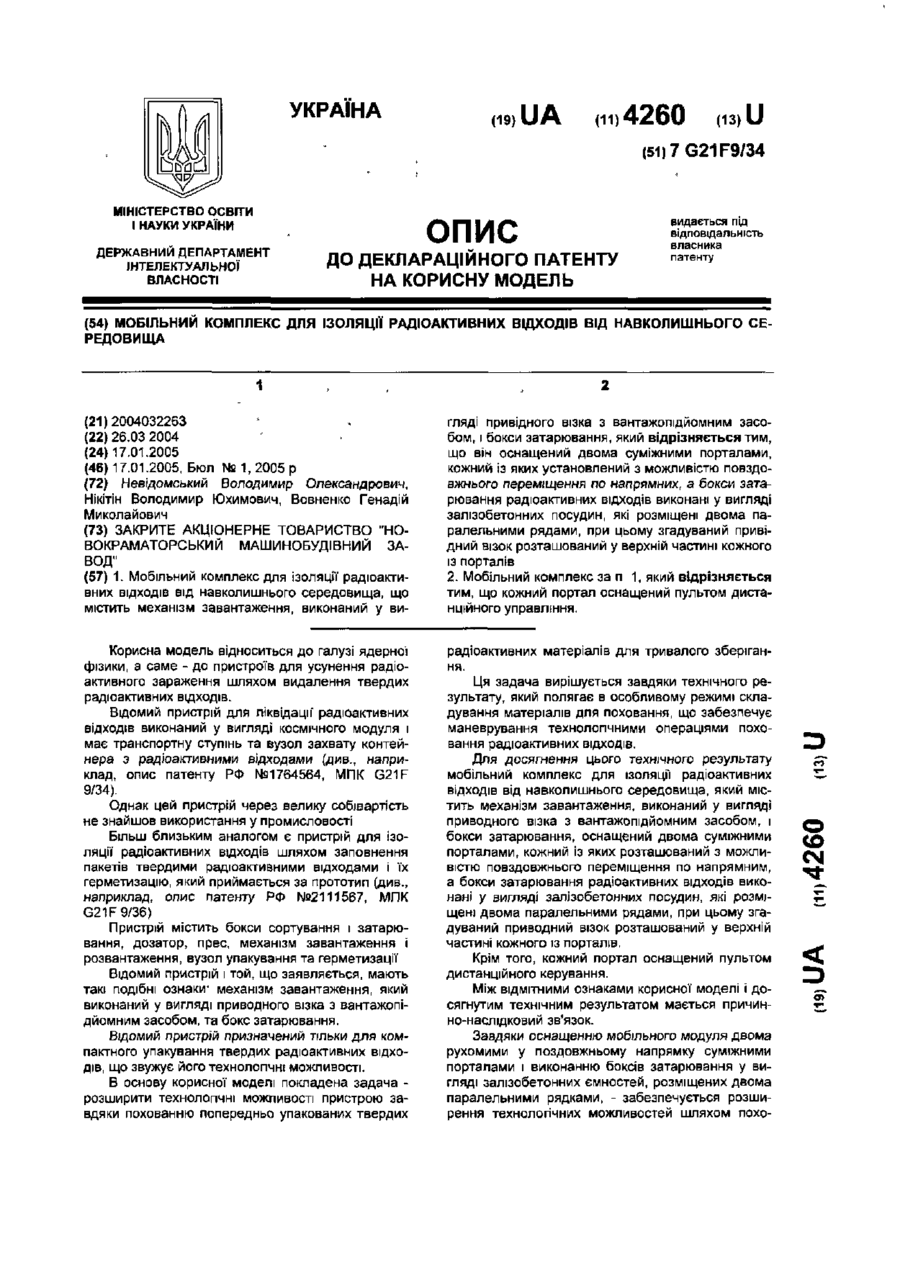
1. Система для характеризації радіоактивних об'єктів, переважно упаковок радіоактивних відходів, які містять гамма-випромінюючі радіонукліди, яка має вимірювальний модуль, модуль накопичення й обробки інформації, пов'язаний з вимірювальним модулем, і модуль автоматичного керування, пов'язаний з вимірювальним модулем і модулем накопичення й обробки інформації, в якій передбачено засіб для транспортування радіоактивного об'єкта, зокрема рейковий візок, оснащений автоматичною системою виміру ваги об'єкта, системою центрування об'єкта на платформі засобу для транспортування і системою дистанційного керування, при цьому вимірювальний модуль, оснащений детекторами гамма-випромінювання, включає платформу, пристосовану до горизонтального переміщення й установлену, зокрема, на рамі з колісним приводом, на висоті, яка є достатньою для переміщення засобу для транспортування з радіоактивним об'єктом під платформою вимірювального модуля, при цьому платформа вимірювального модуля оснащена щонайменше одним детектором, який забезпечує реєстрацію гамма-випромінювання по напрямку від верхньої поверхні радіоактивного об'єкта, а до нижньої частини платформи прикріплені пристрої для розміщення детекторів гамма-випромінювання, які забезпечують реєстрацію гамма-випромінювання по напрямку від бічної поверхні радіоактивного об'єкта. ПЕРЕВАЖНО 43136 1 ОБ'ЄКТІВ, (11) (54) СИСТЕМА ДЛЯ ХАРАКТЕРИЗАЦІЇ РАДІОАКТИВНИХ ВІДХОДІВ видається під відповідальність власника патенту UA ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС (19) МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ 3 Корисна модель стосується системи для аналізу радіоактивних об'єктів, переважно для виміру активності й визначення складу гаммавипромінюючих радіонуклідів в упаковках радіоактивних відходів. Система призначена для автоматизованого керування вимірами й характеризацією упаковок радіоактивних відходів і рішення завдань забезпечення ядерної безпеки. Відома сегментуюча система для виміру відходів, розроблена компанією Canberra Industries, призначена для виконання точного кількісного аналізу гамма-випромінюючих радіонуклідів, що є в продуктах поділу, продуктах активації й у трансуранових відходах (Публікація Canberra, Inc. C9842 "Сегментуюча система для виміру відходів Серія WM2200". Опублікована 10.2002 у США). Відома система, в якій передбачений контейнер, розділений на ряд вертикальних сегментів і детектор з особливо чистого германія для реєстрації гамма-випромінювань від радіонуклідів, що містяться в контейнері, змонтований у горизонтальному інтегральному кріостаті, має модульну конструкцію. Механічна частина системи може мати один або кілька модулів, а саме: модуль вертикального переміщення детектора, модуль поворотної платформи, модуль вертикального переміщення джерела для виміру ослаблення, додатковий конвеєр з поворотним пристроєм для автоматизації процесу навантаження контейнера й зняття контейнерів конвеєрів подачі і приймання. Система оснащена модулями керування й обробки сигналів, що надходять з детектора. Основним недоліком відомого технічного рішення є використання колімованого детектора, який забезпечує локальну реєстрацію гамма-випромінювання у вибраному сегменті радіоактивного об'єкта. Для одержання з використанням такої системи характеристик радіоактивного об'єкта в цілому необхідно послідовне проведення дискретних вимірів у декількох сегментах об'єкта, для чого потрібна багаторазова зміна положення об'єкта відносно детектора або детектора відносно об'єкта. Перед авторами стояло завдання усунути зазначені недоліки й розробити систему для характеризації упаковок радіоактивних відходів з можливістю здійснення одночасної реєстрації гаммавипромінювання в декількох точках радіоактивного об'єкта і on-line обробки отриманої інформації з автоматизованим управлінням системи. Для рішення поставленого завдання пропонується система для характеризації радіоактивних об'єктів, переважно упаковок радіоактивних об'єктів. Відповідно до корисної моделі пропонується система для характеризації радіоактивних об'єктів, переважно упаковок радіоактивних відходів, що містять гамма-випромінюючі радіонукліди, яка включає вимірювальний модуль, модуль накопичення і обробки інформації, пов'язаний з вимірювальним модулем, і модуль автоматичного керування, пов'язаний з вимірювальним модулем і модулем накопичення і обробки інформації, у якій передбачене засіб для транспортування радіоактивного об'єкта, зокрема рейковий візок, оснащений автоматичною системою виміру ваги об'єкта, 43136 4 системою центрування об'єкта на платформі засобу для транспортування і системою дистанційного керування, при цьому вимірювальний модуль, оснащений детекторами гамма-випромінювання, включає платформу, пристосовану до горизонтального переміщення і встановлену, зокрема на рамі з колісним приводом, на висоті, яка є достатньою для переміщення засобу для транспортування з радіоактивним об'єктом під платформою вимірювального модуля, при цьому платформа вимірювального модуля оснащена, щонайменше, одним детектором, який забезпечує реєстрацію гамма-випромінювання в напрямку від верхньої поверхні радіоактивного об'єкта, а до нижньої частини платформи прикріплені пристрої для розміщення детекторів гамма-випромінювання, які забезпечують реєстрацію гамма-випромінювання в напрямку від бічної поверхні радіоактивного об'єкта. Пристрої для розміщення детекторів гаммавипромінювання можуть бути виконані з можливістю горизонтального переміщення по нижній поверхні платформи з наступною фіксацією пристроїв на відстані один відносно одного, яка достатня для розміщення радіоактивного об'єкта усередині простору між пристроями з детекторами. В якості детектора, який забезпечує реєстрацію гамма-випромінювання в напрямку від верхньої поверхні радіоактивного об'єкта можна використати напівпровідниковий детектор, який доцільно забезпечити пристроєм для охолодження напівпровідникового детектора, зокрема посудиною Дьюара з рідким азотом. В якості детекторів, які забезпечують реєстрацію гамма-випромінювання по напрямку від бічної поверхні радіоактивного об'єкта можна використати сцинтиляційні детектори. Система може мати систему повітряної завіси детекторів. Кількість сцинтиляційних детекторів, що забезпечують реєстрацію гамма-випромінювання по напрямку від бічної поверхні радіоактивного об'єкта, переважно становить, щонайменше, 6 детекторів. На кожному пристрої доцільно розмістити, щонайменше, по одному детектору. Детектори, які забезпечують реєстрацію гамма-випромінювання по напрямку від бічної поверхні радіоактивного об'єкта, можуть бути розміщені на пристроях з можливістю вертикального переміщення, зокрема по напрямних пристроїв. В якості пристроїв для розміщення сцинтиляційних детекторів можна використати вертикально орієнтовані етажерки. У системі переважно може бути передбачений конвеєр, що забезпечує автоматизоване навантаження радіоактивного об'єкта на засіб для транспортування й автоматизоване розвантаження засобу для транспортування. Технічним результатом корисної моделі є створення системи для характеризації радіоактивних об'єктів і автоматичного керування вимірами й характеризацією упаковок радіоактивних відходів. Система дозволяє з високою точністю аналізувати радіоактивні відходи різного складу в упаковках 5 різного типу, наприклад: спалимі відходи, пресовані в тюки, іонообмінні смоли в пластикових контейнерах, неспалимі відходи в ISOнапівконтейнерах. Конструкція механічної частини системи забезпечує безпечне навантаження й доставку об'єкта до вимірювального модуля, автоматизовану коректування положення радіоактивного об'єкта відносно детекторів гаммавипромінювання і наступну автоматизовану доставку об'єкта, наприклад, до місця зберігання. Оснащення системи декількома детекторами гамма-випромінювання, розміщеними в певному положенні відносно аналізованого об'єкта і пов'язаними з модулем обробки й накопичення інформації, дозволяє здійснювати практично повну характеризацію вмісту упаковок радіоактивних відходів, яка включає в себе визначення просторового розподілу активності по об'єму об'єкта, визначення активності важковимірюваних радіонуклідів по заданому нуклідному вектору, підтвердження класу відходів і додаткові операції, наприклад, автоматизоване маркування об'єкта. Наявність модуля автоматичного керування забезпечує безпеку системи й підвищує точність вимірів. Нижче сутність корисної моделі пояснюється більш детально з посиланням на прикладені схематичні креслення, на яких зображене наступне: фіг. 1 представляє схематичний перспективний вид вимірювального модуля, встановленого на напрямних, закріплених на стінах приміщення, у якому проводиться характеризація радіоактивного об'єкта; засобу для транспортування радіоактивного об'єкта і таль для навантаження радіоактивного об'єкта на засіб для транспортування; фіг. 2 представляє схематичний вид спереду вимірювального модуля, у якому напівпровідниковий детектор має охолодний пристрій, а пристрої для сцинтиляційних детекторів виконані у вигляді вертикально орієнтованих етажерок; фіг. 3 представляє схематичний вид спереду системи для характеризації радіоактивних об'єктів; платформа вимірювального модуля встановлена на рамі з напрямними; напівпровідниковий детектор має охолоджуючий пристрій; радіоактивний об'єкт навантажений на рейковий візок; частина модуля автоматичного керування конструктивно об'єднана в один корпус із модулем обробки й накопичення інформації; фіг. 4 представляє перспективний вид вимірювального модуля, установленого на напрямних закріплених на стінах приміщення; навантаженого рейкового візка; ручної талі для навантаження / розвантаження радіоактивного об'єкта. Позиції на кресленнях позначають; 1 - засіб для транспортування радіоактивного об'єкта; 2 фіксатори положення радіоактивного об'єкта на візку; 3 - рейковий шлях; 4 - корпус, в якому розміщена частина модуля автоматичного керування і модуль обробки й накопичення інформації; 5 - рухома горизонтальна платформа вимірювального модуля; 6 й 7 - детектори гамма-випромінювання (в окремому випадку виконання корисної моделі 6 - напівпровідниковий детектор, який має пристрій охолодження, 7 - сцинтиляційні детектори); 8 43136 6 опорні напрямні; 9 - привід рухомої платформи вимірювального модуля; 10 - пристрій для розміщення детекторів гамма-випромінювання; 11 огородження робочої площадки рухомої платформи; 12 - опорні колеса рухомої платформи; 13 ручна таль. Засіб 1 для транспортування радіоактивного об'єкта, переважно упаковки / упаковок радіоактивних об'єктів (далі по тексту - УРО), показаний на фіг. 1, 3 й 4, є тільки прикладом засобу 1 для транспортування у вигляді рейкового візка 1. Для коректування положення УРО на платформі візка 1 він має систему центрування УРО в поздовжньому й поперечному напрямку, зокрема рухомою платформою для установлення (на фіг. не показана). Для забезпечення необхідної точності положення УРО на візку 1 платформа переважно має фіксатори 2 положення УРО, що компенсують можливу погрішність розміщення УРО на візку 1. Візок 1 має автоматичну системою виміру ваги УРО (на фіг. не показана), що представляє собою, наприклад, декілька тензодатчиків, змонтованих на візку 1, забезпечених вимірювальним блоком. Рух візка 1 коректується з використанням пульта дистанційного керування. Частотно регульована система приводу (на фіг. не показана) візка 1 забезпечує оптимальні швидкості переміщення й необхідну точність положення візка 1 як при навантаженні УРО, так й у приміщенні, де виконуються виміри і проводиться характеризація УРО. Електроживлення двигуна приводу візка 1 здійснюється за допомогою кабелю, який намотаний на барабан пристрою укладання кабелю (на фіг. не показано). Пристрій укладання кабелю має напрямний механізм, який укладає кабель на підлогу в спеціально організоване місце. Вимірювальний модуль, показаний на фіг. 1 4, є тільки прикладом вимірювального модуля. Рухома горизонтальна платформа 5 вимірювального модуля слугує для розміщення детекторів гамма-випромінювання 6 й 7 у просторових координатах приміщення й для переміщення детекторів 6 й 7 у горизонтальному напрямку. Переміщення рухомої платформи 5 здійснюється, зокрема по опорним напрямним 8. Необхідна точність положення платформи 5 і необхідна швидкість її переміщення забезпечується наявністю частотне регульованого приводу 9. Рухома платформа 5 із прикріпленими до її нижньої поверхні пристроями 10 для розміщення детекторів 7 установлена і переміщається уздовж усього приміщення по напрямним 8, закріпленим на стінах/опорах. Рухома платформа 5 може бути виконана у вигляді звареного каркаса з сталевих поздовжніх і поперечних профілів, до яких зверху приварений профільний лист, що формує робочу площадку для розміщення детектора/детекторів 6 і для обслуговування вимірювальної апаратури робочим персоналом. По периметру робочої площадки платформи 5 установлене огородження 11. В крайніх правому і лівому поперечних профілях каркаса платформи 5 установлені опорні колеса 12. Опорні колеса 12 кінематичне пов'язані з приводом 9 рухомої платформи 5. Конструкція пристроїв 10 для розміщення детекторів 7 дозволяє регулювати положення 7 детекторів 7 відносно УРО у вертикальному напрямку. Вимірювальний модуль може включати шість сцинтиляційних детекторів 7 (наприклад, типу БДКГ-11), один напівпровідниковий детектор 6 з відносною ефективністю 20%, пристрій для охолодження (на фіг. окремою позицією не позначено) напівпровідникового детектора 6, систему повітряної завіси детекторів 6 й 7. Система повітряної завіси (на фіг. не показана) детекторів 6 й 7 являє собою комплекс технічних засобів для обдування робочої поверхні детекторів 6 й 7 для виключення температурного дрейфу при реєстрації гамма-випромінювання. Охолодження напівпровідникового детектора 6 забезпечується, зокрема посудиною Дьюара з рідким азотом. Керування вимірювальним модулем здійснюється від модуля автоматичного керування, пов'язаного з модулем накопичення й обробки інформації, а також за допомогою ручного пульта керування при обслуговуванні на місці робочим персоналом. Модуль автоматичного керування, включає контролер керування, релейні елементи керуванням приводами, блок коректування (на фіг. не показані) положення УРО на візку 1 і позиції самого візка 1 відносно вимірювального модуля, а також блок телеметрії (на фіг. не показаний), який дозволяє одержувати достовірну й оперативну інформацію про стан всієї системи, визначати причини виникнення небезпеки й запобігати погрозі безпеці життю людей. Блок телеметрії містить кілька кольорових відеокамер (на фіг. не показані), закріплених на стінах приміщення. Інформація, що надходить із відеокамер, накопичується на відеосервері модуля накопичення й обробки інформації. Кожна відеокамера розміщена в пилозахисному і вологонепроникному корпусі й оснащена zoom-об'єктивами, що дозволяє виконувати не тільки загальний огляд приміщення, але й робити візуальне підтвердження правильності положення рухомих елементів системи. Монітор, яким може бути забезпечений модуль накопичення й обробки інформації, забезпечує можливість перегляду даних, що надходять із кожної з обраних або всіх відеокамер одночасно. Блок телеметрії включає датчики, що контролюють працездатність систем забезпечення теплової завіси (у холодний час при відкритті воріт) і забезпечення кліматичних умов для нормальної експлуатації системи. Блок коректування положення УРО на візку 1 і положення візка 1 щодо вимірювального модуля представляє сукупність датчиків, які реєструють положення візка (датчики положення візка), і інфрачервоних оптопар, які контролюють наявність і тип УРО, відповідність геометричних розмірів УРО припустимим безпечним габаритам. Датчики положення візка виконані у вигляді елементів типу "сухий контакт" й об'єднані в блок зворотного зв'язку з двигуном приводу візка 1. Інфрачервоні оптопари розташовані на стінах приміщення у відповідності з типами і розмірами УРО й допуском по відхиленню від припустимих безпечних габаритів. Таким чином, комбінація оптопар, які спрацювали, однозначно визначає наявність і тип УРО. Модуль автоматичного керування пов'язаний з комплексом технічних засобів (на фіг. не показа 43136 8 ний), який забезпечує безпеку системи, що складається з: - сукупності сигнальних засобів, які працюють при русі; - системи блокувань для запобігання виникнення небезпечних ситуацій або ситуацій, що приводять до виходу з ладу устаткування; - засобів світлозвуковой сигналізації при спрацьовуванні блокувань; - засобів екстреної зупинки. Модуль накопичення й обробки інформації являє собою промисловий комп'ютер, на який комутуються детектори 6 й 7, кольорові відеокамери, датчики блоку телеметрії, датчики блоку коректування положення УРО на візку 1 і позиції візка 1. Характеризацію УРО проводять у приміщенні, яке забезпечене автоматизованими воротами з електронним і ручним керуванням, які являють собою електромеханічні ворота з датчиками крайніх положень. Для проведення точних вимірів і одержання достовірних результатів приміщення повинне бути забезпечене системою стабільності кліматичних умов із припливною вентиляцією й рециркуляцією (з електропідігріванням і кондиціонером). Характеризацію УРО здійснюють у такий спосіб. Навантаження УРО на засіб 1 для транспортування, зокрема на рейковий візок 1, здійснюють за допомогою спеціального конвеєра (на фіг. не показаний) або ручної талі 13. Після навантаження УРО, її центрування на платформі візка 1 і виміру ваги УРО візок 1 переміщається по вмонтованим у підлогу горизонтальним ділянкам рейкового шляху 3 і зупиняється, наприклад, у сховищі радіоактивних відходів, під платформою 5, оснащеною, щонайменше , одним напівпровідниковим детектором 6. До цього моменту пристрій 10 з установленими сцинтиляційними детекторами 7 пересунені за допомогою модуля автоматичного керування на відстань, достатню для розміщення УРО в просторі між детекторами 7. Після регулювання вертикального положення детекторів 7 проводиться реєстрація гамма-випромінювання й обробка отриманих результатів. При вимірі здійснюється облік поглинання гамма-випромінювання в радіоактивних відходах й в упаковці (контейнері). Візок 1 транспортується до місця розвантаження; розвантаження УРО з візка 1 здійснюється за допомогою конвеєра або інших розвантажувальних засобів. УРО розміщається в сховище, а візок повертається до місця паркування. За результатами вимірів проводиться оцінка складу гаммавипромінюючих радіонуклідів в УРО для підтвердження коректності призначеного нуклідного вектора. Оцінка дозволяє усунути, при їхній наявності, помилки в інформації, отриманої від постачальника відходів, і підвищити раціональність використання сховища радіоактивних відходів. Система для характеризації радіоактивних об'єктів, переважно упаковок радіоактивних відходів, дозволяє вимірювати, реєструвати й приймати на зберігання наступну кількість упакованих радіоактивних відходів у день: - два стандартних напівконтейнери ISO; 9 43136 - або п'ять упаковок спалимих відходів; - або п'ять контейнерів з іонообмінними смолами. Це забезпечується при наступних умовах експлуатації: - 20 хвилин на один вимір стандартного напівконтейнера ISO; - шість точок виміру одного стандартного напівконтейнера ISO; - 40 хвилин на один вимір упаковки зі спалимими відходами або контейнера з іонообмінними смолами; - одна точка виміру однієї упаковки зі спалимими відходами або одного контейнера з іонообмінними смолами; Комп’ютерна верстка Д. Шеверун 10 -10 хвилин на підготовчі й заключні операції при виконанні вимірів; - одна робоча зміна в день - 6 ефективних робочих годин у зміні; - 245 робочих днів у рік. Корисну модель можна ефективно застосувати для керування вимірами й для характеризації упаковок радіоактивних відходів у буферному сховищі комплексу захоронения відходів, обладнаному комплексом технічних засобів, необхідних для створення нормальних експлуатаційних умов описаної системи. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for characterization of radioactive objects, mostly packs of radioactive wastes
Автори англійськоюDruziahin Aleksei Vladimirovich, Meleta Dmitrii Yevhenovych, Stepanov Aleksii Borisovich, Chyhyr Vadym Vadymovych
Назва патенту російськоюСистема для характеризации радиоактивных объектов, преимущественно упаковок радиоактивных отходов
Автори російськоюДрузягин Алексей Владимирович, Мелета Дмитрий Евгеньевич, Степанов Алексей Борисович, Чигир Вадим Вадимович
МПК / Мітки
Мітки: система, характеризації, упаковок, об'єктів, відходів, радіоактивних, переважно
Код посилання
<a href="https://ua.patents.su/5-43136-sistema-dlya-kharakterizaci-radioaktivnikh-obehktiv-perevazhno-upakovok-radioaktivnikh-vidkhodiv.html" target="_blank" rel="follow" title="База патентів України">Система для характеризації радіоактивних об’єктів, переважно упаковок радіоактивних відходів</a>
Система зберігання і транспортування радіоактивних відходів та спосіб зберігання і транспортування радіоактивних відходів
Номер патенту: 87485
Опубліковано: 27.07.2009
Автори: Вершнік Вернер, Фрайман Міхаел, Гліха Віктор
МПК: G21F 5/14, G21F 5/005
Мітки: відходів, радіоактивних, система, транспортування, зберігання, спосіб
Формула / Реферат:
1. Система зберігання і транспортування для зберігання і транспортування радіоактивних відходів, що включає сховищну ємність (2) для приймання радіоактивних відходів, яка закрита вільно або знімно встановленою кришкою і яка з точки зору екранування радіоактивного випромінювання відповідає вимогам для зберігання в сховищі, зокрема у проміжному сховищі (40), і транспортну ємність (20), виконану з можливістю приймання сховищної ємності (2) для...
Контейнеровоз для небезпечних, переважно радіоактивних відходів
Номер патенту: 72101
Опубліковано: 17.01.2005
Автори: Кабаков Олег Миколайович, Шахов Олександр Опанасович, Холоша Володимир Маркович, Новіков Анатолій Дмитрович
Мітки: небезпечних, переважно, відходів, контейнеровоз, радіоактивних
Формула / Реферат:
1. Контейнеровоз для небезпечних, переважно радіоактивних відходів, що виконаний у вигляді автомобільного шасі та знімного контейнера на його вантажній платформі, при цьому контейнер оснащений опорами, а вантажна платформа - поздовжніми поступальними напрямними для опор контейнера і механізмом його переміщення вздовж напрямних, механізм оснащений засобом зчеплення з контейнером та пристроєм для керування, який відрізняється тим, що на...
Мобільний комплекс для ізоляції радіоактивних відходів від навколишнього середовища
Номер патенту: 4260
Опубліковано: 17.01.2005
Автори: Нікітін Володимир Юхимович, Вовненко Генадій Миколайович, Невідомський Володимир Олександрович
МПК: G21F 9/34
Мітки: комплекс, мобільній, радіоактивних, відходів, навколишнього, ізоляції, середовища
Формула / Реферат:
1. Мобільний комплекс для ізоляції радіоактивних відходів від навколишнього середовища, що містить механізм завантаження, виконаний у вигляді привідного візка з вантажопідйомним засобом, і бокси затарювання, який відрізняється тим, що він оснащений двома суміжними порталами, кожний із яких установлений з можливістю повздовжнього переміщення по напрямних, а бокси затарювання радіоактивних відходів виконані у вигляді залізобетонних посудин, які...
Контейнер для транспортування радіоактивних відходів
Номер патенту: 3051
Опубліковано: 15.10.2004
Автори: Куліков Олександр Павлович, Денгізов Борис Борисович, Толочний Сергій Станіславович, Мурашкін Олександр Олексійович, Шаповалов Віталій Анатолійович, Антропов Андрій Леонідович
МПК: G21F 5/02
Мітки: радіоактивних, контейнер, відходів, транспортування
Формула / Реферат:
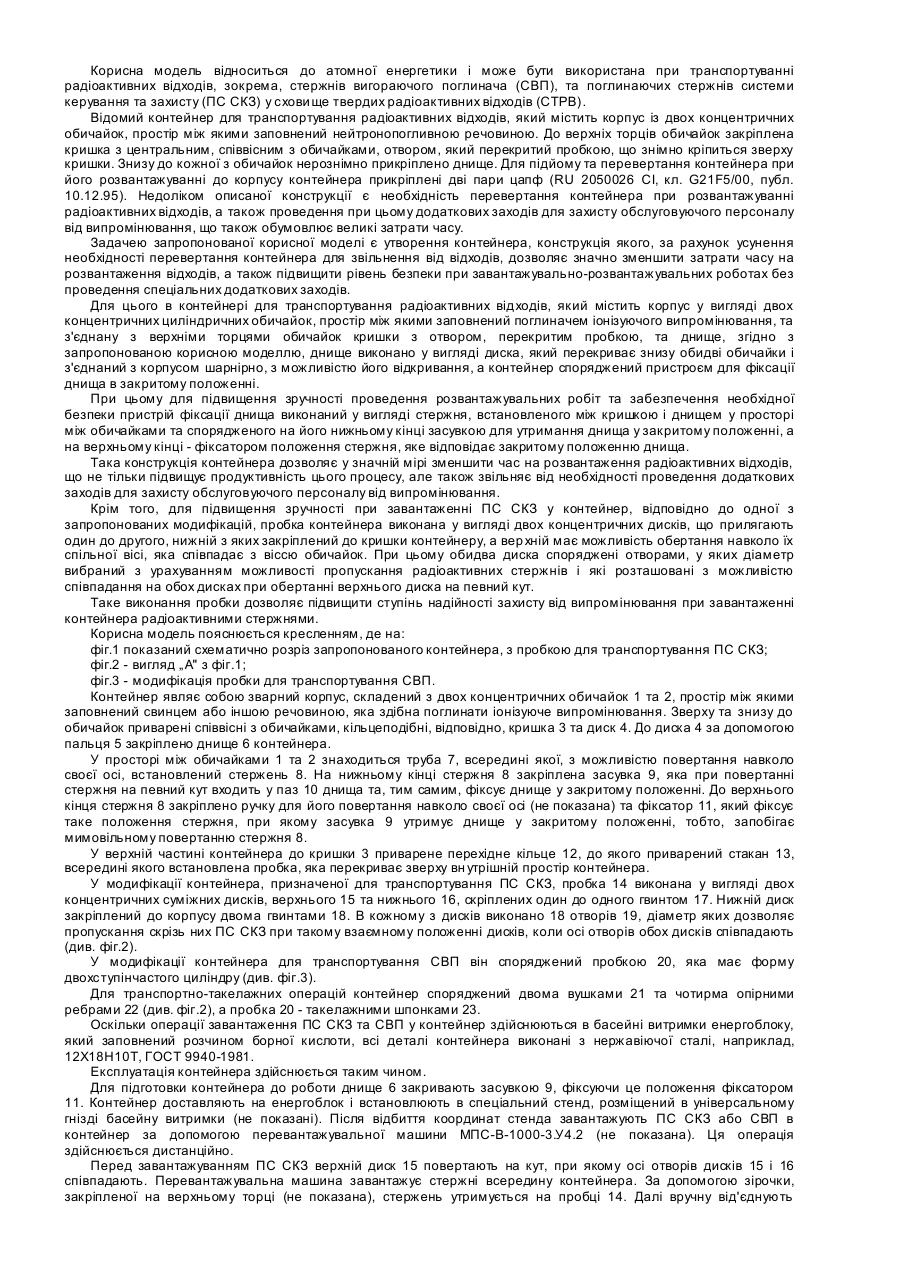
1. Контейнер для транспортування радіоактивних відходів, що містить корпус у вигляді двох концентричних циліндричних обичайок, простір між якими заповнений поглиначем іонізуючого випромінювання, та з'єднану з верхніми торцями обичайок кришки з центральним, співвісним з обичайками, отвором, який перекритий пробкою, та днище, який відрізняється тим, що днище виконано у вигляді диска, який перекриває знизу обидві обичайки і з'єднаний з корпусом...
Контейнер для захоронення токсичних, хімічно активних і радіоактивних відходів
Номер патенту: 80944
Опубліковано: 26.11.2007
Автори: Зайцев Леонід Павлович, Шипко Іван Іванович, Гарник Володимир Кирилович
Мітки: активних, радіоактивних, контейнер, токсичних, захоронення, відходів, хімічної
Формула / Реферат:
Контейнер для захоронення токсичних, хімічно активних та радіоактивних відходів, що містить циліндричний корпус, виконаний як пакет відпрацьованих шин, які примикають одна до одної боковинами і затиснуті між собою в осьовому напрямку тягами, та нижнє і верхнє днища, який відрізняється тим, що між боковинами шин прокладена клейка еластична прокладка, в пакет шин вмонтована циліндрична пластикова ємність зі знімною кришкою, при цьому в шинах...
Попередній патент: Рекламна огорожа
Наступний патент: Спосіб діагностики топографії вірсунгової протоки
Випадковий патент: Спосіб покращення структури грунту